 【科普】干貨!帶你從0了解移動機器人(四) ——移動機器人導航技術
【科普】干貨!帶你從0了解移動機器人(四) ——移動機器人導航技術
移動機器人導航是指移動機器人確定自己在地圖參考系中的位置后,自動規劃出通往地圖參考系中某個目標位置路徑并沿著該路徑到達目標位置點的能力,是移動機器人行動能力的關鍵。
基于整個智能制造的發展,移動機器人導航技術大致可分為以下幾種:
1
激光導航
激光導航分為激光反光板導航與激光自然導航兩種方式:
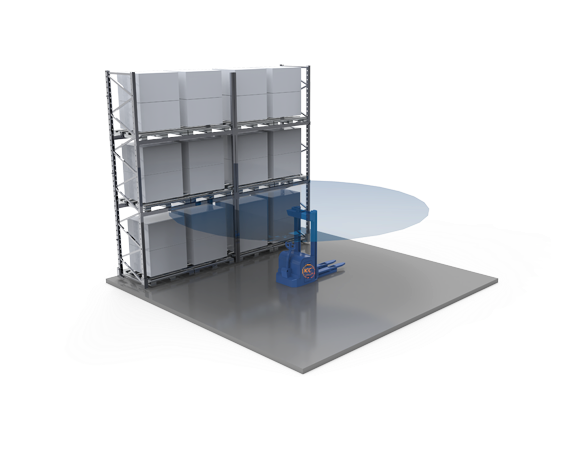
1、激光自然導航
激光自然導航是一種無需使用反射板的自然導航方式,它不再需要通過輔助導航標志(二維碼、反射板等),而是通過工作場景中的自然環境。如:倉庫中的柱子、墻面等作為定位參照物以實現定位導航。
2、激光反射板導航激光導航優點:移動機器人(AGV/AMR)定位精確,地面無需其他定位設施行駛路徑可靈活多變,能夠適合多種現場環境,它是目前國內外許多AGV生產廠家優先采用的先進導航方式。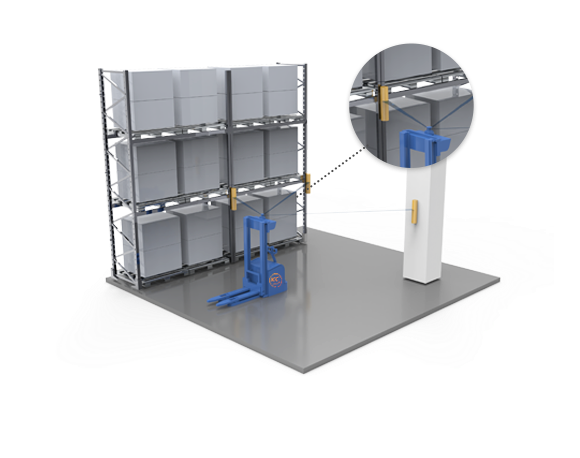 激光導航優點:激光導航的方式使得AGV能夠靈活規劃路徑,定位準確,精度高,行駛路徑靈活多變,施工較為方方便,能夠適應各種使用環境。
激光導航優點:激光導航的方式使得AGV能夠靈活規劃路徑,定位準確,精度高,行駛路徑靈活多變,施工較為方方便,能夠適應各種使用環境。
2
二維碼導航
二維碼導航屬于視覺識別,實現原理是在地面鋪設二維碼陣列,通過移動機器人(AGV/AMR)下方的相機掃描二維碼實現機器人的定位。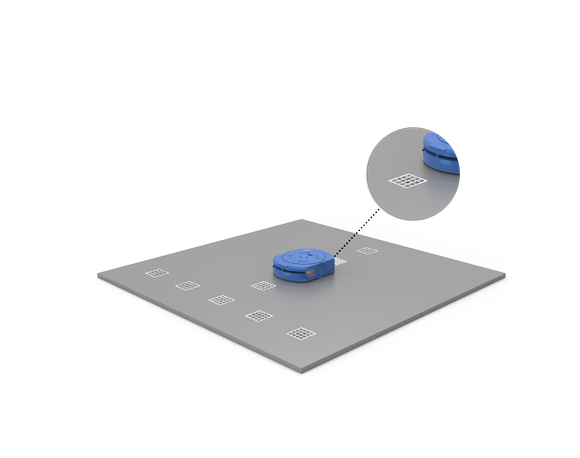 二維碼導航優點:位置準確,小巧玲瓏,鋪設、更換路徑更容易,控制通訊方便,不必擔心聲光干擾。
二維碼導航優點:位置準確,小巧玲瓏,鋪設、更換路徑更容易,控制通訊方便,不必擔心聲光干擾。
3
磁導航
磁導航的原理是在移動機器人(AGV/AMR)行駛路徑上埋置金屬線,給金屬線加載導航頻率,通過機器人上的電磁感應線圈來感應磁場的強弱,進行識別和跟蹤。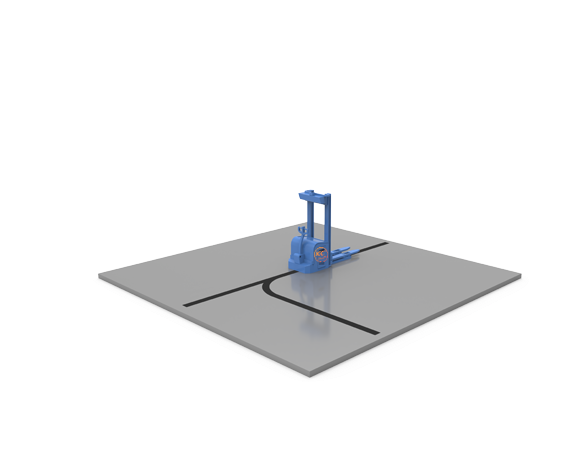
