驅(qū)動(dòng)電機(jī)速度傳感器檢測(cè)驅(qū)動(dòng)電機(jī)的旋轉(zhuǎn)速度和旋轉(zhuǎn)方向(圖25),作為控制驅(qū)動(dòng)驅(qū)動(dòng)電機(jī)的三相交流電的基本信息。輸出信號(hào)輸入到驅(qū)動(dòng)電機(jī)控制模塊,驅(qū)動(dòng)電機(jī)控制模塊通過CAN通訊將輸入信號(hào)作為電機(jī)旋轉(zhuǎn)信號(hào)發(fā)送到VCU。
2024-03-22 10:18:58 27
27 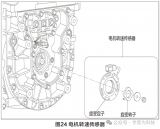
本文旨在為 SPM 31 v2 系列功率模塊設(shè)計(jì)提供實(shí)用指南,該系列智能功率模塊 (IPM) 適用于三相電機(jī)驅(qū)動(dòng),包含三相變頻段、柵極驅(qū)動(dòng)器等。
2024-03-17 17:03:07841 
碩博電子的永磁同步電機(jī)以一體化動(dòng)力總成為設(shè)計(jì)理念,將電機(jī)、電控集成于一體,無需7天等待(內(nèi)部已經(jīng)完成電機(jī)和驅(qū)動(dòng)器的標(biāo)定,在各個(gè)運(yùn)行狀態(tài)下,能效率最高運(yùn)行)。采用當(dāng)前先進(jìn)的矢量控制算法和CAN總線通信
2024-02-22 14:22:47127 
目前使用的英飛凌試用版Hightec軟件,想求助各位大佬“開發(fā)板-驅(qū)動(dòng)板-控制電機(jī)”的思路。
2024-02-19 06:41:33
的工作原理 交流伺服電機(jī)是一種特殊的交流電機(jī),由電機(jī)本身和電機(jī)驅(qū)動(dòng)器組成。電機(jī)驅(qū)動(dòng)器負(fù)責(zé)電機(jī)的控制和保護(hù)功能,通常包含電源模塊、控制模塊、位置檢測(cè)模塊和功率輸出模塊。 在交流伺服電機(jī)中,控制模塊起著核心的作用。它接
2024-02-18 14:59:25268 電路原理 步進(jìn)電機(jī)是一種開環(huán)控制系統(tǒng),通過不同的脈沖信號(hào)控制轉(zhuǎn)子旋轉(zhuǎn)的一種電機(jī)。步進(jìn)電機(jī)驅(qū)動(dòng)電路主要由電源、脈沖發(fā)生器、電流放大器和MOSFET等元件組成。下面將逐步介紹各個(gè)部分的原理。 電源:供應(yīng)電流和電壓給步進(jìn)電機(jī)
2024-01-24 10:46:14480 步進(jìn)電機(jī)控制方法 步進(jìn)電機(jī)是一種將電信號(hào)轉(zhuǎn)化為機(jī)械轉(zhuǎn)動(dòng)的電動(dòng)機(jī),其輸出轉(zhuǎn)角是按照電脈沖控制信號(hào)的變化而變化的。步進(jìn)電機(jī)的控制方法有幾種常見的方式,包括全步進(jìn)控制、半步進(jìn)控制和微步進(jìn)控制。 全步進(jìn)控制
2024-01-22 17:18:18313 該伺服驅(qū)動(dòng)器采用有2個(gè)相同的伺服電機(jī)驅(qū)動(dòng)板,電機(jī)編碼器信號(hào)通過接口反饋給控制芯片。伺服電機(jī)控制信號(hào)通過光耦連接到后端伺服電機(jī)驅(qū)動(dòng)芯片控制端。
2024-01-22 14:45:43293 
隨著各應(yīng)用領(lǐng)域?qū)?b class="flag-6" style="color: red">電機(jī)驅(qū)動(dòng)控制器的需求越來越大,電機(jī)驅(qū)動(dòng)控制器市場(chǎng)競(jìng)爭(zhēng)激烈,對(duì)半導(dǎo)體器件的產(chǎn)品質(zhì)量、供應(yīng)服務(wù)等都提出了不同要求。當(dāng)前,控制算法硬件化持續(xù)發(fā)展,但其有著怎樣的市場(chǎng)優(yōu)勢(shì)?又有怎樣的發(fā)展局
2024-01-19 11:38:20104 
步進(jìn)電機(jī)驅(qū)動(dòng)器是一種常見的電機(jī)驅(qū)動(dòng)裝置,可用于控制步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)。調(diào)整步進(jìn)電機(jī)驅(qū)動(dòng)器的撥碼開關(guān)可以改變其工作模式和參數(shù)設(shè)置,以滿足不同的應(yīng)用需求。下面是一個(gè)詳細(xì)解釋如何調(diào)整步進(jìn)電機(jī)驅(qū)動(dòng)器撥碼開關(guān)
