伺服電機對拖測功機是一種廣泛應用于工業(yè)領域的測試設備,它主要用于測量電機的性能參數(shù),如功率、轉(zhuǎn)速、扭矩等。本文將對伺服電機對拖測功機的工作原理、應用領域、優(yōu)缺點等方面進行詳細闡述,以期為讀者提供全面
2024-03-21 15:22:49 90
90 
,它可以通過控制電流脈沖的數(shù)量和頻率來精確控制電機的旋轉(zhuǎn)角度和速度。 那么,步進伺服電機出現(xiàn)失步現(xiàn)象的原因有哪些呢? 1、電源問題:電源不穩(wěn)定或者電壓波動過大,步進伺服電機可能會受到干擾,都可能導致步進伺服電機出
2024-03-19 08:44:1824 
步進伺服電機出現(xiàn)失步現(xiàn)象的原因可能有多種,主要包括但不限于以下幾點
2024-03-18 11:02:04218 ??伺服電機作為現(xiàn)代工業(yè)自動化的核心組件,它的穩(wěn)定運行對于整個生產(chǎn)流程至關重要。但就像任何機器一樣,伺服電機也會遇到一些頭疼的問題。今天,就讓我來給大家科普一下伺服電機在工作中常見的問題以及相應
2024-03-16 08:42:0623 伺服電機是不是也可以改變“相序”來實現(xiàn)電機正反轉(zhuǎn)呢? 伺服電機是一種常見的電動執(zhí)行器,廣泛應用于工業(yè)自動化、機器人、CNC機床等領域。除了控制轉(zhuǎn)速和位置精度外,伺服電機還可以實現(xiàn)正反轉(zhuǎn)功能。反轉(zhuǎn)操作
2024-02-18 14:35:29539 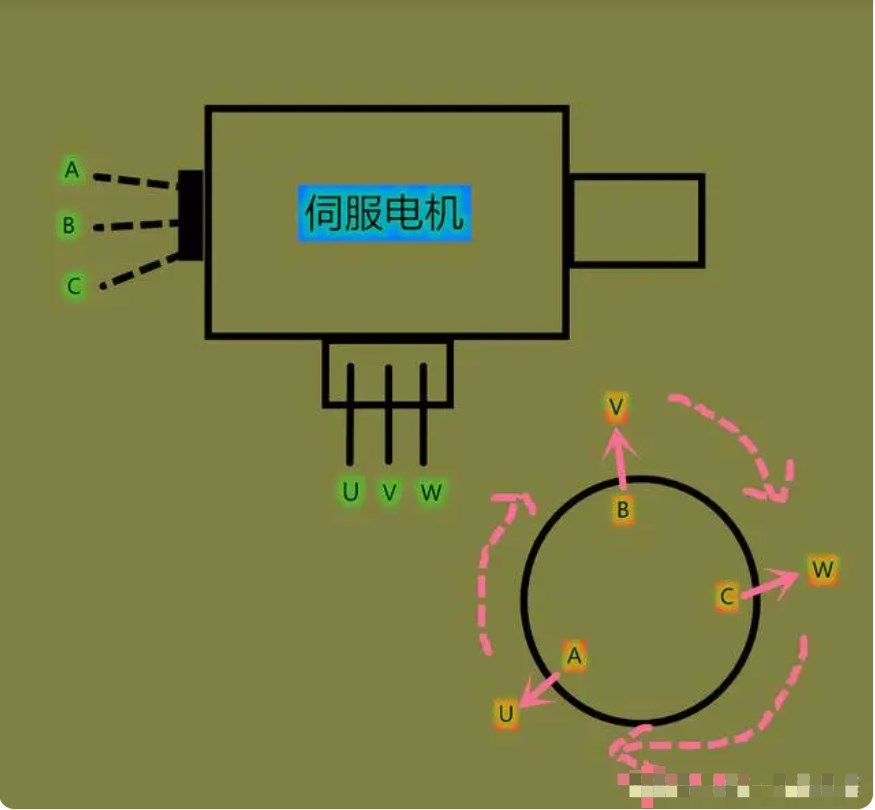
伺服電機的編碼器是用來測量電機轉(zhuǎn)動角度和速度的重要部件。然而,由于長時間運行、環(huán)境因素等原因,編碼器可能會出現(xiàn)故障,影響電機的準確運行。下面將介紹伺服電機編碼器的故障原因和維修方法,并介紹編碼器
2024-02-14 18:06:003213 伺服電機是一種通過反饋機制實現(xiàn)精確位置和速度控制的電機。伺服電機通常由電機、控制器和編碼器等組成。控制器接收來自編碼器的反饋信號,并根據(jù)指令信號調(diào)節(jié)電機的速度和位置。伺服電機廣泛應用于需要高精度定位
2024-02-04 10:10:45247 伺服電機是一種特殊的電機,能夠根據(jù)控制信號的反饋信息來調(diào)整輸出轉(zhuǎn)速和位置,具有較高的精度和響應速度,廣泛應用于機械控制系統(tǒng)中。本文將詳細介紹伺服電機的結(jié)構(gòu)和工作原理。 一、結(jié)構(gòu) 伺服電機主要由電機
2024-02-02 14:20:09318 伺服電機原理與應用 一、伺服電機原理 伺服電機是一種控制系統(tǒng),通過傳感器接受反饋信號,將輸出信號與輸入信號進行比較,并通過控制器對輸出信號進行調(diào)整,以實現(xiàn)精確控制電機運動的位置、速度和力矩。伺服電機
2024-01-22 16:32:26281 該伺服驅(qū)動器采用有2個相同的伺服電機驅(qū)動板,電機編碼器信號通過接口反饋給控制芯片。伺服電機控制信號通過光耦連接到后端伺服電機驅(qū)動芯片控制端。
2024-01-22 14:45:43292 
伺服電機和步進電機在控制精度、低頻特性、矩頻特性、過載能力、編碼器類型等方面存在顯著差異。
2024-01-16 10:27:42192 伺服電機和伺服電機驅(qū)動器是緊密相關的兩個部分,它們通常作為一個完整的系統(tǒng)來實現(xiàn)精確的運動控制。
2024-01-13 17:53:221243 觀點一 當伺服電機在零速時發(fā)生抖動,應該是增益設高了,可減小增益值。如果啟動時抖動一下即報警停車了,最大可能是電機相序不正確。 觀點二 a.PID增益調(diào)節(jié)過大的時候,容易引起電機抖動,特別是加上
2024-01-11 08:35:34141 
