接近/占位傳感器 雷達(dá)
2024-03-14 21:24:14
SW-UWB-M-A2X2 是一款工作于 UWB 頻段的超寬帶人體監(jiān)測(cè)雷達(dá)模組,可以在設(shè)定區(qū)域內(nèi)以極高的靈敏度非接觸式感應(yīng)人體的存在,測(cè)量人體的呼吸和心率,長(zhǎng)時(shí)間監(jiān)測(cè)后可以生成睡眠質(zhì)量的分析報(bào)告
2024-03-06 09:51:03
我們計(jì)劃在我們的項(xiàng)目中使用英飛凌的藍(lán)牙模塊之一。
AIROC 藍(lán)牙模塊的使用壽命是多少(壽命終止)? 我們正在尋找一款支持經(jīng)典藍(lán)牙配置文件或支持雙模式(經(jīng)典和 BLE)的模塊。
我們正在尋找一款理想情況下可以獲得5年技術(shù)支持的藍(lán)牙模塊。 3年也是一個(gè)不錯(cuò)的術(shù)語(yǔ)。
2024-03-01 13:57:03
雷達(dá)物位計(jì)是一種常用的工業(yè)自動(dòng)化設(shè)備,用于測(cè)量?jī)?chǔ)罐、槽罐和其他容器中的物料的高度和液位。它采用雷達(dá)技術(shù),可以實(shí)時(shí)準(zhǔn)確地監(jiān)測(cè)物料的水平,并將數(shù)據(jù)傳輸給控制系統(tǒng),以便進(jìn)行實(shí)時(shí)控制和管理。 下面將詳細(xì)介紹
2024-02-18 16:16:02 230
230 雷達(dá)測(cè)速的基本原理: 雷達(dá)測(cè)速是一種常見(jiàn)的交通工具超速監(jiān)控手段,它借助雷達(dá)技術(shù)可以準(zhǔn)確測(cè)量車(chē)輛的速度。它的基本原理是利用雷達(dá)波束的多普勒效應(yīng)來(lái)測(cè)量目標(biāo)物的速度。 雷達(dá)測(cè)速設(shè)備通常由一個(gè)發(fā)射器
2024-02-03 14:10:35340 ,致力于為可持續(xù)發(fā)展、互聯(lián)互通和更安全的世界提供動(dòng)力。公司隆重宣布推出MITI-7L磁簧開(kāi)關(guān)系列,與現(xiàn)有的7 mm磁簧開(kāi)關(guān)相比,這些超小型磁簧開(kāi)關(guān)具有更長(zhǎng)的使用壽命和更高的可靠性,可實(shí)現(xiàn)數(shù)百萬(wàn)次循環(huán)。 其超長(zhǎng)的使用壽命超出了工業(yè)磁簧繼電器、測(cè)試設(shè)備和安全應(yīng)用的要求。 這些磁簧開(kāi)關(guān)還具有
2024-02-01 11:33:4091 GKRD68脈沖型雷達(dá)物位計(jì)采用了先進(jìn)的微處理器和獨(dú)特的EchoDiscovery回波處理技術(shù),因此雷達(dá)物位計(jì)可應(yīng)用于各種復(fù)雜的工況。采用脈沖工作方式,雷達(dá)物位計(jì)發(fā)射功率極低,可安裝于
2024-01-24 09:42:05
毫米波雷達(dá)是一種高頻率雷達(dá)系統(tǒng),可以在毫米波頻段(30-300 GHz)進(jìn)行物體探測(cè)和測(cè)距,由于其具有高分辨率、較低的互相干擾和較強(qiáng)的透射穿透能力,被廣泛應(yīng)用于眾多領(lǐng)域。而超聲波雷達(dá)則是一種利用
2024-01-19 11:14:211117 通過(guò)天線主瓣進(jìn)入雷達(dá)的雜波稱(chēng)為主瓣雜波,否則稱(chēng)為旁瓣雜波。雜波常常是隨機(jī)的,具有類(lèi)似熱噪聲的特性。由于雜波強(qiáng)度往往要比接收機(jī)內(nèi)部噪聲大,雷達(dá)在強(qiáng)雜波背景下檢測(cè)目標(biāo)的能力主要取決于信號(hào)雜波比(信雜比SCR)。
2024-01-19 09:58:42154 
Ambarella成立于2004年,是一家專(zhuān)注于視頻芯片技術(shù)的公司,2021年收購(gòu)了4D毫米波雷達(dá)算法公司傲酷(Oculii)。首次引入4D成像雷達(dá)、虛擬孔徑成像雷達(dá)、中央域控4D成像雷達(dá),以及
2024-01-17 16:42:46405 
。 一、原理及工作方式 毫米波雷達(dá):毫米波雷達(dá)利用射頻波段的電磁波,主要工作在毫米波頻段(30-300 GHz)。它通過(guò)傳輸和接收射頻信號(hào),利用回波的時(shí)間差來(lái)計(jì)算目標(biāo)物體的距離、速度和方位。毫米波雷達(dá)通常采用頻率調(diào)制連續(xù)波(FMCW)技術(shù)或脈沖多普勒技術(shù),可以實(shí)現(xiàn)高精度測(cè)距和目標(biāo)辨識(shí)。 超聲波
