由于DSP將超強的高速實時處理能力和豐富的外設(shè)功能集于一身,目前,以DSP為核心的嵌入式運動控制器已經(jīng)成為開放式運動控制器的發(fā)展主流,并獲得廣泛的應(yīng)用。本文通過 對運動控制
2011-10-24 16:09:54 2606
2606 
本設(shè)計采用傳統(tǒng)的視日運動跟蹤法,利用Xilinx公司提供的FPGA開發(fā)環(huán)境ISE,設(shè)計完成了基于XC3S1500開發(fā)板的太陽能自動跟蹤系統(tǒng),以實現(xiàn)對太陽的全天候、全自動、實時精確控制。
2011-10-27 15:46:072543 
而運動控制(包括軌跡控制、伺服控制)與順序控制、過程控制,傳動控制并列為典型的控制模式,是一直以來扮演重要支柱技術(shù)角色的自動控制系統(tǒng),在許多高科技領(lǐng)域得到了非常廣泛的應(yīng)用,如激光加工,機器人
2020-06-26 09:27:002058 
本帖最后由 mr.pengyongche 于 2013-4-30 03:09 編輯
DSP+FPGA在高速高精運動控制器中的應(yīng)用 摘要:數(shù)字信號處理器具有高效的數(shù)值運算能
2012-12-28 11:20:34
本帖最后由 mr.pengyongche 于 2013-4-30 02:57 編輯
FPGA+DSP 在空中背景下運動目標實時跟蹤系統(tǒng)中的應(yīng)用 摘要:針對電視跟蹤系統(tǒng)對飛行目標的檢測與跟蹤受到速度瓶頸
2012-12-28 11:19:07
,利用高性能微處理器(如DSP)及大規(guī)模可編程器件實現(xiàn)多個伺服電機的多軸協(xié)調(diào)控制的一種高性能的步進/伺服電機運動控制卡包括脈沖輸出、脈沖計數(shù)、數(shù)字輸入、數(shù)字輸出、D/A輸出等功能,它可以發(fā)出連...
2021-06-28 07:54:00
伺服電機的運動伺服是由哪幾環(huán)組成的?PID對三環(huán)控制系統(tǒng)的差值調(diào)節(jié)有何影響?
2021-09-28 06:22:32
運動控制卡是什么?運動控制卡有何功能?伺服驅(qū)動器是什么?伺服驅(qū)動器有哪幾種控制方式?
2021-10-09 08:17:42
運動控制器控制伺服電機的指令方式運動控制器以模擬量信號控制伺服電機的調(diào)試步驟
2021-01-21 07:15:51
和靈活性,可實時完成運動控制過程中復雜的邏輯處理和控制算法,能實現(xiàn)多軸高速高精度的伺服控制。本文選用DSP與FPGA作為運動控制器的核心部件,設(shè)計了通用型運動控制器。其中DSP用于運動軌跡規(guī)劃、速度控制
2019-07-31 08:15:26
基于雙DSP的運動目標智能跟蹤系統(tǒng)是怎樣設(shè)計并實現(xiàn)的?
2021-04-27 06:59:18
ICM 20602是什么?ICM 20602運動跟蹤裝置有哪些功能?ICM 20602運動跟蹤裝置有哪些應(yīng)用?
