 電子發燒友App
電子發燒友App


對于移動機器人,定位技術是保證移動機器人軌跡/運動作業的前提技術,特別是跟蹤作業的基礎。
與自動駕駛車輛定位不同,小型移動機器人更需要的是定位精度。根據作業環境,小型移動機器人定位技術可以視為室內定位系統(Indoor Location System, ILS)。小型移動機器人定位技術不同于機械加工領域的定位技術,從關鍵詞上可以明顯區別“Location/Localization”與“Position/Positioning”。Localization 指的是機器人在作業空間內的自身的位置關系問題,position 是會指向更精密的點問題。
本文的主要內容包括:室內定位測量原理(物理屬性)[1],室內定位技術,定位模型方法,定位算法,定位系統評價因子,基于慣導的定位系統,基于無線電網絡的定位技術,集群定位算法。
室內定位測量原理
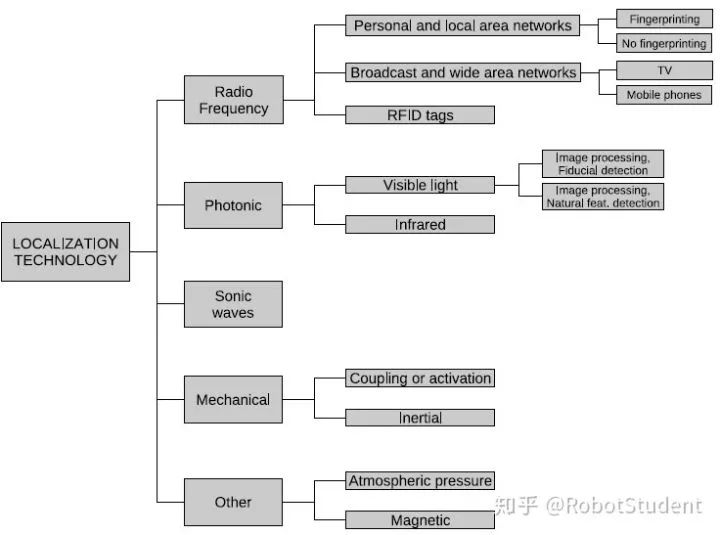
無線電頻譜與電磁波
(1)個人或區域互聯網,包括IEEE 802.11, Ultra-Wideband (UWB),ZigBee, 或者 Bluetooth。
采指紋基定位方法
鄰近技術
貝葉斯統計匹配
極大似然估計
關聯判決(Correlation discriminant kernel selection)
非采指紋基定位方法
幾何學
(2)區域廣播網絡,包括定位目的的網絡,例如GPS/GNSS,以及具有定位功能多的網絡,例如智能手機網絡、電視廣播信號。
電視信號
(3)?RFID 標簽 (4)雷達 光子能場 (1)圖像分析,自然特征提取與識別(場景圖片)
移動相機系統
固定相機系統
(2)圖像分析與特征點標記(二維碼定位)
此外,還有聲波、機械能(慣性/接觸)、地球磁場、大氣壓。
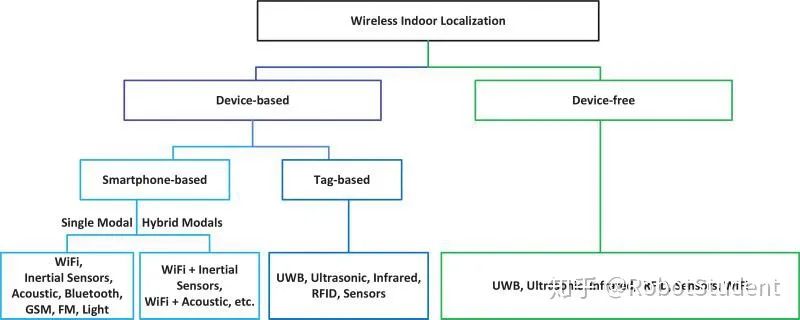
無線電室內定位系統分類[2]
室內定位技術
室內定位服務系統Indoor Location Based Services (ILBS)可以簡單地分為三類[3]:
1、網絡系統:基于無線網絡
2、慣性系統:機載慣導系統預估定位
3、混合系統:融合無線網絡與慣性系統的混合系統
RSS-IMU 混合系統
基于地圖的混合系統
基于智能手機的混合系統
室內定位模擬方法分類
1、angle of arrival(AoA) 技術:根據到達信號角度
2、time of arrival(ToA) 技術:根據到達信號時間(類似雷達測距)
3、fingerprinting 技術,即特征技術
? ?
