DSP與FPGA設(shè)計的跟蹤伺服運(yùn)動控制技術(shù)
摘 要: 在分析光電跟蹤伺服系統(tǒng)特點(diǎn)的基礎(chǔ)上,以TI公司DSP芯片TMS320F2812作為主控制芯片,采用FPGA進(jìn)行邏
2010-05-15 18:22:52 1420
1420 
運(yùn)動控制起源于早期的伺服控制,本文與讀者分享的是運(yùn)動控制的定義、運(yùn)動控制系統(tǒng)的基本架構(gòu)組成以及在運(yùn)動控制方面幾項(xiàng)運(yùn)動所需控制軌跡等
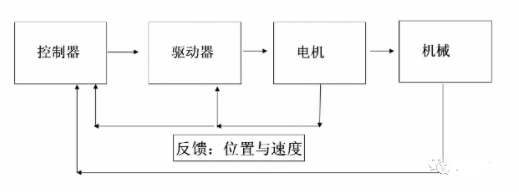
2013-04-07 10:47:253455 交流伺服系統(tǒng)包含交流伺服驅(qū)動器和伺服電機(jī)。選用伺服系統(tǒng),主要為了進(jìn)行精密的定位控制,伺服驅(qū)動器在位置控制模式下運(yùn)行,控制框圖如圖一所示。
2022-12-05 10:03:411734 運(yùn)動控制在實(shí)際的工業(yè)現(xiàn)場中隨處可見,也常聽到大家提到運(yùn)動控制;那什么叫運(yùn)動控制?以及基本概念有哪些?下面我們?yōu)榇蠹易龊唵蔚慕榻B 運(yùn)動控制(MC)是自動化的一個分支,它使用通稱為伺服機(jī)構(gòu)的一些
2023-05-06 10:14:201330 
運(yùn)動控制在實(shí)際的工業(yè)現(xiàn)場中隨處可見,也常聽到大家提到運(yùn)動控制;哪什么叫運(yùn)動控制?以及基本概念有哪些?下面我們?yōu)榇蠹易龊唵蔚慕榻B
2023-06-14 09:40:59312 
什么是伺服系統(tǒng)?伺服系統(tǒng)是由哪些部分組成的?伺服驅(qū)動器的原理是什么?伺服控制系統(tǒng)有哪幾種控制方式?
2021-10-11 08:03:33
1.定義伺服來自英文單詞“servo”,指系統(tǒng)跟隨外部指令進(jìn)行人們所期望的運(yùn)動,運(yùn)動要素包括位置、速度和力矩。伺服系統(tǒng)的發(fā)展經(jīng)歷了從液壓、氣動到電氣的過程,而電氣伺服系統(tǒng)包括驅(qū)動器伺服電機(jī)、反饋裝置
2021-06-28 06:51:52
轉(zhuǎn)載連接: https://blog.csdn.net/gaoweiweiw/article/details/52935722運(yùn)動控制卡運(yùn)動控制卡是一種上位控制單元,可以控制伺服電機(jī),是基于PC總線
2021-06-28 07:54:00
交流伺服電機(jī)的工作原理伺服系統(tǒng)的組成及分類伺服馬達(dá)(交流)的特點(diǎn)伺服控制的選型步驟
2021-02-22 07:55:20
運(yùn)動控制(MC)是自動化的一個分支,它使用通稱為
伺服機(jī)構(gòu)的一些設(shè)備如液壓泵,線性執(zhí)行機(jī)或者是電機(jī)來
控制機(jī)器的位置或速度。
運(yùn)動控制在機(jī)器人和數(shù)控機(jī)床的領(lǐng)域內(nèi)的應(yīng)用要比在專用機(jī)器中的應(yīng)用更復(fù)雜,因?yàn)楹笳?/div>
2016-05-07 19:22:19
本人對運(yùn)動控制卡一無所知,想問一下運(yùn)動控制是不是也像數(shù)據(jù)采集卡一樣有多組通道呢,一塊運(yùn)動控制卡能不能實(shí)現(xiàn)同時控制幾個電機(jī)做相同的運(yùn)動呢?
2013-06-05 00:45:32
運(yùn)動控制卡是什么?運(yùn)動控制卡有何功能?伺服驅(qū)動器是什么?伺服驅(qū)動器有哪幾種控制方式?
