伺服電機對拖測功機是一種廣泛應用于工業(yè)領域的測試設備,它主要用于測量電機的性能參數(shù),如功率、轉(zhuǎn)速、扭矩等。本文將對伺服電機對拖測功機的工作原理、應用領域、優(yōu)缺點等方面進行詳細闡述,以期為讀者提供全面
2024-03-21 15:22:49 90
90 
轉(zhuǎn)矩模式下如何控制電機速度 在轉(zhuǎn)矩模式下,控制電機速度的基本原理是將轉(zhuǎn)矩需求轉(zhuǎn)換為相應的電流輸出,通過控制電機的電流來實現(xiàn)轉(zhuǎn)速控制。以下是一般的步驟和方法: 1. 設定轉(zhuǎn)矩需求:根據(jù)應用需求,設定
2024-02-21 17:53:35451 交流伺服電機是一種通過閉環(huán)反饋控制系統(tǒng)實現(xiàn)精確位置、速度和轉(zhuǎn)矩控制的電機。它在工業(yè)自動化、機械加工、機器人領域有著廣泛的應用。本文將詳細介紹交流伺服電機的工作原理和控制方式。 一、交流伺服電機
2024-02-18 14:59:25268 和運動控制的領域,如數(shù)控機床、機器人、自動化生產(chǎn)線等。 伺服電機的工作原理可以簡單總結(jié)為以下幾個步驟: 接收指令信號:控制器接收來自外部設備(如PLC)的指令信號,指令信號包含了期望的運動狀態(tài),如位置和速度。 反
2024-02-04 10:10:45247 伺服電機原理與應用 一、伺服電機原理 伺服電機是一種控制系統(tǒng),通過傳感器接受反饋信號,將輸出信號與輸入信號進行比較,并通過控制器對輸出信號進行調(diào)整,以實現(xiàn)精確控制電機運動的位置、速度和力矩。伺服電機
2024-01-22 16:32:26281 伺服電機是一種特殊的電機,可以根據(jù)控制信號準確地控制角度、速度和位置。伺服電機的最簡單控制方法可以分為開環(huán)控制和閉環(huán)控制兩種。 開環(huán)控制:開環(huán)控制是指通過直接提供控制信號,使伺服電機旋轉(zhuǎn)到所設
2024-01-14 14:40:27569 三菱伺服電機的轉(zhuǎn)矩極限值調(diào)節(jié)對于實現(xiàn)電機的最佳性能和保護電機的安全運行至關重要。調(diào)節(jié)轉(zhuǎn)矩極限值可以根據(jù)具體的應用需求來優(yōu)化伺服系統(tǒng)的性能。本文將從以下幾個方面進行詳細介紹:首先是調(diào)節(jié)轉(zhuǎn)矩極限值的背景
2023-12-28 17:47:09722 請問大家,電機轉(zhuǎn)矩等級是什么意思呢?怎么恒量它。
2023-12-27 07:02:00
什么是伺服電機的原點設置?伺服電機零點和原點的區(qū)別 伺服電機的原點設置,簡單來說,就是確定電機的起始位置或參考位置。在使用伺服電機控制系統(tǒng)時,需要將電機的位置與設定的參考位置進行對齊,以確保精準
2023-12-25 13:57:591129 電機槽滿率和銅滿率區(qū)別,有什么關系? 電機槽滿率和銅滿率是電機設計和制造中兩個相關但又具有不同含義的重要參數(shù)。在電機設計和制造過程中,這兩個參數(shù)的選擇和優(yōu)化對電機性能和效率起著至關重要的作用。本文
2023-12-25 11:47:17406 伺服電機選型的標準是看電流還是轉(zhuǎn)矩?
現(xiàn)有一臺伺服電機:I0=10A,M0=9NM,Nn=3000rpm.
如果將其改為西門子1FK7伺服電機,選擇型號是:1fk7063-5af71-1ta0
是否可行,請指教!謝謝!
