 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
本次設(shè)計的簡易智能電動車采用簡單的人工智能技術(shù),使用AT89C52作為小車的檢測和控制核心。根據(jù)題目設(shè)定的行進及具體要求,分別采用紅外傳感器進行尋跡行駛、黑帶采集及變速行駛,采用霍爾元件對小車行駛過程中的速度進行測量,并在終點進行行駛路程的測量,采用直流減速電機對小車實行較精確定位,由LCD顯示出各項功能知識。由數(shù)碼管進行行駛時間顯示,由蜂鳴器及LED構(gòu)成聲光提示電路。最后,小車的運行過程中的各種自動化過程由單片機通過編程實現(xiàn)。
一、方案比較
1.軌跡探測模塊設(shè)計與比較
方案一:用光敏電阻組成光敏探測器。光敏電阻的阻值可以跟隨周圍環(huán)境光線的變化而變化。當光線照射到白線上面時,光線發(fā)射強烈,光線照射到黑線上面時,光線發(fā)射較弱。因此光敏電阻在白線和黑線上方時,阻值會發(fā)生明顯的變化。將阻值的變化值經(jīng)過比較器就可以輸出高低電平。但是這種方案受光照影響很大,不能夠穩(wěn)定的工作。
方案二:紅外探測法,即利用紅外線在不同顏色的物體表面具有不同的反射性質(zhì)的特點,在小車行駛過程中不斷紅外發(fā)射管發(fā)出紅外線,當發(fā)出的紅外線照射到白色的平面后反射,若紅外接收管能接收到反射回的光線則檢測出白線繼而輸出低電平,若接收不到發(fā)射管發(fā)出的光線則檢測出黑線繼而輸出高電平。
單片機就是通過接收到的高低電平為依據(jù)來確定黑線的位置和小車的行走路線。對于發(fā)射和接收紅外線的紅外探頭,可以自己制作或直接采用集成式紅外探頭。
經(jīng)測試,此種方法簡單可靠。
經(jīng)反復對比后,采用方案二。
1、 控制電機方案比較
方案一 :利用步進電機的準確定長步進性能方便的實現(xiàn)調(diào)速和方向的偏轉(zhuǎn),且能準確的測量速度、路程以及時間,簡化編程和硬件連接的工作量。但是步進電機在與機械配合的小車改裝上難度極大,非短時間所能完成。該方案實現(xiàn)較困難。
方案二 :用玩具小車上自帶的雙直流電機,只需對后輪電機進行簡單改造,加上一個齒輪減速裝置即可,兩電機分別負責小汽車的驅(qū)動和轉(zhuǎn)向的功能,依據(jù)外圍紅外反射傳感器所采集到的信息可以補足直流電機定位不準的缺點,同時紅外反射傳感器的使用還能實現(xiàn)比較準確的尋跡行駛,用較好的控制算法及特色硬件來提高小車的整體性能,可具有很高的性能/價格比。
經(jīng)比較驗證,顯然方案一的機械結(jié)構(gòu)也短時間內(nèi)難以滿足題目的要求,而方案二本身是與小車相兼容的,性能也比較好,采用方案二。
2、電機驅(qū)動方案的比較
方案一:采用傳統(tǒng)的功率三極管作為功率放大器的輸出控制直流電機。線性型驅(qū)動的電路結(jié)構(gòu)和原理簡單,成本低,加速能力強,但功率損耗大,特別是低速大轉(zhuǎn)距運行時,通過電阻R的電流大,發(fā)熱厲害,損耗大。
方案二:采用繼電器對電動機的開或關(guān)進行控制,通過開關(guān)的切換對小車的速度進行調(diào)整。此方案的優(yōu)點是電路較為簡單,缺點是繼電器的響應時間慢,易損壞,壽命較短,可靠性不高。
方案三:采用專用芯片L298N作為電機驅(qū)動芯片。L298N是一個具有高電壓大電流的全橋驅(qū)動芯片,它相應頻率高,一片L298N可以分別控制兩個直流電機,而且還帶有控制使能端。用該芯片作為電機驅(qū)動,操作方便,穩(wěn)定性好,性能優(yōu)良。且由L298N結(jié)合單片機可實現(xiàn)對小車速度的精確控制。這種調(diào)速方式有調(diào)速特性優(yōu)良、調(diào)整平滑、調(diào)速范圍廣、過載能力大,能承受頻繁的負載沖擊,還可以實現(xiàn)頻繁的無級快速啟動、制動和反轉(zhuǎn)等優(yōu)點。
因此決定采用L298N控制直流電機。