2024-01-15 13:56:45730 ,還能輕松驅(qū)動(dòng)步進(jìn)電機(jī)。本文將詳細(xì)介紹Arduino驅(qū)動(dòng)步進(jìn)電機(jī)的原理、方法和應(yīng)用。 步進(jìn)電機(jī)基礎(chǔ)知識(shí) 1.1 步進(jìn)電機(jī)概述 步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換為機(jī)械位移的電動(dòng)機(jī)。與直流電機(jī)相比,步進(jìn)電機(jī)具有定位精度高、扭矩大、響應(yīng)速度快等
2024-01-14 16:37:37671 伺服電機(jī)是一種特殊的電機(jī),可以根據(jù)控制信號(hào)準(zhǔn)確地控制角度、速度和位置。伺服電機(jī)的最簡(jiǎn)單控制方法可以分為開環(huán)控制和閉環(huán)控制兩種。 開環(huán)控制:開環(huán)控制是指通過直接提供控制信號(hào),使伺服電機(jī)旋轉(zhuǎn)到所設(shè)
2024-01-14 14:40:27570 一、有源增益控制時(shí)鐘控制雙極性步進(jìn)電機(jī)驅(qū)動(dòng)器 主要特點(diǎn) 1.防失步和高效率 新AGC電機(jī)控制結(jié)構(gòu)提高了電機(jī)效率,同時(shí)降低了發(fā)熱量。ACDS無檢流電阻電流控制減少了對(duì)于PCB空間的要求。另外,高分辨率
2023-12-22 16:57:53141 
直流電機(jī)驅(qū)動(dòng)電路是一種將直流電源轉(zhuǎn)換為直流電機(jī)所需的電流和電壓的電路。它主要由電源模塊、電流控制模塊和速度控制模塊組成。這些模塊的功能和相互之間的關(guān)系是實(shí)現(xiàn)電機(jī)穩(wěn)定運(yùn)行的關(guān)鍵。 電源模塊 電源模塊
2023-12-20 17:11:51397 步進(jìn)電機(jī)的控制方法以及所需的控制信號(hào)。 步進(jìn)電機(jī)的控制方法主要分為開環(huán)控制和閉環(huán)控制兩種。 開環(huán)控制是指根據(jù)預(yù)定的電流和時(shí)間控制信號(hào)來驅(qū)動(dòng)步進(jìn)電機(jī),根據(jù)電流和時(shí)間的確定性,可以較精確地控制電機(jī)的角度和速度。開
2023-12-20 11:21:24760 伺服電機(jī)是一種高性能、高精度的電機(jī),廣泛應(yīng)用于自動(dòng)化控制系統(tǒng)中。要實(shí)現(xiàn)伺服電機(jī)的正常工作,就需要將其連接到適當(dāng)?shù)?b class="flag-6" style="color: red">驅(qū)動(dòng)器上。下面,將介紹伺服電機(jī)與驅(qū)動(dòng)器的連接方法。 一、接線準(zhǔn)備 確定伺服電機(jī)和驅(qū)動(dòng)
2023-12-20 09:47:321050 :本文應(yīng)用單片機(jī)、步進(jìn)電機(jī)驅(qū)動(dòng)芯片、字符型 LCD 和鍵盤陣列 構(gòu)建了集步進(jìn)電機(jī)控制器和驅(qū)動(dòng)器為一體的步進(jìn)電機(jī)控制系統(tǒng)。二維工作臺(tái)作為被控對(duì)象通過步進(jìn)電機(jī)驅(qū)動(dòng)滾珠絲桿在 X/Y 軸方向聯(lián)動(dòng)。文中討論
2023-12-18 09:24:24 1
1 無刷電機(jī)驅(qū)動(dòng)板是現(xiàn)代電子設(shè)備中常用的一種驅(qū)動(dòng)模塊,主要用于驅(qū)動(dòng)無刷電機(jī)。無刷電機(jī)具有高效、低噪音、長(zhǎng)壽命等優(yōu)點(diǎn),因此在許多領(lǐng)域得到廣泛應(yīng)用,如電動(dòng)自行車、電動(dòng)汽車、無人機(jī)等。本文將詳細(xì)介紹無刷電機(jī)
2023-12-14 11:22:351244 電機(jī)驅(qū)動(dòng)電路的工作原理 電機(jī)驅(qū)動(dòng)電路是控制電機(jī)運(yùn)行的核心部分,其工作原理涉及到電機(jī)的運(yùn)行和控制。本文將詳細(xì)介紹電機(jī)驅(qū)動(dòng)電路的工作原理,包括電路的組成、工作過程和重要參數(shù)。 一、電機(jī)驅(qū)動(dòng)電路的組成
2023-12-13 10:54:371527 將重點(diǎn)研究PWM技術(shù)的控制策略和實(shí)現(xiàn)方法,并討論其優(yōu)點(diǎn)和局限性。最后,我們將討論P(yáng)WM技術(shù)在電機(jī)控制中的未來發(fā)展和趨勢(shì)。 第一部分:介紹PWM技術(shù)的基本原理和工作原理 脈寬調(diào)制(PWM)是一種通過控制信號(hào)的占空比來實(shí)現(xiàn)模擬信號(hào)的數(shù)字調(diào)制技術(shù)。它
