 電子發(fā)燒友App
電子發(fā)燒友App


1?背景描述
Ansys Maxwell高性能計算技術(shù)可幫助用戶提高仿真效率,求解更多設(shè)計方案、洞察更多設(shè)計空間,同時幫助用戶創(chuàng)建更準確的ROM。高性能計算包含DSO/LS-DSO、HPC、TDM、DDM等。
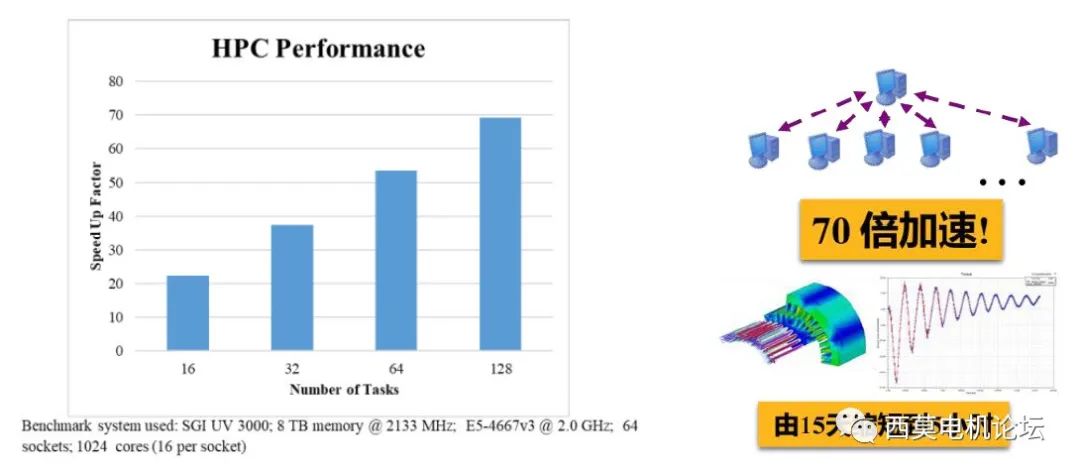
高性能計算
其中DSO/LS-DSO是高效、可擴展、分布式的并行計算解決方案,HPC可以多線程處理大型3D問題,DDM是3D渦流場求解器基于MPI的域分解法,可以對3D渦流場求解器GPU進行加速,而TDM支持如下幾種情況:
(1)同時求解多個時間步
(2)普通瞬態(tài)
(3)周期性&半周期性
(4)使用TDM求解3D瞬態(tài)場源-目標鏈接。
TDM求解
2 TDM功能介紹
TDM(Time Decomposition Method)時間分解法是一種高性能分布式計算的方法,它基于沿時間軸的時域分割來并行計算瞬態(tài)場問題,而不是幾何分割。
TDM不同于Maxwell常規(guī)瞬態(tài)算法,它不是順序求解各個時間步,而是多個時間步同時求解。
TDM可以使用在基于MPI的分布式內(nèi)存并行平臺上。
TDM具有非常好的可擴展性,可以明顯加速2D和3D瞬態(tài)場問題的求解。
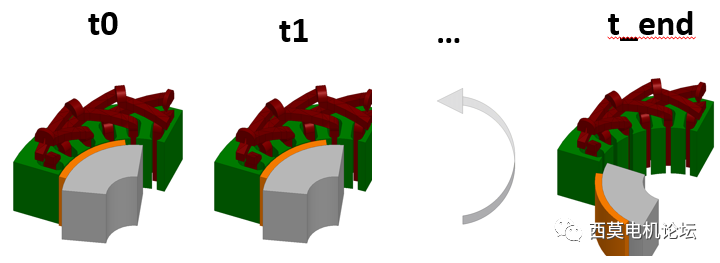
常規(guī)瞬態(tài)求解算法是按序求解所有的時間步,如下圖所示。
常規(guī)瞬態(tài)求解算法
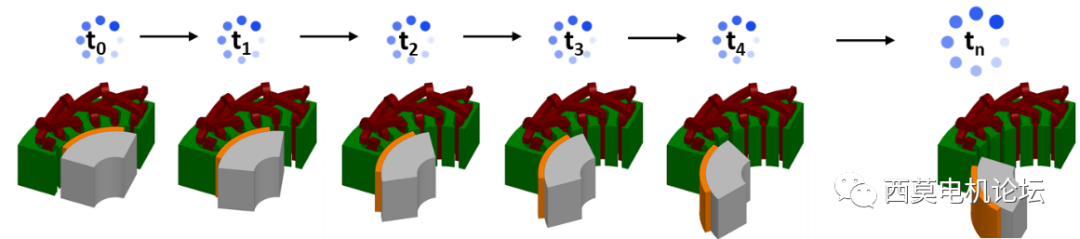
而TDM 瞬態(tài)求解算法是同時求解所有的時間步,如下圖所示。
TDM 瞬態(tài)求解算法
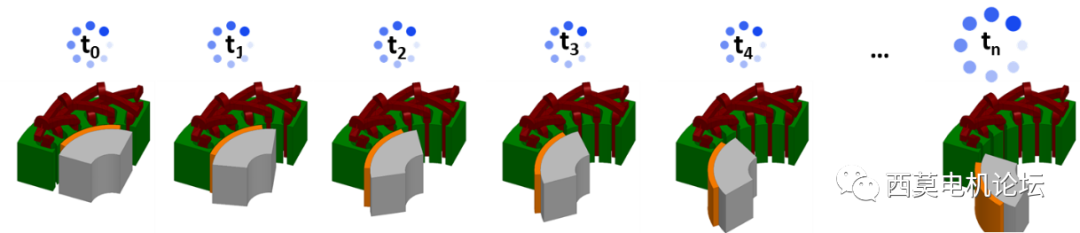
TDM求解算法中關(guān)于Sub-division子時間段的原理圖如下圖所示。
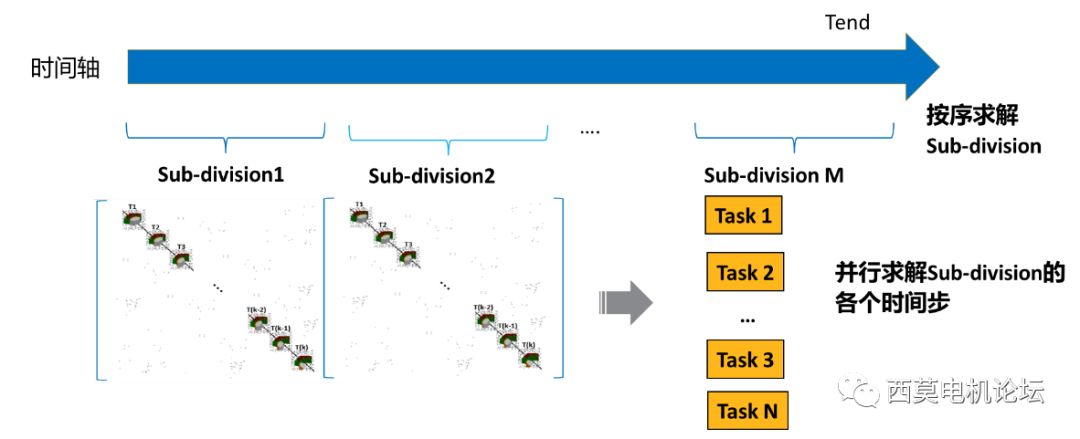
Sub-division子時間段
使用TDM需要進行兩處設(shè)置,分別是HPC設(shè)置及TDM設(shè)置。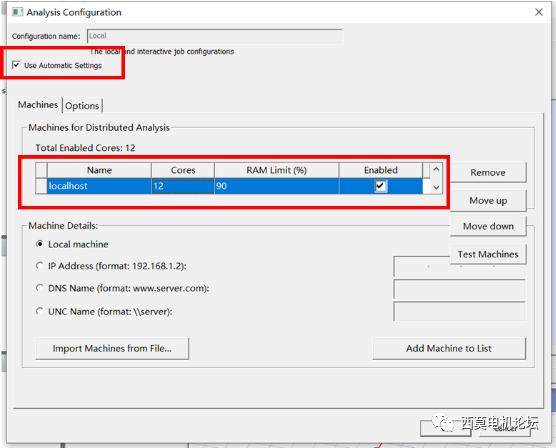
HPC設(shè)置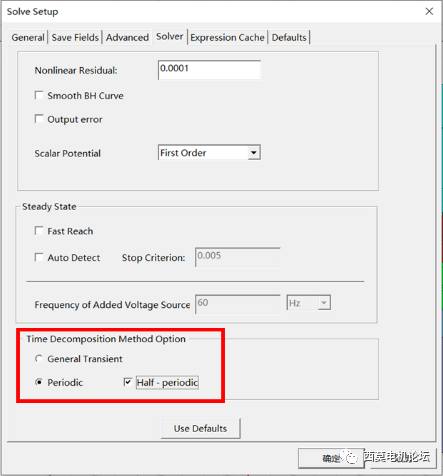
TDM設(shè)置
HPC設(shè)置方法:首先勾選Use Automatic Settings,通過Num variations distribute設(shè)置TDM并行掃參數(shù),Cores用于設(shè)置調(diào)用的核心數(shù),最大可設(shè)置為邏輯處理器核心數(shù)。
建議用戶按如下推薦進行設(shè)置:
協(xié)調(diào)Timesteps和Cores
使Timesteps/(Cores-1)=整數(shù)
由于PeriodicTDM同時對所有時間步進行求解,因此必須確保可用內(nèi)存大于每個時間步消耗內(nèi)存*時間步數(shù),并留20%左右余量。

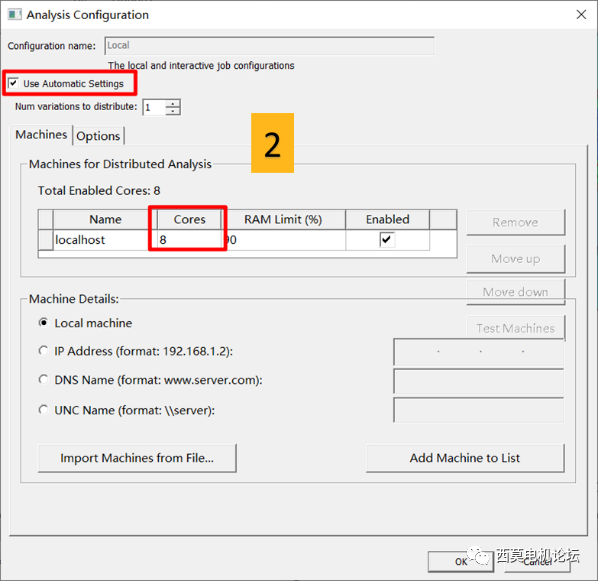
HPC參數(shù)設(shè)置
TDM有兩個選項,包含General Transient常規(guī)瞬態(tài)求解和Periodic周期性模型。General Transient 常規(guī)瞬態(tài)求解支持任意的瞬態(tài)模型,該方法是最靈活的方法,同時支持渦流效應(yīng),可以同時使用快速達到穩(wěn)定設(shè)置“fast reach steady state”。