2023-12-25 06:06:52
伺服電機中的剛性是什么意思 伺服電機剛性過大導致什么后果? 伺服電機中的剛性是指電機對外部擾動的抵抗能力。它是衡量伺服電機控制性能優(yōu)劣的重要指標之一。 剛性越高,電機對外部擾動的響應能力越強
2023-12-20 17:36:553046 是正弦波控制,轉(zhuǎn)矩脈動小。直流伺服是梯形波。但直流伺服比較簡單,便宜。伺服電機可以實現(xiàn)精確控制,你讓它轉(zhuǎn)多少它就轉(zhuǎn)多少,而且它還會反饋,實現(xiàn)所謂的閉環(huán),由編碼器去反饋看是否確實轉(zhuǎn)了那么多,這樣控制精度就更高。 我們知道步進電機
2023-12-20 16:37:35338 伺服電機是一種高性能、高精度的電機,廣泛應用于自動化控制系統(tǒng)中。要實現(xiàn)伺服電機的正常工作,就需要將其連接到適當?shù)尿?qū)動器上。下面,將介紹伺服電機與驅(qū)動器的連接方法。 一、接線準備 確定伺服電機和驅(qū)動器
2023-12-20 09:47:321048 像我們的普通的變頻電機,在50HZ以下都是恒轉(zhuǎn)矩調(diào)速,哪位老師知道,可不可以通過設置變頻器的哪些參數(shù),來稍微提高以下50HZ以下的轉(zhuǎn)矩。
2023-12-13 08:58:47
請問勵磁電流與轉(zhuǎn)矩電流的概念是???之間有什么關系,對電機有什么影響啊
2023-12-13 07:29:21
交流電機的堵轉(zhuǎn)轉(zhuǎn)矩是否為電機的轉(zhuǎn)矩極限,此時,電機輸出功率如何計算,是否為電機最大功率
2023-12-12 07:17:20
步進電機的轉(zhuǎn)速和轉(zhuǎn)矩是什么關系?轉(zhuǎn)速高低對轉(zhuǎn)矩的影響?
2023-12-12 07:00:21
的特點,被廣泛應用于各種自動化控制系統(tǒng)中。 在交流伺服電機中,轉(zhuǎn)子的轉(zhuǎn)動慣量、最大轉(zhuǎn)矩和響應時間等參數(shù)可以根據(jù)實際需要進行調(diào)整,以滿足不同系統(tǒng)的需求。同時,交流伺服電機的控制方式也多種多樣,可以通過控制器進行
2023-12-11 17:20:09430 是正弦波控制,轉(zhuǎn)矩脈動小。直流伺服是梯形波。但直流伺服比較簡單,便宜。伺服電機可以實現(xiàn)精確控制,你讓它轉(zhuǎn)多少它就轉(zhuǎn)多少,而且它還會反饋,實現(xiàn)所謂的閉環(huán),由編碼器去反饋看是否確實轉(zhuǎn)了那么多,這樣控制精度就更高。 我們知道步進電機
2023-12-11 17:14:52230 請教一下:
電機“最高允許溫度”與“繞組溫升限值”和“性能參考溫度”是什么關系呢??
2023-12-11 07:09:24
請問大俠們,伺服電機的 “堵轉(zhuǎn)轉(zhuǎn)矩”是什么意思,是最大轉(zhuǎn)矩的意思么?我選型的時候是根據(jù) “額定轉(zhuǎn)矩”還是“堵轉(zhuǎn)轉(zhuǎn)矩”來選呢?然后 電機的 “靜態(tài)電流”是什么意思?說要根據(jù) 電機 的“靜態(tài)電流”來選擇電機模塊,如何解釋啊?
