1、特征工程與意義 特征就是從數(shù)據(jù)中抽取出來的對(duì)結(jié)果預(yù)測(cè)有用的信息。 特征工程是使用專業(yè)知識(shí)背景知識(shí)和技巧處理數(shù)據(jù),是得特征能在機(jī)器學(xué)習(xí)算法上發(fā)揮更好的作用的過程。 2、基本數(shù)據(jù)處理 數(shù)據(jù)采集 需要
2020-10-08 15:24:00 2620
2620 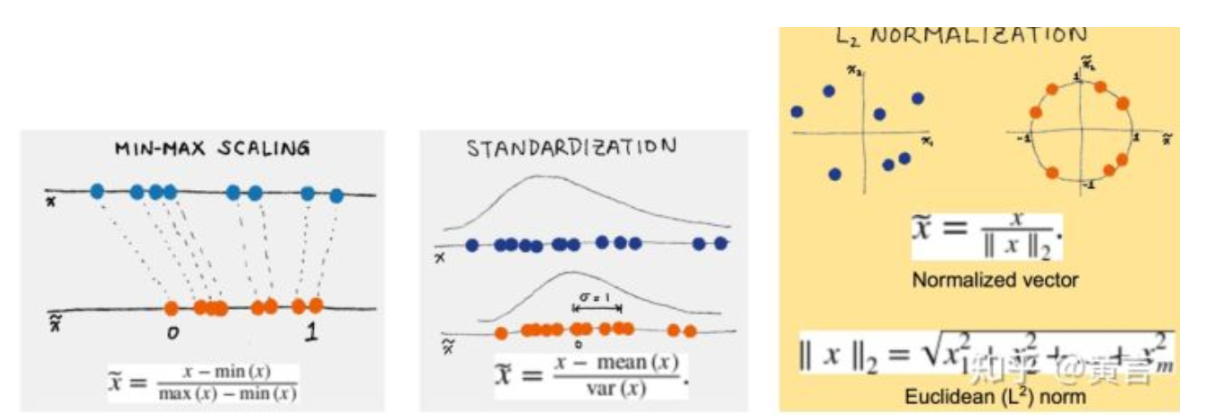
SIFT特征是基于物體上的一些局部外觀的興趣點(diǎn)而與影像的大小和旋轉(zhuǎn)無關(guān)。對(duì)于光線、噪聲、微視角改變的容忍度也相當(dāng)高。SURF也是一種類似于SIFT的興趣點(diǎn)檢測(cè)及描述子算法。其通過Hessian矩陣的行列式來確定興趣點(diǎn)位置,再根據(jù)興趣點(diǎn)鄰域點(diǎn)的Haar小波響應(yīng)來確定描述子
2017-12-15 07:56:0030248 
在前不久發(fā)布的OpenCV4.5中更新了很多新特性: 從4.5版本開始,OpenCV將正式使用Apache2協(xié)議,從而避免專利算法帶來的潛在糾紛 SIFT專利到期,代碼被移到主庫(kù) 對(duì)RANSAC算法
2021-09-22 14:16:374766 
將介紹OpenCV中自帶組件HighGUI的簡(jiǎn)單使用。當(dāng)我們?cè)跍y(cè)試算法,查看算法效果的時(shí)候,需要用到可視化,動(dòng)態(tài)調(diào)參的界面,也可能需要監(jiān)聽鼠標(biāo),鍵盤等的動(dòng)作,這時(shí),HighGUI就發(fā)揮大作用了,HighGUI作為OpenCV的圖形化(GUI)組件,可以通過HighGUI開發(fā)一些簡(jiǎn)易的上位機(jī)。
2020-11-05 06:54:52
OpenCV 是一個(gè)廣受歡迎的開源計(jì)算機(jī)視覺庫(kù),它提供了很多函數(shù),實(shí)現(xiàn)了很多計(jì)算機(jī)視覺算法,算法從最基本的濾波到高級(jí)的物體檢測(cè)皆有涵蓋。很多初學(xué)者希望快速掌握 OpenCV 的使用方法,但往往會(huì)
2018-10-24 15:23:52
openCV的庫(kù)自帶了模板匹配算法嗎
2023-10-10 06:48:04
一個(gè)算法應(yīng)該具有以下五個(gè)重要的特征:1,有窮性(Finiteness):算法的有窮性是指算法必須能在執(zhí)行有限個(gè)步驟之后終止;2,確切性(Definiteness):算法的每一步驟必須有確切的定義;3
2019-07-09 16:21:55
算法篇(PID詳解)
2020-05-19 10:30:59
??各位同學(xué)你們好呀,上期我們講了中性點(diǎn)鉗位型的三電平逆變器原理,相信大家都有印象了。那么這一期我們要詳解三電平傳統(tǒng)SVPWM調(diào)制算法原理。通過學(xué)習(xí)后,希望能給初學(xué)者提供捷徑明白算法原理,將來做仿真
2021-08-27 07:25:20
本帖最后由 richthoffen 于 2019-7-19 16:41 編輯
詳解快速傅里葉變換FFT算法
2019-07-18 08:07:33
詳解快速傅里葉變換FFT算法
2020-03-28 11:48:16