Periodic周期性模型可以直接達到瞬態(tài)穩(wěn)定狀態(tài),如果求解是周期性的,可以使用分布式任務(wù)求解一個完整的周期(而且只需要求解一個)。
TDM選項
TDM包含周期/半周期TDM。周期TDM設(shè)置仿真時間為一個或多個周期,軟件只需計算一個周期,直接輸出所有周期結(jié)果,并直接達到瞬態(tài)穩(wěn)態(tài),典型應(yīng)用是同步電機的短路分析,感應(yīng)電機堵轉(zhuǎn)分析。
半周期TDM設(shè)置仿真時間為半個周期,軟件只需計算半個周期,直接輸出一個完整周期結(jié)果,典型應(yīng)用是快速計算同步電機的穩(wěn)態(tài)工況。
周期TDM
半周期TDM
周期性TDM的限制條件有如下幾點。
首先是關(guān)于外電路。
由于TDM算法需要同時求解子時間步集合,如果外電路中的PWM波的開關(guān)策略要基于歷史時間步下的電流結(jié)果的話,對于TDM求解器來說,激勵源在不同時間步時是未知的,所以這種情況不支持TDM功能,但是如果開關(guān)策略是基于時間或位置,則是可以應(yīng)用TDM功能。
其次是關(guān)于機械瞬態(tài)。
TDM 不支持機械瞬態(tài),因為TDM必須事先知道每個時間步的移動位置,以便FEA求解器在該預(yù)定位置執(zhí)行計算,機械瞬態(tài)顯然無法滿足這一點。
再次是關(guān)于鐵損計算。
一個時間步的解不能依賴于幾個時間步以前的歷史時間步的解(由于時間積分算法自身需要,允許前兩個時間步解)。常規(guī)的鐵損計算是支持的,因為常規(guī)的鐵損計算是在后處理中完成的。嚴格來說是不支持磁滯模型,但是對于電機硅鋼片這類軟磁材料,由于磁滯效應(yīng)較弱,求解器采用了解耦算法,使TDM支持這種應(yīng)用,但計算結(jié)果與常規(guī)算法有一定誤差。
最后是關(guān)于退磁。
永磁體退磁分析的目的是在瞬態(tài)場分析中找到整個瞬態(tài)過程中最惡劣的工作點,每當發(fā)現(xiàn)新的最惡劣工作點后,軟件將使用線性表示的永磁特性來構(gòu)建新的回復(fù)線,該回復(fù)線應(yīng)用于后續(xù)時間步的仿真。
因此嚴格來說,TDM不支持退磁模型,因為TDM必須同時求解某個時間步子集。但是,作為一種合理的近似方案,我們可以基于分布式并行的TDM同時求解某個時間子集,然后在這些已求解的時間步中找到最惡劣的工作點,進一步,最惡劣工作點用于構(gòu)建一條新的回復(fù)線,該回復(fù)線用于下一個時間子集的計算。
這意味著找尋最惡劣工作點這項工作是在逐個時間子集中進行的,而不是像在常規(guī)計算那樣在逐個時間步中進行的。因此通過這種方法找到的最惡劣工作點會與常規(guī)計算時有一些不同。但是,從實際應(yīng)用的角度來看,該解決方案可以被認為是足夠準確的。為了盡可能減少誤差,可以減少一個時間子集中的時間步數(shù)。
3??TDM在永磁電機仿真中的應(yīng)用
開路和穩(wěn)態(tài)短路分析是永磁同步電機的重點仿真項目,利用Maxwell中的Periodic TDM和Half-Periodic TDM功能,可大幅降低計算量,縮短仿真時間。提高仿真效率。
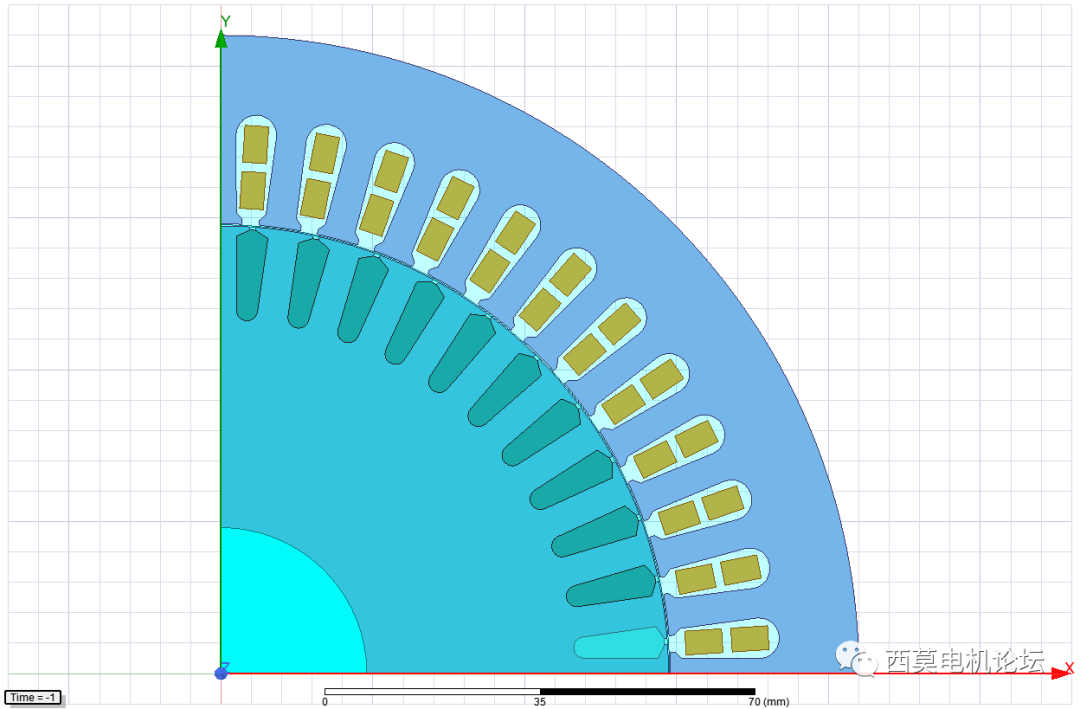
永磁同步電機
首先進行穩(wěn)態(tài)短路分析,采用PeriodicTDM。在Setup>>Sovler處勾選Periodic,本例中電機極數(shù)為4極,Stop Time設(shè)置為1個電周期,每個電周期30個時間步,實際計算30個時間步。
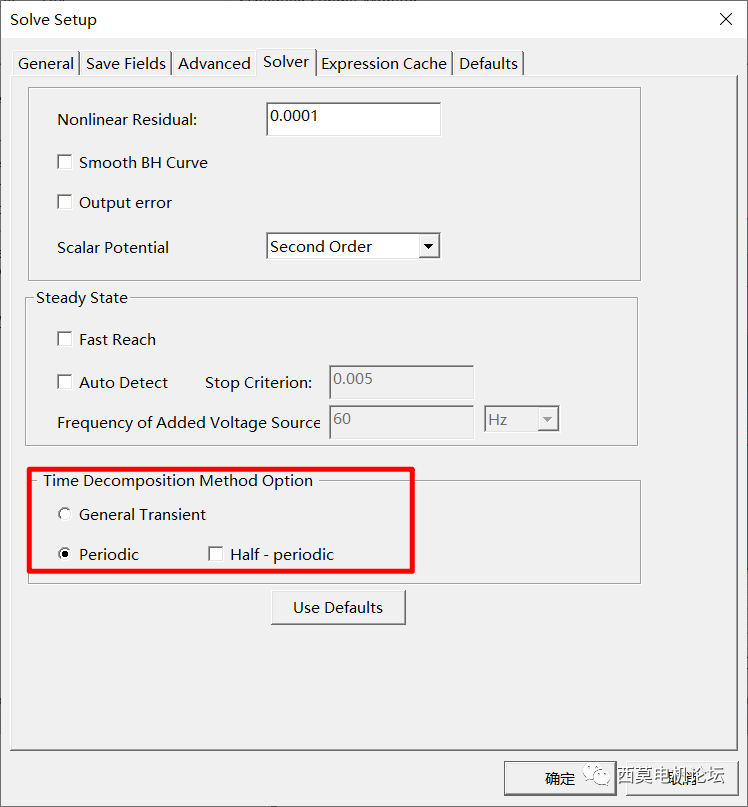
勾選Periodic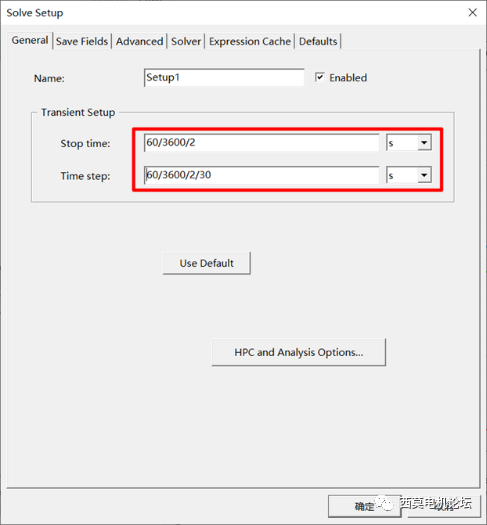 ?