2024-01-17 09:25:551562 我們知道,雷達(dá)波束越窄,探測(cè)距離越遠(yuǎn),系統(tǒng)精確性也越高。但雷達(dá)天線并不能將所有功率集中到單個(gè)波束中,實(shí)際雷達(dá)功率常被分成幾個(gè)部分,也就是常說(shuō)的雷達(dá)主瓣、旁瓣等。
2024-01-12 09:19:40672 
毫米波雷達(dá)是一種使用毫米波頻段進(jìn)行雷達(dá)探測(cè)的設(shè)備。它是一種高頻雷達(dá),工作頻段通常在30 GHz到300 GHz之間。相比于傳統(tǒng)的千兆赫雷達(dá),毫米波雷達(dá)具有更高的分辨率和更好的精度,可以在更短的距離
2024-01-09 16:56:05246 結(jié)合現(xiàn)場(chǎng)實(shí)際情況,考慮到常規(guī)雷達(dá)無(wú)法克服高溫?cái)嚢琛?qiáng)腐蝕和大量泡沫對(duì)于測(cè)量產(chǎn)生的嚴(yán)重影響,且后期可能會(huì)帶來(lái)不菲的維護(hù)成本,客戶(hù)決定使用定華G80調(diào)頻雷達(dá)物位計(jì)解決現(xiàn)場(chǎng)液位測(cè)量難題。
2024-01-05 14:29:3892 
? ? ? ?雷達(dá)模組的應(yīng)用范圍非常廣泛,尤其在IoT環(huán)境搭建中起到重要作用。不同的雷達(dá)模組工作波段有很大區(qū)別,應(yīng)根據(jù)具體的應(yīng)用環(huán)境和所需的性能指標(biāo)來(lái)選擇合適的雷達(dá)模組。 安信可目前已推出Rd-01
2023-12-25 17:12:19193 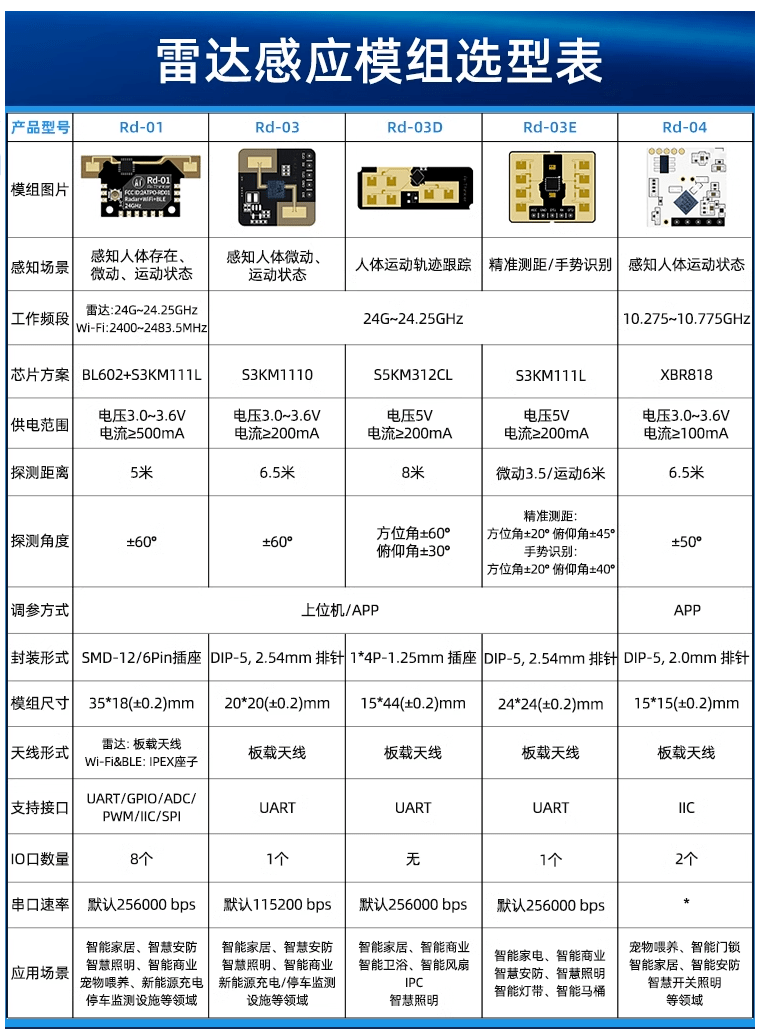
雷達(dá)模組的應(yīng)用范圍非常廣泛,尤其在IoT環(huán)境搭建中起到重要作用。不同的雷達(dá)模組工作波段有很大區(qū)別,應(yīng)根據(jù)具體的應(yīng)用環(huán)境和所需的性能指標(biāo)來(lái)選擇合適的雷達(dá)模組。
2023-12-22 18:13:30296 
雷達(dá)是一種利用電磁波進(jìn)行目標(biāo)探測(cè)和跟蹤的設(shè)備。它在軍事、航空、海洋、天文和氣象等領(lǐng)域具有廣泛的應(yīng)用。雷達(dá)的種類(lèi)可以按照不同的分類(lèi)方式進(jìn)行劃分。在本文中,我們將按照雷達(dá)的工作方式,將雷達(dá)分為三種
2023-12-21 11:38:331091 倒車(chē)雷達(dá)的工作原理? 倒車(chē)雷達(dá)是一種汽車(chē)安全輔助設(shè)備,可以通過(guò)使用超聲波或雷達(dá)技術(shù)來(lái)幫助駕駛員在倒車(chē)時(shí)檢測(cè)障礙物。它通過(guò)發(fā)射無(wú)害的超聲波或雷達(dá)信號(hào),并根據(jù)信號(hào)的反彈時(shí)間和強(qiáng)度來(lái)計(jì)算距離和障礙物位置
2023-12-20 10:56:42705 激光雷達(dá)(Lidar)和毫米波雷達(dá)(mmWave Radar)是兩種常見(jiàn)的距離傳感器技術(shù),都被廣泛應(yīng)用于自動(dòng)駕駛、無(wú)人機(jī)、安全監(jiān)測(cè)和環(huán)境感知等領(lǐng)域。它們?cè)诠ぷ髟怼⑿阅芴攸c(diǎn)和應(yīng)用方向等方面有著很多
2023-12-19 09:54:33802 所謂雷達(dá),就是用電磁波探測(cè)目標(biāo)的電子設(shè)備。激光雷達(dá)(LightDetectionAndRanging,簡(jiǎn)稱(chēng)"LiDAR"),顧名思義就是以激光來(lái)探測(cè)目標(biāo)的雷達(dá)。
2023-12-18 17:18:13928 
作為替代傳統(tǒng)雷達(dá)的主力軍,擁有仰角功能和更高像素精度的4D雷達(dá)為標(biāo)志性的革新。其角分辨率高達(dá)1°,遠(yuǎn)優(yōu)于3D雷達(dá)的4-6°分辨率,能夠顯著增強(qiáng)對(duì)物體的識(shí)別度。然而這樣高質(zhì)量的表現(xiàn)需要更強(qiáng)大的計(jì)算力才能處理所產(chǎn)生的大量數(shù)據(jù)。
2023-12-18 09:59:52189 毫米波雷達(dá)物位計(jì)與傳統(tǒng)雷達(dá)液位計(jì)區(qū)別在哪里呢? 毫米波雷達(dá)物位計(jì)和傳統(tǒng)雷達(dá)液位計(jì)是兩種測(cè)量物位的技術(shù),它們?cè)谠怼?yīng)用、測(cè)量范圍、精度等方面存在一些區(qū)別。 首先,毫米波雷達(dá)物位計(jì)是一種使用微波信號(hào)
2023-12-12 15:04:56377 AD5640BRJZ的使用壽命/年限是多少?
