 電子發(fā)燒友App
電子發(fā)燒友App


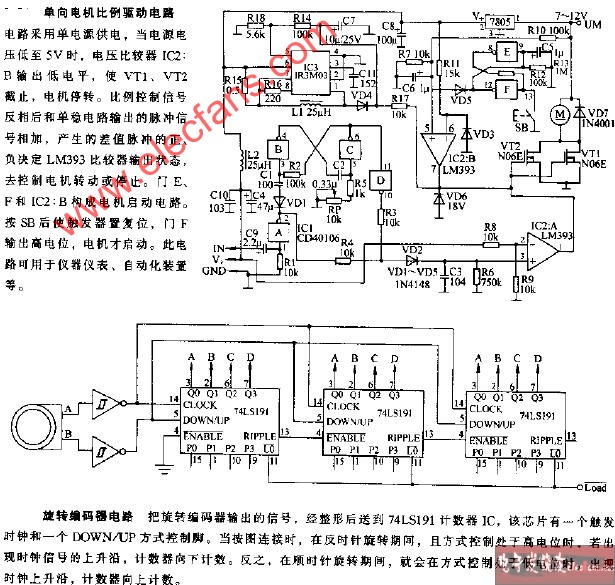
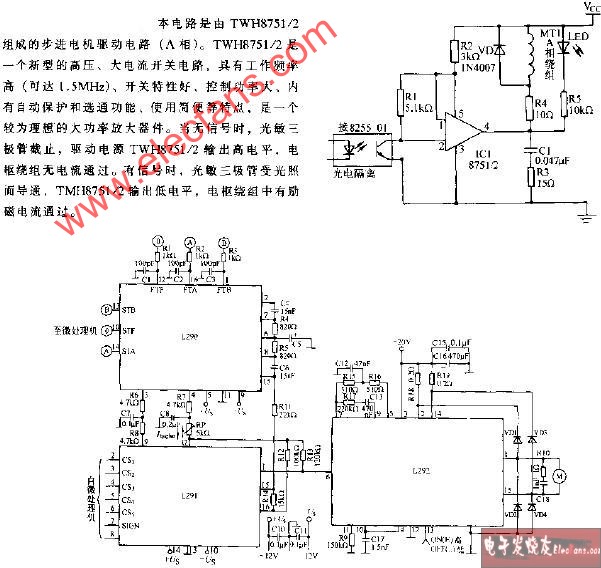
空模電機(jī)比例驅(qū)動(dòng)電路 本文介紹用于電動(dòng)空模動(dòng)力電機(jī)控制的單向電機(jī)比例驅(qū)動(dòng)電路,元件易購(gòu),電路簡(jiǎn)單,性?xún)r(jià)比高,非常適合具有一定電子技術(shù)礎(chǔ)的航空模型愛(ài)好者自制。 工作原理:D3、R8、R9、C5、TR1、IC1B構(gòu)成脈沖展寬電路。接收機(jī)輸出的脈沖信號(hào)由J1一l送入,經(jīng)比較展寬后從IC1的7腳送出驅(qū)動(dòng)T1、T2。脈沖信號(hào)增寬時(shí)電機(jī)通電時(shí)間加長(zhǎng)轉(zhuǎn)速增高,相反轉(zhuǎn)速降低。TR1用來(lái)調(diào)整電機(jī)的截止點(diǎn)。R1~R5、CI、L1、D2、IC1A構(gòu)成振蕩升壓電路,在C3上得到約25V電壓,經(jīng)R6、R11送到T1、T2。在IC1的7腳截止期間使T1、T2飽和導(dǎo)通。U2 用以防止升壓電路輸出電壓過(guò)高而損壞T1、T2。R7、R10、R12、U1、T3、T4、D2 構(gòu)成電壓檢測(cè)保護(hù)電路。當(dāng)電池電壓低于 5.2V時(shí),UI、T4截止,T3導(dǎo)通,將 T1、T2的驅(qū)動(dòng)電城市拉低。T1、T2因沒(méi)有驅(qū)動(dòng)電壓而不導(dǎo)通,同時(shí)U1的電壓也由T3經(jīng)D2而拉低使電路鎖定。保證電池電壓過(guò)低時(shí)關(guān)閉電機(jī),以維持接收機(jī)和各舵機(jī)的正常供電。保證模型的安全回收。IC2將電池電壓穩(wěn)定在5V后供給電路和接收機(jī)使用。L1、CD4用來(lái)防止電機(jī)和電路產(chǎn)生干擾而影響接收機(jī)的正常工作。 元件選擇:IC1采用雙運(yùn)放LM393。T1、T2采用RRF60N06,電阻、電容、三極管最好采用小型元件。整個(gè)電路可安裝在一塊4X3平方厘米的小印板上。 |
- 驅(qū)動(dòng)電路(107063)
- 圖文空模(5617)


聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。 舉報(bào)投訴