?
設(shè)置計算時間及時間步長
若采用常規(guī)方法計算,需要200電周期以上才能穩(wěn)定,而采用周期TDM,只需1個電周期達到穩(wěn)定,求解器跳過瞬態(tài)迭代過程,直接輸出穩(wěn)態(tài)短路電流,求解30個時間步總時間為17分鐘。
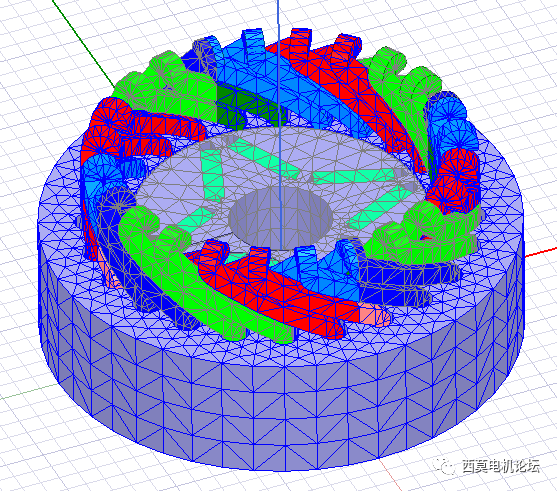
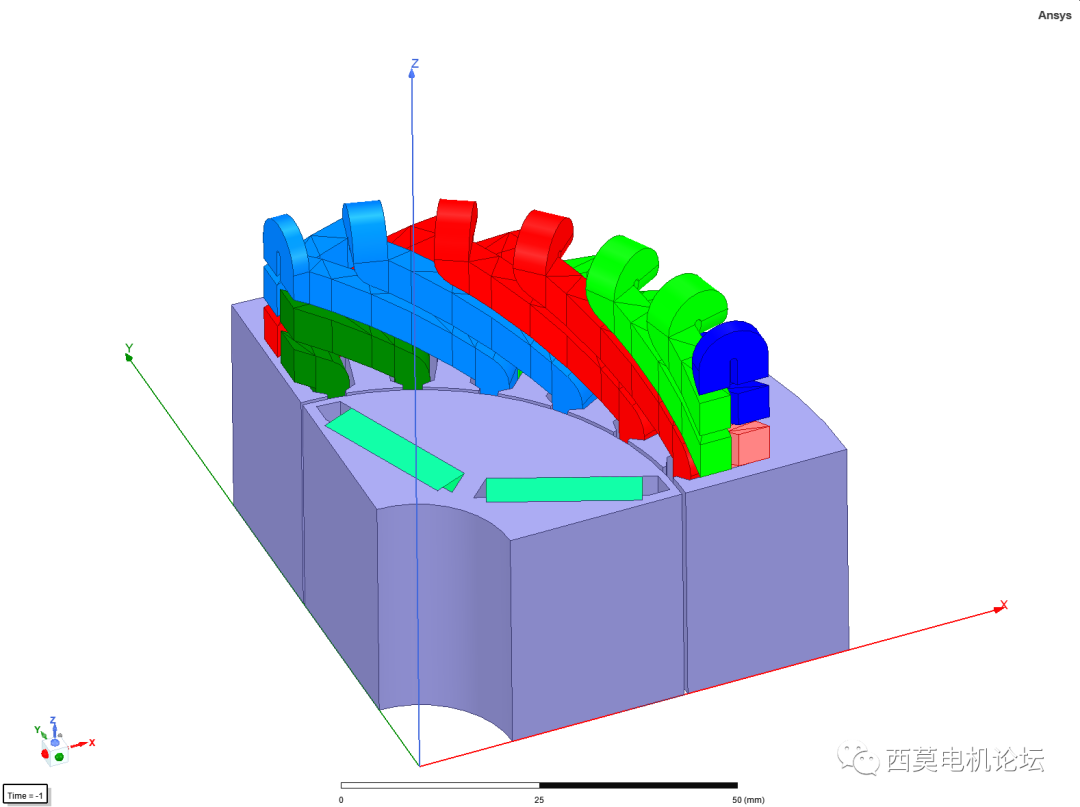
網(wǎng)格剖分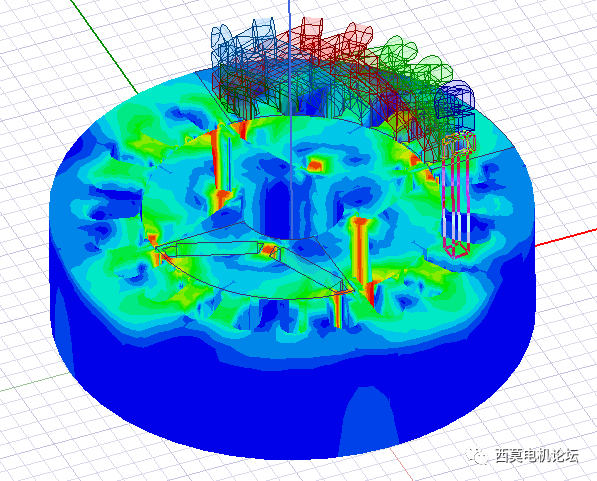
磁密云圖
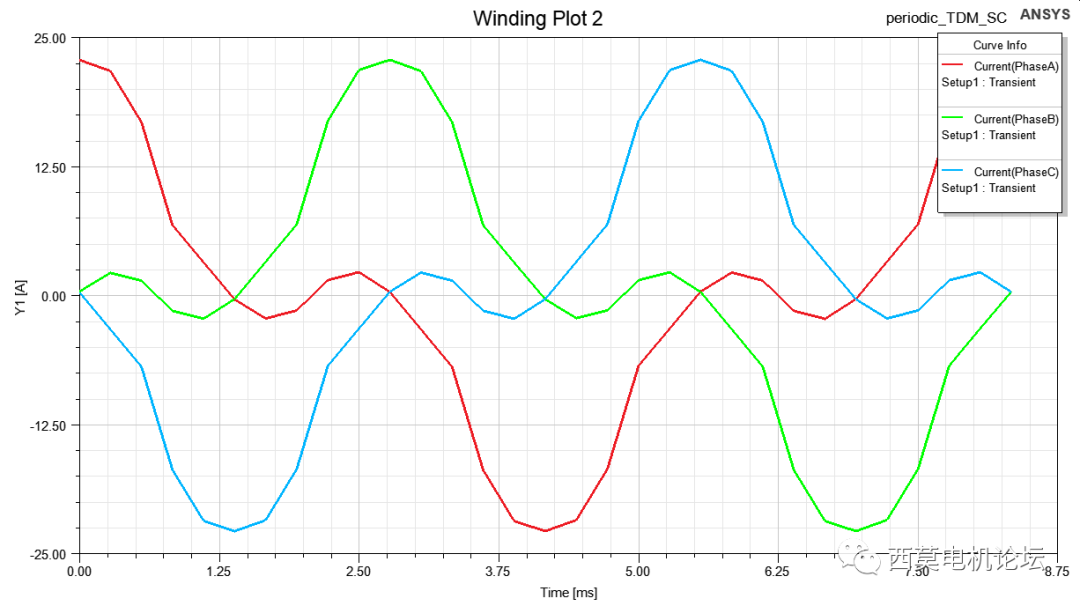
穩(wěn)態(tài)短路電流
用戶需要注意的是本例同樣適用于Half-Periodic。
接著進行開路分析,采用Half-PeriodicTDM。在Setup>>Sovler處勾選Half-Periodic,采用Half-Periodic求解時,求解模型需符合反對稱周期特性,本例中電機極數(shù)為4極,Stop Time設(shè)置為半個電周期,每個電周期采用60個時間步,實際計算30個時間步。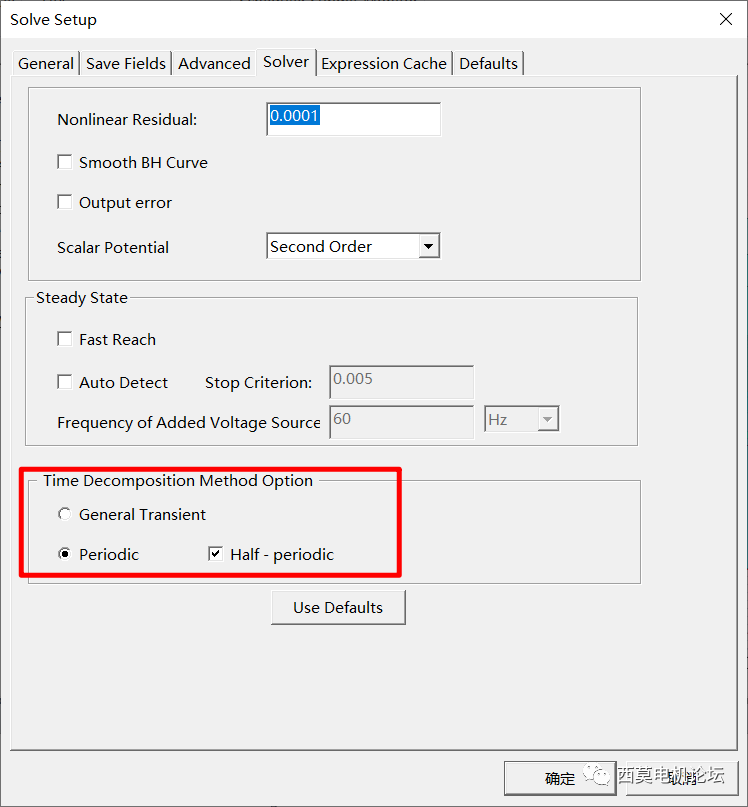 ?