2023-12-11 08:18:38
,可以提供更高的分辨率。這意味著毫米波雷達(dá)可以更準(zhǔn)確地檢測(cè)和定位目標(biāo),即使目標(biāo)非常小或密集在一起。 2. 高精度:毫米波雷達(dá)可以提供高精度的距離、速度和方位信息。這對(duì)于一些需要精確測(cè)量的應(yīng)用,例如目標(biāo)跟蹤、車(chē)輛測(cè)速等非
2023-12-08 11:17:572576 只發(fā)射一條激光束,而多線激光雷達(dá)則同時(shí)發(fā)射多條激光束。單線激光雷達(dá)通常使用旋轉(zhuǎn)鏡和激光二極管的組合來(lái)掃描周?chē)h(huán)境。它通過(guò)旋轉(zhuǎn)鏡的旋轉(zhuǎn)來(lái)改變激光束的方向,并通過(guò)激光二極管發(fā)射脈沖激光。而多線激光雷達(dá)則可以通過(guò)多個(gè)激
2023-12-07 15:48:331843 多個(gè)雷達(dá)可以構(gòu)成雷達(dá)網(wǎng)實(shí)現(xiàn)對(duì)地面目標(biāo)的連續(xù)覆蓋。常規(guī)飛機(jī)無(wú)法在未被探測(cè)到的情況下穿透雷達(dá)網(wǎng)。
2023-12-06 11:29:22248 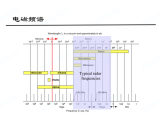
首先,Ollie Ballinger使用的是公開(kāi)可獲得的數(shù)據(jù),這些數(shù)據(jù)是通過(guò)衛(wèi)星捕獲的,他使用這些數(shù)據(jù)來(lái)檢測(cè)和追蹤軍事雷達(dá)。這意味著,任何人只要有足夠的專(zhuān)業(yè)知識(shí),都可以使用這些數(shù)據(jù)來(lái)查找軍事雷達(dá)發(fā)射器。
2023-12-05 14:49:58318 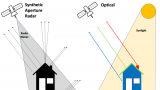
接收器會(huì)接收到反射回來(lái)的信號(hào)。根據(jù)信號(hào)的往返時(shí)間,可以計(jì)算出水面與雷達(dá)水位計(jì)之間的距離,從而確定水位的高低。
2023-11-29 15:05:35
駐車(chē)雷達(dá)主要通過(guò)使用超聲波或雷達(dá)技術(shù)來(lái)檢測(cè)車(chē)輛周?chē)恼系K物,從而提供環(huán)境感知和距離提示。它可以測(cè)量與障礙物的距離,并通過(guò)聲音或視覺(jué)警告向駕駛員傳達(dá)障礙物的存在或接近。駐車(chē)雷達(dá)在車(chē)輛停車(chē)時(shí)可以有效地檢測(cè)周?chē)恼系K物,幫助駕駛員避免碰撞。
2023-11-23 16:55:30456 汽車(chē)超聲波雷達(dá)通常用于倒車(chē)輔助系統(tǒng),可以檢測(cè)到車(chē)輛周?chē)恼系K物和障礙物的距離。當(dāng)車(chē)輛靠近障礙物時(shí),雷達(dá)會(huì)發(fā)出警告信號(hào)(如聲音或視覺(jué)警告),幫助駕駛員避免碰撞。
2023-11-23 16:52:444002 使用串聯(lián)方法延長(zhǎng)鹵素?zé)舻?b class="flag-6" style="color: red">使用壽命及減少頻繁更換燈泡問(wèn)題
2023-11-21 06:19:04
雷達(dá)回波信號(hào)有兩個(gè)狀態(tài):有目標(biāo)和沒(méi)有目標(biāo)。雷達(dá)接收的回波中,既可能有目標(biāo)回波也存在噪聲和雜波等各種干擾信號(hào)。所以雷達(dá)目標(biāo)回波信號(hào)的檢測(cè)是在噪聲和雜波干擾背景中的二元信號(hào)最佳檢測(cè)問(wèn)題。
2023-11-18 09:16:45815 
成像雷達(dá)是一種主動(dòng)合成系統(tǒng)。安裝在平臺(tái)上的天線
一個(gè)側(cè)面朝地球表面方向的雷達(dá)信號(hào)。反射信號(hào),
被稱(chēng)為回波,從表面被反散射,并在一秒鐘后接收到。
同一天線(單站雷達(dá))。
2023-10-30 09:31:32176 
雙基地雷達(dá)概念
雙基地雷達(dá)可以定義為發(fā)射機(jī)和接收機(jī)位于不同位置的雷達(dá),而不是常規(guī)的單基地雷達(dá)。
最早的雷達(dá)是雙基地的,直到脈沖波形和T/R開(kāi)關(guān)的出現(xiàn)。
雙基地雷達(dá)可以使用自己的專(zhuān)用發(fā)射機(jī)或機(jī)會(huì)輻射源(發(fā)射機(jī))運(yùn)行。
2023-10-27 10:22:071020 
合成孔徑雷達(dá)(Sy nthetic Aperture Radar :SAR)是利用一個(gè)小天線沿著長(zhǎng)線陣的軌跡等速移動(dòng)并輻射相參信號(hào), 把在不同位置接收的回波進(jìn)行相干處理, 從而獲得較高分辨率的成像
2023-10-23 09:51:26697 
不同雷達(dá)的電磁信號(hào)調(diào)制方式 雷達(dá)是一種通過(guò)發(fā)送電磁波并接收其反射信號(hào)來(lái)探測(cè)物體的儀器。根據(jù)雷達(dá)的電磁信號(hào)調(diào)制方式不同,可以分為:脈沖雷達(dá)、連續(xù)波雷達(dá)和調(diào)頻雷達(dá)。本文將詳細(xì)介紹這三種雷達(dá)的特點(diǎn)
2023-10-20 14:21:42733 STM8的內(nèi)部flash的使用壽命有多長(zhǎng)
2023-10-12 07:06:55
物料高度是工業(yè)自動(dòng)化過(guò)程控制中一個(gè)非常重要的過(guò)程參數(shù)。測(cè)量物料高度的方法有很多,例如電容式、差壓式、超聲波、電磁波、核輻射等,針對(duì)不同的工況和介質(zhì)可以使用不同測(cè)量原理的物位計(jì)。隨著科技的高速發(fā)展
2023-10-08 15:02:25289 "本課件主要展示了一些基本的雷達(dá)信號(hào)處理內(nèi)容!