2021-11-01 07:57:52
`不知道有沒有大神玩過,用labview控制雷賽的運動控制卡,進而控制伺服電機。前幾天用的好好的,不知道從什么時候開始,labview無法控制了。而這個運動控制卡自帶的例程(應(yīng)該是用C語言寫的),還能正常控制。請問問題可能出在什么地方??`
2017-03-02 10:15:36
和主控器通信。基于DSP的運動算法控制卡處理主要各個關(guān)節(jié)的運動坐標,速度參數(shù),以及伺服電流參數(shù),對伺服給予插補后的實時運動參數(shù),以及軸坐標,姿態(tài)控制角度等。期間用到各種移位寄存器,乘法器等DSP硬件支持。
2015-09-10 11:09:13
控制卡能同時輸出四路PWM波,控制伺服電機運行在位置模式下,并能實現(xiàn)梯形或S形加速度曲線運動。通過軟件編程,進行插補計算,能實現(xiàn)兩軸直線插補和圓弧插補。該運動控制卡由四部分電路組成:PCI總線接口電路、DSP運動控制電路、編碼器及DSP與PCI通訊電路、I/O信號輸入輸出電路。
2015-10-29 14:14:42
申請理由:1、計算量大,計算復雜,實時性要求高,要求速度快,C6748能為復雜算法事實計算處理提供保障。2、要求專門用于電機控制點的DSP,完成運動控制的規(guī)劃和插補計算。項目描述:基于嵌入式雙核OMAP-L138和可編程器件FPGA的數(shù)控系統(tǒng)方案,要求具有高性能,模塊化,系統(tǒng)更易操作和移植的特點
2015-09-09 17:03:56
USS是什么意思?USS通信與串口通信區(qū)別在什么地方?運動控制器PLC的結(jié)構(gòu)是如何構(gòu)成的?什么是伺服驅(qū)動器 ?
2021-06-28 08:03:17
各位好,請問我想用NI的運動控制板卡控制兩臺伺服驅(qū)動器,采用最簡單的脈沖控制方式。NI的板卡選用PCI7390,不知是否合適,如不合適,還請各位指出更合適的控制器,謝謝!
2018-01-11 09:57:37
使用基于PC的控制軟件、EtherCAT網(wǎng)絡(luò)、集成驅(qū)動器和單電纜技術(shù)進行配置,可簡化運動控制系統(tǒng)設(shè)計,并降低伺服電機成本。 無論是改造項目還是新應(yīng)用,選擇和安裝最佳伺服電機,都不是一項簡單
2023-03-03 16:04:20
數(shù)控系統(tǒng)的發(fā)展趨勢。本運動控制器采用TI公司的高性能浮點DSP作為主控芯片,通過ISA接口與PC協(xié)調(diào)并進行數(shù)據(jù)交換,以PC計算機作為基本平臺,以DSP高速運動控制卡作細插補、伺服控制的核心,對直線電機的運動進行控制,取得了良好的實際應(yīng)用效果。
2019-06-18 06:39:25
數(shù)控系統(tǒng)的發(fā)展趨勢。本運動控制器采用TI公司的高性能浮點DSP作為主控芯片,通過ISA接口與PC協(xié)調(diào)并進行數(shù)據(jù)交換,以PC計算機作為基本平臺,以DSP高速運動控制卡作細插補、伺服控制的核心,對直線電機的運動進行控制,取得了良好的實際應(yīng)用效果。
2019-06-18 08:13:08
和網(wǎng)絡(luò)技術(shù)的不斷發(fā)展,運動控制器已從以單片機和微處理器作為核心的運動控制器和以專用芯片(ASIC)作為核心處理器的運動控制器,發(fā)展到了基于PC機平臺的以數(shù)字信號處理器(DSP)和現(xiàn)場可編程門陣列
2019-09-04 07:10:42
和網(wǎng)絡(luò)技術(shù)的不斷發(fā)展,運動控制器已從以單片機和微處理器作為核心的運動控制器和以專用芯片(ASIC)作為核心處理器的運動控制器,發(fā)展到了基于PC機平臺的以數(shù)字信號處理器(DSP)和現(xiàn)場可編程門陣列
2019-08-30 08:27:17
基于DSP與FPGA的運動控制器設(shè)計 設(shè) 計 了 一 種 基 于 和 的 四 軸 伺 服 電 機 運 動 控 制 器 該 控 制 器 選 用 與 作為 核 心 部 件 針 對 運 動 控 制 中
2012-08-11 11:54:11