2023-12-11 07:01:07
、詳實且細致的比較分析。 一、設計原理: 變頻電機采用了變頻器進行控制,通過改變電源頻率和電壓來實現(xiàn)控制電機的轉(zhuǎn)速。而伺服電機則需要配備伺服系統(tǒng),通過傳感器和反饋回路來控制電機的位置和速度。 二、控制方式: 變頻電機
2023-12-08 10:47:38747 伺服電機選型是在設計或選擇機械設備時,根據(jù)工作需求和性能參數(shù)來確定適合的伺服電機。伺服電機是一種特殊類型的電機,具有高精度控制和反饋系統(tǒng),廣泛應用于機械、自動化和機器人領域。 伺服電機選型計算
2023-12-01 16:20:16561 電機的極數(shù)是指電機內(nèi)部磁極或繞組的數(shù)量。它直接決定了電機的轉(zhuǎn)速、轉(zhuǎn)矩、效率等關鍵性能參數(shù)。這是因為電機的極數(shù)會影響電機的輸出功率和轉(zhuǎn)速。
2023-11-27 10:14:32537 主體、控制器和電源三個部分組成。其中,電機主體包括定子和轉(zhuǎn)子,定子通常由鐵芯和線圈組成,轉(zhuǎn)子則包括轉(zhuǎn)軸和電機編碼器。 伺服電機是一種自動化系統(tǒng)中的執(zhí)行元件,它能夠?qū)⑤斎氲碾娦盘栟D(zhuǎn)換為機械轉(zhuǎn)矩輸出。伺服電機主要包括電機
2023-11-24 14:17:482543 羅克韋爾AB伺服電機抖動故障分析
2023-11-23 15:55:19411 ,但是加上閉環(huán)控制系統(tǒng)就可以稱之為伺服系統(tǒng)中的電機。 伺服電機是在伺服系統(tǒng)中控制機械元件運轉(zhuǎn)的電動機,它搭配上驅(qū)動器,形成一個完整的伺服系統(tǒng),就能夠精準地控制速度、位置等。伺服電機具有線性度高、起動轉(zhuǎn)矩大、運行范
2023-11-16 16:13:33284 伺服電機可以控制速度,位置精度非常準確,可以將電壓信號轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動控制對象。伺服電機轉(zhuǎn)子轉(zhuǎn)速受輸入信號控制,并能快速反應,在自動控制系統(tǒng)中,用作執(zhí)行元件,且具有機電時間常數(shù)小、線性度高等
2023-11-08 18:20:201253 近年來,受益于伺服電機下游廣泛的應用范圍,全球范圍內(nèi)伺服電機行業(yè)市場需求正在穩(wěn)步增長。隨著伺服電機需求的增長,特別是工業(yè)機器人對于伺服電機需求的不斷擴大,全球伺服電機行業(yè)的市場規(guī)模在穩(wěn)步增大
2023-11-01 08:07:32932 
伺服電機是指在伺服系統(tǒng)中控制機械元件運轉(zhuǎn)的發(fā)動機,是一種補助馬達間接變速裝置。伺服電機可以控制速度,位置精度非常準確,可以將電壓信號轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動控制對象。
2023-10-24 11:28:14144 
無刷電機和傳統(tǒng)的有刷電機的構(gòu)造差異非常大。無刷電機的轉(zhuǎn)子上沒有傳統(tǒng)的碳刷子,在轉(zhuǎn)子上有固定的電子元件,比如霍爾元件、傳感器等,這些元件可以感受電極磁極位置,并調(diào)整電機的電流和電壓,從而實現(xiàn)電機的控制。伺服電機中,也有類似的元件用于調(diào)整電機的轉(zhuǎn)速和轉(zhuǎn)矩。
2023-10-15 09:16:38454 伺服電機可使控制速度、位置精度非常準確,可以將電壓信號轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動控制對象。伺服電機轉(zhuǎn)子轉(zhuǎn)速受輸入信號控制,并能反應,在自動控制系統(tǒng)中,用作執(zhí)行元件,且具有機電時間常數(shù)小、線性
2023-10-10 09:37:10988 伺服電機可使控制速度、位置精度非常準確,可以將電壓信號轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動控制對象。伺服電機轉(zhuǎn)子轉(zhuǎn)速受輸入信號控制,并能反應,在自動控制系統(tǒng)中,用作執(zhí)行元件,且具有機電時間常數(shù)小、線性度高、始動電壓等特性。
