") 基于STM32CUBEMX驅(qū)動低壓步進器電機驅(qū)動器STSPIN220(2)----驅(qū)動STSPIN220
基于STM32CUBEMX驅(qū)動低壓步進器電機驅(qū)動器STSPIN220(2)----驅(qū)動STSPIN220
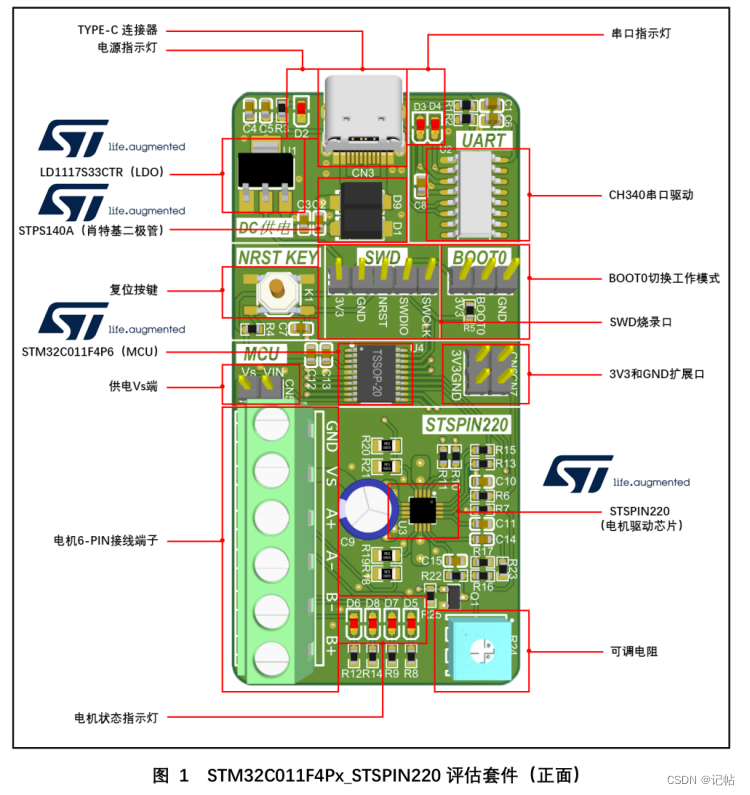
套件概述
本文檔的目標是提供關于使用STM32CubeMX驅(qū)動低壓步進電機驅(qū)動器STSPIN220的詳盡信息和操作指南。通過本文檔,將深入了解如何利用STM32CubeMX來配置電機驅(qū)動器,以及如何實現(xiàn)對步進電機的精確控制和運動。
最近在弄ST的課程,需要樣片的可以加群申請:615061293 。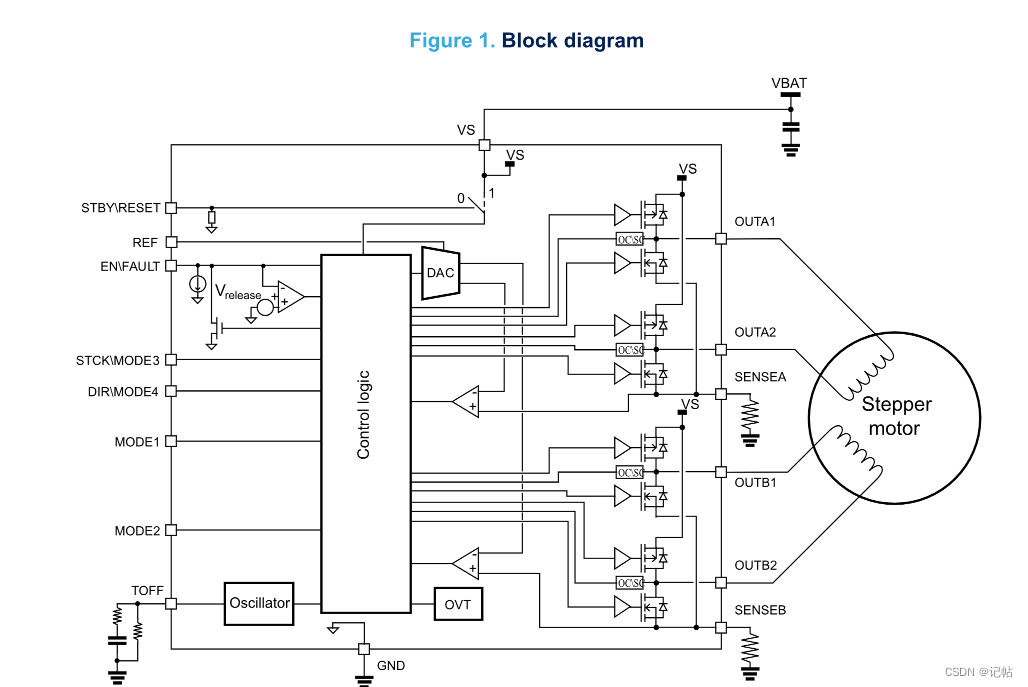
樣品申請
https://www.wjx.top/vm/PpC1kRR.aspx
視頻教學
https://www.bilibili.com/video/BV1Ju4y1R7mA/
完整代碼下載
https://download.csdn.net/download/qq_24312945/88184732
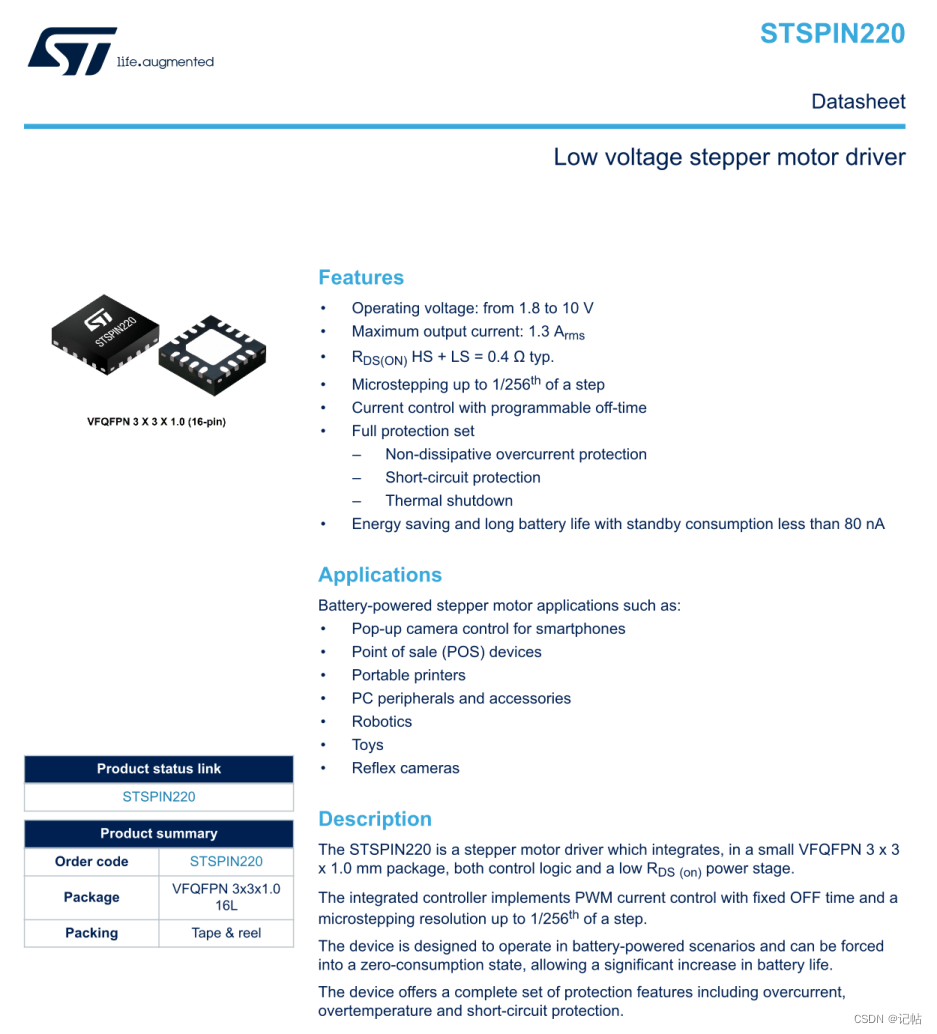
STSPIN220描述
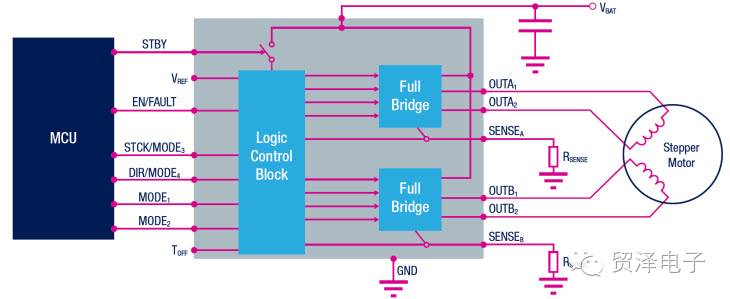
STSPIN220是一款專為步進電機設計的高度集成型芯片,其獨特的特性和功能使其在小型VFQFPN 3 x 3 x 1.0 mm封裝中融合了控制邏輯和低RDS(on)功率級,為電機控制領域提供了出色的解決方案。
集成的控制邏輯和低RDS(on)功率級: STSPIN220集成了高效的控制邏輯和低RDS(on)功率級,這意味著它能夠以高效的方式驅(qū)動步進電機,從而實現(xiàn)更低的能耗和更高的性能。