?
勾選Half-Periodic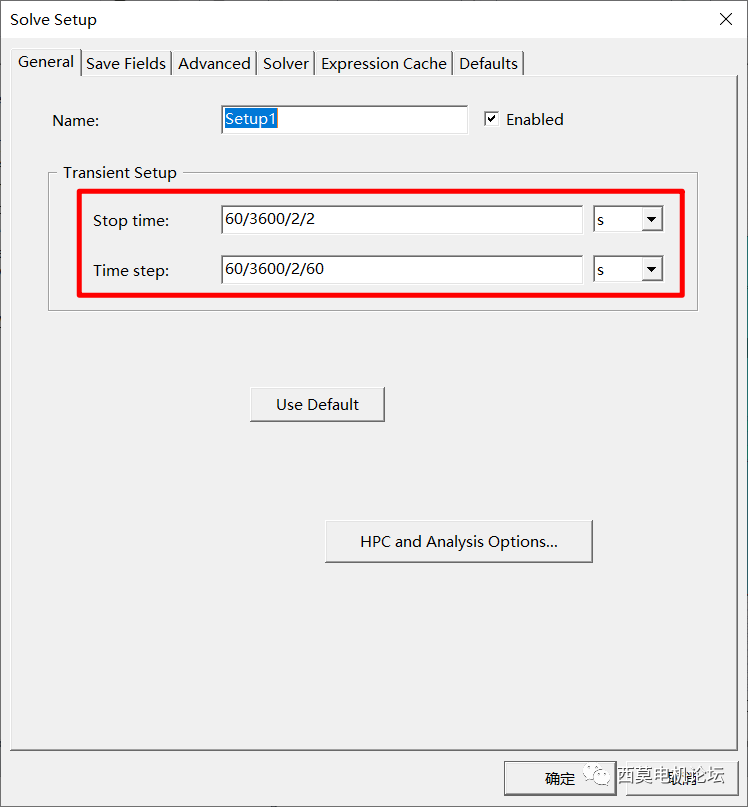 ?
?
設(shè)置計算時間及時間步長
常規(guī)計算鐵損至少需要一個半周期,采用半周期TDM,僅需計算半個周期,即可輸出完整周期鐵損、反電勢波形,本例求解30個時間步時間為7m30s。
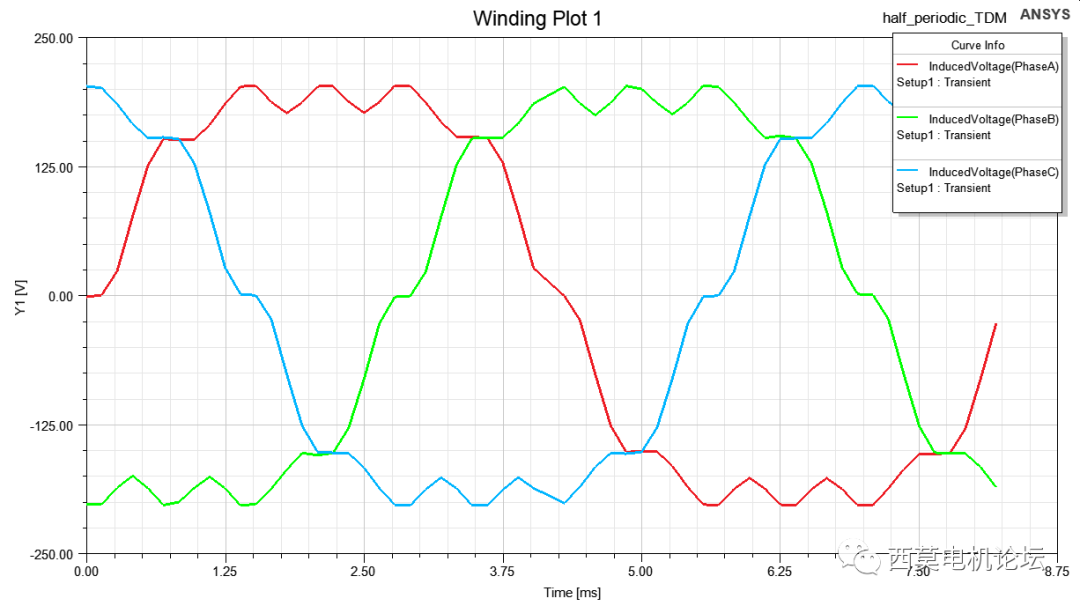
反電勢結(jié)果
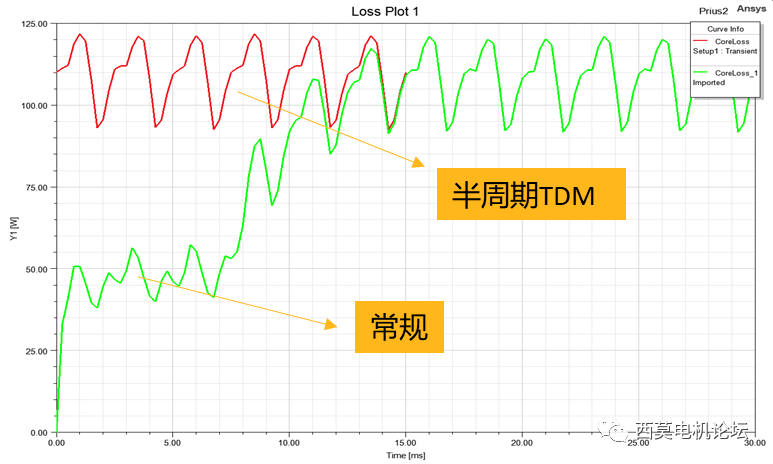
鐵損結(jié)果
各方案計算的總耗時及反電勢結(jié)果見下表所示。
| 方案 | 計算時間 | A相反電勢rms值/V |
| 無TDM | 36m50s | 159.98 |
| 常規(guī)TDM | 17m44s | |
| 周期TDM | 14m52s | 161.08 |
| 半周期TDM | 7m30s |
從上述結(jié)果可知,半周期TDM耗時最短,僅為7m30s,計算精度高。
4 TDM在感應(yīng)電機仿真中的應(yīng)用
堵轉(zhuǎn)仿真在感應(yīng)電機分析中比較常見,通常用于計算其堵轉(zhuǎn)轉(zhuǎn)矩和堵轉(zhuǎn)電流,校核電機起動性能。若采用常規(guī)分析方法,即使開啟Fast Reach和Auto Detect功能,也需要幾十個周期才能收斂,這將花費很長的計算時間,若使用周期TDM可以一個周期直達穩(wěn)態(tài),可以大幅降低求解計算量,提高仿真效率。
感應(yīng)電機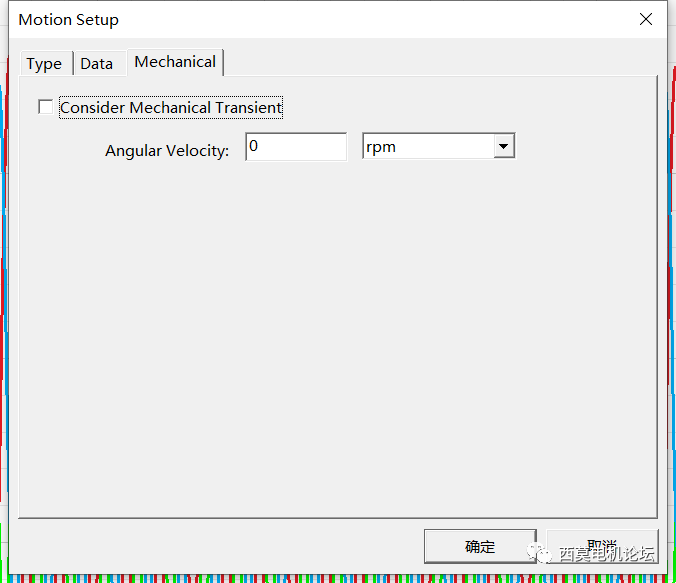
堵轉(zhuǎn)仿真
首先測試不使用TDM,單核計算單任務(wù),設(shè)置如下。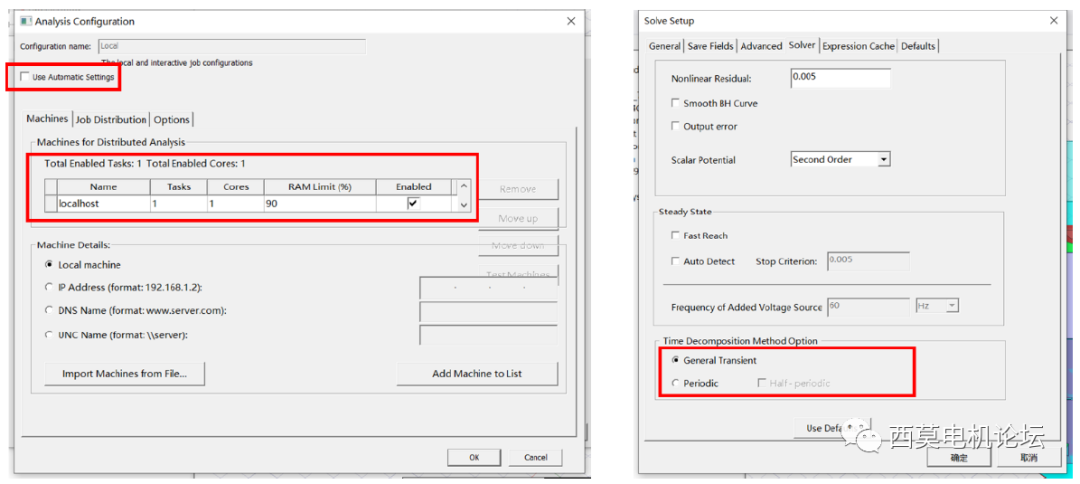
不使用TDM
仿真40個電周期后轉(zhuǎn)矩趨于穩(wěn)定,計算時間耗時3min48sec。