大家好,我碰到一個問題,西門子同步伺服電機1FT6102-8AZ71-ZAG1-Z啟動后抖動,控制部分是S120驅(qū)動器,找不到原因,想調(diào)整編碼器角度,但調(diào)試時P1990參數(shù)無法修改為1,不知什么原因,有哪位高手指點一下,萬分感激!
2024-01-10 07:58:19
S120驅(qū)動1FT7伺服電機帶絕對值編碼器走絕對位控,伺服電機靜動態(tài)優(yōu)化好后運行大概半年時間都很正常,最近運行時伺服電機偶爾出現(xiàn)3s左右噪聲,響聲很大,監(jiān)控曲線發(fā)現(xiàn)出現(xiàn)噪聲時扭矩波動很大。請大家?guī)兔Ψ治鱿率鞘裁?b class="flag-6" style="color: red">原因呢,謝謝!
2024-01-10 06:47:16
西門子伺服電機,西門子S120驅(qū)動。整個系統(tǒng)8個伺服電機。其中一個伺服電機是通過同步帶驅(qū)動平臺做直線往復運動,全程共三個定位點。運行N次后出現(xiàn)位置偏差,重新校正后定位是準確的,在運行一段時間后又
2024-01-09 07:55:37
伺服電機應用中常見干擾類型和產(chǎn)生途徑
2024-01-07 17:56:09843 的基本概念。低溫伺服電機是一種能夠在低溫環(huán)境下正常工作的伺服電機,它具有較高的精度和響應速度,適用于低溫環(huán)境下的精密控制。普通電機是一種常見的電動機,它廣泛應用于各種工業(yè)和民用領域。 接下來,我們來探討低溫伺服電機
2024-01-05 16:38:08209 在伺服電機系統(tǒng)中,通常會有兩個重要的參考位置,即伺服電機零點和原點。伺服電機零點是指電機的初始位置,也可以理解為初始零位或歸零位置。
2024-01-05 10:27:02576 在自動化設備中,經(jīng)常用到伺服電機,特別是方位操控,大部分品牌的伺服電機都有方位操控功用,經(jīng)過操控器發(fā)出脈沖來操控伺服電機運轉(zhuǎn),脈沖數(shù)對應轉(zhuǎn)的角度,脈沖頻率對應速度(與電子齒輪設定
2024-01-05 08:39:44222 單相減速電機經(jīng)常燒壞原因 單相減速電機經(jīng)常燒壞的原因是多種多樣的,下面我將詳細介紹其中一些常見的原因。 1. 過載:最常見的原因之一是電機運行時負載過重。電機的額定負載是其設計能夠承受的最大負載
2024-01-04 11:44:39425 有刷電機常見故障有哪些 有刷電機是一種常見的電動機類型,廣泛應用于各種電器和機械設備中。然而,由于長時間運行或其他原因,有刷電機也會出現(xiàn)一些常見故障。本文將詳細介紹有刷電機的常見故障及其原因,并提
2024-01-04 11:26:31550 當說"伺服電機燒了"時,通常指的是伺服電機發(fā)生了故障或損壞。這可能是由于多種原因導致的
2023-12-29 16:30:00813 電機的控制方式有多種,每一種都有自己的特點和應用范圍。在選擇伺服電機控制方式時,需要考慮多個因素,包括應用需求、成本效益、控制系統(tǒng)的復雜性和實施難度等。 一、位置控制方式 位置控制方式是最常見的伺服電機控制方式之
2023-12-26 14:02:19578 伺服電機飛車的原因? 伺服電機飛車是指電機在工作過程中出現(xiàn)突然加速或失控的現(xiàn)象,使機械設備無法正常工作或造成危險。 第一部分:引言 伺服電機是一種用于控制機械系統(tǒng)的電機。它通常使用反饋信號來控制電機
2023-12-25 13:58:011021 什么是伺服電機的原點設置?伺服電機零點和原點的區(qū)別 伺服電機的原點設置,簡單來說,就是確定電機的起始位置或參考位置。在使用伺服電機控制系統(tǒng)時,需要將電機的位置與設定的參考位置進行對齊,以確保精準