擴充使用;具有較高的集成度和靈活性。 關(guān)鍵詞: 運動控制;伺服控制;DSP;FPGA 運動控制技術(shù)是數(shù)控機床的關(guān)鍵技術(shù),其技術(shù)水平的高低將直接影響一個國家裝備制造業(yè)的發(fā)展水平。目前,多軸伺服
2009-09-19 09:43:00
視覺、交通監(jiān)測、可視預(yù)警、機器導航等民用領(lǐng)域有著廣泛的應(yīng)用,同時在火力攔截、導彈電視和紅外視頻制導等軍用方面也發(fā)揮著重要作用。基于二維轉(zhuǎn)臺以DSP和FPGA為核心器件構(gòu)成的視頻識別和跟蹤裝置,可工作于
2019-06-26 06:09:46
目前伺服控制器的設(shè)計多以DSP或MCU為控制核心,但DSP的靈活性不如FPGA,且在某些環(huán)境比較惡劣的條件如高溫高壓下DSP的應(yīng)用效果會大打折扣,因此以FPGA為控制核心,對應(yīng)用于機載三軸伺服控制平臺的控制器進行了設(shè)計與優(yōu)化。
2019-07-16 07:41:04
目前伺服控制器的設(shè)計多以DSP或MCU為控制核心,但DSP的靈活性不如FPGA,且在某些環(huán)境比較惡劣的條件如高溫高壓下DSP的應(yīng)用效果會大打折扣,因此以FPGA為控制核心,對應(yīng)用于機載三軸伺服控制平臺的控制器進行了設(shè)計與優(yōu)化。
2019-07-08 06:28:36
1 引言 利用可見光成像與紅外成像傳感器實現(xiàn)實時目標成像跟蹤是精確制導武器及機載成像光電系統(tǒng)研究的核心技術(shù)。伴隨著實戰(zhàn)環(huán)境日益復雜以及偽裝、隱身等目標特性控制技術(shù)的飛速發(fā)展,機載實時圖像跟蹤
2019-07-02 06:57:27
本文設(shè)計了一種基于神經(jīng)網(wǎng)絡(luò)控制算法的伺服運動控制卡。
2021-06-03 06:05:09
利用可見光成像與紅外成像傳感器實現(xiàn)實時目標成像跟蹤是精確制導武器及機載成像光電系統(tǒng)研究的核心技術(shù)。伴隨著實戰(zhàn)環(huán)境日益復雜以及偽裝、隱身等目標特性控制技術(shù)的飛速發(fā)展,機載實時圖像跟蹤系統(tǒng)的應(yīng)用也日益廣泛與深入。當跟蹤目標并非一般地面慢速目標,而是其它快速運動目標?
2019-09-03 07:06:05
的邏輯處理和控制算法,能實現(xiàn)多軸高速高精度的伺服控制。利用DSP與FPGA設(shè)計運動控制器,其中DSP用于運動軌跡規(guī)劃、速度控制及位置控制等功能;FPGA完成運動控制器的精插補功能,用于精確計算步進電機或伺服驅(qū)動元件的控制脈沖,同時接收并處理脈沖型位置反饋信號。那么,我們具體該怎么做呢?
2019-08-06 06:27:00
作者:李木國 彭平良0 引言傳統(tǒng)的運動控制卡多采用單片機作為微處理器, 通過一些大規(guī)模集成電路實現(xiàn)對伺服電機的控制。由于其結(jié)構(gòu)較為復雜,因此在工作時,存在高頻響應(yīng)慢、控制精度低等缺點。本文提出一種以
2019-07-30 06:07:06
系統(tǒng)用ARM+FPGA實現(xiàn),控制步進或伺服電機運動,ARM型號?+FPGA型號? 集成芯片? 請教大神給個方案!!!
2015-11-18 10:30:29
小。位置控制精度高:動態(tài)跟蹤誤差小,高速下進行快速定位,無拖尾,停止時無抖動。六種控制模式: 速度模式 位置模式 轉(zhuǎn)矩模式 速度/位置切換模式 轉(zhuǎn)矩/速度切換模式 位置/轉(zhuǎn)矩切換模式
2015-12-14 12:05:57
小。位置控制精度高:動態(tài)跟蹤誤差小,高速下進行快速定位,無拖尾,停止時無抖動。六種控制模式: 速度模式 位置模式 轉(zhuǎn)矩模式 速度/位置切換模式 轉(zhuǎn)矩/速度切換模式 位置/轉(zhuǎn)矩切換模式
2016-01-03 20:28:47
EtherCAT總線擴展模塊包含哪些?怎樣去使用正運動技術(shù)運動控制器EtherCAT總線?