微步進分辨率和PWM電流控制: 該芯片內(nèi)置的控制器充分利用了固定關斷時間和高達1/256步進的微步進分辨率,以實現(xiàn)精準的PWM電流控制。這意味著可以實現(xiàn)更加精細的步進電機運動控制,從而滿足不同應用的需求。
電池供電和零功耗模式: STSPIN220的設計兼顧了電池供電場景,可以強制進入零功耗狀態(tài),從而在電池供電情況下延長電池的使用壽命。這在移動設備和便攜式應用中尤為有用。
全套保護機制: 該芯片提供了全面的保護機制,包括過電流保護、過溫保護和短路保護等。這些保護機制能夠確保步進電機在各種異常情況下保持穩(wěn)定和安全運行,有效保護系統(tǒng)的可靠性。
綜上所述,STSPIN220作為一款專為步進電機設計的芯片,在小型封裝中融合了多種先進功能。它通過集成的控制邏輯、微步進分辨率和全套保護機制,為步進電機應用提供了高效、精確和安全的驅(qū)動解決方案,適用于各種應用領域,從工業(yè)自動化到便攜式設備。無論是節(jié)能、精密控制還是延長電池壽命,STSPIN220都能夠為項目帶來可靠的性能和出色的效果。
STSPIN220所有功能
STSPIN220作為一款專為步進電機而設計的芯片,具備多項卓越特性,為電機控制領域提供了高度可靠的解決方案:
寬范圍工作電壓: STSPIN220支持廣泛的工作電壓范圍,從1.8V至10V,這意味著它適用于各種不同電源供應場景,從低電壓到標準電壓范圍。
高輸出電流能力: 最大輸出電流1.3 Arms使STSPIN220能夠驅(qū)動具有較高電流需求的步進電機,確保電機能夠以足夠的力量進行運動。
低RDS(ON)值: 芯片的高低側(cè)電流傳感器及MOSFET具有低RDS(ON)值,僅為0.4Ω(典型值)。這將減少功耗和熱量損耗,提升電機的效率和性能。