2023-10-09 11:20:12559 在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的控制伺服,其實就是對伺服電機的位置控制。其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應用比較少而已。
2023-09-08 11:22:48734 直流伺服電機分為有刷和無刷電機。有刷電機成本低,結(jié)構(gòu)簡單,啟動轉(zhuǎn)矩大,調(diào)速范圍寬,控制容易,需要維護,但維護方便(換碳刷),產(chǎn)生電磁干擾,對環(huán)境有要求。因此它可以用于對成本敏感的普通工業(yè)和民用場合。
2023-09-07 11:14:17377 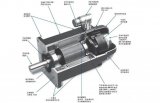
BLDC電機作為伺服電機的優(yōu)勢包括:
1. 高轉(zhuǎn)矩密度:BLDC電機具有高效率和高功率密度,可以在較小的尺寸和負載要求下提供較大的轉(zhuǎn)矩輸出。
2. 高速控制響應:BLDC電機具有較低
2023-09-06 16:14:021592 當需要較高的間歇功率密度值時,工程師通常不希望使用傳統(tǒng)的均方根(RMS)計算,轉(zhuǎn)速-轉(zhuǎn)矩性能曲線就成為了挑選伺服電機和驅(qū)動器的標準方法。但這樣做可能會導致電機或驅(qū)動器容量不足。對于大多數(shù)伺服應用來
2023-09-06 08:08:52570 ? ?齒槽轉(zhuǎn)矩是永磁電機繞組不通電時永磁體與定子鐵心之間相互作用產(chǎn)生的轉(zhuǎn)矩,是永磁體與定子齒之間相互作用力的切向分量的脈動引起的。當電機轉(zhuǎn)子旋轉(zhuǎn)時,永磁體兩側(cè)面對應定子齒槽的一小段范圍內(nèi)磁導發(fā)生較大
2023-08-30 09:18:541976 
什么是伺服電機?伺服是一種電磁裝置,利用負反饋機制將電信號轉(zhuǎn)換為受控運動。基本上,伺服系統(tǒng)的行為類似于執(zhí)行器,提供對速度、加速度和線性或角度位置的精確控制。它由四件事組成:直流電機、位置傳感器、齒輪
2023-08-30 08:08:521675 伺服電機的控制方式比異步電機更為復雜。伺服電機需要一個控制器來監(jiān)視電機狀態(tài)并做出相應的調(diào)整,這需要一定的技術(shù)和經(jīng)驗。而異步電機的控制方式更為簡單,只需要通過變頻器等設備對其進行調(diào)速即可。
2023-08-26 11:12:322034 伺服電機是一種常用于控制精度要求較高的機械設備的電機。它通過精密的控制裝置來保持輸出轉(zhuǎn)矩或轉(zhuǎn)速的穩(wěn)定性,實現(xiàn)高精度的運動控制。伺服電機內(nèi)部包含了控制器、編碼器、功率放大器和電機等幾個主要組成部分,它們協(xié)同工作來實現(xiàn)控制。
2023-08-26 11:11:272497 在位置模式控制中,伺服電機通過傳感器獲取自身位置信息和目標位置信息,然后計算出兩者之間的差值,進而控制電機輸出的電流、電壓、轉(zhuǎn)矩或速度,實現(xiàn)電機的精準旋轉(zhuǎn)。在該模式下,伺服電機的準確度非常高,可以在微小的角度范圍內(nèi)進行控制。
2023-08-26 11:07:134517 無刷電機和傳統(tǒng)的有刷電機的構(gòu)造差異非常大。無刷電機的轉(zhuǎn)子上沒有傳統(tǒng)的碳刷子,在轉(zhuǎn)子上有固定的電子元件,比如霍爾元件、傳感器等,這些元件可以感受電極磁極位置,并調(diào)整電機的電流和電壓,從而實現(xiàn)電機的控制。伺服電機中,也有類似的元件用于調(diào)整電機的轉(zhuǎn)速和轉(zhuǎn)矩。
2023-08-26 10:48:441638 隨著科技的飛速發(fā)展,制造業(yè)正經(jīng)歷著一場數(shù)字化和智能化的革命。在這個過程中,伺服電機作為一種關鍵的運動控制裝置,與機床之間建立了緊密的關系。
2023-08-25 17:49:20733 在許多領域都需要各種電機,包括知名的步進電機和伺服電機。但是,對于許多用戶而言,他們不了解這兩種電機的主要區(qū)別,因此他們始終不知道如何選擇。那么,步進電機和伺服電機之間的主要區(qū)別是什么?基本結(jié)構(gòu)
2023-08-22 08:08:474038 在許多領域都需要各種電機,包括知名的步進電機和伺服電機。但是,對于許多用戶而言,他們不了解這兩種電機的主要區(qū)別,因此他們始終不知道如何選擇。那么,步進電機和伺服電機之間的主要區(qū)別是什么?
