 電子發(fā)燒友App
電子發(fā)燒友App


在以上呈現(xiàn)的一共13條的Release note當(dāng)中,Tesla的FSD beta團(tuán)隊(duì)展現(xiàn)了一種獨(dú)特的量化風(fēng)格——其中的5條共提供了7處精準(zhǔn)的性能改善百分比數(shù)字。這里面既包含感知部分的性能提升,也包含規(guī)劃和控制部分的性能進(jìn)步。如果再往前追溯FSD beta在v10以來(lái)一共十幾個(gè)子版本(小編:似乎FSD beta在v10這個(gè)大版本階段已經(jīng)停留很久了,前所未有)中,涉及精準(zhǔn)的性能改善百分比數(shù)字更是琳瑯滿目覆蓋自動(dòng)駕駛體系的方方面面。我們不禁要問(wèn)why and how,Tesla提供如此具體的性能改善指標(biāo)?
前段時(shí)間知乎上曾經(jīng)有一個(gè)廣泛受到關(guān)注的問(wèn)題,大意是問(wèn)“對(duì)于自動(dòng)駕駛行業(yè)來(lái)說(shuō),具備哪種核心的技術(shù)能力最為關(guān)鍵?”各種回答幾乎覆蓋了所有自動(dòng)駕駛的技術(shù)環(huán)節(jié),從數(shù)據(jù)規(guī)模到訓(xùn)練方法,再到感知、規(guī)劃和控制模塊,以及各種琳瑯滿目的傳感器和車(chē)載計(jì)算機(jī)、道路覆蓋車(chē)用網(wǎng)絡(luò)…… 每一個(gè)細(xì)分的技術(shù)賽道上都有為數(shù)眾多的擁躉。但似乎沒(méi)人關(guān)注的是這樣一個(gè)事實(shí),不論哪一種技術(shù)細(xì)節(jié),都是建立在“體系”的基礎(chǔ)之上的,只有選擇確立自動(dòng)駕駛系統(tǒng)的“體系”在先,后續(xù)發(fā)展的各種模塊技術(shù)才能在體系下協(xié)調(diào)發(fā)展。所以小編的觀點(diǎn)是:?jiǎn)我辉u(píng)論哪一種細(xì)分技術(shù)在自動(dòng)駕駛系統(tǒng)中的重要性沒(méi)有具體的實(shí)際意義,“體系”建設(shè)和技術(shù)風(fēng)格的確立,對(duì)于長(zhǎng)期競(jìng)爭(zhēng)力的培育才是最重要的。
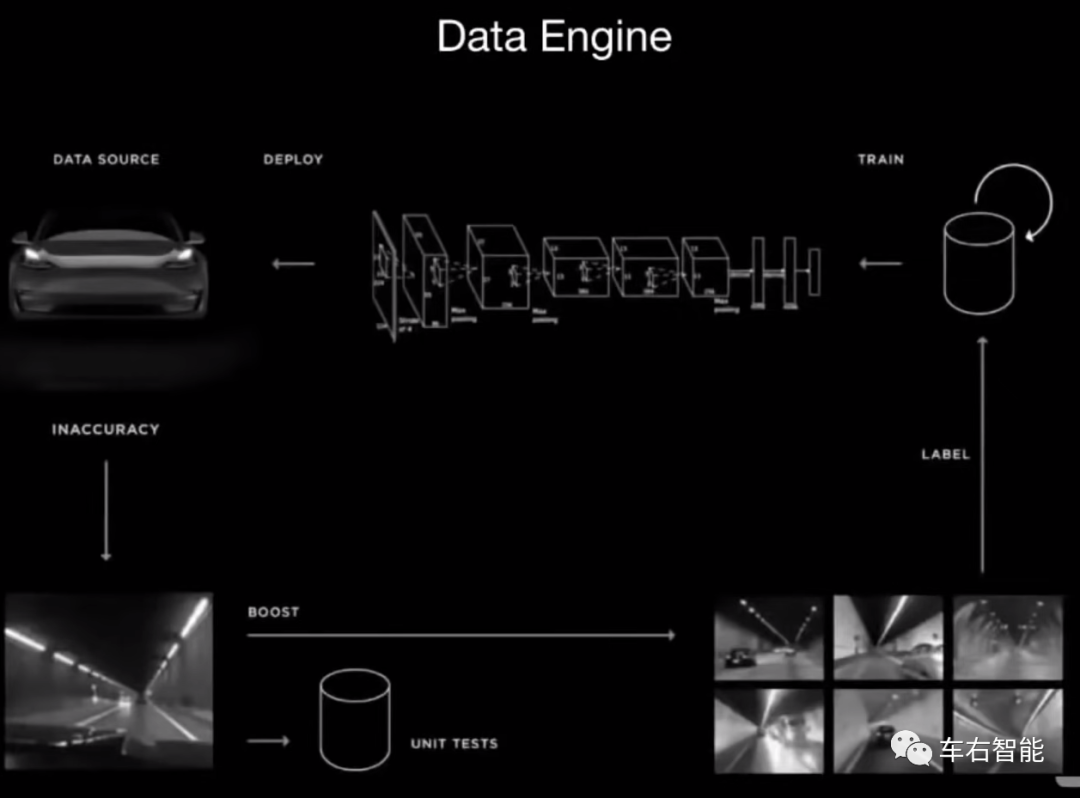
回到Tesla FSD beta v10.11.2的Release note這個(gè)主題上,我們確實(shí)看到Tesla依然在堅(jiān)定地走在:廣泛的量產(chǎn)車(chē)型+單純的視覺(jué)感知+豐厚的仿真和訓(xùn)練平臺(tái)=通暢且封閉的數(shù)據(jù)平臺(tái)基礎(chǔ)之上的。我們?cè)趦扇昵暗谝淮蜹esla AI Day 2019上看到的這個(gè)“老掉牙”的Data Engine數(shù)據(jù)架構(gòu),依然是Tesla自動(dòng)駕駛體系發(fā)展的核心框架。
圖一【Tesla FSD beta v9-43.png】
在過(guò)去的兩年時(shí)間里,通過(guò)越來(lái)越多的信息披露,我們對(duì)于Tesla的Data Engine有了更多較為具體的理解。比如從龐大的存量車(chē)隊(duì)中如何激發(fā)Inaccuracy狀態(tài)數(shù)據(jù)上報(bào)的機(jī)制;Boost倍增后的海量相似場(chǎng)景如何實(shí)現(xiàn)自動(dòng)標(biāo)注;以及Tesla逐漸曝光的訓(xùn)練平臺(tái)Dojo等等。但Tesla一直維持著關(guān)鍵的技術(shù)節(jié)點(diǎn)屬性不變(小編:堅(jiān)持純視覺(jué)傳感器路線不變,甚至取消了典型的車(chē)載雷達(dá)),而僅僅做部件規(guī)格和性能上的提升,就可以堅(jiān)持在自己的Data Engine平臺(tái)上逼近L4。