精細的微步進控制: STSPIN220能夠?qū)崿F(xiàn)每次步進高達1/256的微步進,這使得步進電機的運動變得更加平滑和精準,適用于需要高精度控制的應用。
電流控制通過可編程關斷時間: 芯片利用可編程關斷時間來實現(xiàn)電流控制,這可以根據(jù)應用需求調(diào)整電機的電流,以獲得最佳性能。
全套保護機制: STSPIN220提供全面的保護機制,包括非耗散性過電流保護、短路保護和熱關斷。這些保護機制確保在異常情況下電機驅(qū)動器和步進電機都能夠安全運行。
極低待機耗電量: 該芯片的待機模式耗電量不足80 nA,這使得它非常適合在需要節(jié)能和延長電池壽命的應用中使用。
綜上所述,STSPIN220以其廣泛的工作電壓范圍、高輸出電流能力、微步進控制、電流控制方式、保護機制以及低待機耗電量,為步進電機驅(qū)動提供了一種先進的解決方案。無論是在性能、效率還是電源管理方面,STSPIN220都為步進電機應用帶來了出色的表現(xiàn)和可靠性。
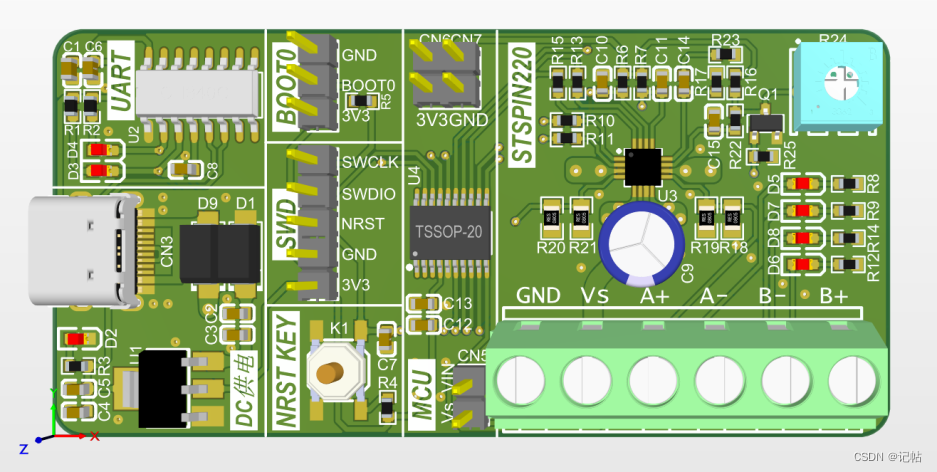
基礎配置
對于小電流電機,R10改為10K以下,這里設置為5.1k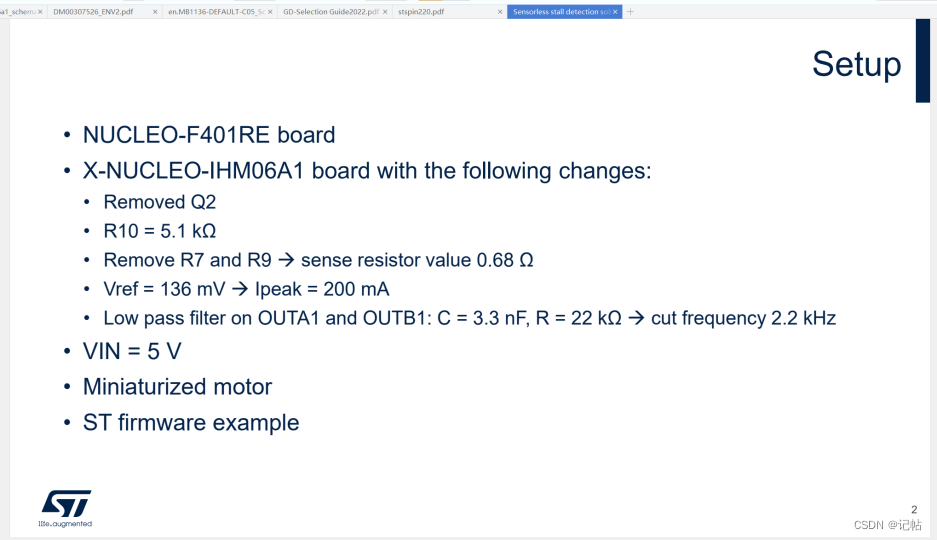
REF
REF為參考電壓,最大范圍是-0.3-1V
電流配置
下圖有配置公式。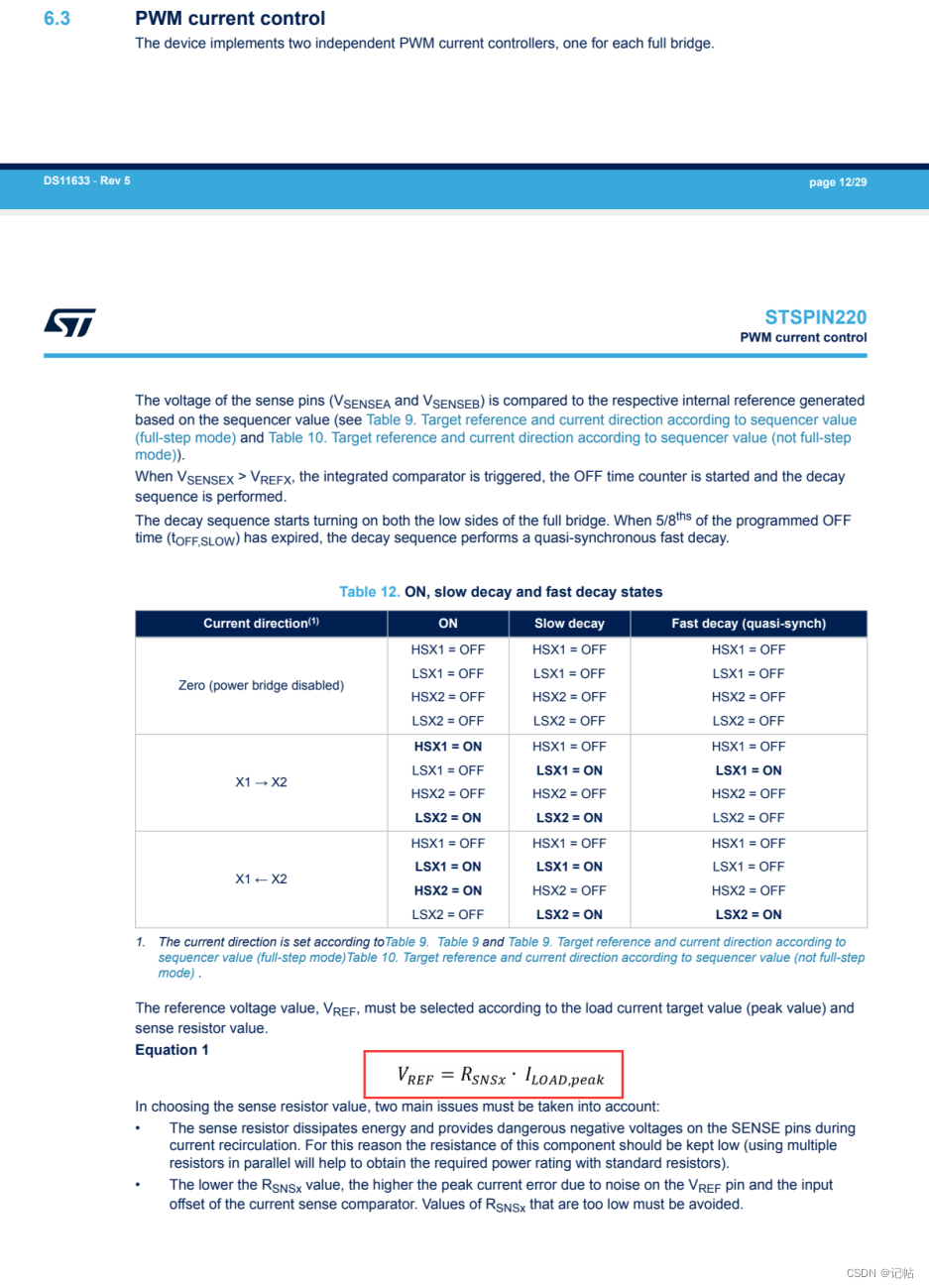
可以看到R_SNS為0.68R,若設置200mA,那么V_REF=0.68R*200MA=136mV,和上面說的V_REF=136mV相符。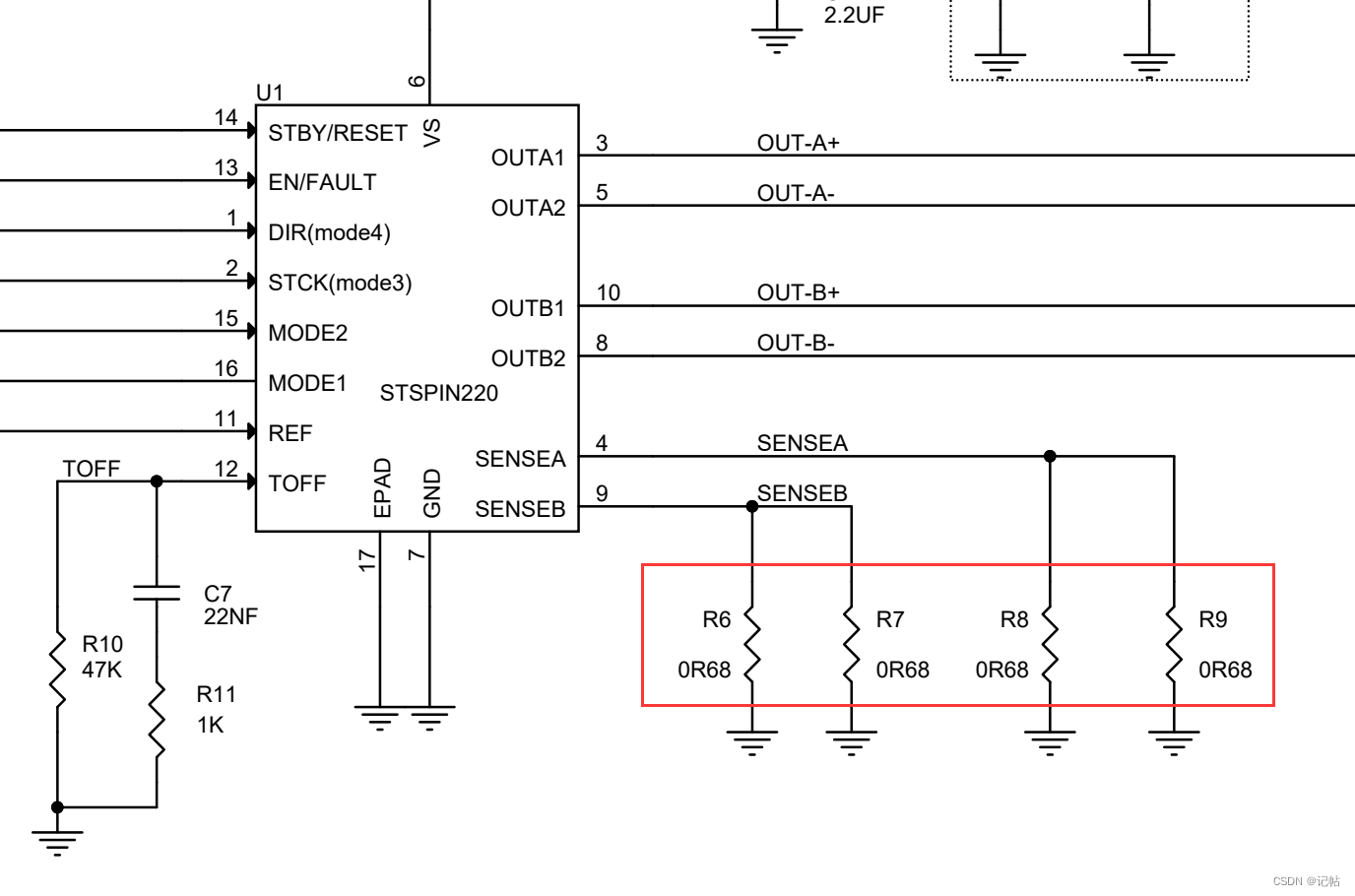
細分配置