2023-10-08 10:21:23254 
有源雷達(dá)尋的系統(tǒng)由地面雷達(dá)系統(tǒng)與大尺寸天線組成, 帶有多個(gè)雷達(dá)制導(dǎo)導(dǎo)彈外殼的主動(dòng)雷達(dá)發(fā)射臺(tái)和 主動(dòng)雷達(dá)導(dǎo)彈本身。地面雷達(dá)可以是固定的,也可以是移動(dòng)的。通常安裝在現(xiàn)場(chǎng)的固定雷達(dá)稱(chēng)為空中監(jiān)視雷達(dá)。
2023-10-08 09:52:56309 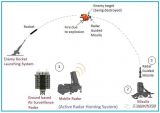
看到有文章說(shuō)濾波的時(shí)候提高電容容量可以降低負(fù)荷,增加使用壽命,這種說(shuō)法正確嗎?這樣做有什么弊端嗎?
2023-09-27 07:54:19
雷達(dá)料位計(jì)主要由發(fā)射和接收裝置、信號(hào)處理器、操作面板、顯示器、天線、故障報(bào)警裝置等 6部分組成。 雷達(dá)料位計(jì)利用雷達(dá)波的特性來(lái)檢測(cè)料位,其基本工作原理為發(fā)射—反射—接收。雷達(dá)料位計(jì)的天線以波束的形式
2023-09-27 07:19:31598 雷達(dá)的角分辨率是指雷達(dá)能夠分辨和區(qū)分同一距離上兩個(gè)大小相等的目標(biāo)的最小距離。當(dāng)兩個(gè)目標(biāo)間的距離大于雷達(dá)天線的半功率波束寬度時(shí),雷達(dá)更容易分辨它們。然而,即使兩個(gè)目標(biāo)在波束寬度內(nèi),只要它們的雷達(dá)信號(hào)特性(例如多普勒頻率)不同,先進(jìn)的雷達(dá)系統(tǒng)也能夠區(qū)分它們。
2023-09-25 10:02:16785 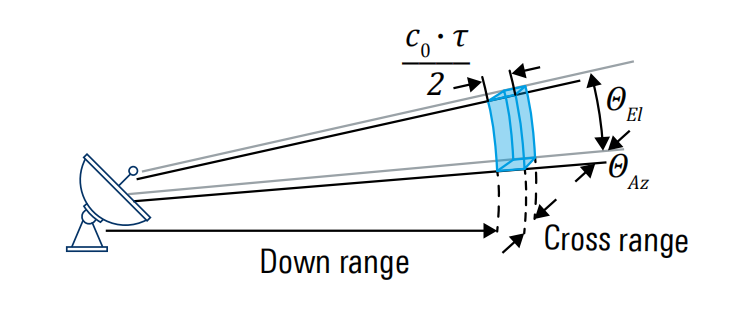
制作紅外激光感應(yīng)的雷達(dá)組件!包含代碼、詳細(xì)說(shuō)明
2023-09-22 07:49:01
°視場(chǎng)范圍內(nèi)保持一致。
傳統(tǒng)機(jī)械式激光雷達(dá)難以滿(mǎn)足車(chē)規(guī)級(jí)要求。傳統(tǒng)機(jī)械式激光雷達(dá),通過(guò)電機(jī)帶動(dòng)整個(gè)激光頭做圓周運(yùn)動(dòng),其掃描方式通常呈360度線式掃描。這種方式帶來(lái)的直接后果是無(wú)論掃描時(shí)間多長(zhǎng),線與線之間
2023-09-19 13:35:01
(heat-assisted detection and ranging)說(shuō)起。HADAR ? 的中文名是 " 高光譜熱雷達(dá) ",也可以簡(jiǎn)稱(chēng)為 " 熱雷達(dá) "。 ? 這是一種新穎的傳感范式,與現(xiàn)有的微波雷達(dá)(radar
2023-09-15 08:40:41334 
可靠。雷達(dá)產(chǎn)品振動(dòng)試驗(yàn)臺(tái)臺(tái)體尺寸:①500X500mm臺(tái)面頻率共振好増加1倍穩(wěn)定度 ②可二組一起振動(dòng) ③可做跳躍頻率/由定振幅轉(zhuǎn)定加速度(電
2023-09-11 14:06:53
螺桿支撐座的使用壽命有多久?