可能有很多從業(yè)同行已經(jīng)厭倦了大嘴巴的Elon Musk激進(jìn)風(fēng)格,不著邊際的承諾一次又一次落空。但與此同時(shí)我們也應(yīng)該注意到,在領(lǐng)先的自動(dòng)駕駛技術(shù)公司中,Tesla是唯一的技術(shù)路線上堅(jiān)定、市場(chǎng)策略上一貫,客觀上也能同時(shí)在量產(chǎn)產(chǎn)品和FSD beta測(cè)試范圍內(nèi)保持不停頓的技術(shù)迭代的技術(shù)實(shí)體……從這個(gè)角度看,毫不夸張地說(shuō),堪稱(chēng)碩果僅存。所以,產(chǎn)業(yè)內(nèi)外與其把關(guān)注的焦點(diǎn)放在Elon Musk又吹了多少次牛皮、承諾的升級(jí)節(jié)點(diǎn)遲遲不能兌現(xiàn)上,不如把注意力集中在如何看待Tesla在發(fā)展過(guò)程中,呈現(xiàn)出來(lái)越來(lái)越多浮出水面的技術(shù)線索上。
圖二【Tesla FSD beta v9-41.png】
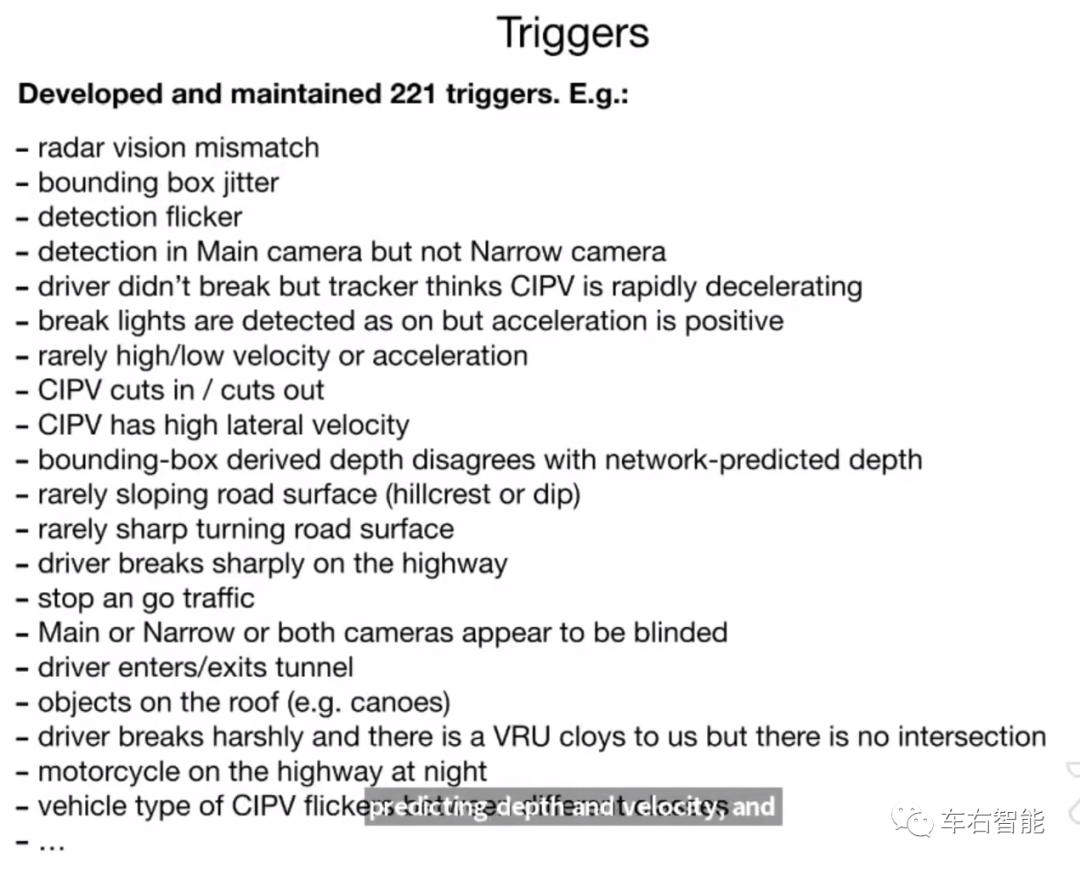
上圖2為例,這是一年前當(dāng)Tesla決定在FSD beta版本上完全放棄Radar之后所做出的技術(shù)說(shuō)明。我們?cè)诋?dāng)期公眾號(hào)文章《聯(lián)結(jié)主義AI技術(shù)在Tesla Vision技術(shù)體系中的地位和未來(lái)》有相對(duì)詳細(xì)的部分參數(shù)介紹,感興趣的讀者可以移步。這些具體的Triggers參數(shù)的重要性在于,它讓我們認(rèn)識(shí)到Tesla是如何同時(shí)在規(guī)模龐大的保有車(chē)隊(duì)中(200萬(wàn)輛規(guī)模)和活躍度頗高的FSD beta測(cè)試車(chē)隊(duì)中(2000輛規(guī)模)抓取關(guān)鍵數(shù)據(jù)的,而非泛泛的所謂“陰影模式”。
從搜集人類(lèi)駕駛員關(guān)鍵駕駛行為和策略的shadow mode,到當(dāng)研發(fā)團(tuán)隊(duì)決定對(duì)雷達(dá)傳感器做減法時(shí),可以定制和搜集的各種對(duì)于視覺(jué)傳感器的“校準(zhǔn)數(shù)據(jù)”Trigger。這種不變應(yīng)萬(wàn)變的數(shù)據(jù)閉環(huán)能力,恰恰是以機(jī)器學(xué)習(xí)為主的AI的核心要義:只要保證數(shù)據(jù)搜集的渠道暢通、數(shù)據(jù)質(zhì)量足夠好,Tesla就會(huì)一直前進(jìn)。
TeslaFSD beta v10.11.2實(shí)測(cè)表現(xiàn)亮點(diǎn)
空口無(wú)憑,我們?cè)诒酒谖恼吕镞€是以FSD beta v10.11.2的實(shí)際道路測(cè)試觀測(cè)為主要內(nèi)容。在我們能能找到的公開(kāi)道路測(cè)試結(jié)果中,去逐一“視覺(jué)驗(yàn)證”v10.11.2的release note是否真的涉及如此眾多的技術(shù)改善,以及改善效果?我們選擇了畫(huà)面質(zhì)量和記錄視角一貫是最好水平的@Frenchie,請(qǐng)跟著小編一起觀察FSD beta進(jìn)化證據(jù)的關(guān)鍵細(xì)節(jié)。