STSPIN最高提供了256細分的操作,具體配置如下所示。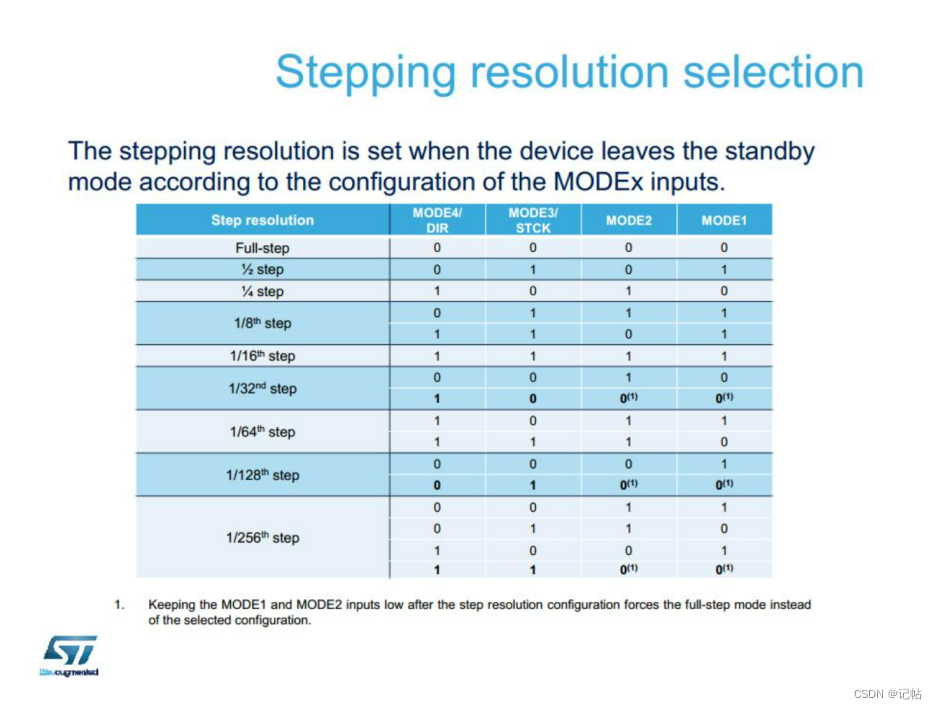
IO配置
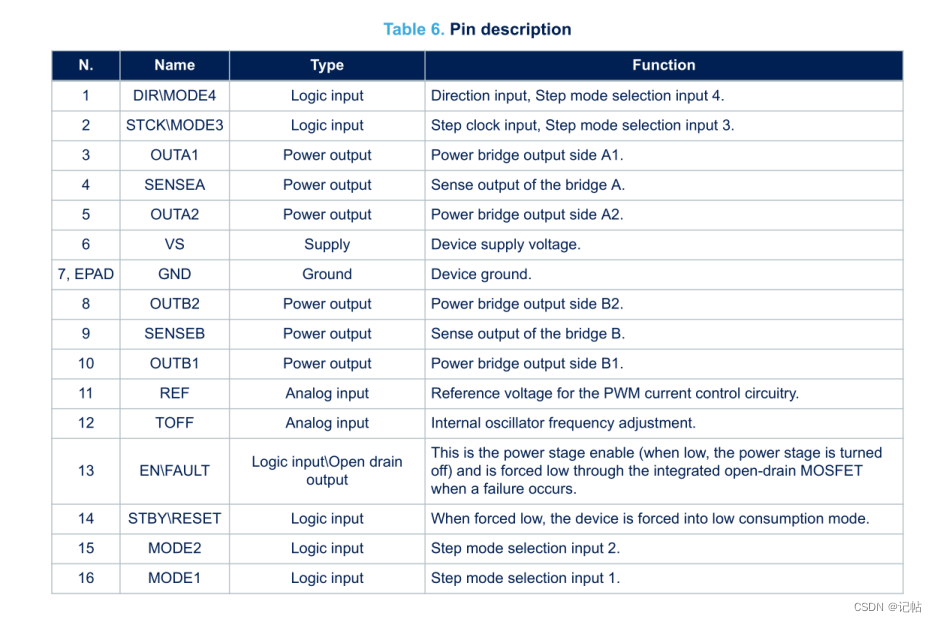
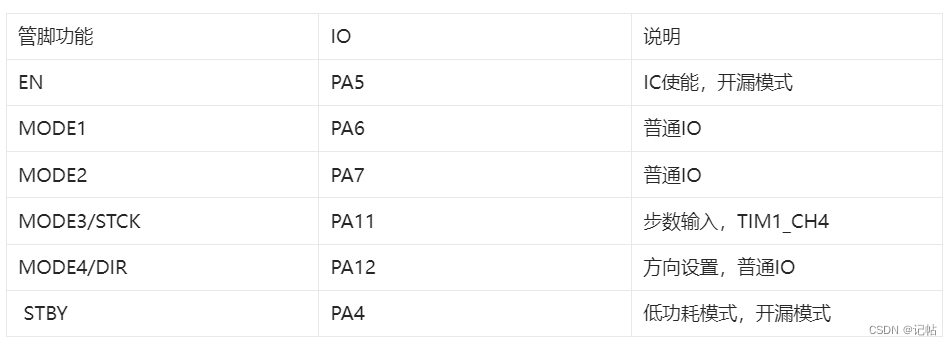
查看原理圖,主要有6個IO需要配置。
分別是STBY、EN、MODE1、MODE2、MODE3、MODE4。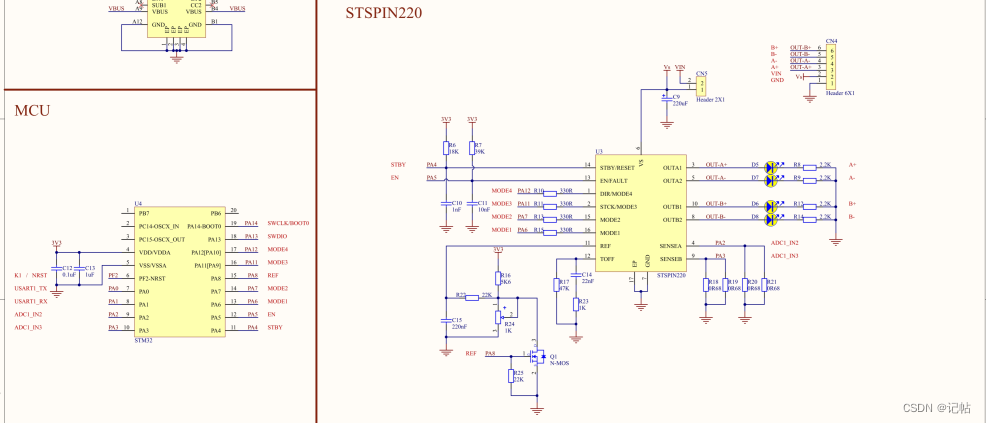
IO說明如下所示。
其中ENFAULT為使能管腳,需要配置為開漏輸出。
使能高電平時候STSPIN220正常工作。
下圖為設置細分示意圖。STBY是STSPIN220驅(qū)動器中的一種狀態(tài),表示待機狀態(tài)(Standby)。在待機狀態(tài)下,驅(qū)動器可能會降低功耗,停止執(zhí)行步進操作,以便在不需要進行步進電機運動時節(jié)省能源。當驅(qū)動器從待機狀態(tài)退出時,會獲取MODE輸入的值。需要注意的是MODE1和MODE2都為低電平時候強制為全步模式。
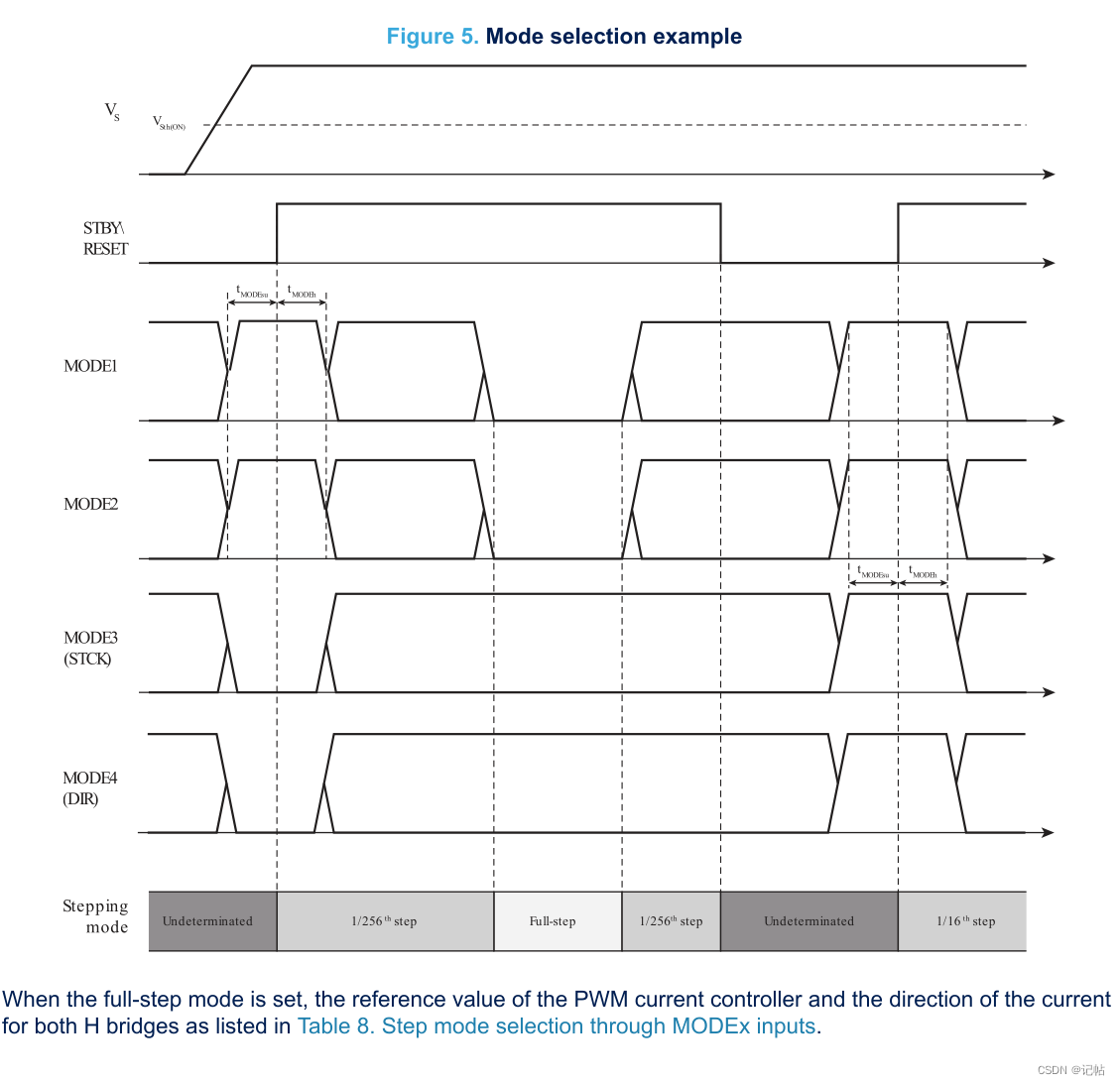
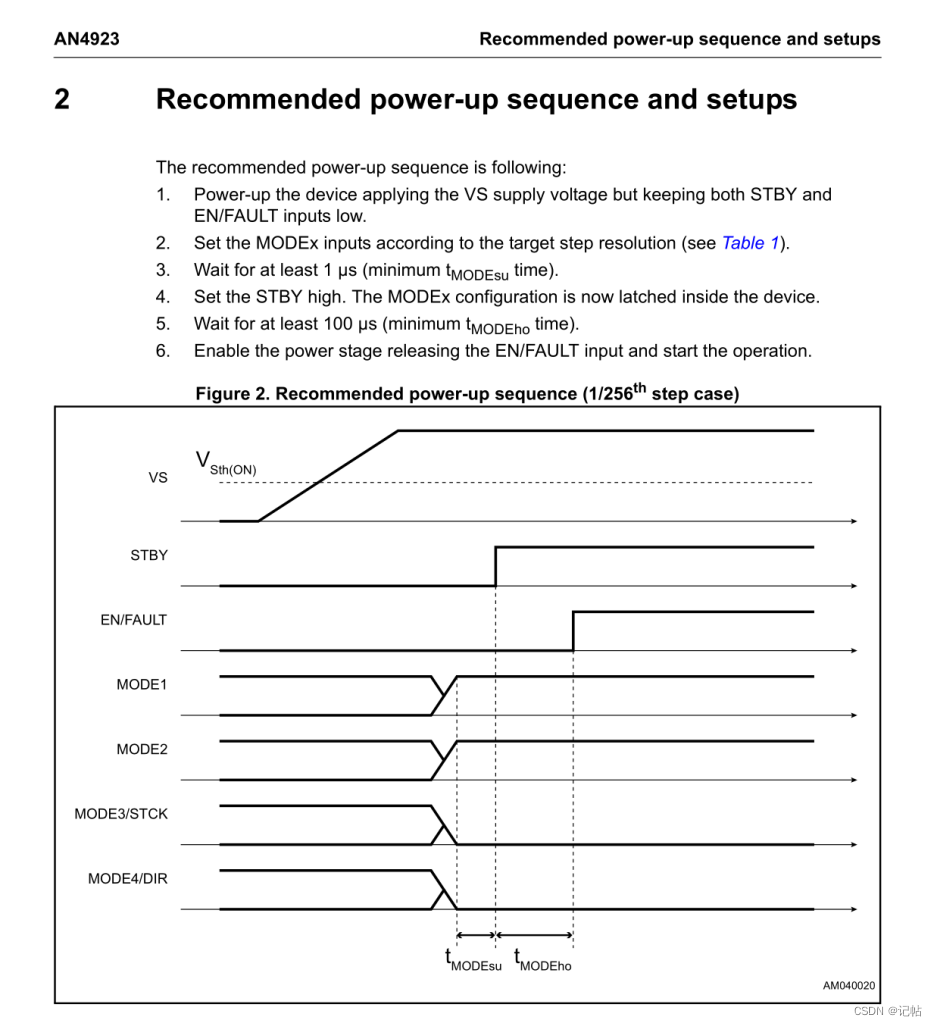
啟動時序圖如下所示,具體有如下幾個步驟。
- 上電:首先,將驅(qū)動器供電,即將VS供電電壓連接到驅(qū)動器。但是保持STBY和EN/FAULT輸入都處于低電平狀態(tài)。
- 設置MODEx輸入:根據(jù)目標步進分辨率(可以參考Table 1),設置MODEx輸入引腳的狀態(tài)。這些引腳決定了步進電機的微步運動模式。
- 等待:等待至少1微秒(t MODEsu 最小時間)。這個等待時間是確保MODEx輸入被穩(wěn)定設置的時間。