2023-12-07 15:48:30582 本文檔的目標(biāo)是提供關(guān)于使用STM32CubeMX驅(qū)動(dòng)低壓步進(jìn)電機(jī)驅(qū)動(dòng)器STSPIN220的詳盡信息和操作指南。通過本文檔,將深入了解如何利用STM32CubeMX來配置電機(jī)驅(qū)動(dòng)器,以及如何實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的精確控制和運(yùn)動(dòng)。
2023-12-01 15:25:01361 
CLN17 電機(jī)驅(qū)動(dòng)器是一款開源、緊湊、高性能的閉環(huán)步進(jìn)電機(jī)驅(qū)動(dòng)器,專為 NEMA17 外形尺寸電機(jī)設(shè)計(jì)。該驅(qū)動(dòng)器提供先進(jìn)的功能,如靜音和平穩(wěn)的運(yùn)動(dòng)、高精度的位置控制和節(jié)能功能,使其成為各種應(yīng)用的理想選擇,包括機(jī)器人、CNC 機(jī)床和 3D 打印機(jī)。
2023-11-20 10:03:27488 
電子發(fā)燒友網(wǎng)站提供《電機(jī)控制和驅(qū)動(dòng)設(shè)計(jì)解決方案.pdf》資料免費(fèi)下載
2023-11-17 10:43:577 電機(jī)控制器由于原來通過逆變橋調(diào)制輸出正弦波來驅(qū)動(dòng)電機(jī)的設(shè)備,變成了多種功能的集合體。集成式電機(jī)控制器包括:①配電回路:為集成控制器各部分提供配電,如TM接觸器、熔斷器、電空調(diào)回路供電、電除霜回路供電
2023-11-06 10:22:54544 
步進(jìn)系統(tǒng)=步進(jìn)驅(qū)動(dòng)器+步進(jìn)電機(jī)。步進(jìn)電機(jī)由步進(jìn)驅(qū)動(dòng)器來驅(qū)動(dòng),相當(dāng)于驅(qū)動(dòng)電源,且它受外部的脈沖信號(hào)和方向信號(hào)控制(這里舉例是西門子PLC輸出脈沖),進(jìn)而控制步進(jìn)電機(jī)的旋轉(zhuǎn)角度和速度。
2023-10-30 11:30:52933 
如何驅(qū)動(dòng)三相橋式電路控制無刷電機(jī)
2023-10-28 06:13:06
電子發(fā)燒友網(wǎng)站提供《采用FPGA驅(qū)動(dòng)GPS模塊和電子羅盤模塊的解決方法.pdf》資料免費(fèi)下載
2023-10-26 09:02:361 通過總線控制伺服電機(jī)時(shí),如何進(jìn)行回零(尋參考點(diǎn))控制?這里就CANOPEN伺服電機(jī)的回零控制方法分享給大家。
2023-10-23 11:42:201627 
有可以配合的產(chǎn)品?–是否有高電壓大電流的電機(jī)驅(qū)動(dòng)芯片?–我們大量使用電磁閥和有刷電機(jī),驅(qū)動(dòng)方案很多但控制效果不夠好,Trinamic有這類產(chǎn)品嗎?原Maxim(美信
2023-10-21 08:11:25566 
電子發(fā)燒友網(wǎng)站提供《L298N 電機(jī)驅(qū)動(dòng)模塊--配套程序.zip》資料免費(fèi)下載
2023-10-18 09:43:021 電子發(fā)燒友網(wǎng)站提供《L298N 電機(jī)驅(qū)動(dòng)模塊用戶手冊(cè)與原理圖.zip》資料免費(fèi)下載
2023-10-18 09:42:084 可以通過串口直接控制步進(jìn)電機(jī)驅(qū)動(dòng)器嗎
2023-10-18 07:20:07
電子發(fā)燒友網(wǎng)站提供《CEPARK L298N(帶光耦)電機(jī)驅(qū)動(dòng)模塊配套程序.zip》資料免費(fèi)下載
2023-10-13 11:17:341 電子發(fā)燒友網(wǎng)站提供《CEPARK L298N(帶光耦)電機(jī)驅(qū)動(dòng)模塊原理圖.pdf》資料免費(fèi)下載
2023-10-13 10:47:593 電子發(fā)燒友網(wǎng)站提供《CEPARK-L298N電機(jī)驅(qū)動(dòng)模塊元件清單.pdf》資料免費(fèi)下載
2023-10-13 10:43:070 為什么步進(jìn)電機(jī)驅(qū)動(dòng)要引入細(xì)分控制
2023-10-10 07:09:52
電子發(fā)燒友網(wǎng)站提供《單片機(jī)電機(jī)控制系統(tǒng)之H橋式電機(jī)驅(qū)動(dòng)電路原理.doc》資料免費(fèi)下載
2023-10-09 15:50:5412 伺服驅(qū)動(dòng)器中可以集成多少種電機(jī)驅(qū)動(dòng)控制電路?