詳解快速傅里葉變換FFT算法
2020-05-25 09:31:30
詳解快速傅里葉變換FFT算法
2021-03-05 11:07:32
1.引言OpenCV(Open Source Computer Vision Library)是一個(gè)開源的計(jì)算機(jī)視覺庫(kù),它提供了很多函數(shù),這些函數(shù)非常高效地實(shí)現(xiàn)了計(jì)算機(jī)視覺算法。OpenCV
2021-11-03 07:01:48
Python下使用SIFT算法描繪兩張圖片的相似特征點(diǎn)
2020-06-02 13:16:57
SVPWM的原理推導(dǎo)和控制算法詳解,不錯(cuò)的資料,值得一看
2016-01-28 15:09:44
進(jìn)行實(shí)時(shí)采集,隨后opencv對(duì)圖像進(jìn)行特征采樣,并與學(xué)習(xí)樣本對(duì)比,進(jìn)行人臉匹配。該系統(tǒng)內(nèi)還搭載一個(gè)嵌入式服務(wù)器,通過以太網(wǎng)接入局域網(wǎng)絡(luò),可以使用客戶端與系統(tǒng)建立聯(lián)系,實(shí)現(xiàn)配置與反饋結(jié)果。學(xué)習(xí)計(jì)劃:1
2015-12-18 14:34:30
設(shè)計(jì)驗(yàn)證實(shí)時(shí)圖像拼接算法。項(xiàng)目計(jì)劃①根據(jù)文檔, 快速熟悉米爾MYD-C7Z020開發(fā)板②將SIFT,RANSAC,圖像融合等算法做PS,PL的分配③用HLS移植SIFT算法,評(píng)估HLS-SIFT的資源
2019-10-30 17:03:31
目標(biāo)跟蹤算法作為一種有著非常廣泛的應(yīng)用的算法,在航空航天、智能交通、智能設(shè)備等領(lǐng)域有著非常廣泛的應(yīng)用。本系列博客將教大家在410c開發(fā)板上基于linux操作系統(tǒng)環(huán)境,采用QT+Opencv來實(shí)現(xiàn)
2018-09-21 10:42:31
嗨,大家好,我是新手SDK用戶。我使用vivado hls來合成一個(gè)簡(jiǎn)單的圖像處理算法,并構(gòu)建了我現(xiàn)在使用sdk的硬件平臺(tái),我想使用sdk在獨(dú)立模式下使用opencv應(yīng)用程序在zynq fpga上
2020-05-04 17:09:19
.結(jié)果表明:與傳統(tǒng)的Hough變換和離散Radon變換相比,新方法提高了目標(biāo)直線特征的檢測(cè)速度;在有800個(gè)樣本的數(shù)據(jù)庫(kù)上進(jìn)行實(shí)驗(yàn),獲得了96.5%的識(shí)別率,表明了算法的有效性【關(guān)鍵詞】:有限
2010-04-24 09:58:17
我照著xapp1167文檔,用HLS實(shí)現(xiàn)fast_corners的opencv算法,并生成IP。然后想把這個(gè)算法塞到第三季的CH05_AXI_DMA_OV5640_HDMI上,這個(gè)demo里
2017-01-16 09:22:25
本科生畢業(yè)設(shè)計(jì)的程序,專業(yè)通信工程,用sift提取醫(yī)學(xué)圖像特征,要標(biāo)出多少特征點(diǎn),去除錯(cuò)誤的特征點(diǎn),最后做一個(gè)匹配,求大神幫忙!!!扣扣微信773897042!謝謝!!!