2023-12-25 13:57:591129 伺服電機速度增益的作用? 伺服電機速度增益是伺服控制系統(tǒng)中的一個重要參數(shù),它對于電機的運行速度和穩(wěn)定性起著關鍵作用。本文將詳盡、詳實、細致地介紹伺服電機速度增益的作用。 一、伺服電機的基本原理 伺服
2023-12-25 13:57:55554 伺服位置誤差大的原因及解決方法 伺服電機是一種精密控制裝置,可以實現(xiàn)高精度、高穩(wěn)定性的位置控制。然而,伺服電機在使用過程中常常出現(xiàn)定位誤差過大的問題。本文將從機械結(jié)構(gòu)、控制系統(tǒng)、環(huán)境因素、測量誤差
2023-12-25 13:57:521840 什么是過沖 過沖是指伺服電機在停止運轉(zhuǎn)之前,由于慣性等原因繼續(xù)運動超過設定的目標位置,導致機械系統(tǒng)或工作部件發(fā)生不受控制的運動。通常有兩種類型的過沖:正向過沖和負向過沖。正向過沖是指伺服電機的停止位置超過了目標位置,而負
2023-12-25 11:47:22309 伺服電機中的剛性是什么意思 伺服電機剛性過大導致什么后果? 伺服電機中的剛性是指電機對外部擾動的抵抗能力。它是衡量伺服電機控制性能優(yōu)劣的重要指標之一。 剛性越高,電機對外部擾動的響應能力越強
2023-12-20 17:36:553046 常見的齒輪失效有哪些形式?失效的原因是什么?可采用哪些措施來減緩失效的發(fā)生? 齒輪是機械傳動中常用的一種傳動方式,它能夠?qū)恿囊粋€軸傳遞到另一個軸上。然而,在長時間使用過程中,齒輪也會出現(xiàn)各種失效
2023-12-20 11:37:151050 伺服電機是一種高性能、高精度的電機,廣泛應用于自動化控制系統(tǒng)中。要實現(xiàn)伺服電機的正常工作,就需要將其連接到適當?shù)尿?qū)動器上。下面,將介紹伺服電機與驅(qū)動器的連接方法。 一、接線準備 確定伺服電機和驅(qū)動器
2023-12-20 09:47:321048 電機起動時,轉(zhuǎn)速慢的原因是多種多樣的。以下是一些可能導致電機起動轉(zhuǎn)速慢的原因: 1. 電源電壓低:電源電壓低于電機額定電壓,會導致電機起動時轉(zhuǎn)速慢。這可能是由于電網(wǎng)電壓波動或電源線路不穩(wěn)定
2023-12-15 08:59:46931 產(chǎn)生電機抖動原因是什么?有沒有對策呢?
2023-12-12 06:00:34
變頻電機和伺服電機的區(qū)別? 變頻電機和伺服電機是現(xiàn)代工業(yè)領域中常用的兩種電動機類型。雖然它們都可以實現(xiàn)電動機的運轉(zhuǎn),但在設計原理、控制方式以及應用范圍等方面存在許多區(qū)別。本文將從這些方面進行詳盡
2023-12-08 10:47:38747 伺服電機選型是在設計或選擇機械設備時,根據(jù)工作需求和性能參數(shù)來確定適合的伺服電機。伺服電機是一種特殊類型的電機,具有高精度控制和反饋系統(tǒng),廣泛應用于機械、自動化和機器人領域。 伺服電機選型計算
2023-12-01 16:20:16561 伺服電機常見故障維修及注意事項
2023-11-28 13:29:36857 DD馬達和伺服電機是兩種常見的電機類型,它們在許多方面都有所不同。下面將詳細介紹它們的區(qū)別。 一、定義和結(jié)構(gòu) DD馬達,全稱為DD馬達驅(qū)動器,是一種通過控制器來實現(xiàn)直流電機正反轉(zhuǎn)的設備。它主要由電機
2023-11-24 14:17:482543 發(fā)那科伺服電機維修技巧
2023-11-23 10:58:20860 伺服電機 “伺服”一詞是來源于希臘語“奴隸”的意思,那么伺服電機也可以理解為絕對服從控制信號指揮電機,所以伺服電機是指在伺服系統(tǒng)中被控制的電機。 如果單指一個電機的話,那只能算一個被控的機械元件
2023-11-16 16:13:33284 伺服電機異響可能是哪方面的原因?