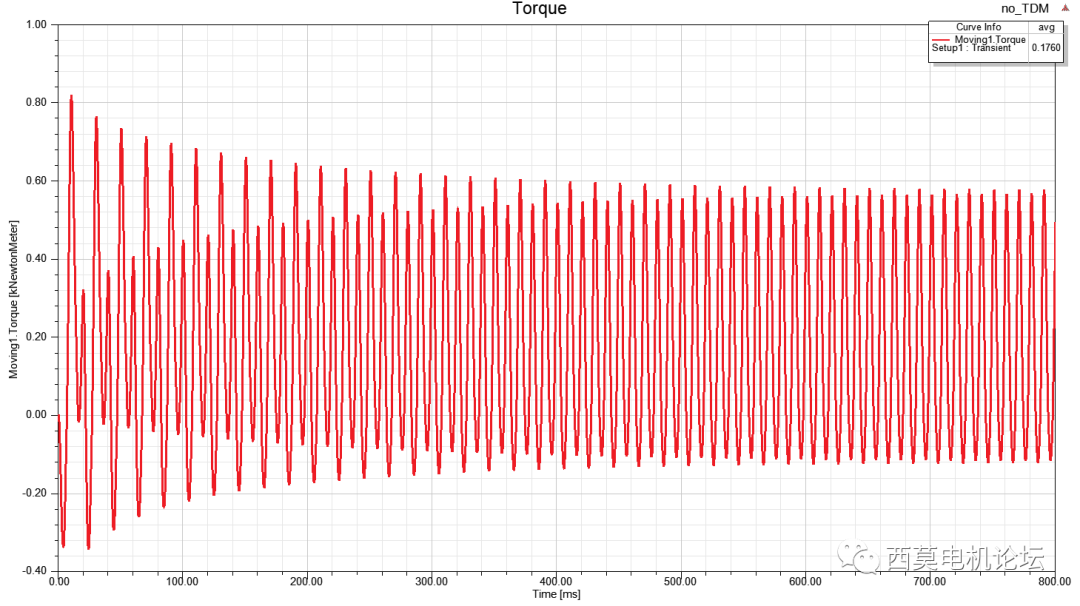
轉(zhuǎn)矩vs時間
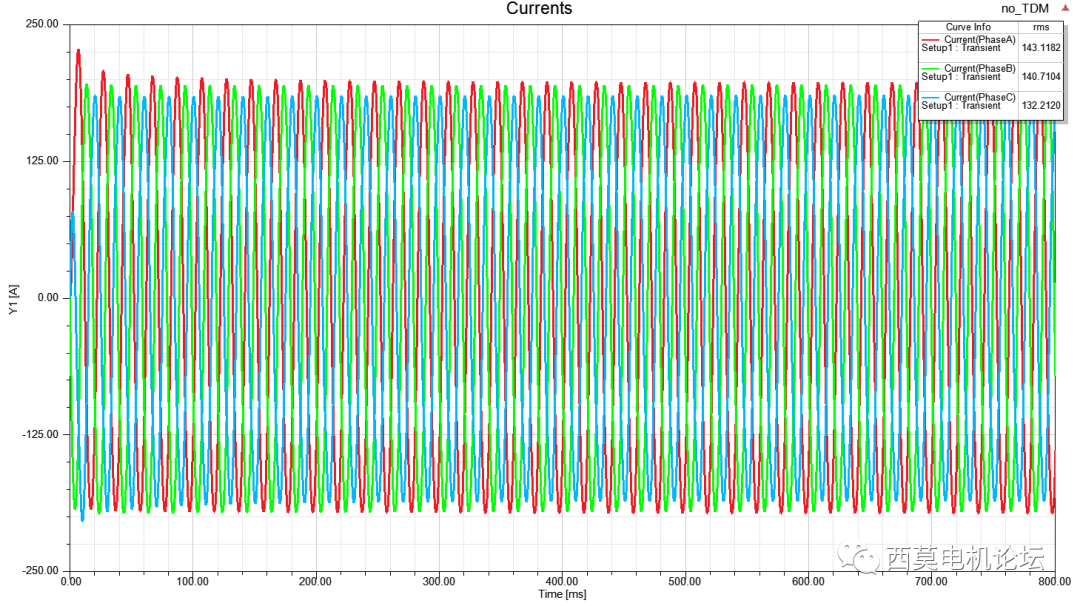
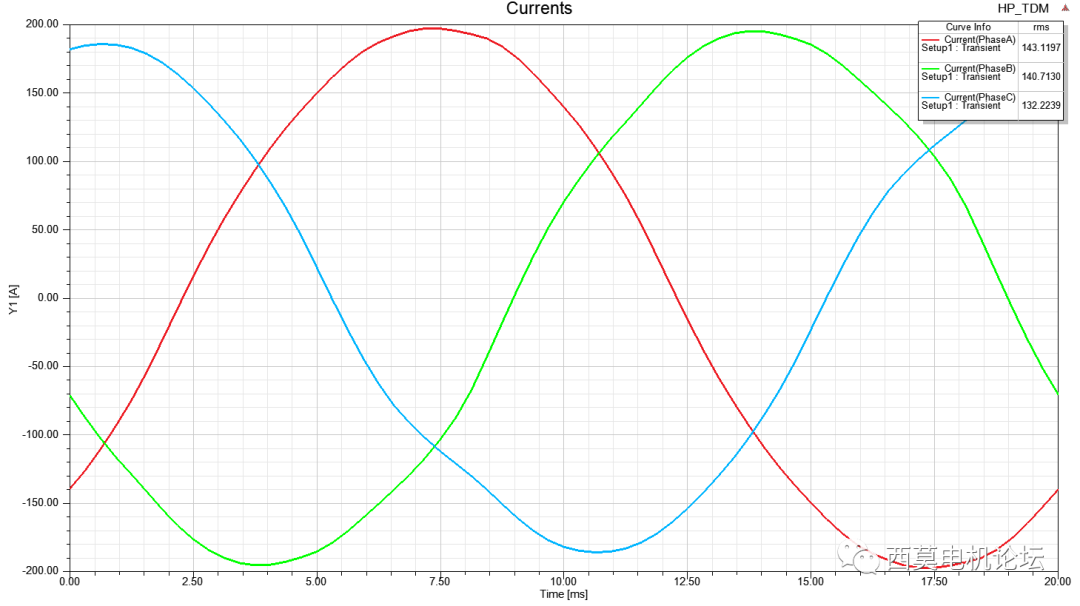
電流vs時間
接著測試使用周期TDM進行計算,設(shè)置如下。 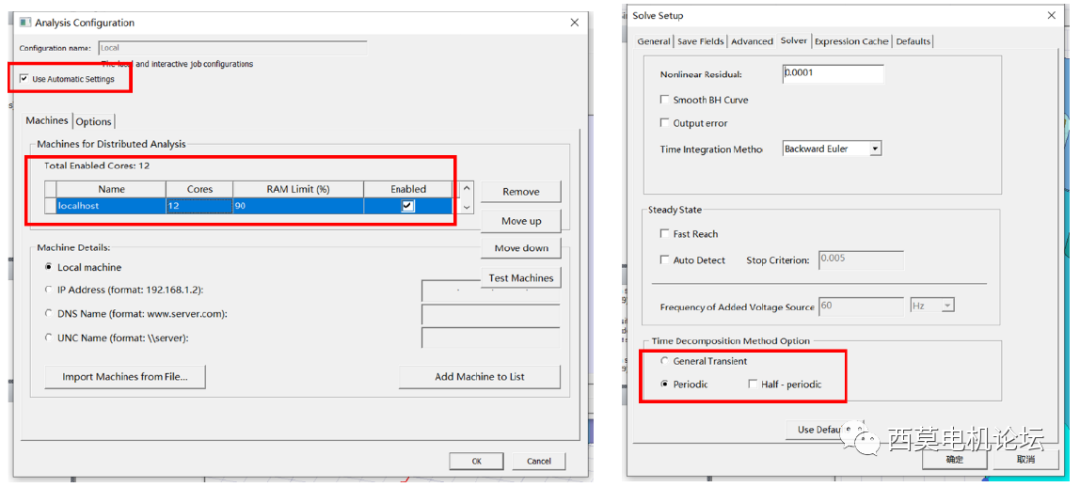
使用周期TDM
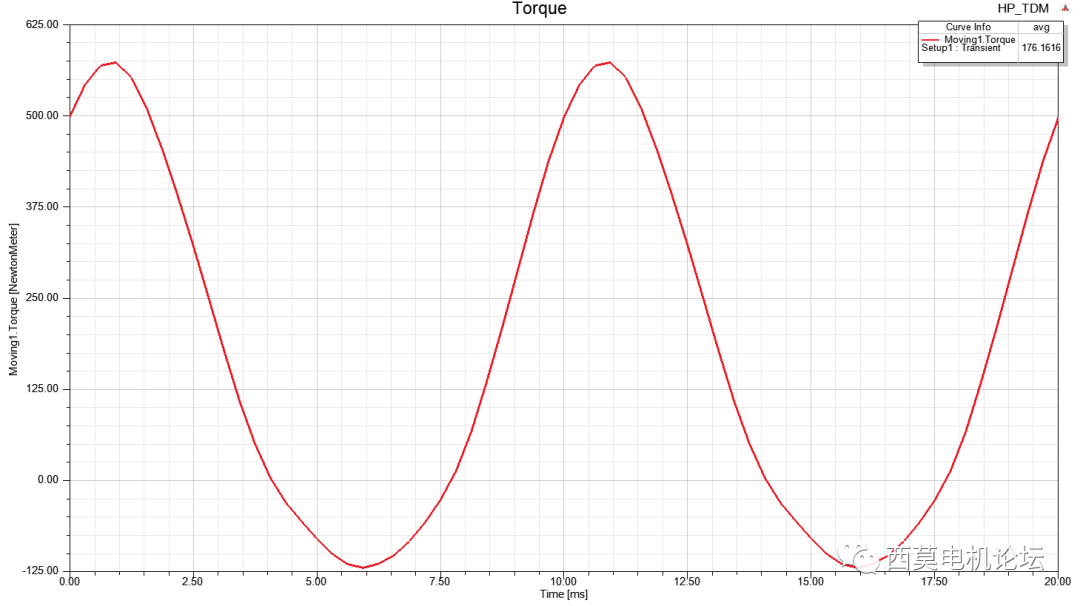
只需仿真一個電周期,即可直接達到穩(wěn)態(tài),計算耗時0min57sec。
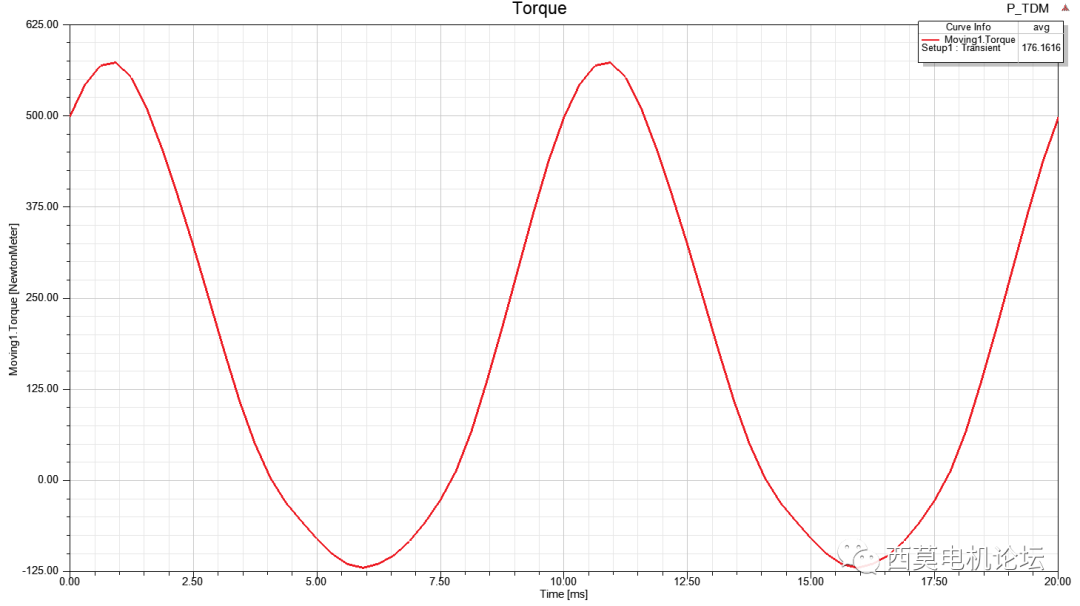
轉(zhuǎn)矩vs時間
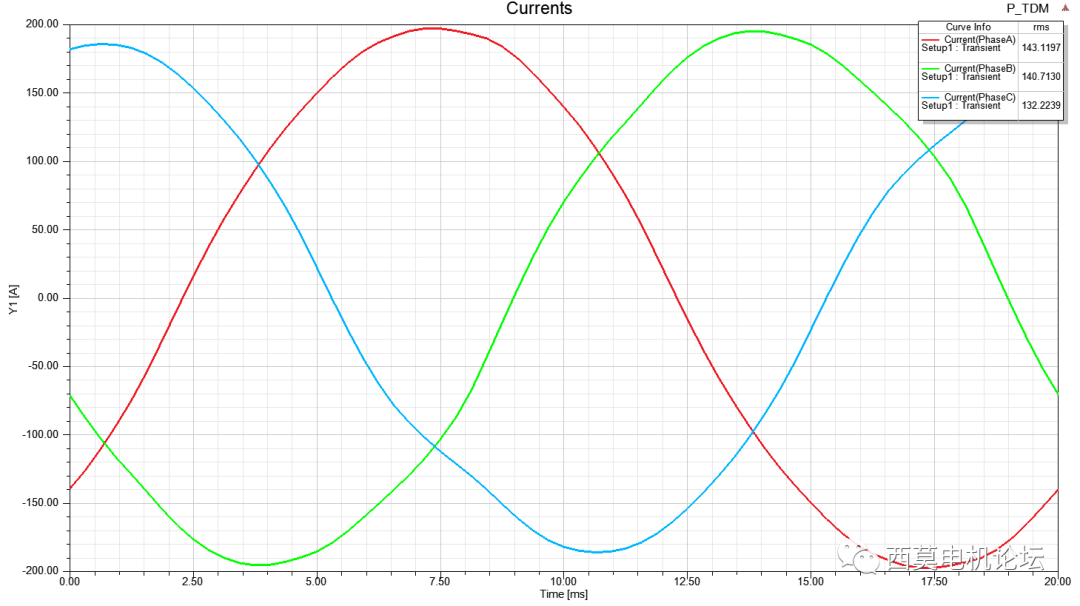
電流vs時間
最后測試使用半周期TDM進行計算,設(shè)置如下。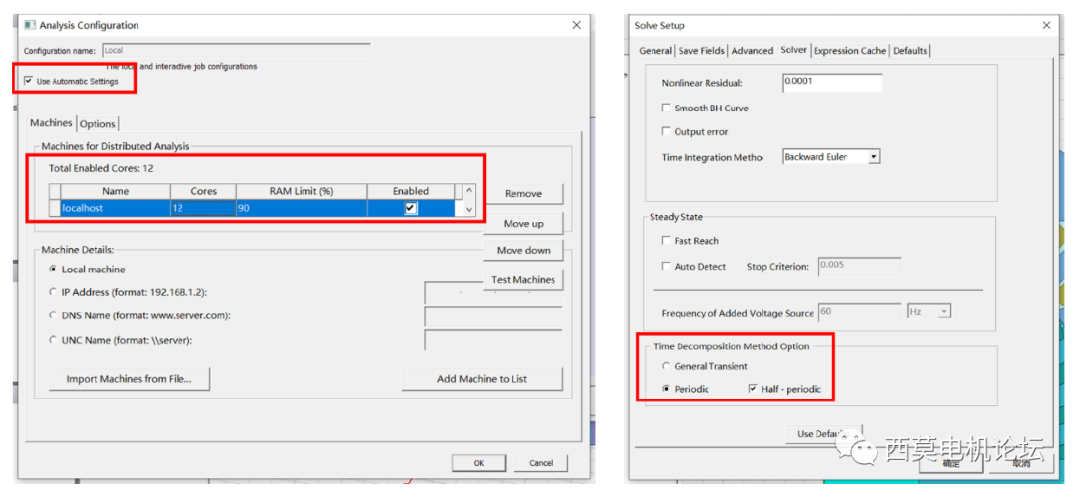
使用半周期TDM
只需仿真半個電周期,軟件自動給出穩(wěn)定后一個完整電周期的結(jié)果,計算耗時0min21sec。
轉(zhuǎn)矩vs時間
電流vs時間
四種計算方法所用計算時間及轉(zhuǎn)矩與電流值結(jié)果如下表所示。
| 計算方法 | 計算時間 | 轉(zhuǎn)矩平均值/Nm | A相電流rms值/A |
| 無TDM | 3m48s | 176.0478 | 143.1182 |
| 常規(guī)TDM | 4m36s | ||
| 周期TDM | 0m57s | 176.1616 | 143.1197 |
| 半周期TDM | 0m21s |
從結(jié)果可以看出,正常順序求解和常規(guī)TDM計算時間相近,而利用周期性TDM功能可大幅降低感應(yīng)電機堵轉(zhuǎn)工況仿真時間,且精度可靠。