2023-08-31 17:40:50560 
4顆激光雷達(dá)的車(chē)型可以完全覆蓋車(chē)輛前、后、左、右四個(gè)方向,而3顆激光雷達(dá)的布置舍棄了后向,1顆或者2顆激光雷達(dá)的車(chē)型都將雷達(dá)布置在前向,但2顆激光雷達(dá)車(chē)型前向左右兩側(cè)的視場(chǎng)角要比1顆激光雷達(dá)的會(huì)更大一點(diǎn)。
2023-08-23 09:30:05838 
什么是固態(tài)雷達(dá)?固態(tài)激光雷達(dá)原理 固態(tài)雷達(dá)是一種采用固態(tài)材料發(fā)射和接收雷達(dá)信號(hào)的雷達(dá)系統(tǒng)。不同于傳統(tǒng)雷達(dá)采用開(kāi)關(guān)型微波管的方式,固態(tài)雷達(dá)利用半導(dǎo)體元器件實(shí)現(xiàn)信號(hào)發(fā)射和接收。隨著半導(dǎo)體技術(shù)的發(fā)展,固態(tài)
2023-08-22 16:45:272681 一個(gè)RF感應(yīng)雷達(dá)模塊電路,原來(lái)需要接主機(jī)軟件才能使用雷達(dá)感應(yīng)功能,可否單獨(dú)使用此模塊、紅色框電源和信號(hào)接口,黃色框是負(fù)載,綠色發(fā)射模塊,上電紅框內(nèi)第1/2線有12V電壓、4/6電壓輸出很低、負(fù)載正負(fù)無(wú)電壓。如何不通過(guò)原主機(jī)解決信號(hào)接入輸出問(wèn)題、還望各位師傅給講解一下。謝謝
2023-08-20 00:57:09
雷達(dá)能測(cè)量目標(biāo)相對(duì)于雷達(dá)的速度,它是距離的時(shí)間變化率。有時(shí)也可以用相對(duì)速度來(lái)代替距離變化率,這種情況下,速度是速度矢量的大小,通常稱(chēng)為徑向速度。
2023-08-14 10:31:03889 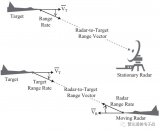
5.8G雷達(dá)模塊,人體存在感應(yīng)雷達(dá),微波雷達(dá)感應(yīng)技術(shù)應(yīng)用
2023-08-10 14:38:031291 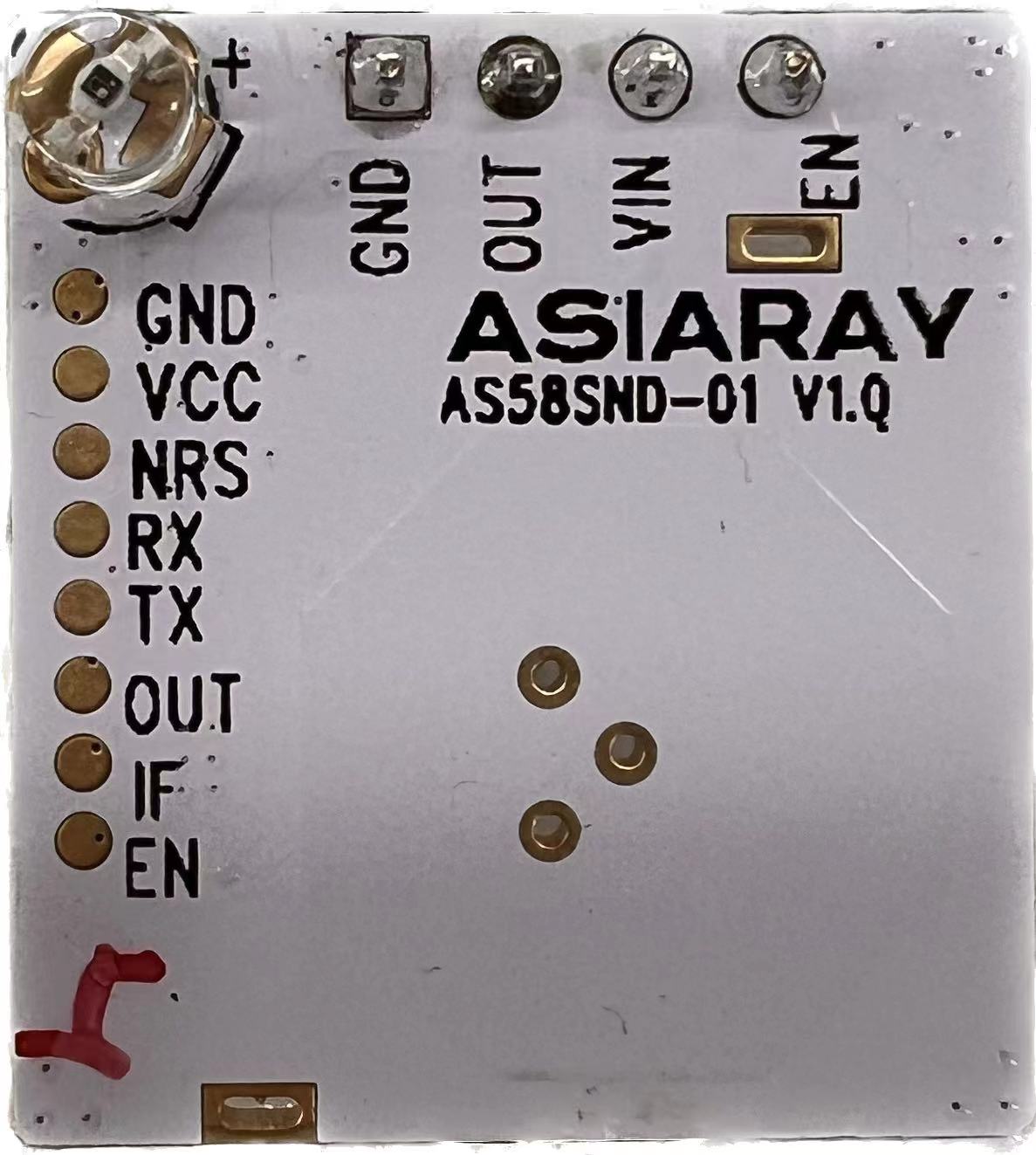
雷達(dá)網(wǎng)中三部測(cè)距單基地雷達(dá)組網(wǎng)有時(shí)被稱(chēng)為三邊測(cè)量雷達(dá)。三邊測(cè)量的概念也用在多基地雷達(dá)中,它借助到達(dá)時(shí)間差(TDOA)或差分多普勒技術(shù)來(lái)測(cè)量目標(biāo)位置。
2023-08-05 12:17:20894 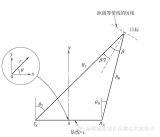
頻率匹配:雷達(dá)干擾系統(tǒng)須以被干擾雷達(dá)的頻率發(fā)射信號(hào)。這不只適用于噪聲干擾,也適用于欺騙干擾。
2023-07-25 09:38:411968 
交叉導(dǎo)軌的使用壽命
2023-07-20 17:39:26587 
激光雷達(dá)在自動(dòng)駕駛應(yīng)用中主要用來(lái)探測(cè)道路上的障礙物信息,把數(shù)據(jù)和信號(hào)傳遞給自動(dòng)駕駛的大腦,再做出相應(yīng)的駕駛動(dòng)作,但室外常見(jiàn)的干擾因素如雨、霧、雪、粉塵、高低溫等對(duì)激光雷達(dá)的識(shí)別造成了極大的影響。因此
2023-07-14 11:11:303320 4D毫米波雷達(dá)與傳統(tǒng)雷達(dá)不同,為了解決傳統(tǒng)毫米波雷達(dá)角分辨率低、點(diǎn)云密度低的問(wèn)題,當(dāng)下出現(xiàn)了四種4D毫米波雷達(dá)解決方案
2023-07-07 14:15:02618 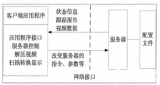
根據(jù)雷達(dá)波工作原理,嘉可儀表JK型雷達(dá)液位計(jì)采用了發(fā)射雷達(dá)波—反射雷達(dá)波—接收雷達(dá)波的工作模式。在工作時(shí)雷達(dá)液位計(jì)的發(fā)射端發(fā)出調(diào)頻連續(xù)波信號(hào),雷達(dá)波信號(hào)在觸碰到液面后反射回來(lái)并被雷達(dá)波接收端接
2023-07-03 10:50:03186 本文介紹了MIMO雷達(dá)波形的概念和特點(diǎn)。MIMO雷達(dá)波形可以通過(guò)增加發(fā)射天線數(shù)量來(lái)提高雷達(dá)系統(tǒng)的多樣性增益,從而實(shí)現(xiàn)更強(qiáng)的檢測(cè)性能。