2023-11-15 07:02:34
要準確地定義伺服電機,我們首先需理解其核心特性:反饋與閉環(huán)控制。伺服電機憑借這些特性,能精確控制扭矩、速度或位置,即使在零速度下,也能保持足夠的扭矩以鎖定負載。
2023-11-10 10:46:39246 
伺服電機在空載時出現(xiàn)過壓報警,加上負載后卻沒報警了可正常運行,哪個參數(shù)有問題?
2023-11-06 06:48:04
直流伺服電機需要電流環(huán)嗎?交流伺服電機電流環(huán)有什么用?
2023-11-03 07:07:06
通過總線控制伺服電機時,如何進行回零(尋參考點)控制?這里就CANOPEN伺服電機的回零控制方法分享給大家。
2023-10-23 11:42:201627 
伺服電機可使控制速度、位置精度非常準確,可以將電壓信號轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動控制對象。伺服電機轉(zhuǎn)子轉(zhuǎn)速受輸入信號控制,并能反應,在自動控制系統(tǒng)中,用作執(zhí)行元件,且具有機電時間常數(shù)小、線性
2023-10-10 09:37:10988 
當伺服電機在零速時發(fā)生抖動,應該是增益設高了,可減小增益值。如果啟動時抖動一下即報警停車了,最大可能是電機相序不正確。
2023-10-08 17:08:09505 
停止旋轉(zhuǎn)的原因及處理松下伺服電機為什么不旋轉(zhuǎn)?如何處理?松下伺服電機可使控制速度,位置精度非常準確。將電壓信號轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動控制對象。在使用松下伺服電機時可能會遇到一些故障,導致松下伺服電機
2023-09-20 08:08:361109 三菱伺服驅(qū)動器可能因操作不當或設備故障而停止工作。此時,應根據(jù)三菱伺服驅(qū)動報警代碼確認故障原因。三菱伺服驅(qū)動器常見報警代碼及解決辦法?一、三菱伺服系統(tǒng)主要采用三個系列
2023-09-11 08:08:3621579 作為一種控制器,伺服驅(qū)動器常用于控制伺服電機,在需要高精度的定位系統(tǒng)中,伺服驅(qū)動器是伺服系統(tǒng)中很重要的一部分。今天介紹的是在自動化應用中,伺服驅(qū)動器常見的一些故障以及處理方式。
2023-09-09 10:48:081583 要減輕伺服電機的磨損,可以采取以下措施: (1)適當?shù)臐櫥憾ㄆ趯?b class="flag-6" style="color: red">伺服電機進行潤滑是減輕磨損的重要步驟。使用適合的潤滑劑,按照制造商的建議和規(guī)定進行潤滑,確保電機內(nèi)部零部件的摩擦和磨損得到有效減少
2023-09-08 17:05:01250 
在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的控制伺服,其實就是對伺服電機的位置控制。其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應用比較少而已。
2023-09-08 11:22:48734 直流伺服電機分為有刷和無刷電機。有刷電機成本低,結(jié)構(gòu)簡單,啟動轉(zhuǎn)矩大,調(diào)速范圍寬,控制容易,需要維護,但維護方便(換碳刷),產(chǎn)生電磁干擾,對環(huán)境有要求。因此它可以用于對成本敏感的普通工業(yè)和民用場合。
2023-09-07 11:14:17377 
在工業(yè)自動化時代,運動控制中,伺服機電是最常見的控制部分。伺服電機在工作中,出現(xiàn)一下故障是在所難免的,但是,如果遇到一些查常見的故障問題,我們將如何解決呢?下面我們來分享一些常見的伺服電機故障及相對
2023-09-07 08:08:581440 伺服電機的構(gòu)造伺服電機是直流電機,具有以下5個部分:1.定子繞組:這種類型的繞組繞在電機的固定部分。它也被稱為電機的勵磁繞組。2.轉(zhuǎn)子繞組:這種類型的繞組繞在電機的旋轉(zhuǎn)部分。它也被稱為電機的電樞繞組
2023-08-31 08:08:401322 什么是伺服電機?伺服是一種電磁裝置,利用負反饋機制將電信號轉(zhuǎn)換為受控運動。基本上,伺服系統(tǒng)的行為類似于執(zhí)行器,提供對速度、加速度和線性或角度位置的精確控制。它由四件事組成:直流電機、位置傳感器、齒輪
2023-08-30 08:08:521675 電子元件燒壞原因是什么?導致元器件燒蝕的原因? 電子元件燒壞是電子設備中常見的故障之一。當電子設備經(jīng)過長時間使用或由于其他因素導致等問題時,電子元件的電氣參數(shù)會逐漸發(fā)生變化,最終會導致元件燒壞。那么
2023-08-29 16:58:422864 電機哆嗦是什么原因 電機振動是什么原因? 電機哆嗦和電機振動是常見的問題。電機哆嗦指的是電機運轉(zhuǎn)時,產(chǎn)生明顯的顫動,而電機振動則是指電機震動幅度較大的問題。這兩種問題均會影響電機的工作效率,降低設備
2023-08-28 17:43:141930 伺服電機編碼器是安裝在伺服電機上用來測量磁極位置和伺服電機轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服編碼器,市場上
2023-08-25 08:09:031588 伺服電機在轉(zhuǎn)動的過程中還有停下后老是顫動怎么辦?