1 Creeping profile with higher jerk:
視頻中,當(dāng)車(chē)輛抵近丁字路口并觀察到合適的并入機(jī)會(huì)時(shí),以往FSD beta中的保守creep動(dòng)作(小編:creeping,是一種緩慢地、保守地遞進(jìn)觀察和進(jìn)入路口區(qū)域的低速行駛行為)被取代為更激進(jìn)和快提速Jerk的左轉(zhuǎn)進(jìn)入行為。小編相信這個(gè)變化是因?yàn)閷?duì)歷史上FSD beta各版本的行為數(shù)據(jù)觀察之后得到的修正,也更符合人類(lèi)駕駛習(xí)慣。在城市道路環(huán)境下(小編:視頻的實(shí)測(cè)地點(diǎn)是芝加哥鬧市區(qū)),猶猶豫豫將會(huì)造成局部的交通擁堵和事實(shí)上的不安全境地。
這種creeping行為的明顯改善,或者說(shuō)果斷,符合FSD beta v10.11.2的release note中的第六條:-6 ?Improved creeping profile withhigher jerk when creeping starts and ends.//小編:改善了車(chē)輛進(jìn)入路口時(shí)的creeping profile,增加了更快提速的選項(xiàng);
2 Improved right-of-way understanding:
視頻中,當(dāng)車(chē)輛行駛在芝加哥較為常見(jiàn)的城市軌道交通支架下行線時(shí),遭受著視覺(jué)和電磁信號(hào)的雙重惡劣駕駛環(huán)境。視覺(jué)干擾來(lái)自穿透鐵軌投射在路面上的點(diǎn)線陽(yáng)光耀斑,和路面白色道路分割虛線類(lèi)似,對(duì)于FSD的視覺(jué)系統(tǒng)構(gòu)成非常的考驗(yàn);電磁信號(hào)的惡劣環(huán)境同樣是由于鐵軌系統(tǒng)造成的,巨大的鋼結(jié)構(gòu)和道路兩側(cè)的高大建筑物是GPS信號(hào)的致命破壞,這是“城市峽谷”+“鋼結(jié)構(gòu)屏蔽效應(yīng)”的疊加。實(shí)際上車(chē)主Frenchie在路測(cè)中也抱怨Tesla Model 3的GPS系統(tǒng)在芝加哥的鬧市區(qū)經(jīng)常出錯(cuò),由于不可忽視的定位誤差,有時(shí)會(huì)導(dǎo)致Waypoint路徑點(diǎn)之間的線路受到錯(cuò)誤定位的影響而進(jìn)入重新路徑計(jì)算。
實(shí)際上我們?cè)谝曨l4中也可以看到,當(dāng)Model 3車(chē)輛穿越十字路口時(shí),由于需要即時(shí)判別新進(jìn)路段的道路結(jié)構(gòu),尤其是在光線的干擾下,Model 3的FSD beta選擇了降速,并明顯有變道行為來(lái)修正之前的識(shí)別誤差。