2023-10-08 07:07:48
電機(jī)控制器,控制動(dòng)力電源與驅(qū)動(dòng)電機(jī)之間能量傳輸?shù)难b置,由控制信號(hào)接口電路、驅(qū)動(dòng)電機(jī)控制電路和驅(qū)動(dòng)電路組成。 在電動(dòng)車輛中,電機(jī)控制器的功能是根據(jù)檔位、油門、剎車等指令,將動(dòng)力蓄電池所存儲(chǔ)的電能
2023-09-25 18:01:411271 
驅(qū)動(dòng)無刷控制電機(jī)最少幾個(gè)定時(shí)器
2023-09-25 06:26:43
STEVAL-IPMM15B 是一種緊湊型電機(jī)驅(qū)動(dòng)電源板,配備 SLLIMM(小型低損耗智能成型模塊)第 2 系列模塊第 2 系列 N 溝道超結(jié) MDmesh? DM2 快速恢復(fù)二極管
2023-09-13 07:17:29
STEVAL-IPM10B 是一種基于 SLLIMM?(小型低損耗智能成型模塊)第 2 系列模塊(STGIB10CH60TS-L)的緊湊型電機(jī)驅(qū)動(dòng)電源板。該產(chǎn)品為驅(qū)動(dòng)大功率電機(jī)提供了一種經(jīng)濟(jì)實(shí)惠且
2023-09-13 06:26:36
STEVAL-IPM15B 是一種基于 SLLIMM?(小型低損耗智能成型模塊)第 2 系列模塊(STGIB15CH60TS-L)的緊湊型電機(jī)驅(qū)動(dòng)電源板。該產(chǎn)品為驅(qū)動(dòng)大功率電機(jī)提供了一種經(jīng)濟(jì)實(shí)惠且
2023-09-13 06:11:12
STEVAL-IPM10F 是一種基于 SLLIMM?(小型低損耗智能成型模塊)第 2 系列模塊(STGIF10CH60TS-L)的緊湊型電機(jī)驅(qū)動(dòng)電源板。該產(chǎn)品為驅(qū)動(dòng)大功率電機(jī)提供了一種經(jīng)濟(jì)實(shí)惠且
2023-09-13 06:06:11
香蕉派BPI-FSM8191D伺服電機(jī)控制器是香蕉派開源社區(qū)與峰岹科技合作打造的一款工業(yè)級(jí)伺服電機(jī)控制產(chǎn)品。是一款應(yīng)用于驅(qū)動(dòng)旋轉(zhuǎn)伺服電機(jī),直線伺服電機(jī)以及力矩電機(jī)的伺服模塊,在實(shí)際應(yīng)用中,由主控板
2023-09-04 09:16:12
直流有刷電機(jī)驅(qū)動(dòng)電路 直流有刷電機(jī)驅(qū)動(dòng)電路是由電子技術(shù)發(fā)展而來的一種現(xiàn)代化電氣控制方式,其能夠直接地控制電機(jī)的輸出轉(zhuǎn)速和扭矩等參數(shù),具有高效、可靠、精準(zhǔn)等優(yōu)點(diǎn)。本文將介紹直流有刷電機(jī)驅(qū)動(dòng)電路
2023-08-29 10:06:471411 雙電機(jī)驅(qū)動(dòng)是指在一個(gè)系統(tǒng)中安裝了兩個(gè)電機(jī),并采取不同方案進(jìn)行驅(qū)動(dòng),從而達(dá)到更高的效率和更好的控制。雙電機(jī)驅(qū)動(dòng)的原理與單電機(jī)驅(qū)動(dòng)相同,只是多了一組電機(jī)和控制器。雙電機(jī)驅(qū)動(dòng)的優(yōu)點(diǎn)在于可以實(shí)現(xiàn)更高的功率、更高的效率和更好的控制。
2023-08-28 11:36:361463 
步進(jìn)系統(tǒng)=步進(jìn)驅(qū)動(dòng)器+步進(jìn)電機(jī)。步進(jìn)電機(jī)由步進(jìn)驅(qū)動(dòng)器來驅(qū)動(dòng),相當(dāng)于驅(qū)動(dòng)電源,且它受外部的脈沖信號(hào)和方向信號(hào)控制(這里舉例是西門子PLC輸出脈沖),進(jìn)而控制步進(jìn)電機(jī)的旋轉(zhuǎn)角度和速度。
2023-08-25 11:15:10649 
在沒有霍爾傳感器的情況下,可以使用傳感器無刷電機(jī)控制(Sensorless BLDC Control)方法來控制BLDC電機(jī)。這種方法主要基于電機(jī)的反電勢(shì)來確定電機(jī)的位置和轉(zhuǎn)速,并通過適當(dāng)?shù)?b class="flag-6" style="color: red">控制策略來驅(qū)動(dòng)電機(jī)。
2023-08-16 15:46:511559 在大多數(shù)電子項(xiàng)目或機(jī)器人應(yīng)用中,電機(jī)驅(qū)動(dòng)器和電機(jī)控制器起著非常重要的作用。