2021-10-09 08:17:42
運(yùn)動控制器控制伺服電機(jī)的指令方式運(yùn)動控制器以模擬量信號控制伺服電機(jī)的調(diào)試步驟
2021-01-21 07:15:51
作者:何國軍 陳維榮 劉小強(qiáng) 孫叢君運(yùn)動控制技術(shù)是數(shù)控機(jī)床的關(guān)鍵技術(shù),其技術(shù)水平的高低將直接影響一個國家裝備制造業(yè)的發(fā)展水平。目前,多軸伺服控制器越來越多地運(yùn)用在運(yùn)動控制系統(tǒng)中,具有較高的集成度
2019-07-31 08:15:26
運(yùn)動控制器是運(yùn)動控制系統(tǒng)的核心部件。目前,國內(nèi)的運(yùn)動控制器大致可以分為3類:第1類是以單片機(jī)等微處理器作為控制核心的運(yùn)動控制器。這類運(yùn)動控制器速度較慢、精度不高、成本相對較低,只能在一些低速運(yùn)行和對軌跡要求不高的輪廓運(yùn)動控制場合應(yīng)用。
2019-10-16 06:22:14
運(yùn)動控制系統(tǒng)由什么組成?
2021-11-01 06:33:31
目錄前言運(yùn)動控制系統(tǒng)的基本方程前言本篇文章主要參考資料為:電力拖動自動控制系統(tǒng)——運(yùn)動控制系統(tǒng)(第五版) 阮毅 楊影 陳伯時工業(yè)運(yùn)動控制——電機(jī)選擇,驅(qū)動器和控制器應(yīng)用 Hakan Gurocak
2021-09-15 07:57:19
編程語言。我們公司是通過調(diào)用DLL動態(tài)鏈接庫連調(diào)用運(yùn)動控制卡的驅(qū)動,除了會使用運(yùn)動控制卡之外,還需要學(xué)習(xí)步進(jìn)電機(jī)和伺服電機(jī)的相關(guān)知識。由于這方面涉及公司的知識產(chǎn)權(quán),所以不方便和大家分享,抱歉。關(guān)于視覺
2015-02-10 11:30:19
什么是運(yùn)動控制卡?運(yùn)動控制卡與驅(qū)動器有什么不同?PLC控制好還是運(yùn)動控制卡控制好?
2021-10-09 07:56:29
`不知道有沒有大神玩過,用labview控制雷賽的運(yùn)動控制卡,進(jìn)而控制伺服電機(jī)。前幾天用的好好的,不知道從什么時候開始,labview無法控制了。而這個運(yùn)動控制卡自帶的例程(應(yīng)該是用C語言寫的),還能正常控制。請問問題可能出在什么地方??`
2017-03-02 10:15:36
各位大俠,求助呀~運(yùn)動控制卡采用的是ni公司PCI-7350,用labview編寫運(yùn)動控制系統(tǒng)。以前沒有編寫過大型的系統(tǒng),沒什么經(jīng)驗(yàn),大俠們有沒有相關(guān)的資料,特別是編寫的相關(guān)的例子。單軸,雙軸,三軸的就行了~~~求救呀~~~{:4:}
2013-03-12 16:07:11
USS是什么意思?USS通信與串口通信區(qū)別在什么地方?運(yùn)動控制器PLC的結(jié)構(gòu)是如何構(gòu)成的?什么是伺服驅(qū)動器 ?
2021-06-28 08:03:17
文章目錄第1章 緒論第2章 運(yùn)動曲線2.0 引言2.1 運(yùn)動學(xué)的基本概念2.2 常見運(yùn)動曲線2.2.1 梯形速度曲線2.2.2 S 形速度曲線第3章 傳動鏈設(shè)計第1章 緒論什么是運(yùn)動控制系統(tǒng)?運(yùn)動
2021-09-01 07:06:21
什么是運(yùn)動控制系統(tǒng)?運(yùn)動控制系統(tǒng)的任務(wù)是什么?
2021-10-29 07:40:48
嵌入式技術(shù)在工業(yè)控制領(lǐng)域的應(yīng)用還不太成熟,近年來,工業(yè)控制對運(yùn)動控制系統(tǒng)的要求越來越高,為了滿足新一代運(yùn)動控制系統(tǒng)的各項(xiàng)性能要求,嵌入式運(yùn)動控制器應(yīng)運(yùn)而生。而基于ARM運(yùn)動控制芯片的新一代運(yùn)動
2019-10-11 06:30:55
各位好,請問我想用NI的運(yùn)動控制板卡控制兩臺伺服驅(qū)動器,采用最簡單的脈沖控制方式。NI的板卡選用PCI7390,不知是否合適,如不合適,還請各位指出更合適的控制器,謝謝!