- 將STBY引腳置高:將STBY引腳設置為高電平。這將導致之前設置的MODEx配置在設備內(nèi)部被鎖存。
- 等待:再等待至少100微秒(t MODEho 最小時間)。這個等待時間是確保MODEx配置被正確鎖存的時間。
- 啟用電源級:釋放EN/FAULT輸入,使電源級開始工作。這意味著驅(qū)動器已經(jīng)準備好執(zhí)行步進操作。
通過按照這個推薦的上電順序和設置過程,您可以確保在驅(qū)動器開始工作之前,各個輸入的狀態(tài)都穩(wěn)定,并且微步模式配置正確地被鎖存,從而實現(xiàn)步進電機的精確控制。這個過程有助于減少潛在的啟動問題和不穩(wěn)定性。
具體配置如下所示。
STSPIN220使能、低功耗、方向初始化如下所示。
//使能操作 1使能0失能
void STSPIN220_enable(uint8_t enable)
{
if(enable)
HAL_GPIO_WritePin(en_GPIO_Port, en_Pin, 1);
else
HAL_GPIO_WritePin(en_GPIO_Port, en_Pin, 0);
}
//方向設置 0反1正
void STSPIN220_setDirection(uint8_t direction)
{
if(direction)
HAL_GPIO_WritePin(mode4_GPIO_Port, mode4_Pin, 1);
else
HAL_GPIO_WritePin(mode4_GPIO_Port, mode4_Pin, 0);
}
//低功耗模式 1使能0失能
void STSPIN220_Stby(uint8_t stby)
{
if(stby)
HAL_GPIO_WritePin(stby_GPIO_Port, stby_Pin, 0);
else