周期性TDM與無TDM計算的堵轉(zhuǎn)電流與堵轉(zhuǎn)轉(zhuǎn)矩結(jié)果對比見下圖所示。
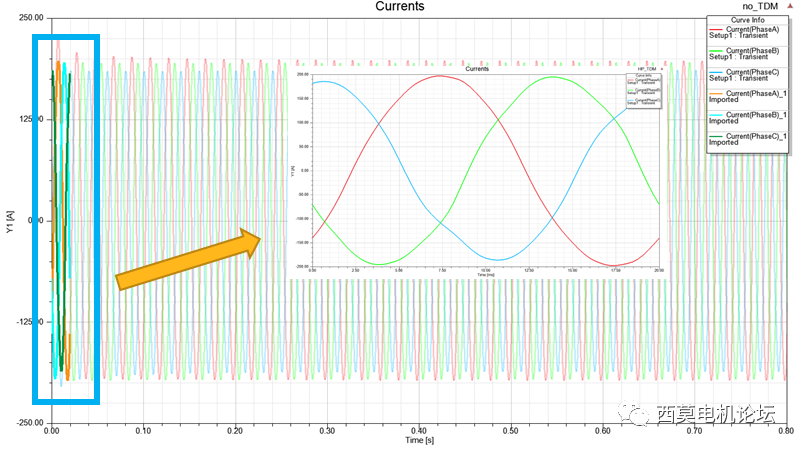
堵轉(zhuǎn)電流
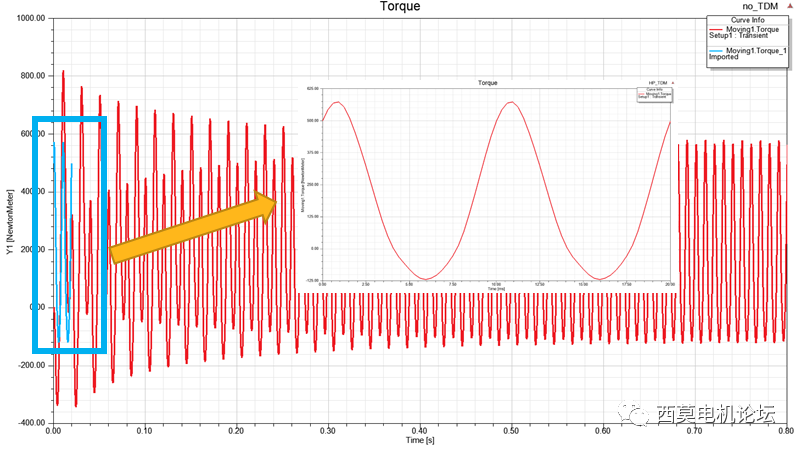
堵轉(zhuǎn)轉(zhuǎn)矩
當案例中有參數(shù)化掃描需求時,周期性TDM方式具有非常大的優(yōu)勢。以一轉(zhuǎn)子初始位置角度進行掃描為例,對比不同TDM計算方式總時間。常規(guī)TDM與周期TDM計算的轉(zhuǎn)矩結(jié)果見下圖所示。
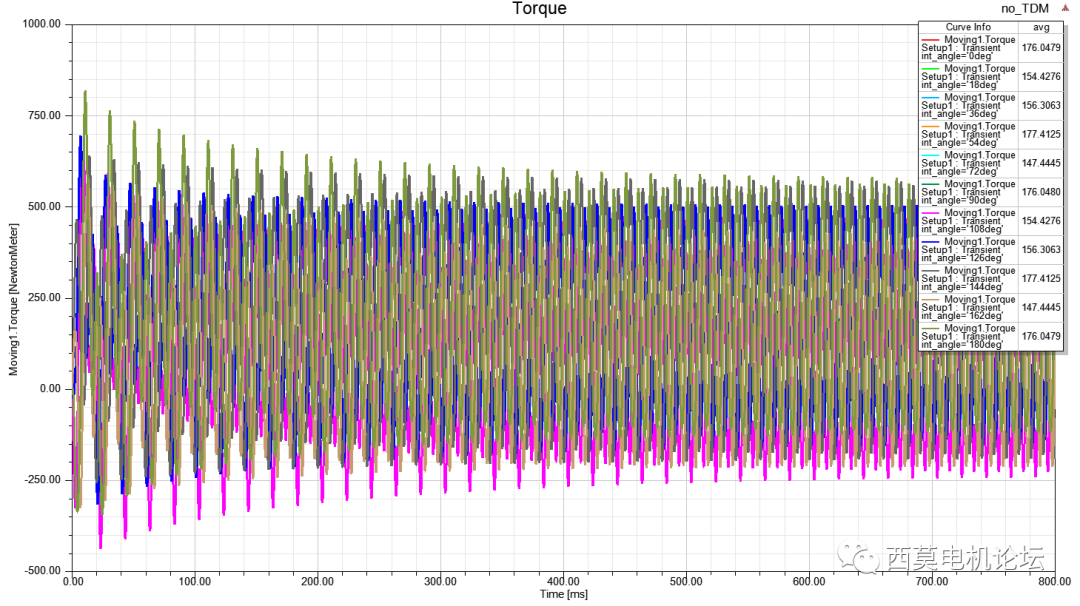
常規(guī)TDM
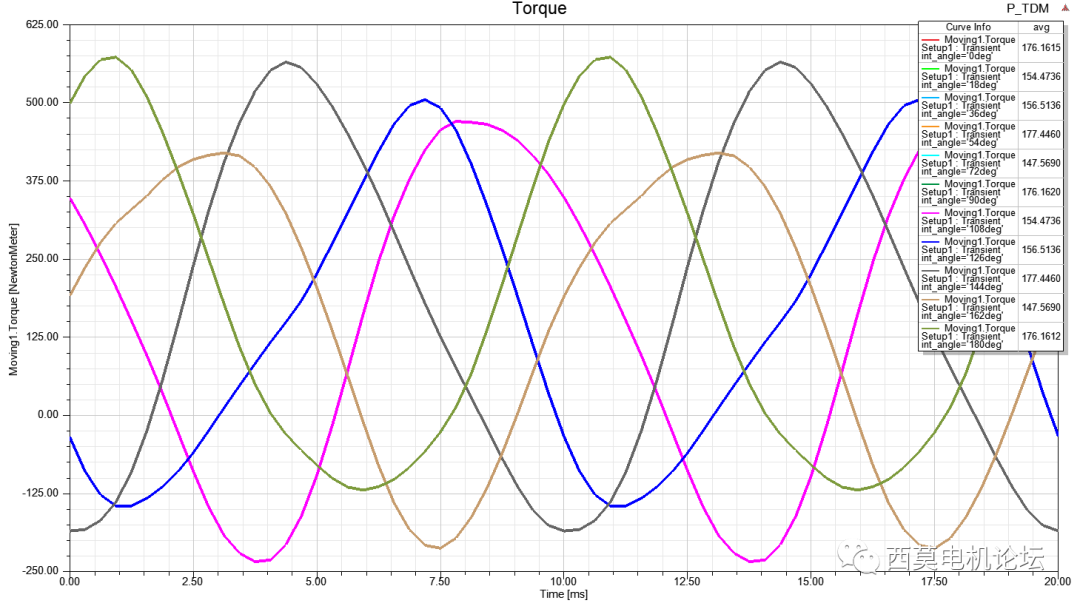
周期TDM
計算時間對比如下表所示。
| 計算方法 | 計算時間 |
| 常規(guī)TDM(40個電周期) | 1h16m49s |
| 周期TDM | 13m18s |
| 半周期TDM | 6m40s |
從結(jié)果可以看出,當采用常規(guī)TDM時,由于無法預(yù)測各初始位置角時達到穩(wěn)態(tài)所需時間,本例中統(tǒng)一采用40個電周期進行計算,然而某些初始位置角達到穩(wěn)態(tài)的時間可能小于或者大于40個電周期,在這種情況下,準確評估電機堵轉(zhuǎn)性能有較大困難。當采用周期性TDM時,程序直接給出穩(wěn)定后的仿真結(jié)果,這極大縮短了總體仿真時間
因此,當案例中有參數(shù)化掃描需求時,周期性TDM求解方式具有非常大的優(yōu)勢。
5 TDM在ECE提取中的應(yīng)用
在Maxwell有限元場計算中,有限元模型對電流和轉(zhuǎn)子位置角掃描,掃描后得到的有限元結(jié)果通過降階模型保存在數(shù)據(jù)表中形成ECE模型,可將ECE模型直接在Simplorer(Twin Builder)進行分析計算,也可以將ECE模型送到控制當中進行高級控制系統(tǒng)仿真。