2018-01-11 09:57:37
的潛在優(yōu)勢。除了通過基于PC 的控制軟件支持配置外,新的伺服系統(tǒng)還提供其它關(guān)鍵功能,例如帶直接集成驅(qū)動器的伺服電機(jī)、單電纜連接和板載安全功能。運(yùn)動控制系統(tǒng)設(shè)計中所具有的更大的簡化性和靈活性,降低了伺服
2023-03-03 16:04:20
需要做一個基于labview 加運(yùn)動控制卡的伺服電機(jī)運(yùn)動控制系統(tǒng),請問PCI-7831R 這塊板是運(yùn)動控制卡嗎,可不可以用來做,百度了是什么多功能RIO,新手,不太懂求指教
2015-12-09 18:15:35
請問各位大神,我做實(shí)驗(yàn)使用的是雷塞DMC2210的運(yùn)動控制卡,來控制松下A5系列的伺服電機(jī)。之前做實(shí)驗(yàn)轉(zhuǎn)速一直都是好好的,現(xiàn)在卻經(jīng)常出現(xiàn)轉(zhuǎn)速控制不了的問題:就是無論我面板上輸入多大轉(zhuǎn)速,電機(jī)始終是
2016-05-28 15:14:57
本文設(shè)計了一種基于神經(jīng)網(wǎng)絡(luò)控制算法的伺服運(yùn)動控制卡。
2021-06-03 06:05:09
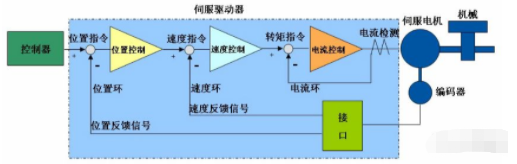
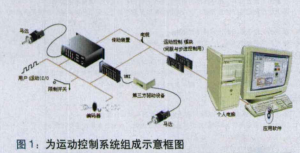
機(jī)器的各種元件如圖1所示。中央數(shù)字控制器(CNC)或可編程邏輯控制器(PLC)管理機(jī)器操作,并且為機(jī)器中每個伺服電機(jī)軸產(chǎn)生運(yùn)動軌跡規(guī)劃。每個伺服驅(qū)動器包括多個控制環(huán)路來管理機(jī)械系統(tǒng)動態(tài)特性、電磁扭矩
2016-01-25 16:48:48
運(yùn)動控制技術(shù)是數(shù)控機(jī)床的關(guān)鍵技術(shù),其技術(shù)水平的高低將直接影響一個國家裝備制造業(yè)的發(fā)展水平。目前,多軸伺服控制器越來越多地運(yùn)用在運(yùn)動控制系統(tǒng)中,具有較高的集成度和靈活性,可實(shí)時完成運(yùn)動控制過程中復(fù)雜
2019-08-06 06:27:00
在多軸伺服控制系統(tǒng)中實(shí)現(xiàn)同步精密運(yùn)動
2021-01-27 07:45:40
基于永磁同步電機(jī)伺服系統(tǒng)的控制算法是什么?如何對一種基于永磁同步電機(jī)伺服系統(tǒng)的控制算法進(jìn)行仿真?
2021-07-13 08:12:47
如何用STM32控制一個三軸伺服系統(tǒng)?
2021-09-26 08:56:25
運(yùn)動控制系統(tǒng)被廣泛地運(yùn)用于各個領(lǐng)域。傳統(tǒng)的運(yùn)動控制系統(tǒng)設(shè)計有基于PC的中央控制方式和基于微控制器的嵌入式控制方式等。
2019-08-28 07:00:52
在現(xiàn)代的工業(yè)控制、車輛運(yùn)動和醫(yī)療設(shè)備等系統(tǒng)中,懸掛運(yùn)動系統(tǒng)的應(yīng)用越來越多,在這些系統(tǒng)中懸掛運(yùn)動部件通常是具體的執(zhí)行機(jī)構(gòu),因而懸掛部件的運(yùn)動精確性是整個系統(tǒng)工作效能的決定因素,而在實(shí)際中實(shí)現(xiàn)懸掛運(yùn)動
2019-08-12 08:21:38
怎樣去搭建一個基于TwinCAT的運(yùn)動控制系統(tǒng)?基于TwinCAT的運(yùn)動控制系統(tǒng)應(yīng)具備哪些功能?