2023-08-21 10:14:151711 
在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的控制伺服,其實就是對伺服電機的位置控制。其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應用比較少而已。
2023-08-09 09:25:28599 的周期、更高的生產(chǎn)率、更好的可靠性和更長的壽命。為了實現(xiàn)伺服電機的更好性能,就必須對伺服電機的一些使用特點有所了解。問題一:噪聲,不穩(wěn)定客戶在一些機械上使用伺服電機
2023-08-03 08:09:33499 供應:使用不穩(wěn)定或不符合規(guī)格要求的電源供應給伺服電機,可能導致電機性能下降、振動增加或甚至損壞電機。應使用符合規(guī)格的穩(wěn)定電源,并遵循制造商提供的電源要求。 (3)忽略環(huán)境條件:將伺服電機安裝在惡劣的環(huán)境條件下,如
2023-08-01 08:10:02250 行星減速機和伺服電機是目前廣泛應用于工業(yè)領域的機械裝置。它們在實現(xiàn)機械傳動和控制方面起著重要的作用。然而,盡管它們都有著類似的功能,但行星減速機和伺服電機之間存在一些顯著的區(qū)別。本文將通過詳細的論述
2023-08-01 00:06:52527 伺服電機速度控制和轉(zhuǎn)矩控制都是用模擬量來控制,位置控制是通過發(fā)脈沖來控制。具體采用什么控制方式要根據(jù)客戶的要求以及滿足何種運動功能來選擇。
2023-07-28 14:36:19574 
電機的重量和性能之間存在著一定的關系,但并不是絕對關系。電機的性能取決于多種因素,包括電機的設計、材料、加工工藝、控制系統(tǒng)等等。而電機的重量則主要受到電機的規(guī)格、型號、功率等因素的影響。
2023-07-23 15:41:57607 電機轉(zhuǎn)矩分為電磁轉(zhuǎn)矩和磁阻轉(zhuǎn)矩。本期,從能量的角度來聊聊什么是電磁轉(zhuǎn)矩和磁阻轉(zhuǎn)矩,盡量讓大家不通過死記硬背學知識。
2023-07-14 17:31:281095 
步進電機和伺服電機的性能差異源自他們不同的電機設計方案。步進電機的極數(shù)比伺服電機多得多,因此步進電機旋轉(zhuǎn)一整圈,所需的繞組電流交換次數(shù)要多得多,從而導致在速度增加的情況下,其轉(zhuǎn)矩迅速下降。
2023-07-13 10:53:45749 
在直流電機,伺服電機和步進電機之間進行選擇是一項艱巨的任務,包括在眾多設計因素之間取得平衡,即成本,速度,轉(zhuǎn)矩,加速度以及驅(qū)動電路,在選擇最佳方案時都起著至關重要的作用。您的應用的電動機。
2023-07-09 16:22:081800 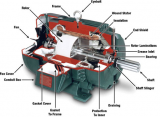
使機械元件轉(zhuǎn)動的力矩稱為轉(zhuǎn)動力矩,簡稱轉(zhuǎn)矩。機械元件在轉(zhuǎn)矩作用下都會產(chǎn)生一定程度的扭轉(zhuǎn)變形,故轉(zhuǎn)矩有時又稱為扭矩。
2023-07-02 14:20:276159 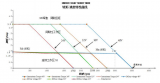
電子發(fā)燒友網(wǎng)站提供《用Arduino控制伺服電機的超級簡單方法.zip》資料免費下載
2023-06-28 09:51:15 0
0 ABB?通過提供 E530?伺服驅(qū)動器和 DSM?伺服電機的產(chǎn)品組合,提供整體伺服系統(tǒng)解決方案。E530?伺服驅(qū)動器是一款通用型伺服驅(qū)動器,其工作電壓為交流單 /三相 200 V ~ 240
2023-06-27 10:41:34440 
伺服電機在各行各業(yè)的應用需求越來越廣泛,伺服電機在產(chǎn)品研發(fā)及出廠檢測必須確保產(chǎn)品性能及產(chǎn)品質(zhì)量,因此對電機的性能進行嚴格的測試與分析顯得尤為重要。伺服電機測試系統(tǒng)根據(jù)國標GB
2023-06-26 11:33:061825 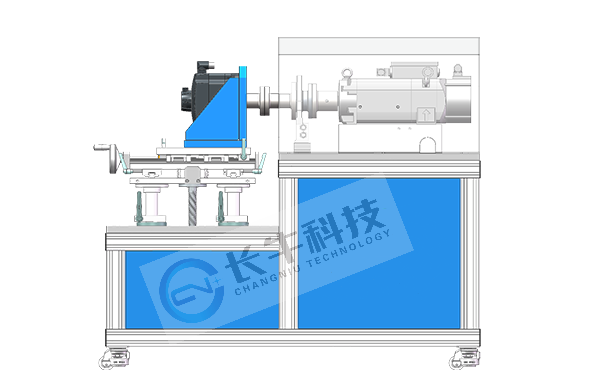
電動伺服系統(tǒng)的一般結(jié)構(gòu)為三個閉環(huán)控制,即電流環(huán)、速度環(huán)和位置環(huán)。一般情況下,對于交流伺服驅(qū)動器,可通過對其內(nèi)部功能參數(shù)進行人工設定而實現(xiàn)位置控制、速度控制、轉(zhuǎn)矩控制等多種功能。那么關于伺服電機有哪些需要知道的呢?