等效抽取的結(jié)果是基于有限元計算得到的數(shù)據(jù)表,在控制系統(tǒng)聯(lián)合仿真過程中只需通過查表的方法就能得到電機的性能,因此將抽取后的結(jié)果應(yīng)用到系統(tǒng)仿真中,既保證了精度也提高了速度。
接下來分別測試兩個模型,分別是少單元數(shù)模型和中等單元數(shù)模型。
首先是少單元數(shù)模型,系統(tǒng)參數(shù)及模型參數(shù)信息如下:
操作系統(tǒng):Windows7
軟件版本:MaxwellR19.0
可用核數(shù):10個物理內(nèi)核(若使用超線程,20個虛擬內(nèi)核)
測試模型:Prius 2DMotor
單元總數(shù):1634
總數(shù)據(jù)點數(shù):13671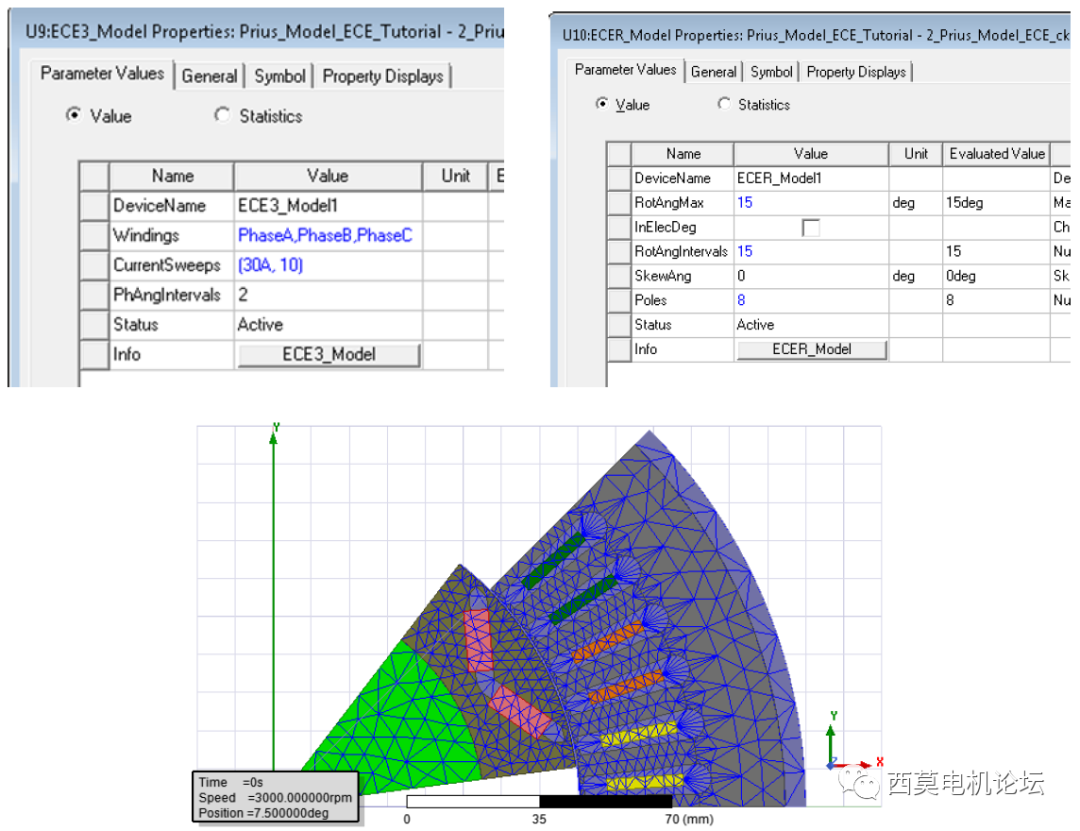
少單元數(shù)模型(1634單元數(shù)目)
計算耗時結(jié)果如下表所示。
| HPC Setting | Cores | Time/min | Time % |
| NON | 1 | 79 | 100 |
| TDM - Auto | 2 | 85 | 108 |
| TDM- Auto | 4 | 39 | 49 |
| TDM- Auto | 8 | 28 | 35 |
| TDM- Auto | 16 (hyperthreading) | 36 | 46 |
| Regular HPC | 16(hyperthreading) | 82 | 104 |
接下來是中等單元數(shù)模型,系統(tǒng)參數(shù)及模型參數(shù)信息如下:
操作系統(tǒng):Windows7
軟件版本:MaxwellR19.0
可用核數(shù):10個物理內(nèi)核(若使用超線程,20個虛擬內(nèi)核)