2021-08-24 06:27:47
執(zhí)行部件的運(yùn)動速度與位置。伺服系統(tǒng)是數(shù)控裝置和機(jī)床的聯(lián)系環(huán)節(jié),是數(shù)控系統(tǒng)的重要組成,具有以下特點(diǎn):*必須具備高精度的傳感器,能準(zhǔn)確地給出輸出量的電信號。*功率放大器以及控制系統(tǒng)都必須是可逆的。*足夠
2018-10-12 11:01:08
Labview學(xué)習(xí)運(yùn)動控制卡例程。-使用運(yùn)動控制卡USB_AMC2XE V1.0及單杠絲滑臺進(jìn)行硬件的設(shè)備連接,實(shí)現(xiàn)上位機(jī)與硬件設(shè)備之間的通訊,進(jìn)行運(yùn)動控制效果定長運(yùn)動、回原點(diǎn)運(yùn)動實(shí)驗(yàn)講解,以及進(jìn)行
2021-11-26 10:38:50
求教各位大神,現(xiàn)有一塊7344的運(yùn)動控制卡,UMI-7774的運(yùn)動控制接線盒,想要控制店家,如何在MAX里面進(jìn)行配置?
2016-01-21 22:12:33
伺服系統(tǒng),機(jī)器人可以廣泛地用于掌握變化的外部環(huán)境。從而做出相應(yīng)的反應(yīng)。這就是伺服系統(tǒng)的背景。最典型的一個例子就是圖中實(shí)況轉(zhuǎn)播中乒乓球的高速追蹤。 如果攝像頭需要捕捉某一運(yùn)動物體,常需要...
2021-07-12 06:03:45
試驗(yàn)車運(yùn)動控制系統(tǒng)包含S7200 PLC程控器和兩套伺服控制系統(tǒng)(一套控制車體、一套控制電纜盤)。車體控制系統(tǒng)為速度控制模式,電纜盤控制系統(tǒng)為轉(zhuǎn)矩控制模式。S7200 PLC和兩套伺
2009-06-16 10:53:19 17
17 介紹了一個用于水下運(yùn)動目標(biāo)軌跡測量系統(tǒng)的機(jī)電伺服系統(tǒng)。該系統(tǒng)由兩部分構(gòu)成:機(jī)械裝置與控制單元。該伺服系統(tǒng)使測量系統(tǒng)能夠在水平平面或垂直平面上轉(zhuǎn)動,從而擴(kuò)大測量
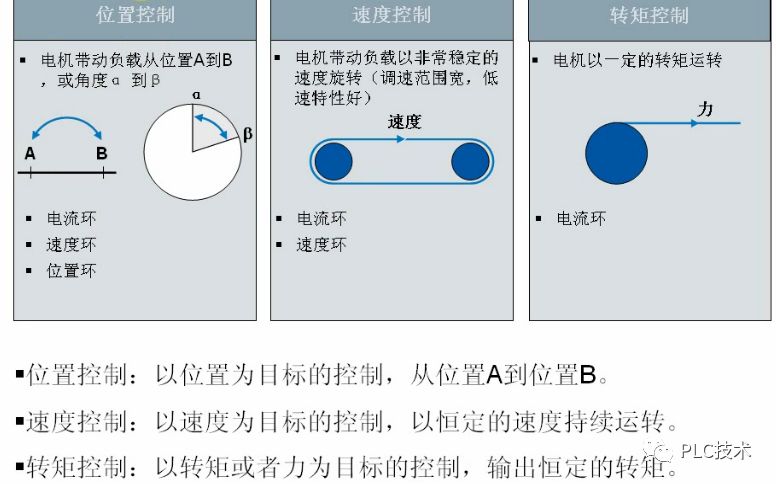
2009-06-22 14:48:1211 伺服系統(tǒng)的扭矩控制(Toque Control)和速度控制(Velocity Control)?一般定位上的伺服系統(tǒng)之伺服馬達(dá)控制方式可分為扭矩控制(Toque Control)及速度控制(Velocity Control)兩類,這兩種控制方式都
2009-07-04 08:30:1253 伺服系統(tǒng)的PID控制
伺服系統(tǒng)的摩擦動態(tài)特性是非常復(fù)雜的,目前已經(jīng)提出了許多摩擦模型。
2010-05-04 16:05:5351 基于DSP的運(yùn)動控制器的開發(fā)
運(yùn)動控制器是一種用于多種運(yùn)動控制場合的上位控制單元,通常采用專業(yè)運(yùn)動控制芯片或高速DSP來控制步進(jìn)電機(jī)或伺服電機(jī)。運(yùn)動控制器
2009-12-25 09:44:071965 
基于Motionchip的直流無刷伺服電機(jī)運(yùn)動控制系統(tǒng)設(shè)計和運(yùn)用
在傳統(tǒng)的電機(jī)伺服控制裝置中,一般采用一個或多個單片機(jī)作為伺服控制的核心處理器。由于這種伺服控制
2010-02-22 11:00:30712 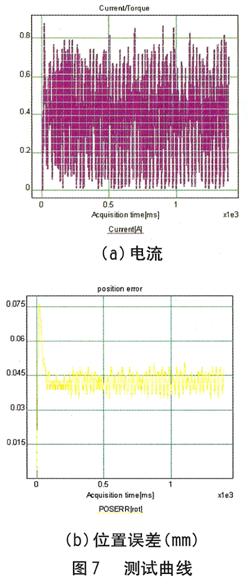