2023-06-26 10:13:17325 pwm占空比會影響步進電機的轉(zhuǎn)矩嗎?
2023-06-25 07:13:27
伺服電機是一種可以精確控制角度方向的電子設備。當涉及到以精確角度移動或旋轉(zhuǎn)物體時,伺服電機是此類應用的最佳選擇。它由一個簡單的直流電機和位置反饋系統(tǒng)組成,用于確定電機位置。我們將使用可以360o旋轉(zhuǎn)
2023-06-18 09:58:21406 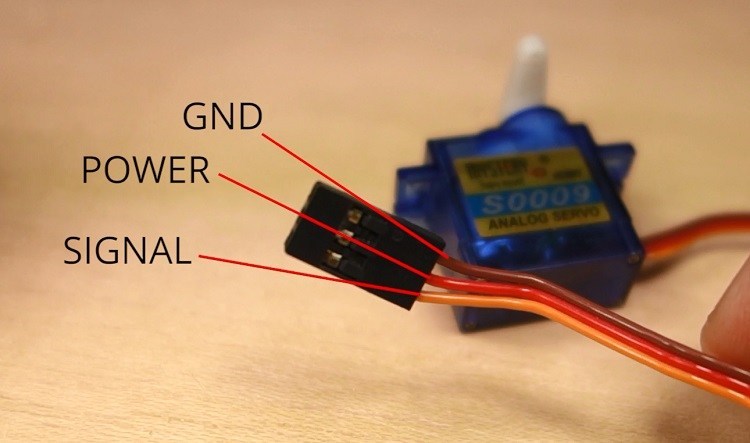
抓取機器人需要對物體進行高精度、高速度的抓取和放置,因此需要使用高性能的伺服電機來實現(xiàn)精準的運動控制。相比于其他類型的電機,伺服電機具有以下優(yōu)點,適合應用于抓取機器人中: 1、伺服電機可以實現(xiàn)高精度
2023-06-15 09:15:02377 電機參數(shù)不匹配:電機的參數(shù)包括電阻、電感、永磁體磁場等,在電機設計和制造時需要保證這些參數(shù)的準確性和匹配性。如果電機參數(shù)設置不合理或不匹配,會導致電機轉(zhuǎn)矩超過預計范圍。
2023-06-10 10:37:006779 有哪些需要知道的呢?1.如何正確選擇伺服電機和步進電機?主要視具體應用情況而定,簡單地說要確定:負載的性質(zhì)(如水平還是垂直負載等),轉(zhuǎn)矩、慣量、轉(zhuǎn)速、精度、加減速等要求
2023-06-08 09:50:21641 選擇伺服電機和步進電機?主要視具體應用情況而定,簡單地說要確定:負載的性質(zhì)(如水平還是垂直負載等),轉(zhuǎn)矩、慣量、轉(zhuǎn)速、精度、加減速等要求,上位控制要求(如對端口界
2023-05-31 09:35:29316 伺服電機速度控制和轉(zhuǎn)矩控制都是用模擬量來控制,位置控制是通過發(fā)脈沖來控制。
2023-05-24 09:44:00635 
我們在選擇伺服電機的時候,最關心的參數(shù)便是額定轉(zhuǎn)速以及額定轉(zhuǎn)矩。那么,它們之間的關系是怎么的呢?它們之間如何進行換算呢?簡單說一下。 先說關系,電機的轉(zhuǎn)速與轉(zhuǎn)矩是成反比例關系的,轉(zhuǎn)速越高,轉(zhuǎn)矩越小
2023-05-20 12:55:013792 一、什么是伺服電機?伺服電機是一種可以通過控制器精確地控制位置、速度和加速度的電機,主要由電機、編碼器和控制器三部分組成,具有高轉(zhuǎn)矩、高精度、快速響應和低轉(zhuǎn)速穩(wěn)定特性,能夠在負載擾動、電壓變化及機械
2023-05-12 11:30:06624 
磁鋼作為電機的關鍵組成部分,影響著電機的性能。磁鋼的厚度會影響到電機的磁通密度、磁通量和磁阻等因素,從而影響到電機的轉(zhuǎn)矩、效率、輸出功率等性能參數(shù)。
2023-05-09 09:53:15979 
大多數(shù)情況下,直流電機控制的控制方法都是非常簡單的(只需要連接電源和地)。伺服電機有一些不同,它使用3根線連接
(電源、地和信號)將電機移動到某個旋轉(zhuǎn)位置。該位置由信號線上發(fā)送的信號決定。一旦電機