HAL_GPIO_WritePin(stby_GPIO_Port, stby_Pin, 1);
}
定時器配置
STM32CUBEMX中,選擇定時器1,并將其配置為PWM輸出模式。確保選擇了正確的定時器通道(通道4)。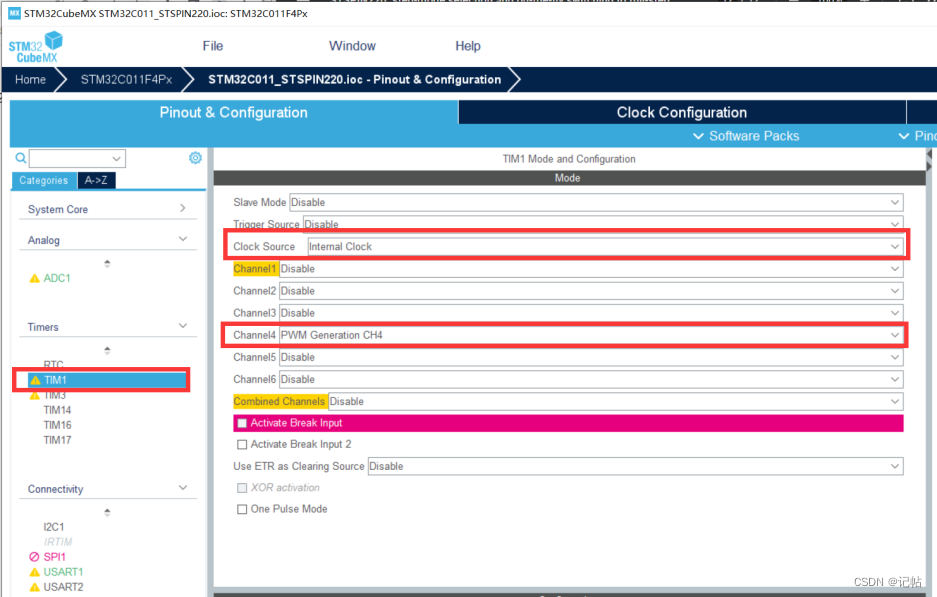
配置定時器1的時鐘源和預分頻因子。根據(jù)應用的要求和系統(tǒng)時鐘頻率,選擇適當?shù)臅r鐘源和預分頻因子,以獲得所需的脈沖頻率。將定時器1的時鐘源和預分頻因子配置為適合您的應用的值。
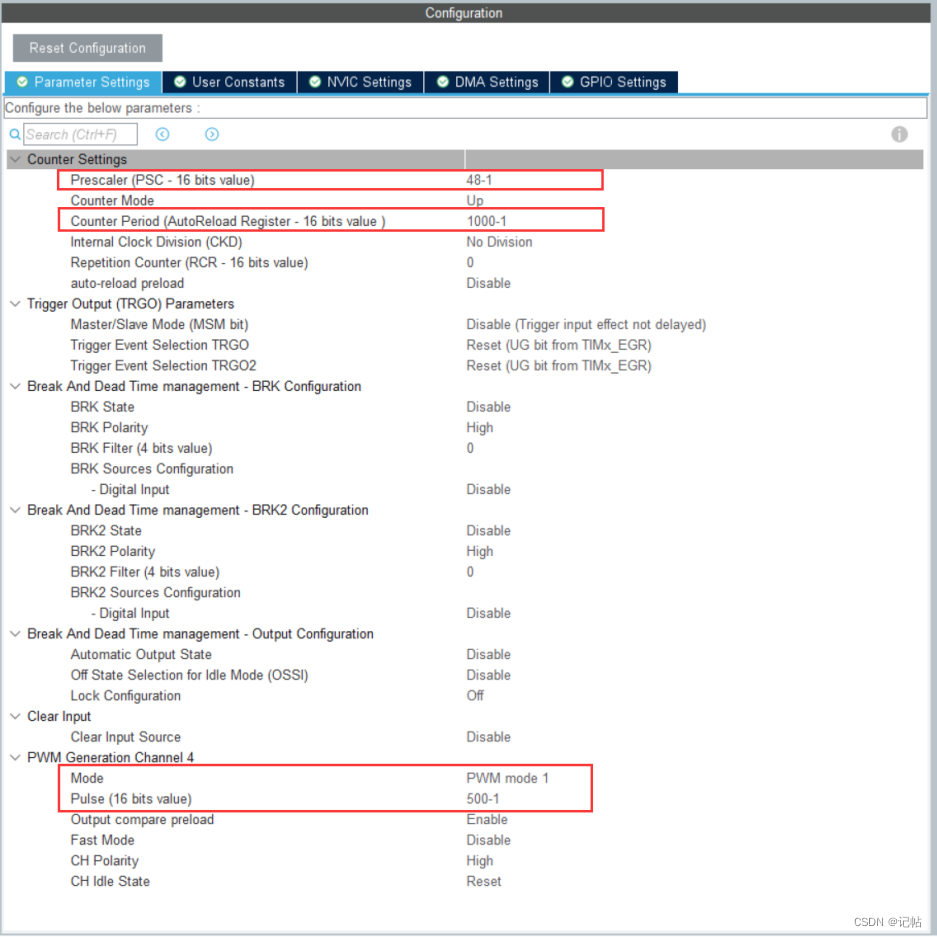
PWM頻率計算如下所示。
在上述配置中,將定時器1的預分頻系數(shù)設置為48-1,自動重載值設置為1000-1。根據(jù)這些配置,PWM的頻率可以計算為48,000,000 / ((48-1+1) * (1000-1+1)) = 1000Hz,即1kHz。
在定時器中,通道的 "pulse"(脈沖)是指定時器輸出的信號的一種特性。每個定時器通道都可用于生成脈沖信號,而 "pulse" 通常指的是單個脈沖的持續(xù)時間。在這種設置中,我們將脈沖的占空比配置為50%,因此設置為500-1。
初始化mode
由于需要對mode進行初始化,主要操作為4個IO口,所以需要先對mode3管腳進行IO初始化為普通IO,后續(xù)切換為TIM模式。
/* USER CODE BEGIN 4 */
void MX_GPIO_Init_mode3(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(mode3_GPIO_Port, mode3_Pin, GPIO_PIN_RESET);
/*Configure GPIO pins : PAPin PAPin PAPin PAPin