隨著計算機(jī)技術(shù)和現(xiàn)場總線技術(shù)的發(fā)展和成熟,也促使伺服系統(tǒng)的實(shí)現(xiàn)方式和體系結(jié)構(gòu)在不斷地發(fā)展,將現(xiàn)場總線應(yīng)用于運(yùn)動控制,構(gòu)成分布式控制的數(shù)字控制伺服系統(tǒng)日益受到人們的重視。基于現(xiàn)場總線的分布式伺服系統(tǒng)有很多優(yōu)點(diǎn),如連線少、可靠性高、易于系統(tǒng)的維
2011-01-19 10:19:111513 
伺服系統(tǒng)按其驅(qū)動元件劃分,有步進(jìn)式伺服系統(tǒng)、直流電動機(jī)伺服系統(tǒng)、交流電動機(jī)伺服系統(tǒng)。按控制方式劃分,有開環(huán)伺服系統(tǒng)、閉環(huán)伺服系統(tǒng)和半閉環(huán)伺服系統(tǒng)等。
2011-07-10 17:15:042298 
伺服系統(tǒng)脈沖控制電路將產(chǎn)生用來控 制伺服系統(tǒng) 的脈沖。圖示的組件顯示這個伺服系統(tǒng)應(yīng)該產(chǎn)生一個90的總旋轉(zhuǎn)。
2011-11-03 16:33:193474 用液壓元件組成的伺服系統(tǒng)(什么是伺服系統(tǒng))稱為液壓伺服系統(tǒng),并且液壓伺服系統(tǒng)具有易于實(shí)現(xiàn)直線運(yùn)動的速度位移及力控制,驅(qū)動力、力矩和功率大,尺寸小重量輕,加速性能好,響
2012-02-09 10:05:337075 
伺服系統(tǒng)的PID控制技術(shù)下載
伺服系統(tǒng)的PID控制技術(shù)下載
2015-12-09 16:46:538 音圈電機(jī)伺服系統(tǒng)模糊PID控制-2010。
2016-04-06 14:21:4918 交流永磁伺服系統(tǒng)技術(shù)講座第六講_九_交流永磁伺服系統(tǒng)的控制策略
2016-04-26 10:47:089 交流永磁伺服系統(tǒng)技術(shù)講座第六講_七_(dá)交流永磁伺服系統(tǒng)的控制策略
2016-04-26 10:47:0821 交流永磁伺服系統(tǒng)技術(shù)講座第六講_十_交流永磁伺服系統(tǒng)的控制策略
2016-04-26 10:47:0810 交流永磁伺服系統(tǒng)技術(shù)講座第六講_十二_交流永磁伺服系統(tǒng)的控制策略。
2016-04-26 10:47:0818 交流永磁伺服系統(tǒng)技術(shù)講座第六講_十一_交流永磁伺服系統(tǒng)的控制策略
2016-04-26 10:47:0810 模糊控制及其在液壓伺服系統(tǒng)中的應(yīng)用_余兵
2017-02-07 16:59:251 交流伺服運(yùn)動控制系統(tǒng)
2017-04-08 09:06:197 隨著先進(jìn)制造技術(shù)的迅速發(fā)展,對運(yùn)動控制的精度要求也越來越高,而運(yùn)動伺服控制系統(tǒng)的性能很大程度上取決于伺服控制算法,通過運(yùn)動控制與智能控制的融合
2017-09-01 11:32:214 針對用于激光焊接的關(guān)節(jié)型工業(yè)機(jī)器人運(yùn)動誤差控制問題,根據(jù)關(guān)節(jié)型工業(yè)機(jī)器人伺服控制和運(yùn)動學(xué)原理,分析了機(jī)器人運(yùn)動誤差的積累過程,并對運(yùn)動誤差和伺服系統(tǒng)誤差分別進(jìn)行了測量和比較。結(jié)果表明,伺服系統(tǒng)誤差是運(yùn)動誤差的重要組成部分。該結(jié)論對機(jī)器人激光焊接的路徑控制具有一定參考意義。