2023-08-16 10:20:212734 
電機(jī)控制器的定義是:控制動(dòng)力電源與驅(qū)動(dòng)電機(jī)之間能量傳輸?shù)难b置,由控制信號(hào)接口電路、驅(qū)動(dòng)電機(jī)控制電路和驅(qū)動(dòng)電路組成。
2023-08-11 15:06:13890 
請(qǐng)問蜂鳥系列有沒有相關(guān)控制永磁同步電機(jī)的驅(qū)動(dòng)板,這樣從而燒錄至驅(qū)動(dòng)板中,控制永磁同步電機(jī)
2023-08-11 13:40:10
2023’(線上)電機(jī)驅(qū)動(dòng)與控制技術(shù)研討會(huì)正式開啟報(bào)名!8月12日,期待您的參與! 尊敬的各位電機(jī)驅(qū)動(dòng)與控制技術(shù)領(lǐng)域的專家、學(xué)者和工程師們: 我們誠(chéng)摯地邀請(qǐng)您參加即將于2023年舉辦的“(線上)電機(jī)
2023-08-02 11:21:41576 電動(dòng)汽車驅(qū)動(dòng)電機(jī)控制器概述 電機(jī)控制器,控制動(dòng)力電源與驅(qū)動(dòng)電機(jī)之間能量傳輸?shù)难b置,由控制信號(hào)接口電路、驅(qū)動(dòng)電機(jī)控制電路和驅(qū)動(dòng)電路組成。 在電動(dòng)車輛中,電機(jī)控制器的功能是根據(jù)檔位、油門、剎車等指令
2023-07-28 10:55:341533 
在本節(jié)中,我們來完成控制模塊的電路設(shè)計(jì)。首先我們需要對(duì)控制模塊做一下簡(jiǎn)單的功能分析,也就是說我們先要了解控制模塊都具有哪些功能,然后再逐步的完成這些功能。
2023-07-26 14:33:571795 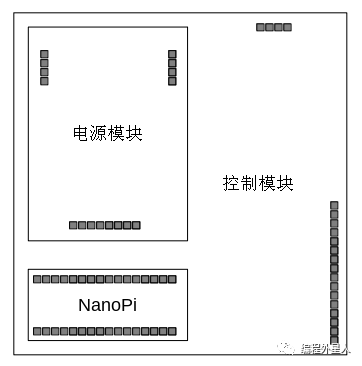
電子發(fā)燒友網(wǎng)站提供《有刷電機(jī)及其驅(qū)動(dòng)方法.pdf》資料免費(fèi)下載
2023-07-25 09:56:021 凌鷗創(chuàng)芯攜多款新品及整體解決方案亮相,與行業(yè)翹楚共同探討未來技術(shù)的創(chuàng)新發(fā)展。 電控方案研發(fā)總監(jiān)李自愿在此次活動(dòng)論壇上關(guān)于《創(chuàng)新驅(qū)動(dòng):高效、開放的電機(jī)控制開發(fā)環(huán)境與軟件生態(tài)》發(fā)表演講,引起現(xiàn)場(chǎng)的熱烈
2023-07-21 16:41:471428 
用于電機(jī)控制的低壓電源模塊
2023-06-26 20:15:340 單片機(jī)驅(qū)動(dòng)步進(jìn)電機(jī)的方法
2023-06-14 12:56:29
如何在24小時(shí)之內(nèi)完成伺服控制器設(shè)計(jì)?妮姐和豆豆就使用了一個(gè)“神器”,真的快速地完成了——這個(gè)“神器”就是TMC4671,有多神,先賣個(gè)關(guān)子,大家繼續(xù)往下看。電機(jī)控制最復(fù)雜的是算法電機(jī)控制,用簡(jiǎn)單
2023-06-12 10:55:38689 
如何在24小時(shí)之內(nèi)完成伺服控制器設(shè)計(jì)?妮姐和豆豆就使用了一個(gè) “神器” ,真的快速地完成了—— 這個(gè)“神器”就是TMC4671,有多神,先賣個(gè)關(guān)子,大家繼續(xù)往下看。 電機(jī)控制最復(fù)雜的是算法 電機(jī)控制
2023-06-07 20:45:02399 
空間矢量調(diào)制 (SVM) 是感應(yīng)電機(jī)和永磁同步電機(jī) (PMSM) 磁場(chǎng)定向控制的常用方法。
空間矢量調(diào)制負(fù)責(zé)生成脈寬調(diào)制信號(hào)以控制逆變器的開關(guān),由此產(chǎn)生所需的調(diào)制電壓,以所需的速度或轉(zhuǎn)矩驅(qū)動(dòng)電機(jī)。
2023-05-30 16:16:491396 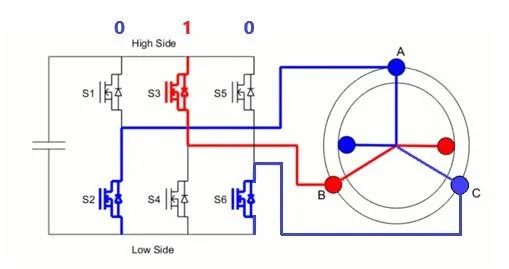
Body Interaction 2 (BI2) 振動(dòng)器開發(fā)板最多可以驅(qū)動(dòng) 3 個(gè)電機(jī)。
- 用于電機(jī)運(yùn)動(dòng)控制的 MPU9250(加速度計(jì)、陀螺儀)
- 鋰聚合物電池充電
- 1 個(gè) WS2812B LED
-
有了這個(gè)電路板,可以更容易地構(gòu)建用于驅(qū)動(dòng)振動(dòng)器電機(jī)的定制特定硬件