2018-05-22 11:02:00
OpenCV-4.3.0是較新的OpenCV版本,最新的版本是OpenCV-4.4.0,由于GitHub太慢總是下載失敗,不得已就移植OpenCV-4.3.0這個(gè)版本用著先。在OpenCV中,新技術(shù)
2021-11-04 08:51:43
啟發(fā)式搜索算法 九、圖像特征提取與匹配之SIFT算法 九(續(xù))、sift算法的編譯與實(shí)現(xiàn) 九(再續(xù))、教你一步一步用c語(yǔ)言實(shí)現(xiàn)sift算法、上九(再續(xù))、教你一步一步用c語(yǔ)言實(shí)現(xiàn)sift算法、下
2018-10-23 14:31:12
基于內(nèi)容的商標(biāo)檢索利用全局形狀特征和子圖像的空間位置關(guān)系進(jìn)行特征匹配,存在檢索精度不高、抗噪聲能力不強(qiáng)和相似子圖像可能發(fā)生誤檢、漏檢等不足。該文提出一種利用Sift
2009-04-10 09:11:17 14
14 基于尺度不變特征變換(SIFT)實(shí)現(xiàn)一種抗幾何攻擊數(shù)字水印。對(duì)SIFT進(jìn)行圖像特征點(diǎn)的檢測(cè),選擇合適的特征點(diǎn)生成載體圖像中的圓形區(qū)域,將圓形區(qū)域劃分為扇形區(qū)域,然后采用空域
2009-04-14 09:54:5126 在現(xiàn)有基于已知特征項(xiàng)特征提取算法的基礎(chǔ)上,提出一種基于已知特征項(xiàng)和環(huán)境相關(guān)量的特征提取算法。該算法通過已知特征項(xiàng)搜索頻繁項(xiàng)集,提高了特征提取速度。環(huán)境相關(guān)量的
2009-04-18 09:37:0117 提出一種基于SIFT的三視圖像特征匹配算法。采用SIFT算法對(duì)三視圖像進(jìn)行特征匹配,引入計(jì)算機(jī)視覺中的三線性關(guān)系和基于三焦張量的像素轉(zhuǎn)移誤差計(jì)算方法,對(duì)SIFT算法的匹配結(jié)果
2009-04-18 09:49:4824 該文把局部三值模式(Local Ternary Patterns, LTP)紋理特征引入Mean Shift 跟蹤算法,提出了基于多特征的Mean Shift 人臉跟蹤算法以解決Mean shift 跟蹤算法的魯棒性問題。通過對(duì)LTP 紋理特征的
2009-11-11 15:54:3212 為了克服傳統(tǒng)的局部特征匹配算法對(duì)噪聲和圖像灰度非線性變換敏感的不足,提出了基于SIFT(Scale Invariant Feature Transform)描述算子的特征匹配算法。該算法首先采用類似Harris
2009-12-07 11:03:3029 路由算法詳解1. 引言 2. 路由器基礎(chǔ)知識(shí) 3. LS算法 4. 示例:Dijkstra算法 5. DV算法 6. 分級(jí)路由
2009-08-06 09:36:095286 
SIFT算法具有旋轉(zhuǎn)、平移、尺度縮放和亮度的變化保持不變性的優(yōu)點(diǎn),也有算法復(fù)雜、計(jì)算時(shí)間長(zhǎng)的缺點(diǎn)。本文提出了以街區(qū)距離代替歐式距離的新方法,來提高SIFT特征匹配效率,縮短
2012-08-13 16:07:4537 為了提高基于SIFT(Scale Invariant Feature Transform)圖像匹配算法對(duì)于圖像對(duì)比度變化的魯棒性和算法效率,提出了一種具有可變系數(shù)的自適應(yīng)對(duì)比度閾值SIFT算法。根據(jù)特征點(diǎn)局部鄰域的灰
2012-10-26 15:11:520 針對(duì)人臉識(shí)別中的特征提取問題,提出一種新的基于Gabor的特征提取算法,利用Gabor小波變換良好的提取區(qū)分能力和LDA所具有的判別性優(yōu)勢(shì)來進(jìn)行特征提取。首先利用Gabor小波變換來提取人臉特征