PAPin */
GPIO_InitStruct.Pin = mode3_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
/* USER CODE END 4 */
注意需要聲明一下函數(shù)。
/* USER CODE BEGIN 0 */
void MX_GPIO_Init_mode3(void);
/* USER CODE END 0 */
同時定時器初始化需要關閉。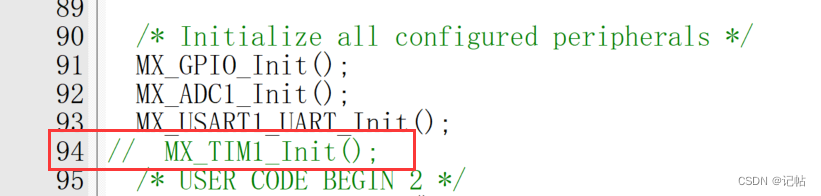
在初始化完畢mode3之后需要進行en和stby設置,具體如下所示。
/* USER CODE BEGIN 2 */
MX_GPIO_Init_mode3();
HAL_Delay(100);
STSPIN220_SetStepMode(0);//mode1-mode4都關閉
STSPIN220_enable(0);//使能操作 1使能0失能
STSPIN220_Stby(1);//低功耗模式 1開啟低功耗0關閉低功耗
HAL_Delay(100);
STSPIN220_SetStepMode(2);//細分操作
STSPIN220_Stby(0);//低功耗模式 1開啟低功耗0關閉低功耗,加載mode
HAL_Delay(100);//等待電平穩(wěn)定
STSPIN220_setDirection(1);//0反1正
HAL_Delay(100);//等待電平穩(wěn)定
STSPIN220_enable(1);//使能操作 1使能0失能
HAL_Delay(100);
MX_TIM1_Init();
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_4);