2023-06-30 10:01:22932 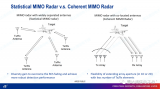
溫度補(bǔ)償衰減器的使用壽命取決于多種因素,例如制造工藝、材料質(zhì)量、工作條件等。一般來(lái)說(shuō),合理的使用和維護(hù)可以延長(zhǎng)溫度補(bǔ)償衰減器的使用壽命。
2023-06-27 11:11:00282 有一些區(qū)別,為了使大家可以更好的了解氣體檢測(cè)儀,下面就跟大家說(shuō)說(shuō)氣體檢測(cè)儀可以使用多久。 氣體檢測(cè)儀可以使用多久 1.氣體檢測(cè)儀的使用壽命在正常使用狀態(tài)下通常都可以達(dá)到5年。但是并不是說(shuō)所有類(lèi)型的儀器壽命都可以
2023-06-21 16:01:521024 
很多朋友購(gòu)物最關(guān)心的是商品的使用壽命。世界上沒(méi)有什么能長(zhǎng)久,貼片電容也是如此。今天,小編將帶你了解電容器的使用壽命。
標(biāo)稱(chēng)最高溫度85℃,在85℃環(huán)境溫度下,使用壽命可達(dá)1000小時(shí)
2023-06-18 15:57:015993 雷達(dá)液位計(jì)是一種非接觸式無(wú)可動(dòng)部件、真正免維護(hù)的液位測(cè)量?jī)x表。該儀表經(jīng)過(guò)多年的應(yīng)用及技術(shù)改進(jìn),目前廣泛應(yīng)用于石化行業(yè),并得到了用戶(hù)的認(rèn)可。本文簡(jiǎn)要介紹了雷達(dá)液位計(jì)的2種不同的測(cè)量原理,根據(jù)其特點(diǎn)
2023-06-14 10:35:11501 
一、安裝指南 在整個(gè)量程范圍內(nèi)確定纜或棒不要接觸到內(nèi)部障礙物,因此安裝時(shí)應(yīng)盡可能避開(kāi)罐內(nèi)設(shè)施,如:人梯、限位開(kāi)關(guān)、加熱設(shè)備、支架等。另外需注意纜或棒不得與加料料流相交。 二、安裝儀表時(shí)還需注意:最高料位不得進(jìn)入測(cè)量盲區(qū);儀表距離罐壁必須保持一定的距離;儀表的安裝盡可能使纜或棒的方向與被測(cè)介質(zhì)的表面垂直。安裝在防爆區(qū)域內(nèi)的儀表必須遵守國(guó)家防爆危險(xiǎn)區(qū)的安裝規(guī)定。本安型的外殼采用鋁殼。本安型儀表殼安裝在有防
2023-06-14 10:34:04335 
本文介紹了 24 GHz ISM 頻段內(nèi)調(diào)頻連續(xù)波 (FMCW) 雷達(dá)的生成。這包括此類(lèi)雷達(dá)系統(tǒng)所需的主要構(gòu)建模塊,例如斜坡生成、發(fā)射和接收級(jí)、下變頻和采樣。
2023-06-13 11:08:021731 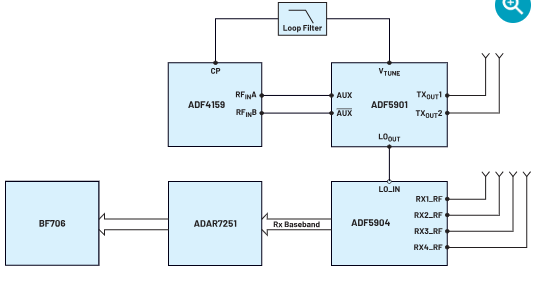
連續(xù)波雷達(dá)發(fā)送的是一個(gè)連續(xù)的無(wú)線電頻率信號(hào),通過(guò)接收目標(biāo)反射回來(lái)的回波信號(hào)來(lái)檢測(cè)目標(biāo)并計(jì)算距離。連續(xù)波雷達(dá)的優(yōu)點(diǎn)是信號(hào)處理簡(jiǎn)單、便于制造和使用,但其缺點(diǎn)是抗干擾性能較差,難以精確測(cè)量高速目標(biāo)的速度等問(wèn)題。常見(jiàn)的連續(xù)波雷達(dá)包括移動(dòng)雷達(dá)、陣列雷達(dá)、固定波束雷達(dá)等。
2023-06-02 18:00:316221 無(wú)線電探測(cè)及測(cè)距(Radio Detection and Ranging), 發(fā)射電磁波并接收目標(biāo)反射的回波信號(hào),通過(guò)對(duì)比發(fā)射信號(hào)與回收信號(hào),獲取目標(biāo)的位置、速度等信息。
毫米波雷達(dá)使用的電磁波
2023-06-01 11:33:36 9
9 濟(jì)南祥控自動(dòng)化研制的XKCON祥控雷達(dá)物位計(jì)采用高達(dá)26GHz的發(fā)射頻率進(jìn)行物料位檢測(cè),因此也被稱(chēng)為“脈沖雷達(dá)物位計(jì)”、“脈沖雷達(dá)料位計(jì)”或
2023-05-31 17:17:24
成像雷達(dá),或者是其他汽車(chē)上使用的雷達(dá),都可以統(tǒng)稱(chēng)為汽車(chē)雷達(dá)。 ? ? ? 4D指的是距離(Range)、速度(Velocity)、水平
2023-05-21 08:43:433477 
那么,雷達(dá)的測(cè)距、測(cè)角和測(cè)速又是怎么回事?看完此文保證你秒懂!