2013-01-22 14:25:2654 針對(duì)目前基于SIFT的圖像拼接算法復(fù)雜度較高和特征點(diǎn)匹配不準(zhǔn)等問題,提出了一種基于改進(jìn)SIFT的圖像拼接算法。算法利用改進(jìn)的SIFT進(jìn)行特征提取,降低了算法的復(fù)雜度,同時(shí)采用模擬
2013-02-21 16:04:150 針對(duì)SIFT算法復(fù)雜程度高,實(shí)時(shí)性差,在維數(shù)較高的圖像配準(zhǔn)中并不實(shí)用的問題,提出了一種基于線性鑒別分析(LDA)的SIFT算法(SIFT-LDA)。首先利用SIFT算法提取出圖像的特征點(diǎn)向量,
2013-07-24 16:30:3822 對(duì)于圖像監(jiān)控而言,多數(shù)監(jiān)控只是簡(jiǎn)單的捕捉圖像、處理圖像,最后再通過人工進(jìn)行識(shí)別,缺少智能監(jiān)控,特別是針對(duì)某一特定需求的特征識(shí)別。本文設(shè)計(jì)一種基于OpenCV的圖像智能識(shí)別系統(tǒng),利用攝像頭采集圖像
2015-12-31 09:20:2520 圖像處理中用到的算法,sift經(jīng)典代碼。
2016-03-10 14:06:563 SVPWM的原理及法則推導(dǎo)和控制算法詳解
2016-04-13 15:42:3515 空間矢量控制原理及法則推導(dǎo)和控制算法詳解
2016-05-09 10:59:260 《OpenCV3編程入門》書本配套源代碼:漫水填充算法綜合示例
2016-06-06 15:39:442 opencv備忘單,opencv_cheatsheet,opencv_tutorials,opencv_user,opencv2refman2
2016-08-25 15:52:390 OpenCV3編程入門-源碼例程全集-分水嶺算法,感興趣的小伙伴們可以瞧一瞧。
2016-09-18 16:55:030 PID算法詳解
2016-12-17 20:48:1812 基于改進(jìn)SIFT特征點(diǎn)匹配的圖像拼接算法研究_張勇
2017-01-03 17:41:321 基于SIFT和PCA的圖像感知哈希方法_孫銳
2017-01-07 16:00:430 在前一個(gè)博客中已經(jīng)對(duì)機(jī)器視覺及粒子濾波算法的相關(guān)原理進(jìn)行了介紹,在基于410c平臺(tái)實(shí)現(xiàn)粒子濾波算法的前期,我們?cè)谏衔粰C(jī)上應(yīng)用QT和Opencv完成了粒子濾波算法的實(shí)現(xiàn)和測(cè)試,具體的實(shí)現(xiàn)及測(cè)試過程如下:
2017-02-21 09:53:473587 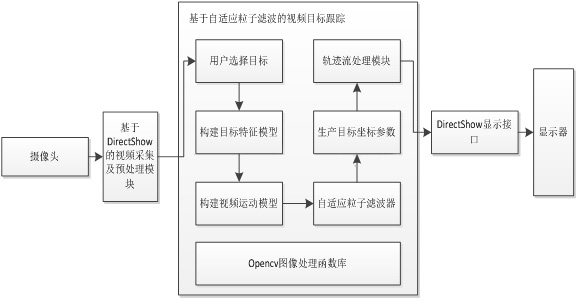
基于幾何特征與新Haar特征的人臉檢測(cè)算法_糜元根
2017-03-19 19:25:562 針對(duì)被局部遮擋目標(biāo)的識(shí)別困難的問題,將目標(biāo)圖像的SIFT( Scale Invariant Feature Transform)特征矢量作為視覺單詞,應(yīng)用視覺詞匯算法,提出了基于SIFT特征視覺詞匯算法
2017-11-14 11:04:145 SIFT特征點(diǎn)提取過程,提出了一種多尺度角點(diǎn)提取方法,提取的多尺度角點(diǎn)對(duì)圖像旋轉(zhuǎn)和尺度變化有很好的適用性。并用SIFT描述子描述,用光學(xué)及SAR圖像進(jìn)行了配準(zhǔn)實(shí)驗(yàn)。結(jié)果表明,與SIFT、Harris算法相比,本文方法在保證配準(zhǔn)精度的基礎(chǔ)上,配準(zhǔn)時(shí)間減
2017-11-17 15:26:4515 針對(duì)唇部特征提取維度過高以及對(duì)尺度空間敏感的問題,提出了一種基于尺度不變特征變換( SIFT)算法作特征提取來進(jìn)行說話人身份認(rèn)證的技術(shù)。首先,提出了一種簡(jiǎn)單的視頻幀圖片規(guī)整算法,將不同長(zhǎng)度的唇動(dòng)視頻