2021-09-27 08:34:04
基于DSP/FPGA的運動控制器該如何去設(shè)計?
2021-05-25 06:49:01
要求是:采用CMOS攝像頭高速采集圖像信息,利用FPGA對圖像進行運動目標跟蹤算法處理,得到目標的大小、位置、輪廓等信息,來驅(qū)動兩自由度伺服舵機云臺,使攝像頭對目標進行跟蹤,同時可實現(xiàn)VGA同步顯示
2016-05-10 15:36:09
集運動控制器、機器人控制系統(tǒng)和六軸伺服驅(qū)動于一體
? 體積小、功率密度高、集成度高,適合20KG以下機器人 ? 采用多自由度和非線性控制算法,實現(xiàn)高動態(tài)響應(yīng)、高精度的電流、速度及位置控制? 支持
2023-09-07 07:57:07
精密機械技術(shù)、計算機及控制技術(shù)、激光干涉測距技術(shù)、光電探測技術(shù)、現(xiàn)代數(shù)值計算理論等各種先進技術(shù),能對空間運動目標進行跟蹤并實時測量目標的空間三維坐標。 &
2022-06-22 17:56:06
本文是在基于ARM+FPGA 的硬件平臺上進行嵌入式運動控制系統(tǒng)的設(shè)計,ARM實現(xiàn)應(yīng)用管理,FPGA 實現(xiàn)插補運算,發(fā)出脈沖到伺服驅(qū)動系統(tǒng),形成運動指令控制伺服電機運 轉(zhuǎn)等。文
2009-06-01 15:09:27 27
27 提出了一種以多個DSP 和FPGA 為核心器件構(gòu)成的視頻檢測與跟蹤裝置設(shè)計方案。該視頻檢測與跟蹤裝置,可利用電視圖像或紅外圖像兩個波段跟蹤,采用形心跟蹤和相關(guān)匹配跟蹤兩
2009-06-20 09:12:1521 基于MCU和DSP的運動控制系統(tǒng)由于結(jié)構(gòu)緊湊、環(huán)境適應(yīng)性好而有良好的發(fā)展前景。由于PC機與MCU和DSP資源環(huán)境差異較大,進行MCU和DSP環(huán)境中的運動控制技術(shù)研究十分必要。基于MCU和DSP的
2009-09-23 11:13:5611 本文介紹了基于TMS320F2812 三軸跟蹤轉(zhuǎn)臺伺服控制系統(tǒng)的設(shè)計與實現(xiàn)。采用“交流伺服電機+減速器”代替轉(zhuǎn)臺傳統(tǒng)的直流力矩電機直接驅(qū)動負載的方式;運用DSP 和CAN 總線技術(shù);利用
2009-09-26 08:18:0616 為了滿足CNC齒輪測量中心的測量精要求,針對定點數(shù)字信號處理器(DSP)TMS320LF2407A的特點,設(shè)計一種以DSP運動控制為核心的運動控制系統(tǒng)。該系統(tǒng)通過DSP內(nèi)部集成的A/D轉(zhuǎn)換模塊對傳
2010-02-11 12:23:3379 介紹了一種以DSP為核心的數(shù)字式電視跟蹤系統(tǒng), 主要研究了利用FPGA控制、處理數(shù)字視頻信號的方法,實現(xiàn)了實時的視頻疊加。詳細討論了FPGA的控制邏輯及其相關(guān)部分結(jié)構(gòu)。采用FPGA實
2010-08-06 17:15:0514 運動控制器已經(jīng)從以單片機或微處理器作為核心的運動控制器和以專用芯片(ASIC)作為核心處理器的運動控制器,發(fā)展到了基于PC總線的以DSP和FPGA作為核心處理器的開放式運動控
2010-10-07 15:30:3876 為提高聚光光伏發(fā)電的太陽能利用率,提出了一種環(huán)形軌道式光伏發(fā)電雙軸跟蹤系統(tǒng)的設(shè)計方案。系統(tǒng)采用DSP控制伺服電機的方法,利用空間電壓矢量脈寬調(diào)制(SVPWM)技術(shù),形成了