2017-10-12 18:19:066 本文主要詳解PLC控制伺服系統(tǒng)步驟,首先介紹了PLC工作原理以及PLC控制伺服電機(jī)3種方式,其次闡述了西門子PLC控制的伺服控制系統(tǒng),具體的跟隨小編一起來了解一下。
2018-06-01 10:46:1250851 本文首先介紹了伺服運(yùn)動控制系統(tǒng)主要特點(diǎn),其次介紹了伺服運(yùn)動控制系統(tǒng)工作原理,最后從機(jī)器人移動方式的選擇與結(jié)構(gòu)設(shè)計、移動機(jī)器人運(yùn)動控制系統(tǒng)及機(jī)器人的控制系統(tǒng)設(shè)計三個方面來詳細(xì)介紹機(jī)器人伺服運(yùn)動控制系統(tǒng)設(shè)計,具體的跟隨小編一起來了解一下。
2018-06-01 14:19:3614965 本文主要詳解基于自抗擾控制的雙環(huán)伺服系統(tǒng),分別從ADRC抗干擾機(jī)理、伺服系統(tǒng)自抗擾控制、仿真研究以及實(shí)驗(yàn)結(jié)果四個方面詳細(xì)解析,具體的跟隨小編一起來了解一下。
2018-06-01 14:44:287452 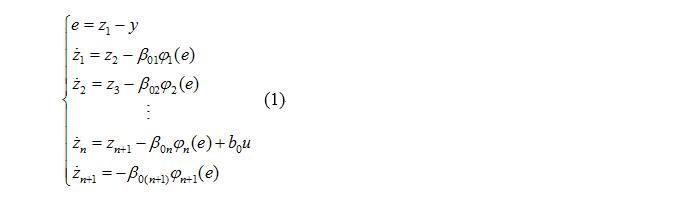
而運(yùn)動控制(包括軌跡控制、伺服控制)與順序控制、過程控制,傳動控制并列為典型的控制模式,是一直以來扮演重要支柱技術(shù)角色的自動控制系統(tǒng),在許多高科技領(lǐng)域得到了非常廣泛的應(yīng)用,如激光加工,機(jī)器人,數(shù)控機(jī)床。大規(guī)模集成電路制造設(shè)備、雷達(dá)和各種軍用武器隨動系統(tǒng),以及柔性制造系統(tǒng)(FMS)等。
2019-10-10 08:05:001935 
這種方式與步進(jìn)電機(jī)的控制方式類似,運(yùn)動控制器給伺服驅(qū)動器發(fā)送“脈沖/方向”或“CW/CCW”類型的脈沖指令信號;伺服驅(qū)動器工作在位置控制模式,位置閉環(huán)由伺服驅(qū)動器完成。日系伺服和國產(chǎn)伺服產(chǎn)品大都采用這種模式。其優(yōu)點(diǎn)是系統(tǒng)調(diào)試簡單,不易產(chǎn)生干擾,但缺點(diǎn)是伺服系統(tǒng)響應(yīng)稍慢。
2019-02-17 11:16:2710987 ;伺服驅(qū)動器工作在位置控制模式,位置閉環(huán)由伺服驅(qū)動器完成。日系伺服和國產(chǎn)伺服產(chǎn)品大都采用這種模式。其優(yōu)點(diǎn)是系統(tǒng)調(diào)試簡單,不易產(chǎn)生干擾,但缺點(diǎn)是伺服系統(tǒng)響應(yīng)稍慢。 2、模擬信號 這種方式下,運(yùn)動控制系統(tǒng)給伺服驅(qū)動器發(fā)送+/-10V的模
2020-06-12 14:45:485452 工業(yè)控制主要分兩個方向,一個是運(yùn)動控制,通常用于機(jī)械領(lǐng)域;另一個就是過程控制,通常使用于化工領(lǐng)域。而運(yùn)動控制指的是一種起源于早期的伺服系統(tǒng),基于電動機(jī)的控制,以實(shí)現(xiàn)物體對角位移、轉(zhuǎn)矩、轉(zhuǎn)速等等物理量改變的控制。