2017-11-28 10:50:340 針對(duì)視頻水印容易遭受幾何攻擊以及水印的魯棒性與透明性的平衡問題,提出一種基于人眼視覺特性與尺度不變特征變換( SIFT)相結(jié)合的抗幾何攻擊視頻雙水印算法。首先獲取視頻序列中人眼視覺掩蔽閾值作為水印
2017-11-30 16:34:040 的SIFT特征提取算法。首先提取出SIFT特征點(diǎn),然后根據(jù)特征點(diǎn)周邊梯度情況,判斷特征點(diǎn)是否落于目標(biāo)區(qū)域,進(jìn)而保留目標(biāo)區(qū)域特征點(diǎn),刪除背景區(qū)域特征點(diǎn),減少特征點(diǎn)數(shù)量的同時(shí)也實(shí)現(xiàn)了去冗余。提取所得的特征點(diǎn)質(zhì)量好壞由落入目標(biāo)區(qū)域的點(diǎn)數(shù)和
2017-12-01 15:08:380 針對(duì)SIFT算法在生成特征向量和進(jìn)行特征匹配過程中存在的計(jì)算量較大、容易產(chǎn)生誤匹配等不足,提出一種優(yōu)化的SIFT配準(zhǔn)算法。優(yōu)化算法首先引入拉普拉斯算子對(duì)圖像邊緣進(jìn)行銳化處理,結(jié)合圖像單元信息投影
2017-12-05 13:46:020 以基于圖像序列攝像機(jī)自標(biāo)定為基礎(chǔ),針對(duì)尺度不變特征轉(zhuǎn)換SIFT算法誤匹配率高且運(yùn)行效率低的問題,提出一種改進(jìn)的雙向SIFT特征匹配算法。在去除誤匹配方面,首先采用雙向匹配消除部分誤匹配點(diǎn)對(duì),然后結(jié)合
2017-12-06 15:00:471 的快速火焰識(shí)別方法,將顏色空間信息引入尺度不變特征變換( SIFT)算法。首先,將視頻文件轉(zhuǎn)化成幀圖像,利用SIFT算法對(duì)所有圖像提取特征描述符;其次,通過火焰在顏色空間上的信息特性進(jìn)一步過濾局部噪聲特征點(diǎn),并借助關(guān)鍵
2017-12-11 14:53:190 針對(duì)定向二進(jìn)制簡(jiǎn)單描述符( ORB)算法不具備尺度不變性的問題,提出一種結(jié)合快速魯棒性特征( SURF)算法和ORB的改進(jìn)算法。首先,利用Hessian矩陣檢測(cè)特征點(diǎn)的方法,使得提取出的特征點(diǎn)具有
2017-12-15 17:15:1121 性;采用FAST特征點(diǎn)表示影像地標(biāo),利用高斯金字塔結(jié)構(gòu)以及仿射增強(qiáng)策略改進(jìn)FAST特征點(diǎn)的尺度和仿射不變性,提升影像地標(biāo)匹配率。將實(shí)驗(yàn)結(jié)果與尺度不變特征變換( SIFT)算法和加速魯棒性(SURF)算法進(jìn)行比較。實(shí)驗(yàn)結(jié)果表明在尺度變
2017-12-19 14:50:410 利用SIFT算法進(jìn)行匹配,得到初始匹配對(duì);然后根據(jù)典型相關(guān)成分的線性關(guān)系擬合直線,利用點(diǎn)到直線的距離剔除大部分誤匹配點(diǎn)對(duì);對(duì)剩余的匹配點(diǎn)對(duì),逐一分析其對(duì)典型相關(guān)成分的共線性的影響,剔除影響程度大的特征點(diǎn)對(duì)。實(shí)驗(yàn)結(jié)果表明,該方法能
2017-12-29 14:44:210 捕獲問題,并對(duì)其特征參數(shù)提取算法進(jìn)行了研究。針對(duì)跳頻信號(hào)的特征提取,研究了一種基于小波脊線的特征提取算法,通過matlab仿真實(shí)驗(yàn)對(duì)方法的性能進(jìn)行了驗(yàn)證,實(shí)驗(yàn)表明基于小波脊線的特征提取算法有很大的性能優(yōu)勢(shì),進(jìn)一步提