用伺服電機帶動轉(zhuǎn)盤轉(zhuǎn)動,每轉(zhuǎn)180度停一次,但是停下后轉(zhuǎn)盤老是顫動,好像伺服電機的軸鎖的不是很牢固,怎么辦呢?
這個好象慣量大,可以更換大功率電機或加減速機。
2023-08-23 11:31:422897 常見伺服故障及處理主要介紹伺服驅(qū)動器故障信息的讀取及其原因和解決措施。??
2023-08-21 10:23:06 5
5 在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的控制伺服,其實就是對伺服電機的位置控制。其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應用比較少而已。
2023-08-09 09:25:28599 。可是在工作使用當中,難免出現(xiàn)一下故障。下面,為大家來分享幾種常見伺服系統(tǒng)的故障與處理方法,值得借鑒一下。1、LED燈是綠的,但是電機不動(1)故障原因:一個或多個方
2023-08-08 08:09:211262 伺服電機因為長期連續(xù)不斷使用或者使用者操作不當,會經(jīng)常發(fā)生電機故障,維修又相對復雜的。小編收集了伺服電機發(fā)生的13種常見的故障問題的維修方法,供大家學習借鑒。
2023-08-07 11:20:231999 在自動化設備中,經(jīng)常用到伺服電機,特別是位置控制,大部分品牌的伺服電機都有位置控制功能,通過控制器發(fā)出脈沖來控制伺服電機運行,脈沖數(shù)對應轉(zhuǎn)的角度,脈沖頻率對應速度(與電子齒輪設定
2023-08-07 11:11:411620 機器人在運行過程中,是通過伺服電機的驅(qū)動實現(xiàn)多自由度的運動的。如果對機器人運行的動作速度、精度有比較高的要求,實際就要求伺服電機的響應速度、控制精度要足夠高。因此,在選擇伺服電機的時候,一定要掌握
2023-08-05 08:09:39796 有些系統(tǒng)如傳送裝置,升降裝置等要求伺服電機能盡快停車,而在故障、急停、電源斷電時伺服器沒有再生制動,無法對電機減速。同時系統(tǒng)的機械慣量又較大,這時對動態(tài)制動器的要依據(jù)負載的輕重、電機的工作速度等進行選擇。
2023-08-03 10:33:21327 的周期、更高的生產(chǎn)率、更好的可靠性和更長的壽命。為了實現(xiàn)伺服電機的更好性能,就必須對伺服電機的一些使用特點有所了解。問題一:噪聲,不穩(wěn)定客戶在一些機械上使用伺服電機
2023-08-03 08:09:33499 的周期、更高的生產(chǎn)率、更好的可靠性和更長的壽命。為了實現(xiàn)伺服電機的更好性能,就必須對伺服電機的一些使用特點有所了解。
2023-08-01 10:38:51195 選擇防爆電機類型,是根據(jù)具體應用需求和系統(tǒng)要求而定。以下是防爆伺服電機和防爆步進電機的一些特點和比較,以幫助您做出選擇。防爆伺服電機優(yōu)點:高精度和高動態(tài)響應:伺服電機具有閉環(huán)控制系統(tǒng),可以實現(xiàn)更精