2019-03-03 11:01:337236 這種運(yùn)動控制器大都采用DSP或微機(jī)芯片作為CPU,可完成運(yùn)動規(guī)劃、高速實(shí)時插補(bǔ)、伺服濾波控制和伺服驅(qū)動,外部IO之間的標(biāo)準(zhǔn)化通用接口功能,它開放的函數(shù)庫可提供用戶根據(jù)不同的需要,在DOS或Windows等平臺下開發(fā)應(yīng)用軟件,組成各種控制系統(tǒng)。目前這種運(yùn)動控制器得到了廣泛的應(yīng)用。
2020-04-23 09:13:422355 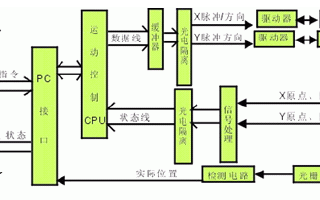
針對交流伺服運(yùn)動控制系統(tǒng),在PMSM 伺服系統(tǒng)電流環(huán)和速度環(huán)的基礎(chǔ)上,進(jìn)行位置環(huán)設(shè)計,保證伺服電機(jī)位置跟蹤的精確性。同時,利用S 曲線加減速算法進(jìn)行速度規(guī)劃,減小電機(jī)在加減速過程中的機(jī)械振動,以保證
2020-07-16 17:32:2155 伺服控制,即為滿足某種目的,對產(chǎn)生的運(yùn)動和對物體的運(yùn)動進(jìn)行控制的人類活動。所謂伺服控制指對物體運(yùn)動的位置、速度及加速度等變化量的有效控制。這種控制已在各領(lǐng)域得到普及。
2020-11-10 17:52:107316 工業(yè)控制主要分兩個方向,一個是運(yùn)動控制,通常用于機(jī)械領(lǐng)域;另一個就是過程控制,通常使用于化工領(lǐng)域。而運(yùn)動控制指的是一種起源于早期的伺服系統(tǒng),基于電動機(jī)的控制,以實(shí)現(xiàn)物體對角位移、轉(zhuǎn)矩、轉(zhuǎn)速等等物理量改變的控制
2020-12-24 23:32:471324 伺服控制系統(tǒng)是一種能對試驗(yàn)裝置的機(jī)械運(yùn)動按預(yù)定要求進(jìn)行自動控制的操作系統(tǒng)。 在很多情況下,伺服系統(tǒng)專指被控制量(系統(tǒng)的輸出量)是機(jī)械位移或位移速度、加速度的反饋控制系統(tǒng),其作用是使輸出的機(jī)械位移(或轉(zhuǎn)角)準(zhǔn)確地跟蹤輸入的位移(或轉(zhuǎn)角)。伺服系統(tǒng)的結(jié)構(gòu)組成和其他形式的反饋控制系統(tǒng)沒有原則上的區(qū)別。
2021-02-20 15:31:315826 近日,協(xié)會會員單位上海新時達(dá)重磅發(fā)布了兩款運(yùn)動控制新品:Ω6系列交流伺服系統(tǒng)、SC系列運(yùn)動控制器。 新時達(dá)運(yùn)控事業(yè)部對這兩款產(chǎn)品寄予厚望,事業(yè)部總經(jīng)理王剛志先生表示,Ω6系列交流伺服系統(tǒng)、SC系列
2021-04-26 15:43:462674 伺服系統(tǒng)是自動化生產(chǎn)里面的執(zhí)行機(jī)構(gòu),各類機(jī)械手想要做功,離不開伺服系統(tǒng)的幫助。伺服系統(tǒng)相比以往的其他電機(jī),最大的優(yōu)點(diǎn)就是控制的精度高,因?yàn)槠鋼碛芯幋a器結(jié)構(gòu),可以實(shí)現(xiàn)閉環(huán)控制。作為伺服系統(tǒng)的主體,運(yùn)動
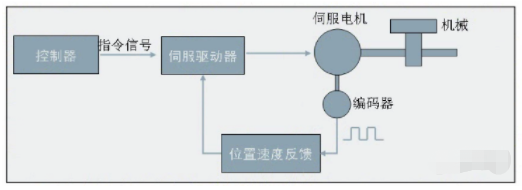
2022-06-02 14:32:292869 伺服系統(tǒng)一般由驅(qū)動器、編碼器以及運(yùn)動電機(jī)共同組成,是能夠?qū)崿F(xiàn)高精度控制的工業(yè)執(zhí)行機(jī)構(gòu)。
2022-07-27 17:40:262921 交流伺服系統(tǒng)通常由以下幾個主要組成部分構(gòu)成:
交流伺服電機(jī):交流伺服電機(jī)是伺服系統(tǒng)的核心部件之一,它的轉(zhuǎn)速、力矩和位置等運(yùn)動狀態(tài)能夠受到精密控制。常用的交流伺服電機(jī)有感應(yīng)電機(jī)和永磁同步電機(jī)等。
2023-03-07 14:15:362660 機(jī)電伺服系統(tǒng)廣泛應(yīng)用于各種機(jī)械設(shè)備中,其種類和形式多種多樣。以下列舉一些常見的機(jī)電伺服系統(tǒng):
伺服電機(jī)系統(tǒng):伺服電機(jī)系統(tǒng)是一種利用電機(jī)控制機(jī)械運(yùn)動的伺服系統(tǒng),它通常包括電機(jī)、編碼器、控制
2023-03-07 14:31:081421 控制系統(tǒng)的硬件主要由上位計算機(jī)、運(yùn)動控制器、功率驅(qū)動裝置、電動機(jī)和 反饋檢測裝置和被控對象等幾部分組成,如圖1所示。電動機(jī)及其功率驅(qū)動裝置作為執(zhí)行器主要為被控對象提供動力,特別設(shè)計應(yīng)用于伺服系統(tǒng)的電機(jī)稱之為伺服
2023-04-21 18:04:19693 一個多軸運(yùn)動控制系統(tǒng)由高階的運(yùn)動控制器(motioncontroller)與低階的伺服驅(qū)動器(servodriver)所組成,運(yùn)動控制器負(fù)責(zé)運(yùn)動控制命令譯碼、各個位置控制軸彼此間的相對運(yùn)動、加減
2023-05-09 10:56:39973 
置控制模式,位置閉環(huán)由伺服驅(qū)動器完成。日系伺服和國產(chǎn)伺服產(chǎn)品大都采用這種模式。其優(yōu)點(diǎn)是系統(tǒng)調(diào)試簡單,不易產(chǎn)生干擾,但缺點(diǎn)是伺服系統(tǒng)響應(yīng)稍慢。
2023-05-09 14:43:031011 在自動化領(lǐng)域,運(yùn)動控制器和基本的伺服驅(qū)動器之間存在著微妙的差異。許多應(yīng)用都需要運(yùn)動控制器和伺服驅(qū)動器共同組成一個完整的系統(tǒng),因此,掌握每個設(shè)備的功能和智能水平至關(guān)重要。 ? 伺服系統(tǒng) 伺服驅(qū)動器
2023-07-10 10:02:25985 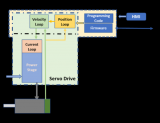
伺服系統(tǒng)主要由伺服控制器、驅(qū)動電路、伺服電動機(jī)及相應(yīng)反饋檢測器件組成。1.伺服系統(tǒng)原理當(dāng)人為的給定控制信號并被伺服控制系統(tǒng)接收時,執(zhí)行機(jī)構(gòu)就會按照控制信號的指令進(jìn)行一系列的運(yùn)動和動作;如果不再
2023-08-27 08:08:421729 
全國產(chǎn)EtherCAT運(yùn)動控制邊緣控制器的軸參數(shù)設(shè)置與單軸運(yùn)動例程講解。
2023-09-27 15:42:26353 
運(yùn)動控制系統(tǒng)其實(shí)運(yùn)動控制系統(tǒng)是一個比較大的系統(tǒng),就像前面的通信系統(tǒng)一樣,通常會由眾多的組成部分構(gòu)成。運(yùn)動控制系統(tǒng)會綜合信號分析與處理、自動控制、通信等的內(nèi)容。運(yùn)動的要素抽象來講,運(yùn)動的要素可概況
2023-10-25 08:07:52819  電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論