相關(guān)推薦
直流有刷電機(jī)驅(qū)動(dòng)電路
 525
525什么是共模電壓呢?聊聊電機(jī)軸承電腐蝕
643
圖文并茂:詳細(xì)解析無(wú)刷電機(jī)EMI整改?|深圳比創(chuàng)達(dá)EMC(上)
220基于IC555的伺服電機(jī)驅(qū)動(dòng)電路
254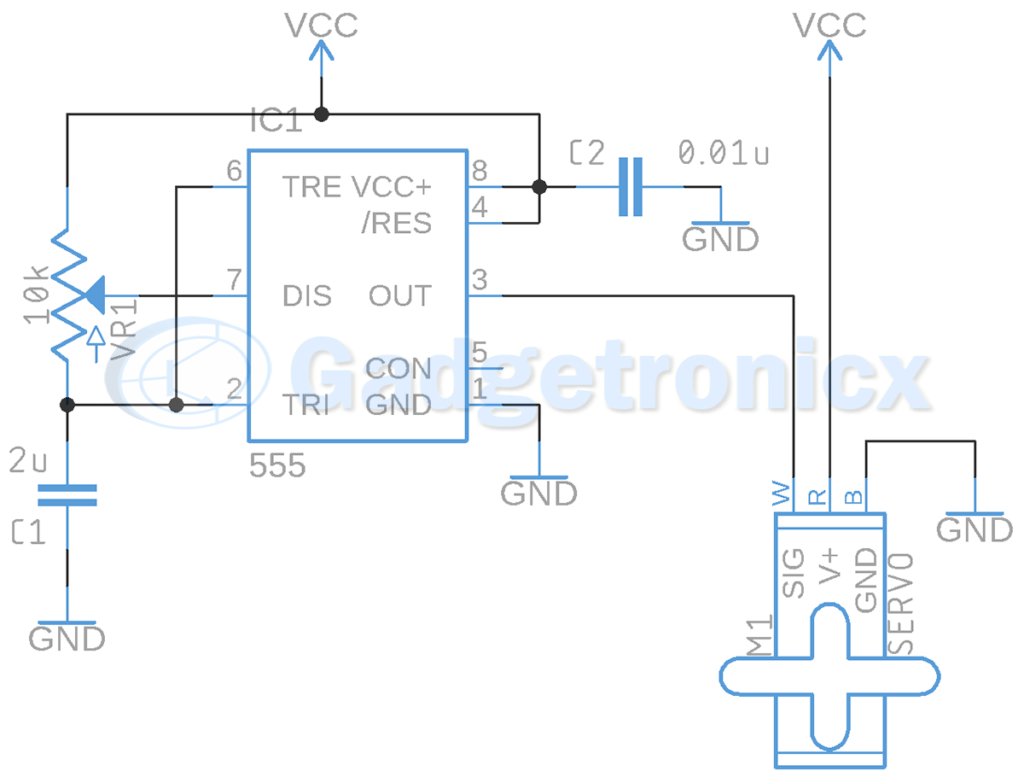
步進(jìn)電機(jī)的驅(qū)動(dòng)與控制 三相步進(jìn)電機(jī)的驅(qū)動(dòng)電路
 5
5有沒(méi)有模電的好資料分享
步進(jìn)電機(jī)驅(qū)動(dòng)電路和控制電路簡(jiǎn)述
1726步進(jìn)電機(jī)驅(qū)動(dòng)教程_步進(jìn)電機(jī)功率計(jì)算
2204有刷電機(jī)單開(kāi)關(guān)電路驅(qū)動(dòng)、半橋電路驅(qū)動(dòng)方法
530
兩相單極步進(jìn)電機(jī)的驅(qū)動(dòng)電路
1478
有刷電機(jī)驅(qū)動(dòng)方法:通過(guò)單開(kāi)關(guān)電路和半橋電路進(jìn)行驅(qū)動(dòng)
743
分享六種步進(jìn)電機(jī)驅(qū)動(dòng)電路
2946H橋電機(jī)驅(qū)動(dòng)電路解析
5698步進(jìn)電機(jī)/電機(jī)驅(qū)動(dòng)器電路板開(kāi)源分享
5基于電機(jī)的應(yīng)用制作一個(gè)8通道電機(jī)驅(qū)動(dòng)器模塊電路
1813H橋電機(jī)驅(qū)動(dòng)電路設(shè)計(jì)與解析
7447LN8515 是一款DC 雙向馬達(dá)驅(qū)動(dòng)電路 電機(jī)驅(qū)動(dòng)、電磁門(mén)鎖驅(qū)動(dòng)
技術(shù)資訊 | 直流電機(jī)驅(qū)動(dòng)電路設(shè)計(jì)
660
使用MOSFET的H橋電機(jī)驅(qū)動(dòng)電路
2811
直流電機(jī)驅(qū)動(dòng)控制電路設(shè)計(jì)
586
《電機(jī)驅(qū)動(dòng)與控制專(zhuān)用集成電路及應(yīng)用》pdf
91圖文講解無(wú)刷直流電機(jī)的工作原理
27幾種小型直流電機(jī)驅(qū)動(dòng)電路?