/* USER CODE END 2 */
審核編輯:湯梓紅
-
驅(qū)動器
+關注
關注
54文章
8615瀏覽量
149029 -
步進電機
+關注
關注
152文章
3155瀏覽量
149120 -
stm32cubemx
+關注
關注
5文章
286瀏覽量
15969
發(fā)布評論請先 登錄
基于STM32CUBEMX驅(qū)動低壓步進器電機驅(qū)動器STSPIN220(1)----套件概述
基于STM32CUBEMX驅(qū)動低壓步進器電機驅(qū)動器STSPIN220(3)----定時器中斷產(chǎn)生指定數(shù)量脈沖
意法半導體推出STSPIN模塊 為其它開發(fā)板增加高性能電機驅(qū)動器
意法半導體發(fā)布面向高電壓應用的新STSPIN32 BLDC電機驅(qū)動器
請問stspin220的保持電流是否可以調(diào)節(jié)?
基于STM32微控制器和STSPIN L6474步進電機驅(qū)動器設計
意法半導體發(fā)布新款STSPIN電機驅(qū)動器,可簡化中低功率電機驅(qū)動設計,提高電機控制的靈活性
有沒有辦法讓STSPIN220與小型電機一起工作?
STSPIN820馬達驅(qū)動器設計方案
電機控制和工廠自動化的門面:STSPIN、MCSDK、收發(fā)器和預測性維護
關于STMicroelectronics 低電壓 STSPIN 電機驅(qū)動器性能分析和應用
基于定時器中斷的ULN2003驅(qū)動器/步進電機驅(qū)動程序

意法半導體推出STSPIN32G0系列電機驅(qū)動器
工業(yè)自動化與家電新選擇:ST推出STSPIN32G0電機驅(qū)動器系列





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論