2018-01-04 14:04:490 攝像機(jī)運(yùn)動(dòng)情況下的運(yùn)動(dòng)目標(biāo)檢測(cè)及跟蹤是視頻監(jiān)控中的熱點(diǎn)問題。論文提出一種基于SIFT( Sc ale Invariant Feature Transform)特征匹配的運(yùn)動(dòng)目標(biāo)檢測(cè)和跟蹤算法。在目標(biāo)
2018-01-09 16:17:461 白平衡就是圖片中最亮的部分為白色,最暗的部分為黑色,其余部分進(jìn)行拉伸。下文將詳細(xì)介紹OpenCV實(shí)現(xiàn)的灰度世界算法。
2018-01-17 09:05:147367 OpenCV白平衡算法之灰度世界法(消除RGB受光照影響) 在用OpenCV對(duì)圖像進(jìn)行處理時(shí),利用顏色定位是常常會(huì)接觸到的方法,但RGB受光照影響比較嚴(yán)重,轉(zhuǎn)換到HSV XYZ等空間也解決不了
2018-01-17 09:34:326505 針對(duì)尺度不變特征變換( SIFT)算法中描述子維度高造成配準(zhǔn)過程中計(jì)算量過大的問題,提出了一種改進(jìn)的SIFT算法。該算法利用圓形的旋轉(zhuǎn)不變性,以特征點(diǎn)為中心,在近似大小的圓形特征點(diǎn)鄰城內(nèi)構(gòu)造特征
2018-01-30 14:01:582 尺度不變特征轉(zhuǎn)換(Scale-invariant feature transform或SIFT)是一種電腦視覺的算法用來偵測(cè)與描述影像中的局部性特征,它在空間尺度中尋找極值點(diǎn),并提取出其位置、尺度、旋轉(zhuǎn)不變量,此算法由 David Lowe在1999年所發(fā)表,2004年完善總結(jié)。
2018-02-26 10:37:558459 
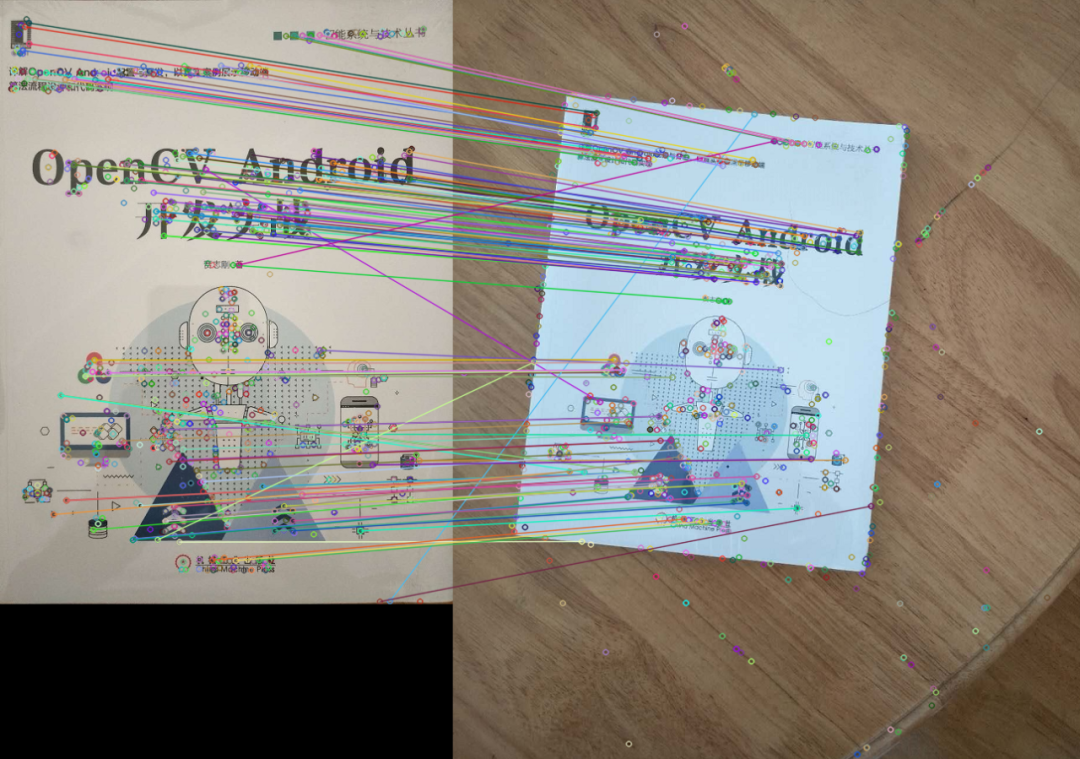
Sift算法是David Lowe于1999年提出的局部特征描述子,并于2004年進(jìn)行了更深入的發(fā)展和完善。Sift特征匹配算法可以處理兩幅圖像之間發(fā)生平移、旋轉(zhuǎn)、仿射變換情況下的匹配問題,具有很強(qiáng)的匹配能力。
2018-02-26 11:06:4967349 基于數(shù)字特征的識(shí)別算法其核心是通過對(duì)數(shù)字的形狀以及結(jié)構(gòu)等幾何特征進(jìn)行分析與統(tǒng)計(jì),通過對(duì)數(shù)字特征的識(shí)別從而達(dá)到對(duì)圖像中數(shù)字的識(shí)別。
2018-04-13 16:39:0010803 
SIFT圖像處理代碼,必須和三個(gè)文件一起下載使用:基于SIFT特征的圖像配準(zhǔn)(Matlab源代碼)、基于SIFT特征的圖像配準(zhǔn)(仿真圖片)。
2018-08-06 08:00:003 SIFT圖像處理代碼,必須和三個(gè)文件一起下載使用:基于SIFT特征的圖像配準(zhǔn)(Matlab源代碼)、基于SIFT特征的圖像配準(zhǔn)(圖像匹配)。
2018-08-06 08:00:003 SIFT,即尺度不變特征變換(Scale-invariant feature transform,SIFT),是用于圖像處理領(lǐng)域的一種描述。這種描述具有尺度不變性,可在圖像中檢測(cè)出關(guān)鍵點(diǎn),是一種局部特征描述子。
2018-08-06 08:00:007 對(duì)于3.3以上的版本,每個(gè)追蹤器可以用各自的函數(shù)創(chuàng)造,如cv2. TrackerKCF_create。詞典OPENCV_OBJECT_TRACKERS包含了7種OpenCV的目標(biāo)追蹤器(30—38行)。它將目標(biāo)追蹤器的命令行參數(shù)字符串映射到實(shí)際的OpenCV追蹤器函數(shù)上。