2023-07-31 22:29:06384 交流伺服電機的價格相對較高,對于一些預算有限的應用來說可能不太適合。另外,交流伺服電機在低速和低負載情況下的效率較低,不如直流伺服電機表現(xiàn)出色。
2023-07-23 11:49:13736 數(shù)控機床伺服電機是數(shù)控系統(tǒng)中重要的動力驅(qū)動裝置,對于確保機床的穩(wěn)定性和精度至關重要。如果出現(xiàn)故障,及時的維修是至關重要的。下文是小編為您整理的一些常見的數(shù)控機床伺服電機故障及其維修方法,幫助您解決一些常見的問題。
2023-07-19 11:25:04731 smt廠貼片加工存在的一些不良是需要大幅度減少的,尤其是SMT貼片加工中的一些操作失誤導致的不良,找出錯誤的原因并解決。下面佳金源錫膏廠家就給大家介紹一下常見的smt廠的貼片加工出現(xiàn)不良和原因
2023-07-08 13:55:47880 
伺服電機是我們常用的一種電機,在本文的案例中,將學習如何使用單片機控制伺服電機,案例以PIC16F877A單片機作為接口的連接與控制示例。
2023-07-06 10:53:142779 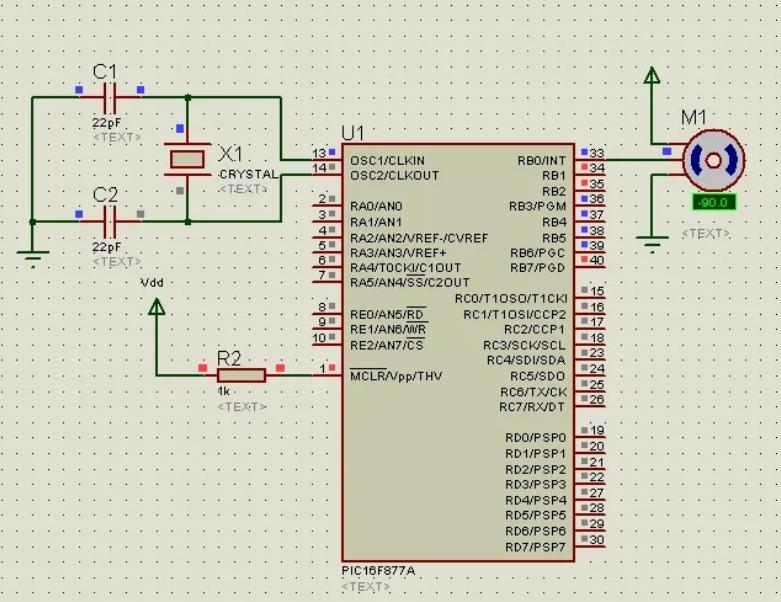
SEW伺服驅(qū)動系統(tǒng)由伺服減速電機和伺服變頻器組成,伺服電機分為同步伺服(DS,DY,CM)和異步伺服(CT,CV),按照傳統(tǒng)的分類,這里特別介紹恒場同步永磁伺服電機及其驅(qū)動變頻器。
2023-07-03 14:58:24846 
伺服電機具有獨特的特性,即根據(jù)輸入信號的脈沖寬度轉(zhuǎn)向特定角度(0,90,180)。這些伺服電機廣泛用于機器人應用、機械控制等。通常微控制器將用于控制伺服電機,但偶爾您會發(fā)現(xiàn)一些其他IC用于此目的。本文介紹了伺服電機的工作原理和工作原理。
2023-06-29 15:44:291637 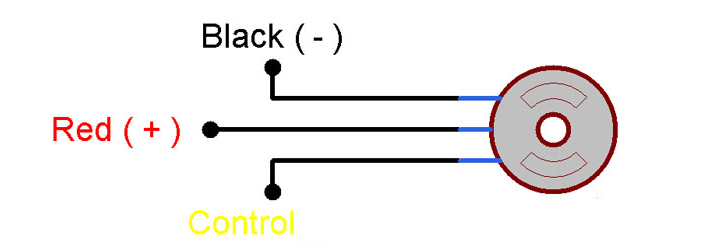
當驅(qū)動器將電流送到電機時,電機立即產(chǎn)生扭矩;一開始,由于V形帶會有彈性,負載不會加速到像電機那樣快;伺服電機會比負載提前到達設定的速度,此時裝在電機上的偏碼器會削弱電流,繼而削弱扭矩;隨著V型帶張力的不斷增加會使電機速度變慢,此時驅(qū)動器又會去增加電流,周而復始。
2023-06-26 18:40:04208 
伺服電機編碼器 伺服電機編碼器是安裝在伺服電機上用來測量磁極位置和伺服電機轉(zhuǎn)角及轉(zhuǎn)速的一種傳感器,從物理介質(zhì)的不同來分,伺服電機編碼器可以分為光電編碼器和磁電編碼器,另外旋轉(zhuǎn)變壓器也算一種特殊的伺服
2023-06-26 14:01:01899 步進電機,舵機,伺服電機的區(qū)別?