磁導航優點:簡單穩定且成本不高,技術成熟可靠,對于聲光無干擾性,AGV運行線路明顯性。線路二次變更容易、變更成本低、變更周期短。
4
色帶導航
色帶導航通過視覺傳感器(或組合式的色標傳感器),檢測事先鋪設在地面的色帶與移動機器人(AGV/AMR)的相對位置,從而使小車沿既定路線(色帶)行駛。
色帶導航優點:鋪設容易改路徑,成本低.
5
GNSS導航
通過GNSS導航模塊接收GPS衛星信號進行導航定位。一般采用偽距差分動態定位法,用基準接收機和動態接收機共同觀測4顆GPS衛星,按照一定的算法即可求出某時某刻機器人的三維位置坐標。差分動態定位消除了星鐘誤差,對于在距離基準站1000km的用戶,可以消除星鐘誤差和對流層引起的誤差,因而可以顯著提高動態定位精度。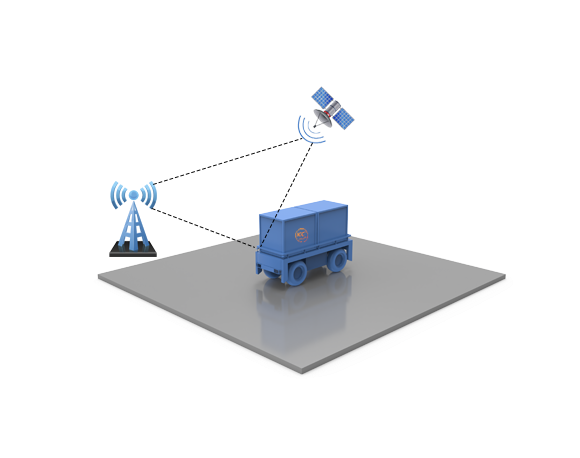
GNSS導航優點:通常用于室外遠距離的跟蹤和制導,其精度取決于衛星在空中的固定精度和數量,以及控制對象周圍環境等因素。
6
混合導航
混合導航是多種導航的集合體,該導航方式是根據現場環境的變化應運而生的。由于現場環境的變化導致某種導航暫時無法滿足要求,進而切換到另一種導航方式繼續滿足AGV連續運行。 混合導航優點:二維碼+激光,激光+磁等多種方式,可適應各種復雜場景,定位精度高。
混合導航優點:二維碼+激光,激光+磁等多種方式,可適應各種復雜場景,定位精度高。
-
機器人
+關注
關注
212文章
29421瀏覽量
211279 -
移動機器人
+關注
關注
2文章
784瀏覽量
33976
發布評論請先 登錄
安森美在自主移動機器人領域的發展成果
慣性測量單元傳感器在自主移動機器人的應用

2024移動機器人市場風云:新玩家批量涌現,是挑戰還是機遇
移動機器人核心科技解碼:導航、感知與掌控力的深度剖析
思嵐科技榮獲雙年度移動機器人優質供應鏈獎
移動機器人的技術突破和未來展望

智能移動機器人系統方案指南

新松移動機器人批量進軍歐洲新能源市場
智能移動機器人

如何借助恩智浦MCX系列MCU糾錯功能,打造可靠安全的移動機器人?

智能移動機器人系統的用途和市場趨勢
自動停車機器人,如何快速構建?






 工商網監
工商網監
評論