2018-08-05 09:03:4531530 基于OpenCV3.0,對(duì)BM、SGBM和GC算法進(jìn)行了對(duì)比測(cè)試研究。由于SGBM算法視差效果好速度快的特點(diǎn),常常被廣泛應(yīng)用和改進(jìn),本文針對(duì)SGBM算法主要參數(shù)設(shè)置作了對(duì)比測(cè)試,以供大家參考。
2019-06-12 15:10:0420375 AdabtxⅪt是一個(gè)構(gòu)建精確分類器的學(xué)習(xí)算法,在目標(biāo)檢測(cè)領(lǐng)域有著廣泛的應(yīng)用。OpenCV是Intel開源計(jì)算機(jī)視覺庫(kù)。該文給出了在OpenCV上利用Adaboost算法,實(shí)現(xiàn)車輛車牌檢測(cè)的完整實(shí)驗(yàn)過程,包括樣本的建立、訓(xùn)練級(jí)聯(lián)分類器、以及利用訓(xùn)好的分類器進(jìn)行目標(biāo)檢測(cè)。
2019-09-27 17:49:297 本文檔的主要內(nèi)容詳細(xì)介紹的是OpenCV3.1的使用教程之圖像特征描述的詳細(xì)資料說明
2020-01-06 08:00:0013 因此,OpenCV的目的是開發(fā)一個(gè)普遍可用的計(jì)算機(jī)視覺庫(kù)。在Intel的性能庫(kù)團(tuán)隊(duì)的幫助下,OpenCV實(shí)現(xiàn)了一些核心代碼以及算法,并發(fā)給Intel俄羅斯的庫(kù)團(tuán)隊(duì)。
2020-08-28 10:53:147171 OpenCV 4.x中提供了強(qiáng)大的統(tǒng)一向量指令(universal intrinsics),使用這些指令可以方便地為算法提速。所有的計(jì)算密集型任務(wù)皆可使用這...
2020-12-10 19:40:00569 新增文本檢測(cè)和識(shí)別高級(jí)API 4. SIFT算法優(yōu)化,主要是16位整型高斯濾波指令加速 DNN模塊的改進(jìn): 1. 改進(jìn)層/激活函數(shù)支持更多模型:1D卷積,1D池化 2. 修復(fù)Resize, R
2020-12-31 09:47:332464 本文檔的主要內(nèi)容詳細(xì)介紹的是OpenCV3.1的使用教程之圖像特征描述的詳細(xì)資料說明。
2021-03-29 14:26:3010 OpenCV是一個(gè)跨平臺(tái)計(jì)算機(jī)視覺和機(jī)器學(xué)習(xí)算法庫(kù)。它不僅能用來實(shí)現(xiàn)各種復(fù)雜的算法,還能夠?qū)D像進(jìn)行預(yù)處理:包括圖像的平移、旋轉(zhuǎn)、縮放、翻轉(zhuǎn)、裁剪。希望把這些知識(shí)分享給初學(xué)者。
2021-04-14 14:46:352402 過程,然后根據(jù)改進(jìn)的角點(diǎn)提取算法對(duì)圖像的角點(diǎn)進(jìn)行檢測(cè),利用尺度不變特征變換( scale- invariant feature transform,SIFT)算法對(duì)海浪圖像特征點(diǎn)進(jìn)行立體匹配得出視差圖,最后根據(jù)三角測(cè)量原理獲取圖像的深度信息,實(shí)現(xiàn)海浪波面的三維信息重建
2021-05-06 17:03:5618 針對(duì)SIFT特征提取算法過程復(fù)雜且實(shí)時(shí)性低的缺陷,提出了一種基于GPU的實(shí)時(shí)尺度不變特征變換( Scale-invariant feature transform,SIFT)的優(yōu)化算法— CUDA
2021-05-13 11:31:4811 基于Harris-SIFT的縫料視覺定位系統(tǒng)綜述
2021-06-22 16:05:0615 基于改進(jìn)SIFT和RANSAC圖像拼接算法研究_馬強(qiáng)(怎樣測(cè)監(jiān)控電源電流)-基于改進(jìn)SIFT和RANSAC圖像拼接算法研究_馬強(qiáng)這是一份非常不錯(cuò)的資料,歡迎下載,希望對(duì)您有幫助!