這種right-of-way的對(duì)于外部環(huán)境的理解能力,我們很早就在Tesla FSD beta的路測(cè)中觀察到了,隨著證據(jù)越來(lái)越多也進(jìn)一步得到證實(shí)。Tesla的自動(dòng)駕駛策略是堅(jiān)持單車(chē)能力,盡可能降低對(duì)外界條件的依賴(lài)。這個(gè)能力體現(xiàn),符合FSD beta v10.11.2的release note中的第三條:-3 Improved right-of-way understanding if the map is inaccurate or thecar cannot follow the navigation. ?Inparticular,modeling intersection extents is now entirely based on networkpredictions, and no longer uses map-based heuristics.//小編:改善主車(chē)對(duì)于道路結(jié)構(gòu)識(shí)別的即時(shí)性,在高精地圖數(shù)據(jù)失效而無(wú)法利用時(shí),以主車(chē)識(shí)別結(jié)果為準(zhǔn)。在道路路口場(chǎng)景下,完全依賴(lài)主車(chē)的即時(shí)識(shí)別結(jié)果;
3 Improved the precision of VRU detections:
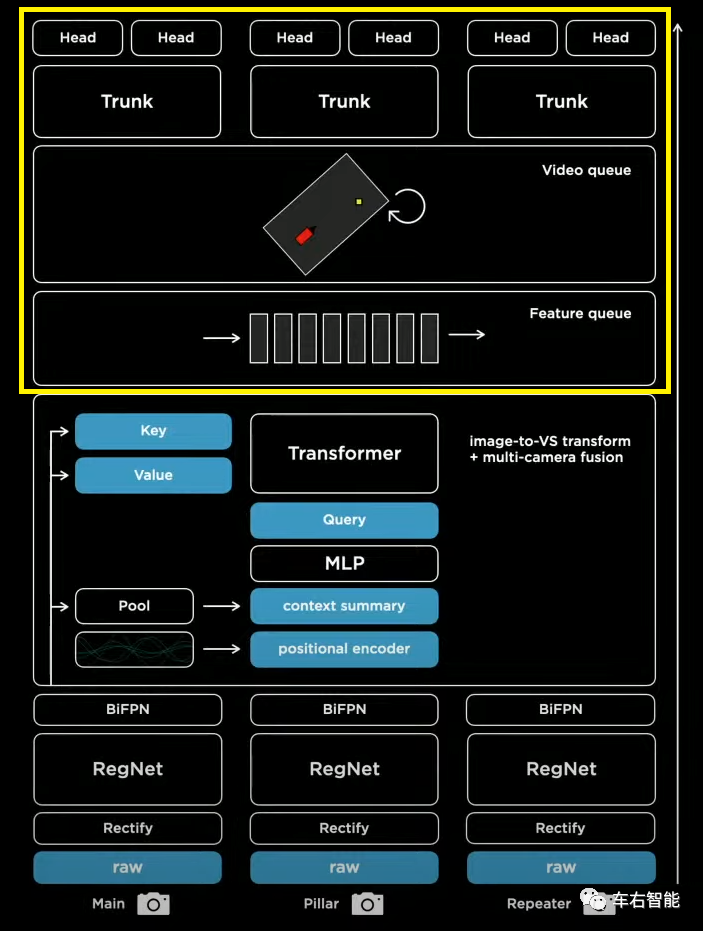
視頻5的開(kāi)始階段,在道路左側(cè)的行人先后被轉(zhuǎn)彎車(chē)輛和鐵軌支柱遮擋,但車(chē)輛中控屏幕的UI顯示始終沒(méi)有丟掉對(duì)于這個(gè)行人的識(shí)別和跟蹤,雖然有時(shí)會(huì)出現(xiàn)對(duì)于目標(biāo)前進(jìn)方向預(yù)測(cè)的失誤,也是短暫的。這個(gè)符合去年Tesla AI DAY上的官方展示:即通過(guò)Transformer構(gòu)造的BEV空間信息流中,將每一幀feature通過(guò)Feature Queue隊(duì)列機(jī)制在時(shí)間軸上構(gòu)成連續(xù)時(shí)間流尺度(小編:也許是10-15s范圍內(nèi)),對(duì)外界事物進(jìn)行描述;與此同時(shí)還需要利用車(chē)體姿態(tài)的慣性傳感器(INS)輸出,來(lái)在上述時(shí)間流尺度范圍內(nèi),利用Video Queue隊(duì)列繼續(xù)構(gòu)造地理上的連續(xù)空間尺度(小編:當(dāng)然這里還有個(gè)目標(biāo)物追蹤的問(wèn)題需要處理)。如此,在指定的時(shí)間+空間范疇內(nèi),感知信息將會(huì)得到類(lèi)似上下文context的銜接處理,從而為后端的預(yù)測(cè)、規(guī)劃和控制模塊提供更好的數(shù)據(jù)輸入。
參照下圖6,感知系統(tǒng)在盡可能模仿人類(lèi)的視覺(jué)+腦能力,不僅僅是看到,并辨識(shí)出物體的位置、尺寸、速度和語(yǔ)義信息,還需要在這個(gè)基礎(chǔ)上,記住關(guān)鍵的、有時(shí)效性的外界道路參與者尤其弱勢(shì)群體VRU的局部歷史信息,這對(duì)于提升系統(tǒng)安全性善莫大焉。Elon Musk在很多場(chǎng)合都會(huì)舉這個(gè)例子:當(dāng)你駕駛車(chē)輛看到路旁一個(gè)小朋友消失在一輛停泊在路邊的公共汽車(chē)尾部的時(shí)候,你就會(huì)特別小心駕駛車(chē)輛駛過(guò)這部公共汽車(chē)的頭部。因?yàn)槟銜?huì)擔(dān)心這個(gè)在視覺(jué)上“消失的”小朋友可能會(huì)在公共汽車(chē)車(chē)頭突然出現(xiàn)而來(lái)不及剎車(chē),提前降速是一個(gè)明智的選擇,也是人類(lèi)的智慧體現(xiàn)。
圖六【Tesla FSD beta v101102-4.png】