2023-06-19 11:50:02
伺服電機用于各種應用,如機器人、工業(yè)、計算機、門、玩具等等。但與通用直流電機不同,我們可以控制伺服電機的角度。這提供了使用此電機的更精確的運動。但是伺服需要特殊的電路才能運行。這就是上述伺服電機
2023-06-18 11:11:15525 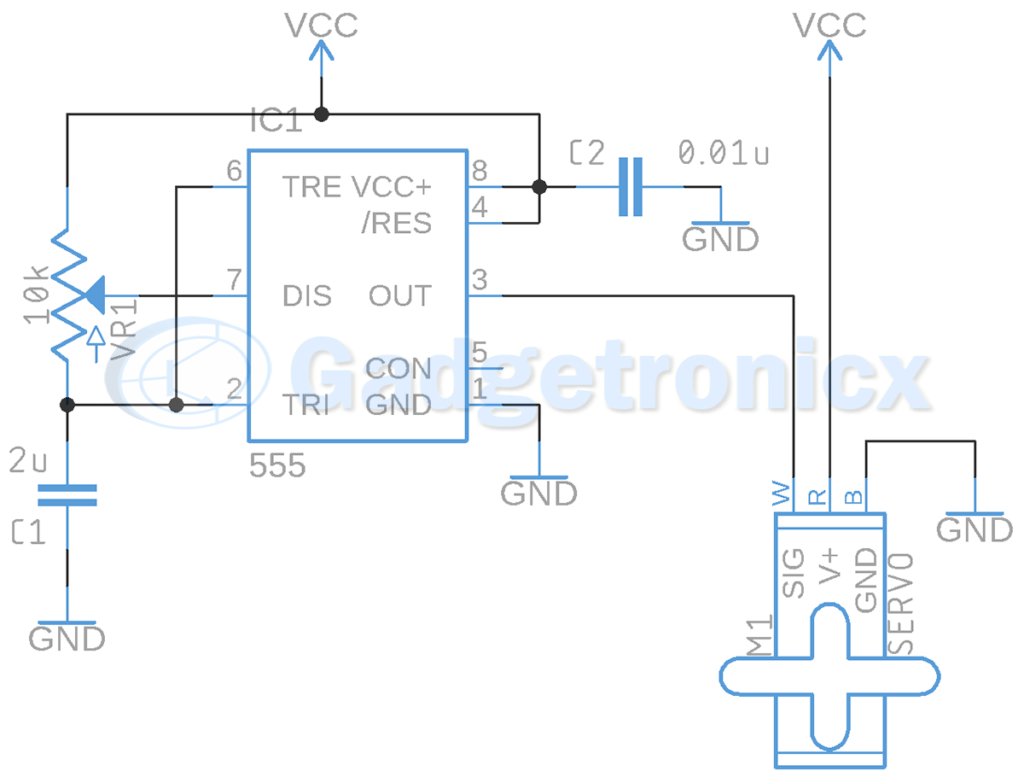
的連續(xù)旋轉(zhuǎn)伺服器。使用微控制器控制伺服電機是一種常見的做法。然而,在這個伺服電機控制電路中,我們將使用定時器芯片IC555來控制它的方向。
2023-06-18 09:58:21406 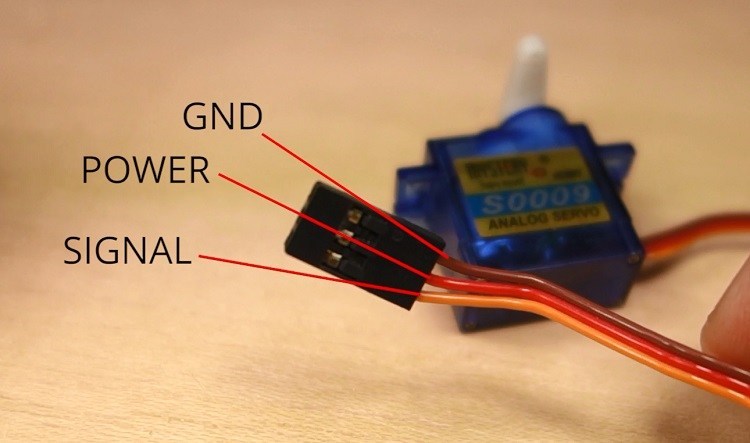
伺服電機又稱執(zhí)行電機,在自動控制系統(tǒng)中,用作執(zhí)行元件,把收到的電信號轉(zhuǎn)換成電機軸上的角位移或角速度輸出。伺服電機內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動器控制的U/V/W三相電形成電磁場,轉(zhuǎn)子在此磁場的作用下轉(zhuǎn)動
2023-06-13 11:18:391337 步進伺服和步進電機都是一種設備,但它們的工作原理和控制方式有所不同。 步進電機是一種常見的電動機,其工作原理是通過交替通電使電機轉(zhuǎn)子按照一定的步距旋轉(zhuǎn)。步進電機通常采用開環(huán)控制方式,即根據(jù)輸入的脈沖
2023-06-13 08:30:02492 伺服編碼器是工業(yè)機器人技術(shù)核心伺服電機的必配,對于伺服電機性能乃至機器人性能的作用極為關鍵。
2023-05-25 11:35:342560 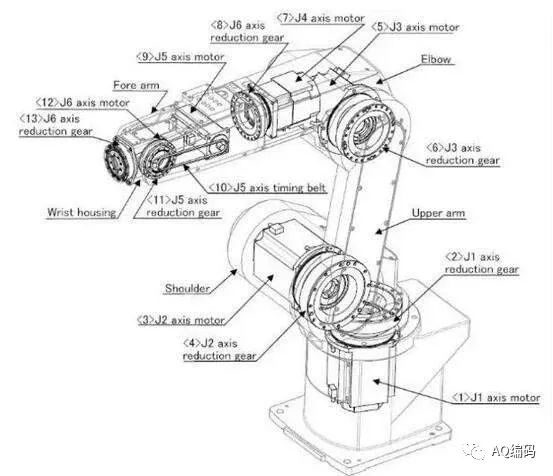
的周期、更高的生產(chǎn)率、更好的可靠性和更長的壽命。為了實現(xiàn)伺服電機的更好性能,就必須對伺服電機的一些使用特點有所了解。
2023-05-19 10:44:356104 
伺服驅(qū)動器在控制信號的作用下驅(qū)動執(zhí)行電機,因此驅(qū)動器是否能正常工作直接影響設備的整體性能。在伺服控制系統(tǒng)中,伺服驅(qū)動器相當于大腦,執(zhí)行電機相當于手腳。而伺服驅(qū)動器在伺服控制系統(tǒng)中的作用就是調(diào)節(jié)電機的轉(zhuǎn)速,因此也是一個自動調(diào)速系統(tǒng)。
2023-05-09 14:54:5615642 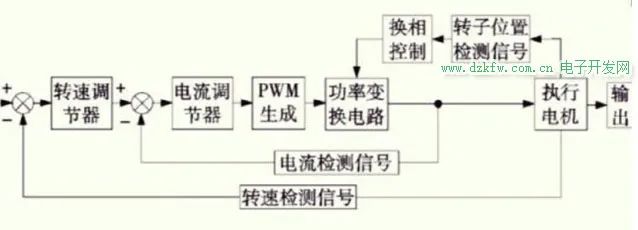