2023-05-22 07:10:47
用說明
驅(qū)動(dòng)器可以讓步進(jìn)電機(jī)的控制更加精確,具體信息參考說明書:
說明書
需要注意的是,即使你的驅(qū)動(dòng)器是DM520之類的,操作都是完全相同的,博主在DM520上也驗(yàn)證過,是可以的。
2023-05-16 15:53:013 、傳送帶、編碼器電機(jī)、L298N驅(qū)動(dòng)模塊、蜂鳴器、OLED顯示屏、LED燈一起構(gòu)成滑塊運(yùn)動(dòng)狀態(tài)與電機(jī)速度分配的雙閉
環(huán)調(diào)速系統(tǒng)。單片機(jī)輸出占空比可變的PWM波給電機(jī)驅(qū)動(dòng)模塊,控制電機(jī)的速度,從而實(shí)現(xiàn)了PID控制器對(duì)電機(jī)的轉(zhuǎn)速控制。通過編碼器反饋電機(jī)的速
度,PID的位置環(huán)準(zhǔn)確控制滑塊移動(dòng)的位
2023-05-16 15:49:235 298N是一款很常用的電機(jī)驅(qū)動(dòng),但是最近發(fā)現(xiàn)有幾個(gè)學(xué)弟學(xué)妹學(xué)的時(shí)候接線錯(cuò)了,給他們講解了一下,順手就在這說一下使
用方法,
2023-05-16 15:17:181 在這里介紹一下用51單片機(jī)驅(qū)動(dòng)步進(jìn)電機(jī)的方法。
這款步進(jìn)電機(jī)的驅(qū)動(dòng)電壓12V,步進(jìn)角為 7.5度 . 一圈 360 度 , 需要 48 個(gè)脈沖完成!!!
該步進(jìn)電機(jī)有6根引線,排列次序如下
2023-05-16 14:52:462 TMC2209 SilentStepStick 是一款用于兩相雙極步進(jìn)電機(jī)的步進(jìn)/方向驅(qū)動(dòng)器,具有高達(dá) 2.8A 峰峰值和 2ARMS 的電流。它可以在 1 至 1/256 步進(jìn)模式下驅(qū)動(dòng)
2023-05-16 14:45:318 本章主要使用CH32V103進(jìn)行步進(jìn)電機(jī)的驅(qū)動(dòng),需要用到ULN2003步進(jìn)電機(jī)驅(qū)動(dòng)板和5V步進(jìn)電機(jī)(四相五線),此處使用GPIO進(jìn)行步進(jìn)電機(jī)驅(qū)動(dòng)控制。 1、GPIO簡(jiǎn)介及相關(guān)函數(shù)介紹關(guān)于GPIO
2023-05-10 16:18:34
電機(jī)驅(qū)動(dòng)模塊有哪些 電機(jī)的驅(qū)動(dòng)模塊通常有晶體管模塊、晶閘管(可控硅)模塊、IGBT模塊,當(dāng)然對(duì)于小型微特電機(jī)也用集成驅(qū)動(dòng)模塊。 驅(qū)動(dòng)電路的基本任務(wù),就是將信息電子電路傳來的信號(hào)按照其控制目標(biāo)的要求
2023-05-08 14:50:491845 步進(jìn)電機(jī)驅(qū)動(dòng)模塊 TMCM-1316“StepRocker伺服”是一個(gè)單軸電機(jī)控制器/驅(qū)動(dòng)板,用于2相雙極步進(jìn)電機(jī),包括帶有外部編碼器的閉環(huán)操作。它具有由 TMC4361 和 TMC5160 以及
2023-05-08 14:45:20850 用于電機(jī)控制的低壓電源模塊
2023-05-06 18:29:240 得分享的。
我做的工作是束測(cè),有很多部件需要電機(jī)或氣缸驅(qū)動(dòng)著運(yùn)動(dòng),比如看束流光斑的Flag(需要看的時(shí)候插進(jìn)去擋住束流,不看的時(shí)候提出來),能量狹縫(一條縫攔截束流,需要能控制縫的寬度和位置),
刮束器(刮掉一部分束
2023-05-06 14:22:073 變頻器控制電機(jī)的方式主要分為VF控制模式、開環(huán)矢量控制模式(SVC)、閉環(huán)矢量控制(VC)以及直接轉(zhuǎn)矩控制(DTC)等幾種模式。 1 V/F控制 V/F控制是永磁同步電機(jī)最簡(jiǎn)單的一種控制方法,易于
2023-05-05 14:59:400 步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)
所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過每一個(gè)
2023-05-05 14:16:034 驅(qū)動(dòng)器有如下幾個(gè)端口:X1、X2、X3、X4、X5、X6、XA、XBX1 X2 X3 X4 X5 X6伺服電機(jī)的四種控制模式:1.位置控制模式 2.速度控制模式 3.轉(zhuǎn)矩控制模式4.全閉環(huán)控制模式 PR