2010-10-15 16:34:3835 DSP和FPGA組成的伺服控制系統(tǒng)能夠滿足復雜的控制算法要求。通過對TI公司的DSP控制芯片TMS320F2812和ALTERA公司的FPGA芯片EP1C3T144的功能和特點分析,給出了一種基于DSP和FPGA的光電經(jīng)緯儀
2010-11-11 15:57:5635 圖1 嵌入式運動目標智能跟蹤系統(tǒng)功能圖摘
2006-03-11 12:23:30524 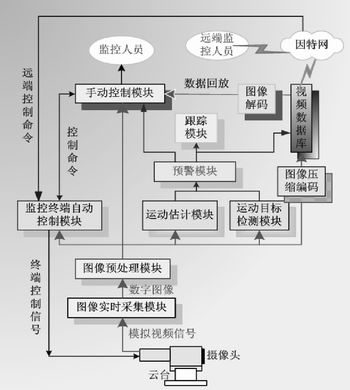
基于DSP與FPGA的運動控制器設(shè)計
運動控制技術(shù)是數(shù)控機床的關(guān)鍵技術(shù),其技術(shù)水平的高低將直接影響一個國家裝備制造業(yè)的發(fā)展水平。目前,多軸伺服控制器越來越多地
2009-10-25 15:28:471363 基于DSP的運動控制器的開發(fā)
運動控制器是一種用于多種運動控制場合的上位控制單元,通常采用專業(yè)運動控制芯片或高速DSP來控制步進電機或伺服電機。運動控制器
2009-12-25 09:44:071964 
目前伺服控制器的設(shè)計多以DSP或MCU為控制核心,但DSP的靈活性不如FPGA,且在某些環(huán)境比較惡劣的條件如高溫高壓下DSP的應(yīng)用效果會大打折扣,因此以FPGA為控制核心,對應(yīng)用于
2010-09-24 08:56:181099 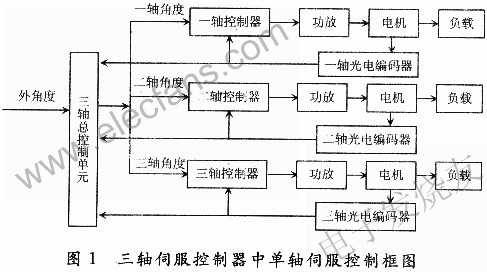
摘要:針對數(shù)控系統(tǒng)的工作特點和要求,通過對TI公司新推出的DSP芯片TMS320F2812和ALTERA公司的FPGA芯片EP1K30功能和特點的深入分析,給出了一種基于DSP和FPGA的運動控制卡的設(shè)計與實現(xiàn)。在充分考慮上述芯片特點和資源的基礎(chǔ)上,該卡采用DSP和FPGA取代單片機
2011-02-27 13:29:19104 為了更充分、高效地利用太陽能, 設(shè)計了基于PLC的雙軸伺服太陽能跟蹤系統(tǒng)。該系統(tǒng)采用視日運動軌跡跟蹤方案, 控制器根據(jù)相關(guān)的公式和參數(shù)計算出白天太陽的位置, 再將高度角和方位
2011-09-02 17:36:30169 通過對DSP芯片(TMS320VC33)、PCI9052接口芯片和伺服控制卡的功能和結(jié)構(gòu)特點進行深入分析,設(shè)計了一種基于PCI總線的DSP伺服控制卡。實踐證明,本文所設(shè)計的伺服控制卡能夠滿足目前控制系
2011-09-27 17:21:2139 設(shè)計了一種基于DSP與FPGA的運動控制器。該控制器以DSP為控制核心,用FPGA構(gòu)建運動控制器與傳感器以及電機驅(qū)動器的接口電路。充分發(fā)揮了DSP強大的運算能力和FPGA的并行處理能力。具有
2012-10-26 15:21:5193 介紹了一種船載光電穩(wěn)定跟蹤伺服系統(tǒng),著重介紹了功率驅(qū)動器與基于TMS320F28335 DSP的數(shù)字伺服控制器的設(shè)計與實現(xiàn),簡單介紹了系統(tǒng)軟件設(shè)計和電磁兼容設(shè)計。工程實踐結(jié)果表明:該系
2013-07-25 11:50:4541 提出了一種基于DSP和FPGA 的通用型運動控制系統(tǒng)!大大降低了系統(tǒng)成本
2013-09-23 17:49:3759 基于DSP的多軸運動控制器的研究與設(shè)計。
2016-03-29 14:11:486 基于DSP的伺服控制系統(tǒng)設(shè)計與實現(xiàn),有興趣的同學可以下載學習