4、顯示存儲信息和全程時間部分的方案比較
方案一 :用普通的數(shù)碼管來實現(xiàn)顯示功能。這種方法簡單易行,并且適合于硬件操作,但是數(shù)碼管消耗電流特別大,對電源的容量要求很高,而且不能顯示漢字因而難以適應電池供電系統(tǒng)的節(jié)能運行要求。
方案二 :使用液晶顯示板來完成顯示的功能。液晶顯示板的操作需要一定的難度和技巧,而且很容易損壞,所以其硬件需要謹慎使用,但是它解決了數(shù)碼管存在的各種問題,如消耗電能特別小、能顯示多行漢字等。
經(jīng)驗證比較,方案二不但能節(jié)省電能,而且能實現(xiàn)普通數(shù)碼管無法實現(xiàn)的漢字顯示功能。采用方案二。
5、動態(tài)平衡點檢測的方案比較
方案一:采用“液體擺”式慣性器件
液體擺的結(jié)構(gòu)原理是在玻璃殼體內(nèi)裝有導電液,并有三根鉑電極和外部相連接,三根電極相互平行且間距相等,如圖2所示。當殼體水平時,電極插入導電液的深度 相同。如果在兩根電極之間加上幅值相等的交流電壓時,電極之間會形成離子電流,兩根電極之間的液體相當于兩個電阻RI和RIII。若液體擺水平時,則RI =RIII。當玻璃殼體傾斜時,電極間的導電液不相等,三根電極浸入液體的深度也發(fā)生變化,但中間電極浸入深度基本保持不變。如圖3所示,左邊電極浸入深 度小,則導電液減少,導電的離子數(shù)減少,電阻RI增大,相對極則導電液增加,導電的離子數(shù)增加,而使電阻RIII 減少,即RI>RIII。反之,若傾斜方向相反,則RI<RIII。在液體擺的應用中也有根據(jù)液體位置變化引起應變片的變化,從而引起輸出電信號變化而感知傾角的變化。在實用中除此類型外,還有在電解質(zhì)溶液中留下一氣泡,當裝置傾斜時氣泡會運動使電容發(fā)生變化而感應出傾角的“液體擺”。但由于小車在行駛中振動較使得小車在未到達平衡點時由于振動的原因使上面所述的RI =RIII,從而是的小車檢測到假平衡點而發(fā)生誤操作,因此這種方案不可取。我們決定采用方案二
方案二:采用三個集成光電耦合器件,利用小車爬坡時系統(tǒng)產(chǎn)生一定的弧度,使三個光電管在任意時刻至少有一或兩個導通,利用軟件編程實現(xiàn)對整個系統(tǒng)平衡的控制。
方案三:
像尋跡電路那樣采用紅外對管,將3個紅外對管排成一排,在做一個裝有紅外發(fā)射管的單擺,在水平狀況下,使發(fā)射管正對于中間的接收管,當小車爬坡時,單擺與接收管不再垂直,而產(chǎn)生一定傾角,中間的接收管不再接收,基于這種原理,理論上是可行的,但是由于紅外對管受可見光的影響很大,測試結(jié)果與理論相差甚遠。
綜上所述,我們采用方案二
二、系統(tǒng)整體方案設(shè)計與論證
對于本系統(tǒng)來說,要實現(xiàn)的基本目的是能夠在規(guī)定時間內(nèi)使小車分別完成在水平和傾斜兩種狀態(tài)下的從A至B停5秒后再從B退向A端,并分別顯示前進和倒退的時間完成以上任務后,又要使得小車在兩分鐘內(nèi)從有配重物體的蹺蹺板的起始端前進到達板平衡位置處停留5秒以上,并以聲光提示,并顯示所用時間,且配重物體可在板上任意調(diào)節(jié)。基于以上要求并結(jié)合我們所掌握的資料 ,我們共設(shè)計了以下幾種方案。
方案一:題目的要求決定了小車在任何時候都必須“直來直往”,即要求小車是直向行駛的,可以通過做一個絕對標準的蹺蹺板和采用一個性能極其優(yōu)良的電動車,使小車在任何時候僅依靠其物理結(jié)構(gòu)保證在板上是直向行駛的,但受客觀條件的限制,這種方案很難能夠真正的實現(xiàn)。
方案二:采用智能控制方法,使小車在非直線行駛時自動的校正行駛方向,以保證小車在總體上的行駛是直向行駛的,基于此原理我們決定采用尋跡行駛的方案,即在車前下方加上垂直于地面的紅外對管,使之正對于板上的一條黑色軌跡線利用紅外線在不同顏色的物體表面具有不同的反射性質(zhì)的特點,在小車行駛過程中不斷紅外發(fā)射管發(fā)出紅外線,當發(fā)出的紅外線照射到白色的平面后反射,若紅外接收管能接收到反射回的光線則檢測出白線繼而輸出低電平,若接收不到發(fā)射管發(fā)出的光線則檢測出黑線繼而輸出高電平。就是通過單片機接收到的高低電平為依據(jù)來確定黑線的位置和小車的行走路線。