2023-05-05 11:36:140 項(xiàng)目目標(biāo)
實(shí)現(xiàn)電機(jī)最常使用的兩個(gè)功能,轉(zhuǎn)速控制和位置控制 使用PID閉環(huán)控制(控制線性系統(tǒng)最簡(jiǎn)單快捷的控制方法)
硬件搭建
為了實(shí)現(xiàn)控制電機(jī)轉(zhuǎn)動(dòng)和閉環(huán)控制 需要: 1. 電機(jī)(廢話) 2. 編碼器(霍爾編碼器或者光電編碼器均可) 3. 電機(jī)驅(qū)動(dòng)(這里選的是l298n模塊)
2023-05-05 11:29:193 三相電機(jī)控制高壓逆變器模塊
2023-04-28 18:59:361 生產(chǎn)流水線。
2. 平面集成方法:平面集成是針對(duì)某個(gè)生產(chǎn)環(huán)節(jié)或者某個(gè)系統(tǒng)進(jìn)行的集成,把不同的單元或者工具結(jié)合在一起完成生產(chǎn)或者管理任務(wù)。該方法采用 IoT、云計(jì)算、大數(shù)據(jù)、物聯(lián)網(wǎng)等技術(shù),通過數(shù)據(jù)交換和處理,實(shí)現(xiàn)了生產(chǎn)過程的自動(dòng)化和信息化。
2023-04-25 15:24:412085 這次調(diào)試MPC5744的PWM模塊,很順利,沒有踩坑,記錄下給需要的猿友。 PWM是控制電機(jī)非常重要的模塊,用來驅(qū)動(dòng)功率器件,完成電機(jī)的旋轉(zhuǎn)和控制,可以控制ACIM,BLDC, PMSM, BDC,SRM,以及步進(jìn)電機(jī)等。
2023-04-20 14:15:341217 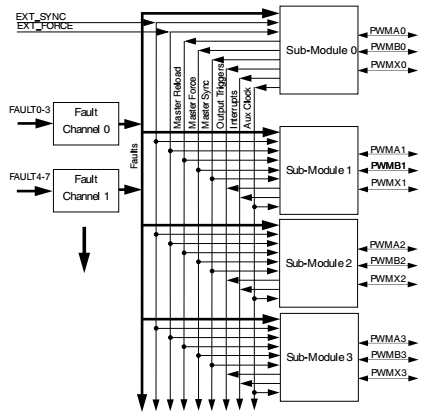
高速PCB設(shè)計(jì)是一個(gè)相對(duì)復(fù)雜的過程,由于高速PCB設(shè)計(jì)中需要充分考慮信號(hào)、阻抗、傳輸線等眾多技術(shù)要素,常常成為PCB設(shè)計(jì)初學(xué)者的一大難點(diǎn),本文提供的幾個(gè)關(guān)于高速PCB設(shè)計(jì)的基本概念及技術(shù)要點(diǎn)
2023-04-19 16:05:28
幾款大功率精確電流控制的H橋電機(jī)驅(qū)動(dòng)芯片
2023-04-07 14:53:193908 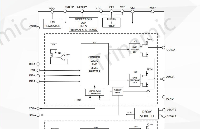
利用TB6612模塊控制直流電機(jī),TB6612模塊的基本使用,在我的博客上面寫有。先看看 里面的控制。再次簡(jiǎn)單說一下。
(1)一個(gè)TB6612模塊,可以驅(qū)動(dòng)兩個(gè)直流電機(jī)。 (2)TB6612驅(qū)動(dòng)
2023-04-03 15:16:190 驅(qū)動(dòng)直流電機(jī)是基于微控制器設(shè)計(jì)的一種非常常見的應(yīng)用,電機(jī)驅(qū)動(dòng)器的選擇可能非常重要。
如果您的唯一要求是在不考慮控制速度或方向的情況下打開和關(guān)閉電機(jī),那么繼電器或 MOSFET就可以解決問題。但在
2023-04-03 15:14:570 一、為什么不能直接用單片機(jī)IO口驅(qū)動(dòng)電機(jī),要用電機(jī)驅(qū)動(dòng)模塊? 二、使用步驟: 1.L298n各引腳作用: 2.推薦的供電方式: 3.推薦的控制方式:
為什么不能直接用單片機(jī)IO口驅(qū)動(dòng)電機(jī),要用電機(jī)
2023-03-31 13:46:080 樹莓派控制PWM控制電機(jī)轉(zhuǎn)速 一、硬件 樹莓派 12V直流電機(jī) L298N電機(jī)驅(qū)動(dòng)器 220V轉(zhuǎn)12V變壓器 二、連線 樹莓派與L298N需要共地 L298N驅(qū)動(dòng)模塊 樹莓派接線 三、樹莓
2023-03-31 10:59:191 直流電機(jī)屬于大功率器件,GPIO無法直接驅(qū)動(dòng),需要電機(jī)驅(qū)動(dòng)模塊配合,才能驅(qū)動(dòng)直流電機(jī). TB6612可以驅(qū)動(dòng)2個(gè)直流電機(jī)。由IN1,IN2控制電機(jī)旋轉(zhuǎn)方向,由PWM控制電機(jī)旋轉(zhuǎn)速度。核心代碼還是
2023-03-31 10:02:059 如果你打算用直流
電機(jī)建造一個(gè)機(jī)器人,那么你最終會(huì)了解到,如果你想讓它朝某個(gè)方向移動(dòng),你需要同時(shí)