2023-05-18 11:09:10803 
泊車(chē)雷達(dá)系統(tǒng)的智能技術(shù)不能超越物理定律規(guī)定的極限,只能在系統(tǒng)極限范圍內(nèi)工作。切勿因?yàn)椴窜?chē)雷達(dá)系統(tǒng)提高了舒適性而冒險(xiǎn)行駛。泊車(chē)雷達(dá)系統(tǒng)不能代替駕駛員的注意力。
2023-05-17 16:38:23876 ? 車(chē)載激光雷達(dá)又稱(chēng)車(chē)載三維激光掃描儀,是一種移動(dòng)型三維激光掃描系統(tǒng),其原理都是將三維激光掃描儀加上POS系統(tǒng)裝載車(chē)上。目的就是為了能在更長(zhǎng),更遠(yuǎn)的范圍內(nèi)建立DTM模型。 ? 激光雷達(dá)的分類(lèi) 由于
2023-05-16 08:43:45524 
激光雷達(dá)即激光探測(cè)及測(cè)距系統(tǒng),是通過(guò)發(fā)射激光束來(lái)探測(cè)目標(biāo)位置、速度等特征量的雷達(dá)系統(tǒng)。按掃描維度,激光雷達(dá)可分為一維激光雷達(dá)、二維激光雷達(dá)和三維激光雷達(dá)。
2023-05-10 09:58:335390 
本文首發(fā)于公眾號(hào)【調(diào)皮連續(xù)波】,其他平臺(tái)為自動(dòng)同步,內(nèi)容若不全或亂碼,請(qǐng)前往公眾號(hào)閱讀。保持關(guān)注調(diào)皮哥,和1.4W雷達(dá)er一起學(xué)習(xí)雷達(dá)技術(shù)! ? 2023年度會(huì)員內(nèi)容更新公告(04.10) 序號(hào)
2023-05-08 10:45:161028 
,參考WTR-812調(diào)試手冊(cè)即可(官網(wǎng)也可下載),里面有非常詳細(xì)的安裝調(diào)試教程與注意事項(xiàng)。
默認(rèn)未啟用狀態(tài)顯示窗口
雷達(dá)安裝調(diào)試完成后,進(jìn)入【雷達(dá)調(diào)試助手】顯示窗口,在這個(gè)窗口可以任意繪制監(jiān)測(cè)區(qū)域范圍
2023-05-05 13:45:19
其實(shí)傳感器之間,因?yàn)楦兄脑聿煌蠹业馁惖酪膊煌热缂す?b class="flag-6" style="color: red">雷達(dá)的分工就是做精細(xì)的感知,做地圖構(gòu)建,檢測(cè)馬路牙子之類(lèi)的,像掃街車(chē)要裝激光雷達(dá)掃馬路牙子。
2023-05-04 15:58:38613 用于測(cè)距的雷達(dá)系統(tǒng)通常分為脈沖雷達(dá)和調(diào)頻連續(xù)波雷達(dá)。脈沖雷達(dá)技術(shù)借助于脈沖壓縮技術(shù)來(lái)提高分辨率,調(diào)頻連續(xù)波雷達(dá)技術(shù)是使發(fā)射電波的頻率連續(xù)快速地變化,利用瞬時(shí)的發(fā)射頻率與回波頻率之差來(lái)計(jì)算距離,但都是
2023-05-02 08:17:10611 保證雷達(dá)物位計(jì)的精準(zhǔn)性,延長(zhǎng)使用壽命。我們給大家整理出了三點(diǎn)技巧。 現(xiàn)場(chǎng)應(yīng)用圖 首先,在使用儀器時(shí),要注意規(guī)定的測(cè)量范圍,超出儀器測(cè)量范圍工作,不僅得不到準(zhǔn)確的數(shù)據(jù),還會(huì)對(duì)儀器造成損傷。 其次,在使用雷達(dá)物位計(jì)
2023-04-21 11:29:37321 
在眾多介紹雷達(dá)物位計(jì)的文章中,介紹天線的就只有一句概括:天線被進(jìn)一步優(yōu)化處理,新型快速的微處理器可以進(jìn)行更高速率的信號(hào)分析處理,使得儀表可以用于各種環(huán)境的測(cè)量。 不懂什么意思?不要著急,我們
2023-04-21 11:28:03649 
經(jīng)過(guò)三天的展覽,第十屆世界雷達(dá)博覽會(huì)、第三屆“雷達(dá)與未來(lái)”全球峰會(huì)在北京首鋼會(huì)展中心完美落幕。雷達(dá)博覽會(huì)展示了我國(guó)在雷達(dá)技術(shù)方面的各類(lèi)最新成就。以“雷達(dá)融合世界,數(shù)智引領(lǐng)未來(lái)”為主題,著力打造“雷達(dá)