2023-05-06 10:15:000 伺服電機中,位置傳感器通常是簡單的電位器。這些設備捕獲的實際位置被反饋到誤差檢測器,并與目標位置進行比 較。然后控制器根據(jù)誤差修正電機的實際位置,使其與目標位置相匹配。
2023-05-06 10:08:212 手上有一個伺服電機(松下MHMF042L1U2M),一個電機驅(qū)動器(松下MBDLT25SF200V)。如下圖:驅(qū)動器介紹:驅(qū)動器組成部分 驅(qū)動器命名電機介紹:電機組成部分 電機命名 硬件分析:電機
2023-05-05 11:36:140 伺服電機十大故障分析
2023-04-28 09:35:19626 在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的伺服控制,其實就是對伺服電機的位置控制。 其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應用比較少而已。
2023-04-27 17:34:351113 
交流伺服電機的性能要好一些,因為交流伺服是正弦波控制,轉(zhuǎn)矩脈動小;而無刷直流伺服是梯形波控制。但無刷直流伺服實現(xiàn)控制比較簡單,便宜。
2023-04-26 10:27:00832 ,最大功率可達5KW。集可編程運動控制、PLC、伺服驅(qū)動功能于一體。主要應用于直線(DDL)、力矩(DDR)、音圈、有刷、無刷伺服電機的位置、速度、轉(zhuǎn)矩控制。它能以
2023-04-20 10:21:24
伺服電機的位置、速度、轉(zhuǎn)矩,大大的降低了EtherCAT/CANopen 總線多軸系統(tǒng)中每一個節(jié)點的成本。RDM驅(qū)動模塊作為一個EtherCAT/CANopen從站
2023-04-19 15:39:40
總線控制伺服電機的位置、速度、轉(zhuǎn)矩,大大的降低了EtherCAT/CANopen 總線多軸系統(tǒng)中每一個節(jié)點的成本。RDM驅(qū)動模塊作為一個EtherCAT/CAN
2023-04-17 18:13:06
日本電產(chǎn)三協(xié)株式會社推出了可支持AC伺服電機的AC伺服放大器“S-FLAGⅡ”系列產(chǎn)品,今天AMEYA360將繼續(xù)為大家進行介紹! ? “S-FLAGⅡ” AC伺服放大器 特征 速度響應頻率
2023-04-12 13:52:09203 
對于同一種類型的電機,不同的規(guī)格和型號會有不同的重量和性能。比如同為異步電機,功率相同的電機,其重量和性能也會有所差別。因此,電機的性能和重量之間的關系并不是絕對的,需要具體分析具體情況。
2023-04-10 10:23:111010 磁鋼作為電機的關鍵組成部分,影響著電機的性能。磁鋼的厚度會影響到電機的磁通密度、磁通量和磁阻等因素,從而影響到電機的轉(zhuǎn)矩、效率、輸出功率等性能參數(shù)。
2023-04-07 09:24:021518 伺服電機泛指各種帶有編碼器結(jié)構(gòu),可以進行運動狀態(tài)反饋的電機系統(tǒng)。我們在進行伺服電機選型時,最關注的無外乎電機的轉(zhuǎn)速轉(zhuǎn)矩以及位移精度等等。當然,電機的可靠性穩(wěn)定性也是十分重要的。電機的轉(zhuǎn)矩越大,說明