2021-07-26 12:53:1512 BorlandCBuilder6.0安裝OPENCV方法(新型電源技術(shù)結(jié)課論文UC3842)-文檔為BorlandCBuilder6.0安裝OPENCV方法詳解文檔,是一份不錯(cuò)的參考資料,感興趣的可以下載看看,,,,,,,,,,,,,
2021-09-17 15:34:369 首先說一下模板匹配,它是OpenCV自帶的一個(gè)算法,可以根據(jù)一個(gè)模板圖到目標(biāo)圖上去尋找對(duì)應(yīng)位置,如果模板找的比較好那么效果顯著,這里說一下尋找模板的技巧,模板一定要標(biāo)準(zhǔn)、精準(zhǔn)且特征明顯。
2022-04-13 14:20:37954 在過去的十多年時(shí)間里,傳統(tǒng)的機(jī)器視覺領(lǐng)域,通常采用特征描述子來應(yīng)對(duì)目標(biāo)識(shí)別任務(wù),這些特征描述子最常見的就是 SIFT 和 HOG.而 OpenCV 有現(xiàn)成的 API 可供大家實(shí)現(xiàn)相關(guān)的操作。
2022-04-25 15:15:076130 HOG(Histogram of Oriented Gradient)特征在對(duì)象檢測(cè)與模式匹配中是一種常見的特征提取算法,是基于本地像素塊進(jìn)行特征直方圖提取的一種算法,對(duì)象局部的變形與光照影響有很好
2022-07-05 11:02:121554 SIFT特征是非常穩(wěn)定的圖像特征,在圖像搜索、特征匹配、圖像分類檢測(cè)等方面應(yīng)用十分廣泛,但是它的缺點(diǎn)也是非常明顯,就是計(jì)算量比較大,很難實(shí)時(shí),所以對(duì)一些實(shí)時(shí)要求比較高的常見SIFT算法還是無法適用。
2022-11-23 09:48:211090 深度學(xué)習(xí)數(shù)據(jù)預(yù)處理中常用opencv讀入圖片,一般在`__getitem__`函數(shù)中調(diào)用。本文主要介紹opencv讀取圖片的一些細(xì)節(jié)以及注意事項(xiàng)。本文中使用的圖片見第6節(jié)“opencv測(cè)試使用的圖片”。
2023-02-07 16:06:05428 深度學(xué)習(xí)數(shù)據(jù)預(yù)處理中常用opencv讀入圖片,一般在`__getitem__`函數(shù)中調(diào)用。本文主要介紹opencv讀取圖片的一些細(xì)節(jié)以及注意事項(xiàng)。本文中使用的圖片見第6節(jié)“opencv測(cè)試使用的圖片”。
2023-02-07 16:06:18472 機(jī)器視覺算法有很多,以下是其中一些常見的算法:
邊緣檢測(cè)算法:用于檢測(cè)圖像中的邊緣,如Sobel算法、Canny算法等。
特征提取算法:用于提取出圖像中的特征,如SIFT算法、SURF算法、ORB算法等。
2023-03-12 11:55:374687 基于labview2018的PPIPID算法詳解不喜歡看文字的可以直接看代碼,更明顯一點(diǎn)單步都分解開演示的
2023-03-16 17:23:315 [源代碼]Python算法詳解[源代碼]Python算法詳解
2023-06-06 17:50:170 OpenCV中自帶的模板匹配算法,完全是像素基本的模板匹配,特別容易受到光照影響,光照稍微有所不同,該方法就會(huì)歇菜了!搞得很多OpenCV初學(xué)者剛學(xué)習(xí)到該方法時(shí)候很開心,一用該方法馬上很傷心
2023-12-07 10:56:03318 
首先說一下模板匹配,它是OpenCV自帶的一個(gè)算法,可以根據(jù)一個(gè)模板圖到目標(biāo)圖上去尋找對(duì)應(yīng)位置,如果模板找的比較好那么效果顯著,這里說一下尋找模板的技巧,模板一定要標(biāo)準(zhǔn)、精準(zhǔn)且特征明顯。
2024-02-22 13:54:29159 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論