2023-04-21 09:30:02204 
ADAS系統(tǒng)無(wú)人駕駛的眼睛毫米波雷達(dá)汽車(chē)已經(jīng)進(jìn)入無(wú)人駕駛探索階段,可以主動(dòng)防護(hù)汽車(chē)駕駛安全的高級(jí)駕駛輔助系統(tǒng)(以下簡(jiǎn)稱(chēng):ADAS)技術(shù)也正在逐步的完善。ADAS簡(jiǎn)單來(lái)說(shuō)就是讓汽車(chē)有感知系統(tǒng),可感受
2023-04-18 11:42:23
從某品牌10GHz FMCW雷達(dá)物位計(jì)的全生命周期來(lái)看,首先,F(xiàn)MCW雷達(dá)物位計(jì)的誕生源于新技術(shù)的應(yīng)用。當(dāng)脈沖雷達(dá)不能較好滿(mǎn)足測(cè)控要求時(shí),F(xiàn)MCW雷達(dá)物位計(jì)的出現(xiàn)具備明顯的后發(fā)優(yōu)勢(shì),這使得產(chǎn)品
2023-04-17 09:45:00349 分析了某品牌10GHz雷達(dá)物位計(jì)的4000個(gè)應(yīng)用樣本,該系列雷達(dá)物位計(jì)的應(yīng)用主要集中在化工、石化、醫(yī)藥、農(nóng)藥、鋼鐵冶金等行業(yè)。其中,化工、石化和制藥行業(yè)是工業(yè)儀表應(yīng)用較為密集的行業(yè),也是雷達(dá)物位計(jì)
2023-04-14 17:06:41398 1、第一代基礎(chǔ)型FMCW雷達(dá)物位計(jì)? 最早的調(diào)頻連續(xù)波雷達(dá)物位計(jì)主頻頻率為8.5~9.9GHz,掃頻帶寬為1GHz。由于功耗較大,基本上采用四線制轉(zhuǎn)換器。通信方式僅有HART通訊,信號(hào)輸出方
2023-04-13 12:01:12638 。雷達(dá)液位計(jì)具有較大的測(cè)量范圍,最大的測(cè)量范圍可達(dá)0~40m,且測(cè)量量程可以根據(jù)現(xiàn)場(chǎng)需要進(jìn)行修改,方便操作。 (2)雷達(dá)液位計(jì)發(fā)射的雷達(dá)波為電磁波,不受蒸汽、空氣及易揮發(fā)介質(zhì)的影響,可以測(cè)量氨水和苯。雷達(dá)液位計(jì)安裝在罐頂
2023-04-10 11:11:221123 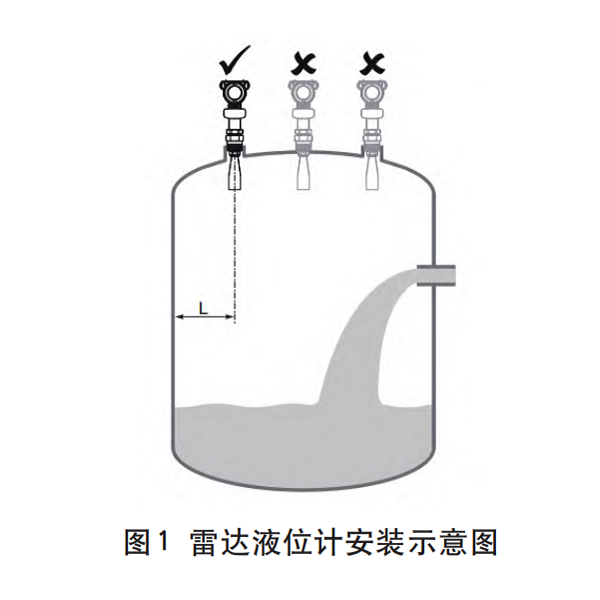
我們正在使用 S32K 系列,我們正在使用內(nèi)部時(shí)鐘 (LPO) 之一來(lái)同步 LIN 收發(fā)器。我們需要定義每個(gè)產(chǎn)品的壽命,其中一個(gè)依賴(lài)項(xiàng)需要 S32K144 中 LPO 的頻率與壽命。如果對(duì)低功率振蕩器的老化因素(使用 15 年)進(jìn)行了任何分析,您能否分享一下?謝謝。
2023-04-06 08:58:51
雷達(dá)按照發(fā)射信號(hào)的種類(lèi)可分成脈沖雷達(dá)和連續(xù)波雷達(dá),常規(guī)脈沖雷達(dá)發(fā)射周期性的調(diào)制脈沖信號(hào),而連續(xù)波雷達(dá)發(fā)射的是連續(xù)波信號(hào)。通常,脈沖雷達(dá)具有較高的峰值功率和較小的占空比,而連續(xù)波雷達(dá)則具有100%的占空比和較低的功率。
2023-04-04 10:01:512806 如何增加光纖光纜的使用壽命?-科蘭大家都知道,在進(jìn)行長(zhǎng)間距的傳輸數(shù)據(jù)時(shí)都是會(huì)應(yīng)用到光纖光纜這傳輸方式,因?yàn)樗邆洌鹤饔每孔V、品質(zhì)高、速度更快、路線耗損低、傳送間距遠(yuǎn)等特性。由于是長(zhǎng)間距的傳送,因此
2023-04-03 10:13:06684 我想按照這些步驟安裝 S32DS 的雷達(dá)擴(kuò)展包但失敗 了 。雷達(dá)擴(kuò)展包: [/td]1.1.0_D2105[td]適用于 S32 Design Studio 3.4 的 S32R45 雷達(dá)擴(kuò)展包 1.1.0S32DS:V3.5
2023-03-24 08:55:00
 電子發(fā)燒友App
電子發(fā)燒友App












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論