關(guān)于平衡點的檢測,要用到傾角傳感器,這里我們總結(jié)了兩種方案
方案一:采用“液體擺”式慣性器件
液體擺的結(jié)構(gòu)原理是在玻璃殼體內(nèi)裝有導電液,并有三根鉑電極和外部相連接,三根電極相互平行且間距相等,如圖2所示。當殼體水平時,電極插入導電液的深度 相同。如果在兩根電極之間加上幅值相等的交流電壓時,電極之間會形成離子電流,兩根電極之間的液體相當于兩個電阻RI和RIII。若液體擺水平時,則RI =RIII。當玻璃殼體傾斜時,電極間的導電液不相等,三根電極浸入液體的深度也發(fā)生變化,但中間電極浸入深度基本保持不變。如圖3所示,左邊電極浸入深 度小,則導電液減少,導電的離子數(shù)減少,電阻RI增大,相對極則導電液增加,導電的離子數(shù)增加,而使電阻RIII 減少,即RI>RIII。反之,若傾斜方向相反,則RI<RIII。在液體擺的應用中也有根據(jù)液體位置變化引起應變片的變化,從而引起輸出電信號變化而感知傾角的變化。在實用中除此類型外,還有在電解質(zhì)溶液中留下一氣泡,當裝置傾斜時氣泡會運動使電容發(fā)生變化而感應出傾角的“液體擺”。但由于小車在行駛中振動較使得小車在未到達平衡點時由于振動的原因使上面所述的RI =RIII,從而是的小車檢測到假平衡點而發(fā)生誤操作,因此這種方案不可取。我們決定采用方案二采用三個集成光電耦合器件,利用小車爬坡時系統(tǒng)產(chǎn)生一定的弧度,使三個光電管在任意時刻至少有一或兩個導通,利用軟件編程實現(xiàn)對整個系統(tǒng)平衡的控制。
采用三個集成光電耦合器件,利用小車爬坡時系統(tǒng)產(chǎn)生一定的弧度,使三個光電管在任意時刻至少有一或兩個導通,利用軟件編程實現(xiàn)對整個系統(tǒng)平衡的控制采用三個集成光電耦合器件,利用小車爬坡時系統(tǒng)產(chǎn)生一定的弧度,使三個光電管在任意時刻至少有一或兩個導通,利用軟件編程實現(xiàn)對整個系統(tǒng)平衡的控制
三、系統(tǒng)組成、原理和電路圖
系統(tǒng)總體組成框圖如下所示
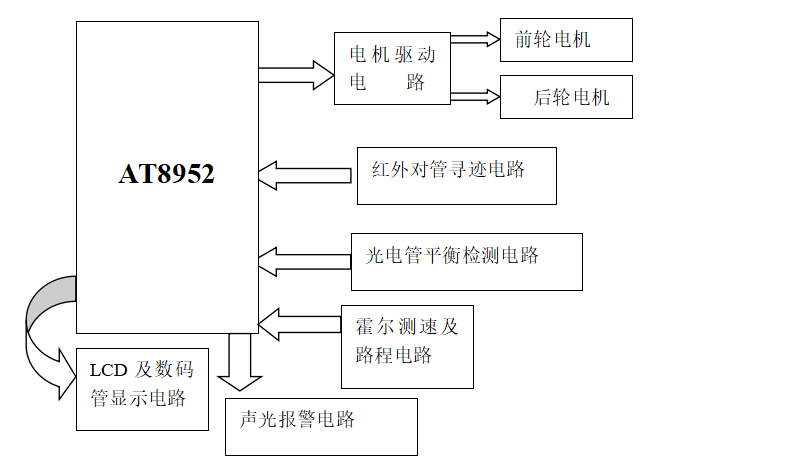
本系統(tǒng)采用AT89S52作為核心控制部件,通過對小車前下端的左中右三對紅外對管組成的尋跡帶你路電路所采集的信號進行分析使小車在行駛偏離正常軌道時及時進行分析校正,以保證其直向行駛;用單片機控制電機專用驅(qū)動芯片驅(qū)動前后兩個電機是后輪做勻速行駛,前輪作為左右轉(zhuǎn)向輪;在后輪上加裝磁鐵,車聲固定霍爾元件使得車輪沒轉(zhuǎn)過一周磁鐵正好正對霍爾元件,使得有霍爾元件組成的地暖露電路輸出高電平,通過單片機對霍爾元件輸出電平的變化進行計數(shù)操作,由此便可得出車速和行程的數(shù)據(jù);類似于小車尋跡的方式,當小車的三對紅外對管都沒有檢測到黑帶時,說明此時小車運行到了蹺蹺板的兩端,單片機執(zhí)行相應的停止操作,并執(zhí)行 相應的時間等數(shù)據(jù)的顯示操作。
- 基于51單片機實現(xiàn)紅外檢測循跡小車的代碼和工程文件免費下載 76次下載
- 使用51單片機實現(xiàn)循跡小車的程序免費下載
- 使用51單片機設(shè)計智能循跡小車的資料和程序免費下載
- 使用51單片機設(shè)計循跡智能小車的詳細資料說明
- 使用51單片機進行循跡智能小車的源程序免費下載
- 使用51單片機進行智能小車五路尋跡程序與PWM驅(qū)動的程序免費下載
- 使用51單片機設(shè)計循跡小車的代碼免費下載
- 使用51單片機設(shè)計智能小車的資料和程序免費下載
- 使用51單片機進行自動循跡智能小車的程序資料免費下載 31次下載
- 使用51單片機進行PWM程序控制智能小車程序免費下載 43次下載