15397
步進(jìn)電機(jī)驅(qū)動(dòng)電路圖大全(六款二相步進(jìn)電機(jī)/三相反應(yīng)式/LT2221驅(qū)動(dòng)電路)
53837
電流檢測(cè)利用adum3223/ad8418電機(jī)驅(qū)動(dòng)電路的共模瞬態(tài)
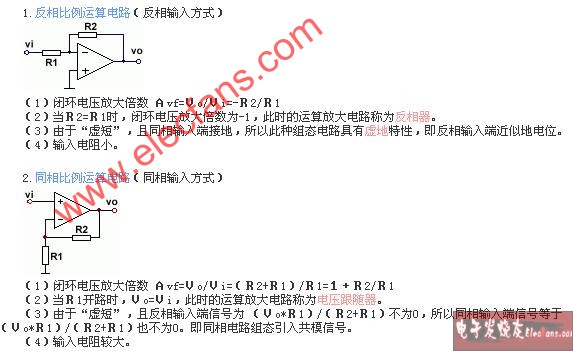
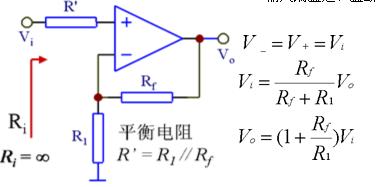
38比例運(yùn)算電路的工作原理和比例運(yùn)算電路如何分類(lèi)以及比例運(yùn)算電路如何計(jì)算?
72158
詳細(xì)解析電機(jī)驅(qū)動(dòng)電路典型設(shè)計(jì)
5189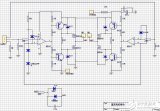
基于滑模的直接轉(zhuǎn)矩控制車(chē)用驅(qū)動(dòng)電機(jī)的研究
0空模無(wú)刷馬達(dá)電子調(diào)速器(ESC)說(shuō)明書(shū)
12電機(jī)驅(qū)動(dòng)電路的作用與電路原理圖
54117
直流電機(jī)幾種驅(qū)動(dòng)電路設(shè)計(jì)思路
106672
開(kāi)關(guān)磁阻電機(jī)驅(qū)動(dòng)電路
35電機(jī)驅(qū)動(dòng)系統(tǒng)電機(jī)端共模電壓的研究
5步進(jìn)電機(jī)驅(qū)動(dòng)電路設(shè)計(jì)與實(shí)現(xiàn)研究
21步進(jìn)電機(jī)原理及簡(jiǎn)易驅(qū)動(dòng)電路的制作
30步進(jìn)電機(jī)及驅(qū)動(dòng)電路
24基于共模扼流圈的高速CCD驅(qū)動(dòng)電路設(shè)計(jì)方案
3242
步進(jìn)電機(jī)驅(qū)動(dòng)電路原理圖
11307
步進(jìn)電機(jī)驅(qū)動(dòng)控制電路原理圖
8209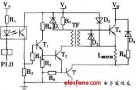
步進(jìn)電機(jī)及其驅(qū)動(dòng)電路原理圖
30112
微型電機(jī)驅(qū)動(dòng)電路實(shí)驗(yàn)分析
1185
雙極性步進(jìn)電機(jī)驅(qū)動(dòng)電路
5927
基于FPGA的兩相步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)電路設(shè)計(jì)
50GTR比例驅(qū)動(dòng)電路
19步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)電路及原理
17847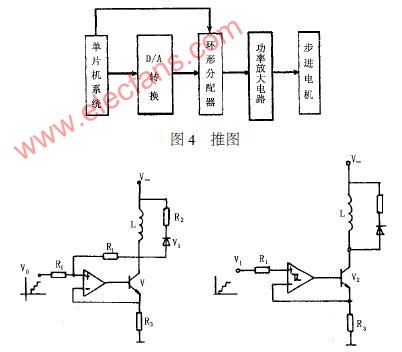
微型電機(jī)驅(qū)動(dòng)電路原理分析及實(shí)驗(yàn)
2499
無(wú)線比例電機(jī)遙控器的設(shè)計(jì)原理
1848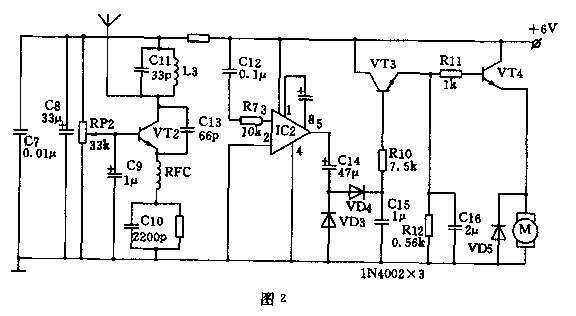
脈寬調(diào)制電機(jī)驅(qū)動(dòng)電路
934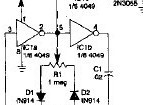
H橋式電機(jī)驅(qū)動(dòng)電路的工作原理
8485
超聲成像系統(tǒng)步進(jìn)電機(jī)驅(qū)動(dòng)電路的設(shè)計(jì)