2023-04-07 07:10:04993 伺服電動機分為直流伺服電機和交流伺服電機。直流伺服電機比較便宜,交流伺服電機比較常用。
2023-04-04 15:05:451421 日本電產(chǎn)三協(xié)株式會社推出了可支持AC伺服電機的AC伺服放大器“S-FLAGⅡ”系列產(chǎn)品。
2023-03-29 14:41:44490 
導讀:本期對異步電機直接轉(zhuǎn)矩控制(Direct Torque Control, DTC)進行建模分析,以最簡單的單矢量直接轉(zhuǎn)矩控制為例。后期會進一步整理DTC的改進方案,比如引入SVM、占空比優(yōu)化
2023-03-29 11:46:421 電磁轉(zhuǎn)矩是電機的一個重要指標,電磁轉(zhuǎn)矩的準確計算也會影響一臺電機的性能。最常用的兩種方法就是麥克斯韋應力張量法和磁通法。這兩種方法都基于有限元計算,有限元分析軟件功能比較強大,可以通過節(jié)點磁位很容易計算電磁轉(zhuǎn)矩。
2023-03-28 14:30:586075 在理論分析中,電磁轉(zhuǎn)矩與電壓成正比例關系,即電磁轉(zhuǎn)矩隨著施加在電機定子上的電壓的增加而增大。這是由于電機定子上施加電壓后,電流的大小與定子電壓成正比例關系,而電磁轉(zhuǎn)矩與電流強度成正比例關系,因此電磁轉(zhuǎn)矩與電壓同步變化。
2023-03-28 14:26:222475 電磁轉(zhuǎn)矩是指在電動機中通過電流產(chǎn)生的磁場和磁場中的磁極相互作用形成的轉(zhuǎn)矩。它的大小取決于線圈中的電流和磁場的強度。而輸出轉(zhuǎn)矩則是指電機輸出的機械轉(zhuǎn)矩減去負載阻力和慣性等因素的影響后的實際轉(zhuǎn)矩。
2023-03-28 14:19:443345 電磁轉(zhuǎn)矩是指電動機中通過電流產(chǎn)生的磁場和磁場中的磁極相互作用形成的轉(zhuǎn)矩。它的大小取決于線圈中的電流和磁場的強度。而負載轉(zhuǎn)矩是指電動機輸出的機械轉(zhuǎn)矩減去負載阻力和慣性等因素的影響后的實際轉(zhuǎn)矩。
2023-03-28 14:13:115517 制動轉(zhuǎn)矩是阻礙電機啟動的轉(zhuǎn)矩,需要通過有效抑制發(fā)電制動轉(zhuǎn)矩和脈動轉(zhuǎn)矩,才能夠使電機起動能力得到顯著增強。電機極對數(shù)不同,制動轉(zhuǎn)矩也不同。
2023-03-27 14:56:174759 到現(xiàn)在已經(jīng)學習了步進電機的工作原理、結(jié)構(gòu),讀者一定關心步進電機的相數(shù)、轉(zhuǎn)子齒數(shù)與主極數(shù)之間有什么關系。設計步進電機時肯定要了解這些關系。對于使用步進電機的客戶,更重要的 是詳細了解步進電機的結(jié)構(gòu)
2023-03-23 14:15:300 步進電機和伺服電機哪個好,這個沒有絕對的答案,適合的才是最好的!下面從步進電機和伺服電機各種的優(yōu)缺點、性能特點
進行分析:
步進電機是一種感應電機,它的工作原理是利用電子電路,將直流電變成
2023-03-23 11:07:324
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論