2016-04-26 18:16:4240 基于DSP與FPGA的運動控制器設(shè)計,下來看看。
2016-05-10 11:24:3329 直驅(qū)XY平臺伺服系統(tǒng)預(yù)測魯棒輪廓跟蹤控制_趙希梅
2017-01-07 15:26:081 基于DSP的直流位置伺服控制系統(tǒng)
2017-02-08 02:01:2424 隨著先進制造技術(shù)的迅速發(fā)展,對運動控制的精度要求也越來越高,而運動伺服控制系統(tǒng)的性能很大程度上取決于伺服控制算法,通過運動控制與智能控制的融合
2017-09-01 11:32:214 設(shè)計了一種基于DSP 和FPGA 的四軸伺服電機運動控制器,該控制器選用DSP 與FPGA 作為核心部件。針對運動控制中的一些具體問題,如高速、高精度、實時控制等,規(guī)劃了DSP 的功能擴展
2017-09-21 11:24:529 運動控制芯片AFD-X05是基FPGA實現(xiàn)的芯片,能夠完成高速高精度的數(shù)控加工。其運動控制的穩(wěn)定性和可靠性要比DSP系統(tǒng)或基于DSP技術(shù)的運動控制芯片如MCX314等要高一個等級。
2017-09-25 17:49:3536 一、運動控制技術(shù)進展 現(xiàn)代運動控制是一個綜合性、多學科交叉的研究領(lǐng)域 ,是機電一體化的核心部分,隨著計算機技術(shù)、電子電力技術(shù)和傳感器技術(shù)的發(fā)展,發(fā)達國家的機電一體化產(chǎn)品層出不窮。機電控制技術(shù)已越來越
2017-10-16 17:35:1320 MCU和DSP的運動控制研究硬件平臺設(shè)計
2017-10-19 13:20:096 DSP的運動控制系統(tǒng)設(shè)計
2017-10-19 14:58:4212 基于DSP_FPGA與CAN總線的跟蹤控制器設(shè)計
2017-10-21 08:52:075 的邏輯處理和控制算法,能實現(xiàn)多軸高速高精度的伺服控制。本文選用DSP與FPGA作為運動控制器的核心部件,設(shè)計了通用型運動控制器。其中DSP用于運動軌跡規(guī)劃、速度控制及位置控制等功能;FPGA完成運動控制器的精插補功能,用于精確
2017-10-25 11:31:313 1 運動控制器硬件結(jié)構(gòu) 本運動控制器的硬件結(jié)構(gòu)主要分為如下幾個模塊:DSP+CPLD 主控模塊,包括 DSP 核心 模塊和 CPLD 驅(qū)動與擴展模塊;通信接口模塊,包括 PCI 總線、USB 總線
2017-11-03 10:30:472 隨著先進制造技術(shù)的迅速發(fā)展,對運動控制的精度要求也越來越高,而運動伺服控制系統(tǒng)的性能很大程度上取決于伺服控制算法,通過運動控制與智能控制的融合,從改進傳統(tǒng)的PID控制,到現(xiàn)代的最優(yōu)控制、自適應(yīng)控制
2017-11-03 11:41:041 基于MCU和DSP的運動控制系統(tǒng)由于結(jié)構(gòu)緊湊、環(huán)境適應(yīng)性好而有良好的發(fā)展前景。由于PC機與MCU和DSP資源環(huán)境差異較大, 進行MCU和DSP環(huán)境中的運動控制技術(shù)研究十分必要。 基于MCU和DSP
2017-11-03 16:07:241 高速度、高精度等優(yōu)點,廣泛應(yīng)用于復雜伺服控制領(lǐng)域 。以PC104PLIUS和CAN為總線接口,DSP為核心處理芯片,FPGA設(shè)計前端預(yù)處理電路及接口。此結(jié)構(gòu)的
2018-07-18 14:35:004894 