伺服驅(qū)動電機,簡稱伺服電機,是在普通電機的基礎上集成編碼器的產(chǎn)物。
2023-05-08 09:55:13458 或鏈條系統(tǒng)讓機器人移動。
伺服電機是機器人應用中常見的一種電機,其基本控制原理是利用控制回路、結(jié)合必要的電機反饋,從而協(xié)助電機進入所需的狀態(tài),如位置與速度等。由于伺服電機必須通過控制回路了解目前狀態(tài),因 此其穩(wěn)
2023-05-06 11:06:371 伺服電機是一個閉環(huán)系統(tǒng),它使用位置反饋來控制其運動和最終位置。伺服電機有多種類型,其主要特點是能夠精確控制其軸的位置。在工業(yè)型伺服電機中,位置反饋傳感器通常是高精度編碼器,而在較小的 RC 或業(yè)余
2023-05-06 10:08:212 在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的伺服控制,其實就是對伺服電機的位置控制。 其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應用比較少而已。
2023-04-27 17:34:351113 
交流伺服電機的性能要好一些,因為交流伺服是正弦波控制,轉(zhuǎn)矩脈動小;而無刷直流伺服是梯形波控制。但無刷直流伺服實現(xiàn)控制比較簡單,便宜。
2023-04-26 10:27:00832 ,最大功率可達5KW。集可編程運動控制、PLC、伺服驅(qū)動功能于一體。主要應用于直線(DDL)、力矩(DDR)、音圈、有刷、無刷伺服電機的位置、速度、轉(zhuǎn)矩控制。它能以
2023-04-20 10:21:24
伺服電動機分為直流伺服電機和交流伺服電機。直流伺服電機比較便宜,交流伺服電機比較常用。
2023-04-04 15:05:451421 PLC步進電機指令可以控制伺服電機么? 也就是步進電機指令和伺服電機指令有區(qū)別嗎?
2023-03-30 17:34:11
PLC步進電機指令可以控制伺服電機么? 也就是步進電機指令和伺服電機指令有區(qū)別嗎?
2023-03-30 17:34:10
步進電機和伺服電機哪個好,這個沒有絕對的答案,適合的才是最好的!下面從步進電機和伺服電機各種的優(yōu)缺點、性能特點
進行分析:
步進電機是一種感應電機,它的工作原理是利用電子電路,將直流電變成
2023-03-23 11:07:324
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論