圖6黃色框內(nèi)所體現(xiàn)的網(wǎng)絡(luò)結(jié)構(gòu),就是構(gòu)建在BEV俯視圖基礎(chǔ)上的連續(xù)時(shí)間+空間識(shí)別feature,在此基礎(chǔ)之上進(jìn)一步實(shí)現(xiàn)標(biāo)準(zhǔn)的各個(gè)識(shí)別子任務(wù)。還是舉那個(gè)小朋友消失在停泊在路邊的大型公共車(chē)輛背后的例子:如果Tesla的FSD或者全體車(chē)隊(duì)可以不斷反饋類(lèi)似視覺(jué)場(chǎng)景(小編:各種孩子、人力車(chē)等VRU闖入道路空間并消失在某些障礙后部),那么后臺(tái)的Dojo就可以在類(lèi)似數(shù)據(jù)標(biāo)注完備的基礎(chǔ)上,用這種結(jié)構(gòu)化的場(chǎng)景去訓(xùn)練FSD的規(guī)劃模塊——Deep Reinforcement Learning的模塊會(huì)在訓(xùn)練中被系統(tǒng)通過(guò)reward獎(jiǎng)勵(lì)告知,當(dāng)遇到明確的VRU目標(biāo)在道路范圍內(nèi)消失在遮擋物范圍后的場(chǎng)景下,主動(dòng)降速進(jìn)入保守狀態(tài)反而可以獲得更多的獎(jiǎng)勵(lì)。如此往復(fù),基于DRL的規(guī)劃模塊就會(huì)具備類(lèi)人思考的能力。
回到視頻5,當(dāng)車(chē)輛在路口等候紅燈時(shí),我們也有一個(gè)較為全面的視角觀察車(chē)輛視覺(jué)系統(tǒng)對(duì)于外界行人等VRU目標(biāo)的識(shí)別效果觀察,感官上確實(shí)做到比之前的版本更好、更流暢和更準(zhǔn)確。這個(gè)變化符合FSD beta v10.11.2的release note中的第六條:-4 ?Improved the precision of VRUdetections by 44.9%,dramatically reducingspurious false positive pedestrians and bicycles (especially around tar seams, skid marks, and raindrops)。? This was accomplished byincreasing the data size of the next-gen auto-labeler, training networkparameters that were previously frozen, and modifying the network lossfunctions。? We find that this decreases theincidence of VRU-related false slowdowns.//小編:針對(duì)VRU-弱勢(shì)道路使用者的識(shí)別精度提升了44.9%!特別是在各種道路環(huán)境干擾條件下,可大幅度降低對(duì)于行人和自行車(chē)的假陽(yáng)性錯(cuò)誤識(shí)別結(jié)果。這個(gè)精準(zhǔn)的百分比貢獻(xiàn)來(lái)自于下一代auto-labeler自動(dòng)標(biāo)注系統(tǒng)所提供大量有效的訓(xùn)練數(shù)據(jù),將之前版本的模型參數(shù)進(jìn)一步改進(jìn);
4 More accurate predictions of vehicles:
以上視頻7中,F(xiàn)SD beta主車(chē)展示了一次“不同尋常”的變線超車(chē)行為。按照路線規(guī)劃,主車(chē)在直行通過(guò)當(dāng)前路口之后,應(yīng)該在下一個(gè)路口(小編:目測(cè)150米左右)執(zhí)行右轉(zhuǎn)動(dòng)作。如果此時(shí)主車(chē)的自身位置和地圖信息都是清晰和準(zhǔn)確的,那么按照路線規(guī)劃慣例,在距離右轉(zhuǎn)路口150m的地方大概率應(yīng)該保持右側(cè)車(chē)道行駛(小編:此時(shí)道路環(huán)境為單向雙車(chē)道),而避免主動(dòng)變?nèi)胱髠?cè)車(chē)道后無(wú)法變回右轉(zhuǎn)車(chē)道。這種情況下,較為保守的跟車(chē)行為將會(huì)確保安全右轉(zhuǎn),應(yīng)該是執(zhí)行概率更大的路徑規(guī)劃結(jié)果。
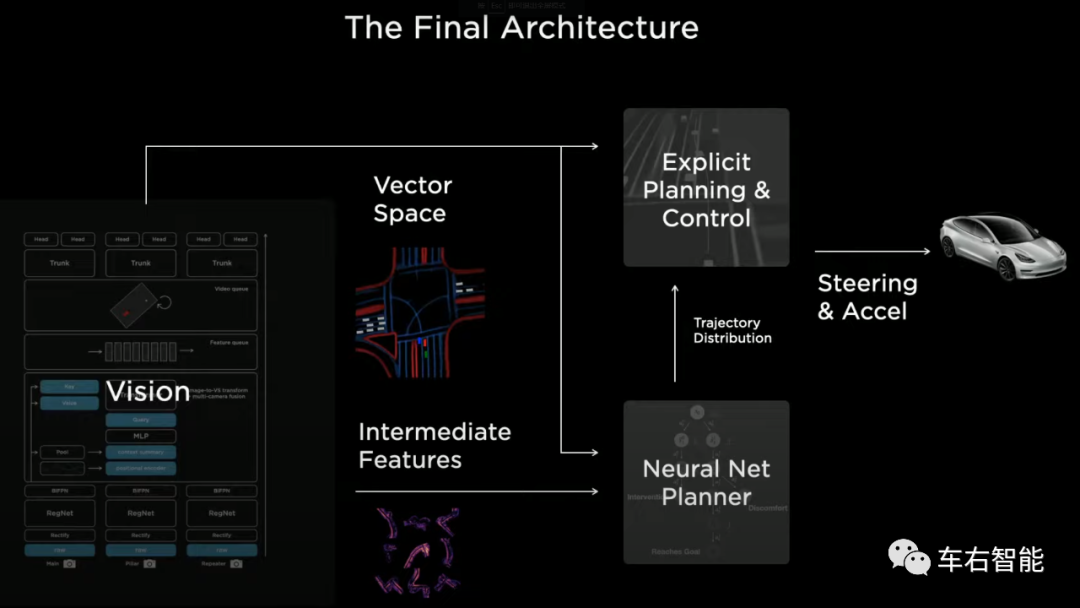
當(dāng)主車(chē)觀察到本車(chē)道前方兩輛車(chē)輛實(shí)體都出現(xiàn)剎車(chē)燈點(diǎn)亮狀態(tài),且前車(chē)(小編:兩車(chē)中的前車(chē))出現(xiàn)明顯的偏移行為顯示其靠路邊臨時(shí)泊車(chē)的意圖時(shí),主車(chē)開(kāi)始選擇右側(cè)換道超車(chē),并在完成超越之后,且右轉(zhuǎn)路口未到之前返回左側(cè)車(chē)道。總體來(lái)說(shuō),主車(chē)的這個(gè)行為在這個(gè)場(chǎng)景和這個(gè)時(shí)機(jī)下,是一個(gè)在效率和風(fēng)險(xiǎn)之間平衡較好的、較為合理的路徑規(guī)劃決策。我們?cè)?021年度Tesla AI Day上曾經(jīng)聽(tīng)到較為完整的Planning and control module的介紹(by ashok),其中也提及過(guò)類(lèi)似臨近路口如何做便道選擇的介紹。相比較來(lái)說(shuō),我們認(rèn)為在視頻7中的換道超車(chē)選擇,更多是NN of Planning的選擇,而非傳統(tǒng)的路徑規(guī)劃輸出的結(jié)果(小編:因?yàn)閭鹘y(tǒng)模式比如S-L路線規(guī)劃往往更為保守,不會(huì)選擇激進(jìn)的但有可能錯(cuò)過(guò)轉(zhuǎn)彎路口的規(guī)劃結(jié)果)。類(lèi)似行為如果越來(lái)越多被觀察到,我們就可以越來(lái)越確信龐大fleet所貢獻(xiàn)的各種數(shù)據(jù),在后臺(tái)Dojo的處理下,對(duì)于FSD beta的決策規(guī)劃系統(tǒng)訓(xùn)練,產(chǎn)生了越來(lái)越正面的影響。
圖九【Tesla FSD beta v10-11.png】
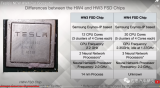
請(qǐng)注意上圖9中的Neural Net Planner部分。Tesla FSD beta所展現(xiàn)的這種果斷的、類(lèi)人的換道超車(chē)行為,歸功于此部分的決策輸出在很大程度上左右了最終的主車(chē)行為。當(dāng)然,這個(gè)變化符合release note當(dāng)中的第2條和第8條,如下:
-2 ?Use more accurate predictions of wherevehicles are turning, or merging to reduce unnecessary slowdowns for vehicles that will notcross our path.//小編:針對(duì)它車(chē)行為,提供更精準(zhǔn)的掉頭和并線預(yù)測(cè),減少主車(chē)的非必要?jiǎng)x車(chē)行為;
-8 ?Reduced vehicle “parked” attribute error rateby 17%,achieved byincreasing the dataset size by 14%.? Also improved brake lightaccuracy.//小編:將它車(chē)狀態(tài)標(biāo)記為“停車(chē)狀態(tài)”的錯(cuò)誤率改善了17%,同樣改善了對(duì)于它車(chē)剎車(chē)燈識(shí)別的準(zhǔn)確率。這是通過(guò)不斷擴(kuò)張的訓(xùn)練數(shù)據(jù)庫(kù)(增加了14%的有效訓(xùn)練數(shù)據(jù))來(lái)達(dá)到的;
5 Understanding intersection extents based on network predictions:
以上視頻10,充分顯示了FSD beta決策規(guī)劃模塊高度依賴(lài)視覺(jué)系統(tǒng)即時(shí)感知確立道路結(jié)構(gòu),而非先驗(yàn)的高精地圖信息。當(dāng)主車(chē)右轉(zhuǎn)進(jìn)入四車(chē)道道路結(jié)構(gòu)的時(shí)候,由于視角和距離的問(wèn)題,F(xiàn)SD視覺(jué)系統(tǒng)的即時(shí)感知并無(wú)法斷定關(guān)鍵的路口道路結(jié)構(gòu)(小編:這里的路口指的是下一個(gè)路口)。而近在咫尺,最多目測(cè)也就100-150m的十字路口,只會(huì)給主車(chē)正常行駛提供非常短的預(yù)判斷時(shí)間。
在這個(gè)距離上,主車(chē)camera并無(wú)法立刻識(shí)別下一個(gè)路口的道路結(jié)構(gòu),如果不依賴(lài)HDmap的道路結(jié)構(gòu)化信息,那么主車(chē)只能選擇直行,并通過(guò)camera不斷探查路口的道路結(jié)構(gòu)。這上圖11這個(gè)具體的場(chǎng)景下,主車(chē)是要穿越路口直行,但他所在的目前這根車(chē)道在路口布局中是公共汽車(chē)專(zhuān)用車(chē)道(路口為紅色)。但顯然在這個(gè)距離上,主車(chē)并未意識(shí)到這一點(diǎn),依然選擇直行。
在抵近路口的過(guò)程中,主車(chē)FSD beta開(kāi)始觀察到紅色路面,訓(xùn)練的結(jié)果令它意識(shí)到這是公共汽車(chē)專(zhuān)用道,但與此同時(shí),左側(cè)的直行車(chē)道分割線進(jìn)入實(shí)線狀態(tài)。這意味著向左的變道行為已經(jīng)不被交通規(guī)則所支持,所以車(chē)輛的規(guī)劃模塊輸出開(kāi)始搖擺指向右側(cè)車(chē)道。但同樣很快他發(fā)現(xiàn)地面的指示表示顯示右側(cè)車(chē)道是一根右轉(zhuǎn)車(chē)道。FSD beta開(kāi)始輸出搖擺不定的路徑規(guī)劃結(jié)果……直到人類(lèi)司機(jī)接管。
