") 自動駕駛車輛的定位與乘員監(jiān)測
自動駕駛車輛的定位與乘員監(jiān)測
定位
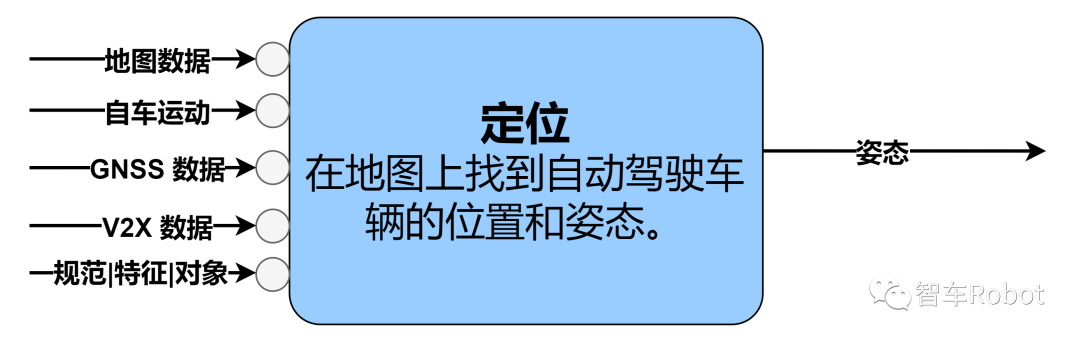
定位功能模塊圖在駕駛員輔助或自動駕駛車輛的背景下,定位是指識別車輛在世界和車輛地圖子系統(tǒng)中的姿態(tài)(位置和方向)的過程。這個過程可能依賴于各種傳感器(全球導航衛(wèi)星系統(tǒng)GNSS、攝像頭、光檢測與測距LiDAR等)的輸入。“定位”涵蓋的范圍很廣。一個簡單的實現(xiàn)可能只包括一些車輛運動與原始GNSS輸出的融合,而一個復雜的實現(xiàn)可能正在處理20個或更多傳感器的輸入,并將接收到的數(shù)據(jù)與地圖中存儲的位置進行比較,地圖每英里可能有10MB以上的地圖數(shù)據(jù)。相關的計算負載從可忽略不計到遠遠超過當前典型汽車嵌入式微控制器的能力。計算負載也將根據(jù)“定位”之前對視覺、激光雷達、雷達和其他傳感器的預處理量而有很大差異。
定位輸入:
?GNSS數(shù)據(jù):用于直接識別地圖上的可能位置。它還可以用于選擇地圖內的興趣區(qū)域,以進行進一步的位置優(yōu)化操作。
?自車運動:可用于改進自身位置和姿態(tài)的估計。
?規(guī)范|特征|對象:將傳感器識別的特征與地圖數(shù)據(jù)中包含的特征進行比較,以改進自身位置和姿態(tài)的估計。
?V2X數(shù)據(jù):與地圖信息進行比較以改進自身位置和姿態(tài)的估計。
?地圖數(shù)據(jù):參考這些數(shù)據(jù)來識別自主車輛最可能的位置。
定位輸出:
?姿態(tài):提供自主車輛在地圖上的最可能位置和方向。
乘員監(jiān)測
乘員監(jiān)測乘客監(jiān)測功能模塊負責觀察車內乘客的狀態(tài),并向輔助駕駛/自動駕駛系統(tǒng)的其他部分提供相關的狀態(tài)數(shù)據(jù)。通過一個或多個專用車內傳感器來感測乘客。可包括對駕駛員的監(jiān)測,和/或對乘客的監(jiān)測,以感知狀態(tài),潛在的醫(yī)療緊急情況,或不當行為狀態(tài)。除了自動駕駛單元以外,還可以由車輛的其他系統(tǒng)提供。例如,車輛駕駛艙控制系統(tǒng)可能包括輔助駕駛/自動駕駛系統(tǒng)所需的乘客監(jiān)測狀態(tài)的超集,如用于車內娛樂的手勢識別。在這種情況下,輸入到這個模塊將是乘客監(jiān)測狀態(tài)。
潛在的乘客監(jiān)測示例:
?駕駛員監(jiān)測系統(tǒng)(DMS):
對于可能需要駕駛員介入/失敗切換的輔助駕駛/自動駕駛系統(tǒng)來說,可以監(jiān)測駕駛員的準備狀態(tài)。準備狀態(tài)可以包括意識、困倦、情緒、健康(例如:心跳檢測)、姿態(tài)等。
?乘客監(jiān)測系統(tǒng): 完全自動化駕駛系統(tǒng)可能需要根據(jù)車內緊急情況(例如:心臟病發(fā)作、癲癇發(fā)作、危險或暴力行為)改變目的地和路線參數(shù)。可以監(jiān)測的參數(shù)包括:
占用的座位、乘客人數(shù)、乘客健康、姿態(tài)等。
?自動駕駛出租系統(tǒng): 可能包括檢測車內遺留的個人物品。
乘客監(jiān)測輸入:?車內傳感器數(shù)據(jù):用于提取車內乘客的信息和狀態(tài)。
乘客監(jiān)測輸出:?乘客狀態(tài):為輔助駕駛/自動駕駛系統(tǒng)的其余部分提供車內乘客的狀態(tài)數(shù)據(jù),例如,用于確定駕駛員能力和乘客狀況。
-
模塊
+關注
關注
7文章
2783瀏覽量
49535 -
汽車電子
+關注
關注
3035文章
8243瀏覽量
169421 -
定位
+關注
關注
5文章
1402瀏覽量
35815 -
自動駕駛
+關注
關注
788文章
14192瀏覽量
169480
發(fā)布評論請先 登錄






 工商網監(jiān)
工商網監(jiān)
評論