45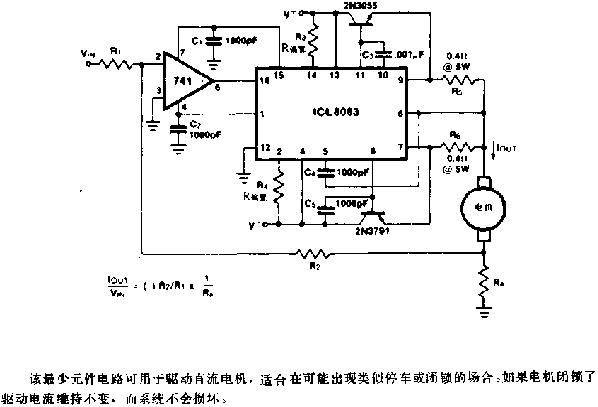
超聲電機(jī)驅(qū)動(dòng)及控制電路的設(shè)計(jì)
6708
比例電磁鐵驅(qū)動(dòng)電路
8619
PWM電機(jī)驅(qū)動(dòng)系統(tǒng)傳導(dǎo)共模EMI抑制技術(shù)的研究現(xiàn)狀
33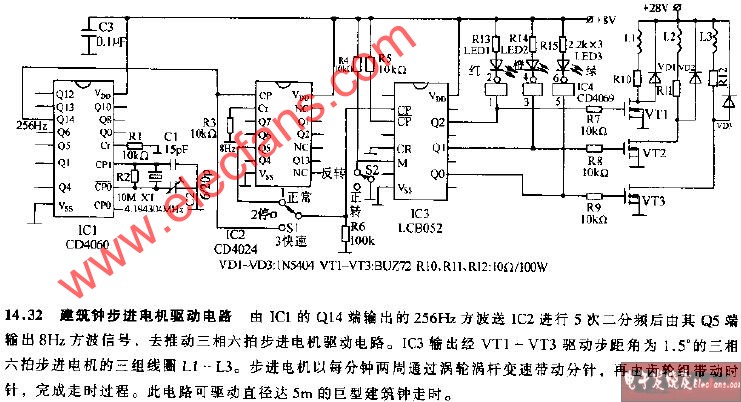
同相比例放大電路
28143實(shí)用的步進(jìn)電機(jī)驅(qū)動(dòng)電路
64步進(jìn)電機(jī)驅(qū)動(dòng)電路
32634
- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無(wú)線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車(chē)電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專(zhuān)欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 社區(qū)
- 小組
- 論壇
- 問(wèn)答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開(kāi)發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:[email protected]
- 內(nèi)容合作
- 黃晶晶:[email protected]
- 內(nèi)容合作(海外)
- 張迎輝:[email protected]
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:[email protected]
- 投資合作
- 曾海銀:[email protected]
- 社區(qū)合作
- 劉勇:[email protected]
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無(wú)線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車(chē)電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專(zhuān)欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 社區(qū)
- 小組
- 論壇
- 問(wèn)答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開(kāi)發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:[email protected]
- 內(nèi)容合作
- 黃晶晶:[email protected]
- 內(nèi)容合作(海外)
- 張迎輝:[email protected]
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:[email protected]
- 投資合作
- 曾海銀:[email protected]
- 社區(qū)合作
- 劉勇:[email protected]
-
關(guān)注我們的微信
-
下載發(fā)燒友APP
-
電子發(fā)燒友觀察
評(píng)論