- 使用51單片機進行智能小車設(shè)計的C語言程序和工程文件免費下載 19次下載
- 基于51單片機的智能循跡小車的設(shè)計 182次下載
- 基于51單片機循跡智能小車 19次下載
- 基于51單片機循跡智能小車 278次下載
- 基于51單片機循跡智能小車 0次下載
- 詳解STM32單片機和51單片機的區(qū)別 3.8w次閱讀
- 使用51單片機讀寫AT29C040的C語言程序免費下載 4814次閱讀
- HD44780讀寫單片機C51程序免費下載 4387次閱讀
- 使用HD44780讀寫單片機的C51程序詳細概述 3306次閱讀
- PIC單片機以及51單片機和AVR單片機的IO口操作方法介紹 2052次閱讀
- 51單片機引腳簡介 5.4w次閱讀
- 51單片機的ISP下載電路設(shè)計 3.2w次閱讀
- 如何學習51單片機 5082次閱讀
- 如何對51單片機進行外部擴展 1.5w次閱讀
- 51單片機如何進行模塊化編程 3.2w次閱讀
- 51單片機和AVR單片機有什么區(qū)別 1.3w次閱讀
- 新手學習單片機的首選:51單片機 8840次閱讀
- 基于STC12C5A60S2單片機及PID控制算法的氣味循跡車設(shè)計 3248次閱讀
- 基于 STC12C5A60S2 的智能循跡小車(附傳感器電機驅(qū)動電路圖) 1w次閱讀
- 51單片機學習感悟與51單片機上拉電阻心得 4297次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1電子電路原理第七版PDF電子教材免費下載
- 0.00 MB | 1497次下載 | 免費
- 2單片機典型實例介紹
- 18.19 MB | 98次下載 | 1 積分
- 3S7-200PLC編程實例詳細資料
- 1.17 MB | 27次下載 | 1 積分
- 4筆記本電腦主板的元件識別和講解說明
- 4.28 MB | 18次下載 | 4 積分
- 5開關(guān)電源原理及各功能電路詳解
- 0.38 MB | 14次下載 | 免費
- 6100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 7藍牙設(shè)備在嵌入式領(lǐng)域的廣泛應用
- 0.63 MB | 3次下載 | 免費
- 8基于單片機的紅外風扇遙控
- 0.23 MB | 3次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 2PADS 9.0 2009最新版 -下載
- 0.00 MB | 66304次下載 | 免費
- 3protel99下載protel99軟件下載(中文版)
- 0.00 MB | 51209次下載 | 免費
- 4LabView 8.0 專業(yè)版下載 (3CD完整版)
- 0.00 MB | 51043次下載 | 免費
- 5555集成電路應用800例(新編版)
- 0.00 MB | 33564次下載 | 免費
- 6接口電路圖大全
- 未知 | 30321次下載 | 免費
- 7Multisim 10下載Multisim 10 中文版
- 0.00 MB | 28588次下載 | 免費
- 8開關(guān)電源設(shè)計實例指南
- 未知 | 21540次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537793次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191183次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183278次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138039次下載 | 免費





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論