室內定位模擬算法
1、三角定位(Triangulation),需要借助固定基站或者已知基站位置信息,GPS等無線網絡定位法。
2、鄰近(Proximity), 使用具有有限的感知范圍和分析能力的傳感器,RFID。
3、場景分析(Scene analysis),利用場景畫面中的特征完成定位分析,點云和3D重構技術,機器視覺。
4、航位推算(Dead reckoning),基于先驗信息推算出運動軌跡,慣導、捷聯慣導。
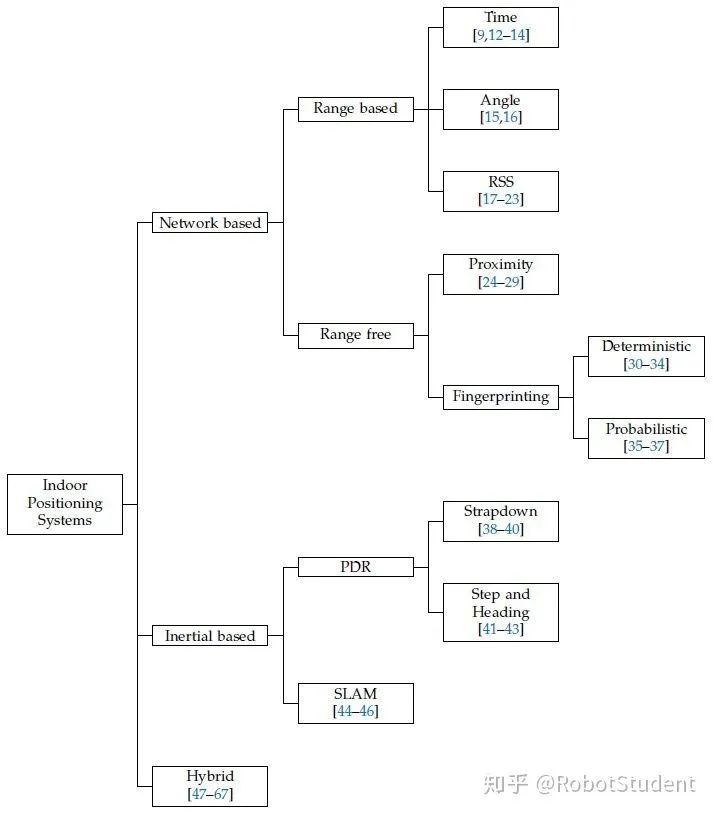
定位算法
按照文獻[5],基于靜態傳感器節點的定位技術廣泛應用于移動機器人跟蹤功能,定位算法可總結為:
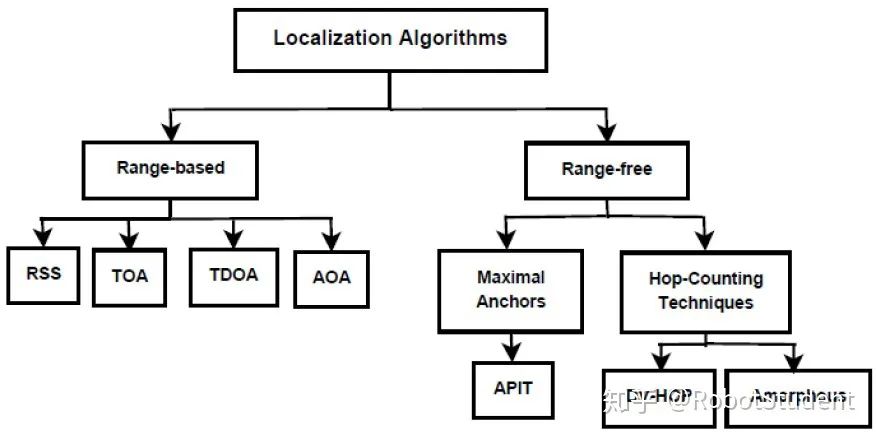
1、范圍基定位(Range-based localization)
time-of-arrival (TOA) – based 定位. 聯合最小二乘估計?the Least-Square Estimate
time-difference-of-arrival (TDOA) – based 定位. 協同定位
Angle-of-arrival (AOA) – based 定位.