測試模型:Prius 2DMotor
單元總數(shù):16286
總數(shù)據(jù)點數(shù):13671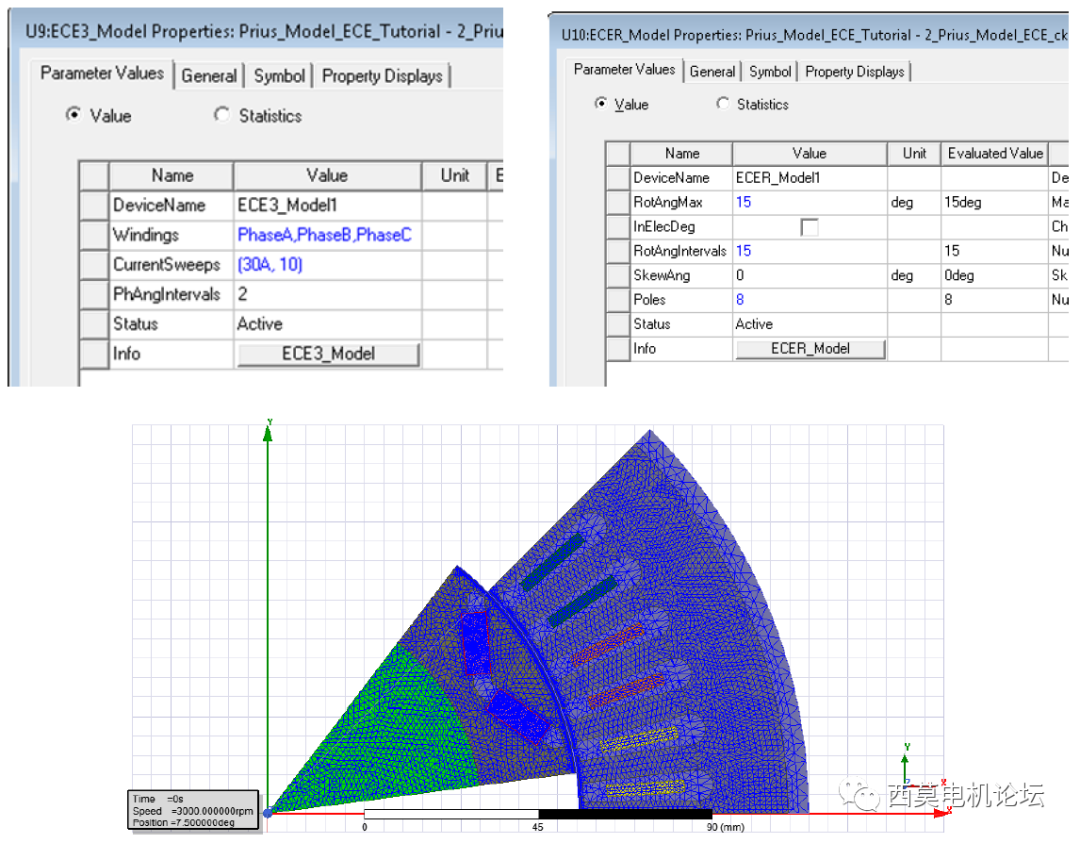
中等單元數(shù)模型(16286單元數(shù)目)
計算耗時結(jié)果如下表所示。
| HPC Setting | Cores | Time/min | Time % |
| NON | 1 | 347 | 100 |
| TDM - Auto | 2 | 361 | 104 |
| TDM- Auto | 4 | 312 | 90 |
| TDM- Auto | 8 | 149 | 43 |
| TDM- Auto | 16 (hyperthreading) | 110 | 32 |
| Regular HPC | 16(hyperthreading) | 360 | 104 |
6?總結(jié)
TDM時間分解法是一種高性能分布式計算的方法,它基于沿時間軸的時域分割來并行計算瞬態(tài)場問題。TDM主要優(yōu)點總結(jié)如下:
(1) TDM可以實現(xiàn)多時間步的并行求解,充分利用計算機資源;
(2) 周期TDM對于同步電機穩(wěn)態(tài)短路工況仿真只需一個周期即可收斂,大幅降低計算量;
(3) 周期TDM對于同步電機正常穩(wěn)態(tài)工況也有價值,減少鐵損計算周期數(shù);
(4) 周期TDM對于感應(yīng)電機堵轉(zhuǎn)工況的快速收斂有極大的幫助;
(5) TDM可大幅提高電機ECE模型提取速度。
總之,TDM時間分解法可幫助用戶提高仿真效率,求解更多設(shè)計方案、洞察更多設(shè)計空間,同時幫助用戶創(chuàng)建更準確的ROM。
審核編輯:劉清











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論