根據(jù)這個(gè)現(xiàn)象,我們可以推測(cè),如果FSD beta仰仗HDmap先驗(yàn)信息,那么我們不應(yīng)該看到這個(gè)現(xiàn)象:隨著逐步接近路口,路徑規(guī)劃模塊開(kāi)始搖擺不定。依賴(lài)HD map的好處很多,包括讓FSD beta在足夠安全的距離上就可以執(zhí)行左側(cè)換道,正常通行。但依賴(lài)HDmap同樣會(huì)降低自動(dòng)駕駛系統(tǒng)的整體魯棒性,在沒(méi)有HDmap的區(qū)域(或者HDmpa未及時(shí)更新的區(qū)域)行駛,則意味著自動(dòng)化水平的嚴(yán)重降級(jí)。
所以有人選擇全力建設(shè)盡可能廣泛和即時(shí)的HDmap覆蓋,有人選擇干脆不依賴(lài)HDmap尤其在路口區(qū)域,執(zhí)行即時(shí)測(cè)繪……這就看各家的系統(tǒng)設(shè)計(jì)思路了。
以上觀察也符合release note中的第三點(diǎn):-3 ?Improved right-of-wayunderstanding if the map is inaccurate or the car cannot follow the navigation。? In particular, modelingintersection extents is now entirely based on network predictions and no longeruses map-based heuristics.//小編:改善主車(chē)對(duì)于道路結(jié)構(gòu)識(shí)別的即時(shí)性,在高精地圖數(shù)據(jù)失效而無(wú)法利用時(shí),以主車(chē)識(shí)別結(jié)果為準(zhǔn)。在道路路口場(chǎng)景下,完全依賴(lài)主車(chē)的即時(shí)識(shí)別結(jié)果;
此處另一個(gè)值得關(guān)注的問(wèn)題是圖11所顯示的芝加哥鬧市區(qū),嚴(yán)重的城市峽谷可能會(huì)產(chǎn)生不穩(wěn)定的GPS定位效果。這個(gè)必然會(huì)在路徑導(dǎo)航(注意,不是路徑規(guī)劃層面)上產(chǎn)生干擾。我們觀察到FSD beta也有這個(gè)問(wèn)題,會(huì)在特定節(jié)點(diǎn)突然重啟路徑路由,大概率是因?yàn)镚PS信號(hào)偏差嚴(yán)重所誘發(fā)。
對(duì)于FSDbeta v10.11.2一個(gè)公允的評(píng)價(jià)
FSD beta進(jìn)入v10之后,大版本迭代的節(jié)奏慢了下來(lái)。V10階段已經(jīng)推送了11個(gè)小版本,但Elon Musk所多次提到的v11仍未到來(lái)。我們等到的是3月份Karpathy的停職休假。雖然不太可能是離職前奏,但在關(guān)鍵時(shí)刻,作為感知系統(tǒng)總監(jiān),去休一個(gè)三四個(gè)月的長(zhǎng)假……還是挺令人意外的。引發(fā)小編最大的思考還是這個(gè)問(wèn)題,對(duì)于FSD beta來(lái)說(shuō),過(guò)于嚴(yán)苛的單一傳感器配置,是否在感知層面引發(fā)難以克服的技術(shù)瓶頸期?而Ashok又能在這個(gè)感知結(jié)果下,帶領(lǐng)規(guī)劃和控制團(tuán)隊(duì)走多遠(yuǎn)呢?
也許現(xiàn)階段,能讓人暫時(shí)保持信心的,就是FSD beta高度數(shù)字量化的release note了!Tesla落在實(shí)處的硅步,一直都還在。
審核編輯:劉清













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論