received signal strength (RSS) – based 定位,聯合最大似然估計Maximum likelihood estimate
MDS Based 定位,聯合奇異值分解 Singular Value Decomposition (SVD)
Channel Impulse Response Based fingerprinting 定位
2、無范圍基定位(Range-free localization)
Approximate Point in Triangle Test (APIT)
Centroid-based 定位
Monte-Carlo 定位
DV-Hop based 定位
Closer point based 定位
Based Coordinates (ABC) localization method
定位計算補償方法Implementation methods
1、機器學習方法?Machine Learning Based Methods:
least square support vector machine and Gaussian processes ,Semi-supervised Laplacian regularized least squares method and HMM based RSS-EKF (Extended Kalman Filter) method using RSS
2、集中和分布式方法Centralized and Distributed Methods
3、多傳感器數據融合方法Multi-Sensor Data Fusion Methods
4、采指紋方法Fingerprinting Based Methods
跟蹤算法分類(Broad classification of tracking methods):
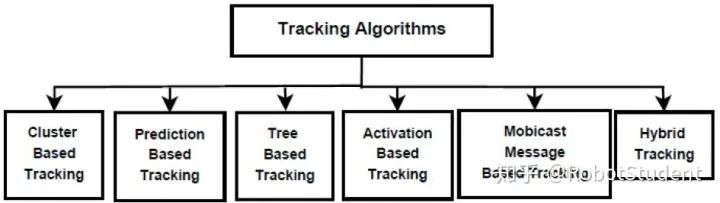
1、聚類跟蹤算法?Cluster-based tracking methods, dynamic clustering algorithm for target tracking
2、預測跟蹤算法?Prediction-based tracking methods
3、樹基跟蹤算法?Tree-based tracking methods
4、主動跟蹤算法?Activation-based tracking method
5、Mobicast基跟蹤算法?Mobicast-based tracking method
室內定位方法評價
1、精度與誤差
2、環境適應性。場景對定位系統測量精度影響,一個高性能框架能夠避免對重復定位差異
3、消耗:帶寬、壽命、能耗、權重與額外設備
4、基站數量
基于慣導的定位系統
慣性導航與定位技術可以分為兩類:
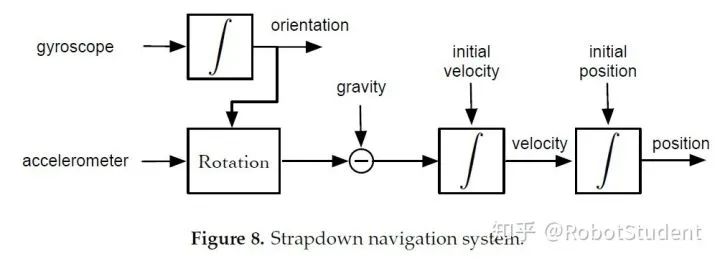
捷聯慣導系統Strapdown systems: 采用兩次積分預測運動
步進與航向系統Step and Heading Systems (SHS): 通過表示步進長度與航向的慣性定位向量預測位置
參考下圖,慣導定位系統通過二次積分獲得定位信息[6]