控制電機(jī)的速度和
方向。最好的
方法之一是使用 L293D
電機(jī)驅(qū)動(dòng)器 IC,因?yàn)樗阋恕⒁子?/div>
2023-03-30 11:11:572 、按鍵控制模塊、電機(jī)驅(qū)動(dòng)模塊、測(cè)速環(huán)節(jié)和直流電機(jī)組成,其中電機(jī)驅(qū)動(dòng)模塊采用L298N芯片實(shí)現(xiàn),液晶顯示模塊采
用LCD1602實(shí)現(xiàn),穩(wěn)壓電路模塊采用7805芯片實(shí)現(xiàn)。采用模糊控制(FuzzyControl)算法對(duì)直流電機(jī)轉(zhuǎn)速進(jìn)行閉環(huán)控制。
通過調(diào)試,實(shí)現(xiàn)了串口通信設(shè)置目標(biāo)轉(zhuǎn)速、手
2023-03-30 10:50:300 一、MCPWM簡(jiǎn)介 MCPWM中文名是電機(jī)控制脈寬調(diào)制器 (Motor Control Pulse Width Modulator ),是一款多功能 PWM 發(fā)生器,包含各種子模塊,使其成為
2023-03-27 16:40:44
許多不同的控制算法都被用以提供對(duì)于BLDC電機(jī)的控制。典型做法是,將功率晶體管用作線性穩(wěn)壓器來控制電機(jī)電壓。當(dāng)驅(qū)動(dòng)高功率電機(jī)時(shí),這種方法并不實(shí)用。
2023-03-27 09:31:22772 步進(jìn)電機(jī)控制器是一種專門用于控制步進(jìn)電機(jī)的設(shè)備,可以用來控制步進(jìn)電機(jī)的轉(zhuǎn)速和方向。步進(jìn)電機(jī)控制器通常包括一個(gè)驅(qū)動(dòng)電路板和一個(gè)控制板,驅(qū)動(dòng)電路板用于提供電源和輸出脈沖信號(hào),控制板則用于控制步進(jìn)電機(jī)的運(yùn)行。
步進(jìn)電機(jī)控制器的應(yīng)用設(shè)置一般包括以下幾個(gè)方面:
2023-03-26 22:30:201182 電機(jī)速度控制的方法有很多種,下面列舉幾種常見的方法:
1.?電壓調(diào)節(jié)法:
通過改變電機(jī)繞組的電壓來改變轉(zhuǎn)速,可以調(diào)整電機(jī)轉(zhuǎn)速但效率不高,控制精度低,一般不采用。
2023-03-26 22:16:423399 電機(jī)驅(qū)動(dòng)器及控制器?DIP-8
2023-03-24 16:43:00
用于步進(jìn)電機(jī)控制的PWM斬波型雙極驅(qū)動(dòng)芯片
2023-03-24 15:08:57
、能量回收、熱管理功能等。 控制器的組成 控制器主要由主控板、驅(qū)動(dòng)板、IGBT、電流傳感器、支撐電容、被動(dòng)泄放電阻、銅排、散熱器、外殼、接插件、線束等部分組成。 主控板是電機(jī)控制器的控制核心。主控板
2023-03-23 15:45:33
電機(jī)控制是指對(duì)電機(jī)的啟動(dòng)、調(diào)速(加速、減速)、運(yùn)轉(zhuǎn)方向和停止進(jìn)行的控制,不同類型的電機(jī)有著不同的工作原理和控制方法。一、無刷電機(jī)無刷電機(jī)是由電機(jī)主體和電機(jī)驅(qū)動(dòng)板組成的一種沒有電刷和換向器的機(jī)電一體化
2023-03-23 15:43:18436 
步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào)時(shí)就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一
個(gè)固定的角度(稱為“步距角”),其旋轉(zhuǎn)以固定的角度運(yùn)行。可以通過控制脈沖個(gè)數(shù)來控制
2023-03-23 10:34:222 原理的功課,以及用另一種控制電機(jī)的方法----定時(shí)器輸出比較
在我之前提到過的步進(jìn)電機(jī)的工作原理中,我們知道電機(jī)定子的轉(zhuǎn)動(dòng)是通過不同線圈產(chǎn)生的磁場(chǎng)進(jìn)而驅(qū)動(dòng)電機(jī)轉(zhuǎn)動(dòng)一定步距角來實(shí)現(xiàn)的,但是市面上的電機(jī)步距角都是出廠時(shí)就已經(jīng)配置好
2023-03-23 10:28:020 已全部加載完成
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論