目前的光電跟蹤伺服系統(tǒng)大都采用PC/104結(jié)構(gòu),它是通過主控計算機完成對目標捕獲跟蹤功能,但是組成實際應(yīng)用的跟蹤伺服系統(tǒng)還要疊加多塊板卡,不僅增大了系統(tǒng)體積,而且精度難以提高,花費昂貴
2017-12-02 20:56:01279 本文首先介紹了伺服運動控制系統(tǒng)主要特點,其次介紹了伺服運動控制系統(tǒng)工作原理,最后從機器人移動方式的選擇與結(jié)構(gòu)設(shè)計、移動機器人運動控制系統(tǒng)及機器人的控制系統(tǒng)設(shè)計三個方面來詳細介紹機器人伺服運動控制系統(tǒng)設(shè)計,具體的跟隨小編一起來了解一下。
2018-06-01 14:19:3614964 技術(shù)需知伺服電機調(diào)試的基本步驟, 運動控制器控制伺服電機通常采用兩種指令方式: 1、數(shù)字脈沖 這種方式與步進電機的控制方式類似,運動控制器給伺服驅(qū)動器發(fā)送脈沖/方向或CW/CCW類型的脈沖指令信號
2020-06-12 14:45:485450 介紹了一種用基于FPGA的DSP技術(shù)來設(shè)計電液伺服系統(tǒng)控制器的方法。該方法克服了傳統(tǒng)伺服控制器的一些不足, 可將許多復雜的實時控制算法硬件化實現(xiàn), 并根據(jù)控制效果的優(yōu)劣調(diào)整控制算法, 從而
2020-11-30 14:02:002192 
基于DSP的永磁交流伺服控制系統(tǒng)開發(fā)(通信電源技術(shù)2017)-基于DSP的永磁交流伺服控制系統(tǒng)開發(fā) 本論文在分析了PMSM的結(jié)構(gòu)、運動原理及數(shù)學模型的基礎(chǔ)上,系統(tǒng)地闡述了PMSM交流伺服系統(tǒng)矢量
2021-09-28 09:58:0817 目前,理論界關(guān)于伺服控制概念的提法很多,但是,這些提法都同意伺服控制是指對物體運動的有效控制,即對物體運動的速度、位置、加速度進行控制。這種控制正在變得隨處可見和越來越普遍。
2022-10-26 17:26:541568 什么是伺服系統(tǒng)?以物體的位置、方向、狀態(tài)等為控制量,以跟蹤輸入目標值(或給定值)的任意變化為目的,所構(gòu)成的自動控制系統(tǒng)。
2023-05-04 11:44:56804 
目前伺服控制器的設(shè)計多以DSP或MCU為控制核心,但DSP的靈活性不如FPGA,且在某些環(huán)境比較惡劣的條件如高溫高壓下DSP的應(yīng)用效果會大打折扣,因此以FPGA為控制核心,對應(yīng)用于機載三軸伺服控制平臺的控制器進行了設(shè)計與優(yōu)化。
2023-09-04 16:53:01331 基于MCU和DSP的運動控制系統(tǒng)由于結(jié)構(gòu)緊湊、環(huán)境適應(yīng)性好而有良好的發(fā)展前景。由于PC機與MCU和DSP資源環(huán)境差異較大, 進行MCU和DSP環(huán)境中的運動控制技術(shù)研究十分必要。基于MCU和DSP的運動控制研究硬件平臺設(shè)計遵從運動控制系統(tǒng)的開放式、可重構(gòu)和網(wǎng)絡(luò)化的發(fā)展方向, 選用主流的M
2023-10-31 17:01:26394 電子發(fā)燒友網(wǎng)站提供《高性能運動控制的現(xiàn)代伺服技術(shù).pdf》資料免費下載
2023-08-01 09:44:201
 電子發(fā)燒友App
電子發(fā)燒友App


 ?
? 







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論