一個經典的具有定位功能的移動機器人控制系統架構如下圖所示,該系統通過無線電、里程計以及慣性測量單元實現自定位功能[7]。
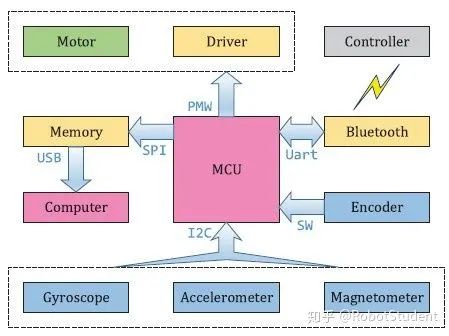
微型慣性測量單元,包括陀螺儀、加速度計、磁偏角計、溫度和氣壓等功能,通過物理模型和誤差模型推算。
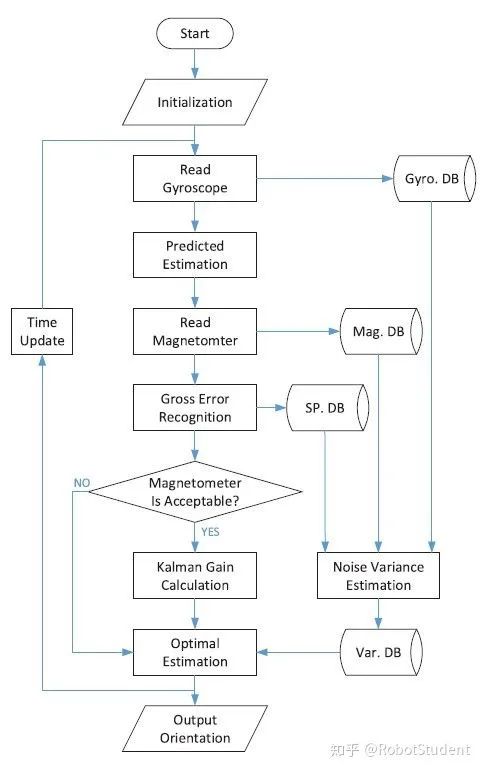
擴展卡爾曼濾波算法EKF與粒子濾波器是移動機器人群體定位中最為廣泛,尤其在RoboCup等機器人大賽[7]。
基于無線電定位系統
最流行的室內無線電點位技術方法為RSSI定位算法,是采用AP終端設備組件的網絡,通過檢測信號功率推算距離,再利用定位模型獲取定位信息,最常見的終端是ZigBee。
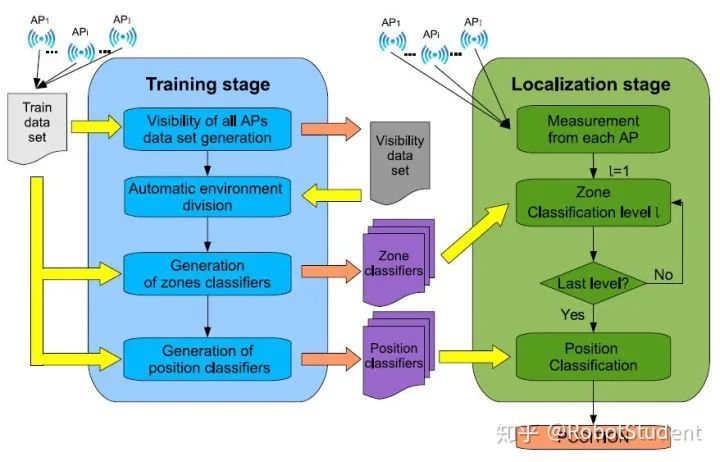
參考[8]
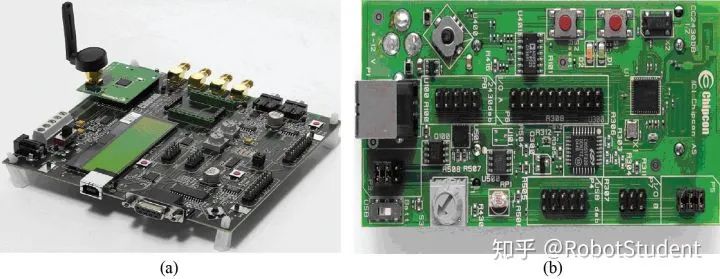
基于ZigBee組件的微型定位系統
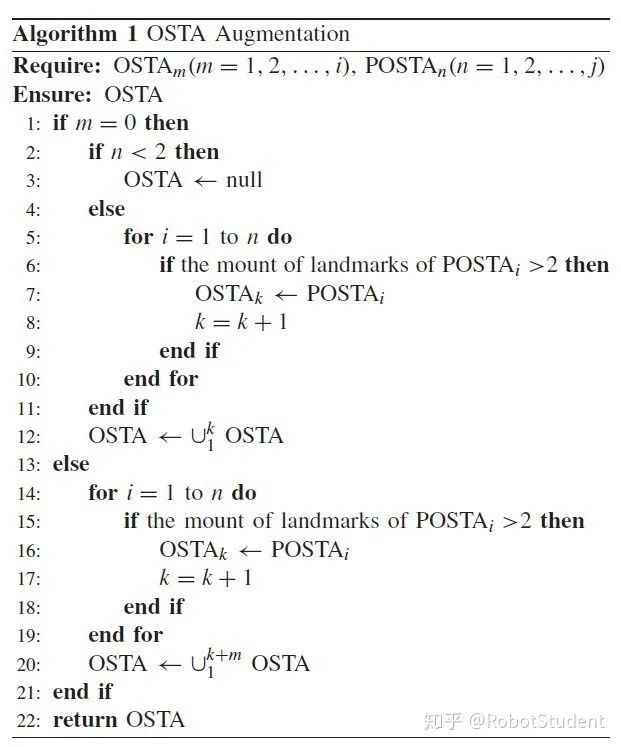
集群定位系統
參考文獻[9][10],集群類機器人定位技術,不僅可以依靠靜態基站進行定位,還可以利用機器人之間無線電終端輔助其它終端進行定位。

算法1 [9]
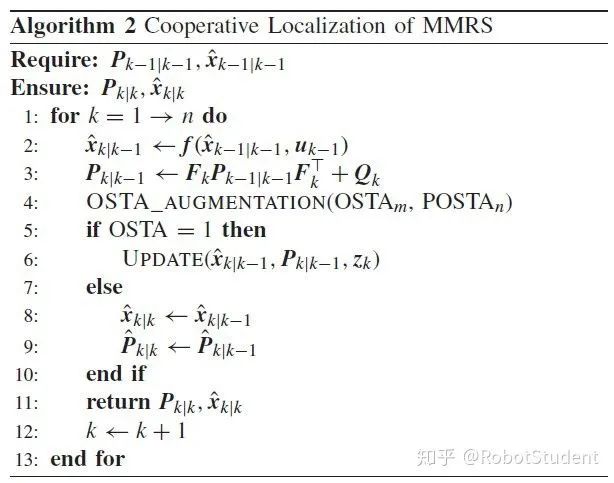
因為集群定位存在很大的噪聲干擾,因此需要對采集到的信息進行去噪處理,或者提高系統抗干擾能力,采用統計算法提高定位系統精度。如在文獻[10],采用了卡爾曼濾波器對定位優化。
文獻[10]-算法1
文獻[10]-算法2
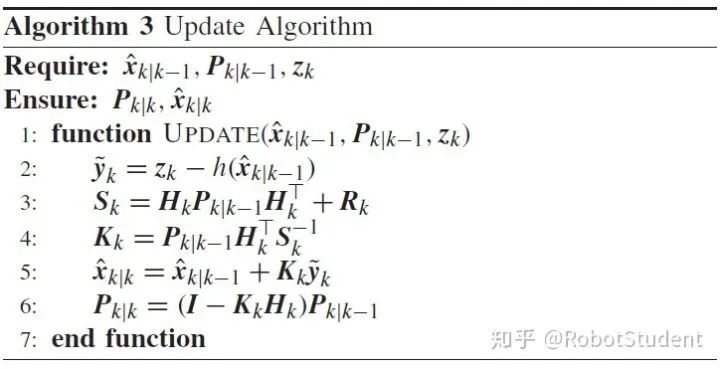
文獻[10]-算法3
總結
本文大部分內容是根據綜述文章對現用的室內定位進行總結,考慮到微型運動機器人的工程成本以及計算力,本文所討論的室內定位技術并不是應用于自動駕駛的SLAM和VSLAM技術。
同時,本文提到了定位跟蹤技術,在尋跡控制中個人傾向采用視覺方向。對于粗精度的定位系統,可以采用基于ZigBee的RSSI定位系統,此外可以融合IMU單元提高系統定位精度。
參考文獻:
[1] Torres-Solis, J., H., T., and Chau, T., 2010, “A Review of Indoor Localization Technologies: Towards Navigational Assistance for Topographical Disorientation,”?Ambient Intelligence, F.J. Villanueva Molina, ed., InTech.
[2] Kivim?ki, T., Vuorela, T., Peltola, P., and Vanhala, J., 2014, “A Review on Device-Free Passive Indoor Positioning Methods,” International Journal of Smart Home,?8(1), pp. 71–94.
[3] Alejandro Correa, Marc Barcelo, Antoni Morell, and Jose Vicario, 2017, “A Review of Pedestrian Indoor Positioning Systems for Mass Market Applications,” Sensors,?17(8), p. 1927.
[4] Mrindoko, N. R., and Minga, D. L. M., 2016, “A Comparison Review of Indoor Positioning Techniques,”?21(1), p. 9.
[5] Kumar, S., and Hegde, R. M., “A Review of Localization and Tracking Algorithms in Wireless Sensor Networks,” p. 12.
[6] Lv, W., Kang, Y., and Qin, J., 2019, “Indoor Localization for Skid-Steering Mobile Robot by Fusing Encoder, Gyroscope, and Magnetometer,” IEEE Transactions on Systems, Man, and Cybernetics: Systems,?49(6), pp. 1241–1253.
[7] Li, D., Chen, Q., and Zeng, Z., 2018, “Self-Localization Algorithm of Mobile Robot Based on Unscented Particle Filter,”?2018 37th Chinese Control Conference (CCC), IEEE, Wuhan, pp. 5459–5464.
[8] Hernández, N., Alonso, J. M., and Oca?a, M., 2017, “Fuzzy Classifier Ensembles for Hierarchical WiFi-Based Semantic Indoor Localization,” Expert Systems with Applications,?90, pp. 394–404.
[9] Safavi, S., and Khan, U. A., 2017, “An Opportunistic Linear–Convex Algorithm for Localization in Mobile Robot Networks,” IEEE Transactions on Robotics,?33(4), pp. 875–888.
[10] Sun, Q., Tian, Y., and Diao, M., 2018, “Cooperative Localization Algorithm Based on Hybrid Topology Architecture for Multiple Mobile Robot System,” IEEE Internet of Things Journal,?5(6), pp. 4753–4763.
編輯:黃飛
?

















 工商網監
工商網監
評論