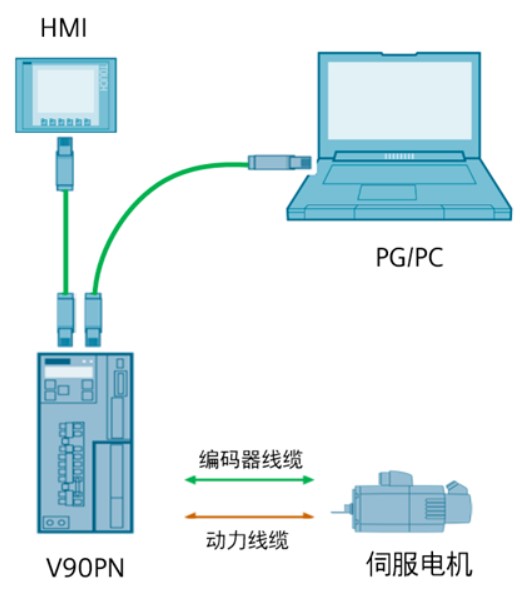
如何實(shí)現(xiàn)SIMATIC HMI對驅(qū)動(dòng)參數(shù)的直接訪問呢
SINAMICS V90PN驅(qū)動(dòng)器可以通過模擬S7-CPU,將數(shù)據(jù)庫訪問從HMI映射到驅(qū)動(dòng)參數(shù),該功....
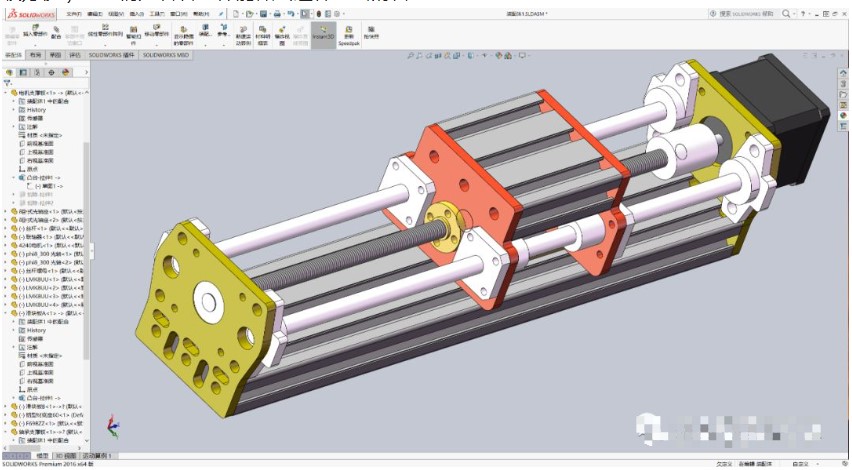
什么是直線滑臺(tái)?直線滑臺(tái)有什么作用?
步進(jìn)電機(jī)有各種大小、長度尺寸。我們這個(gè)直線滑臺(tái)采用的電機(jī)為42步進(jìn)電機(jī),步進(jìn)電機(jī)的方形外形對邊距離為....
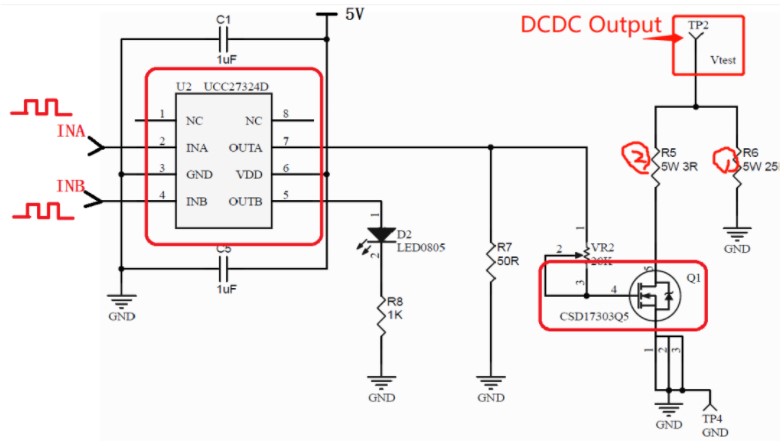
MOSFET驅(qū)動(dòng)電路小結(jié)
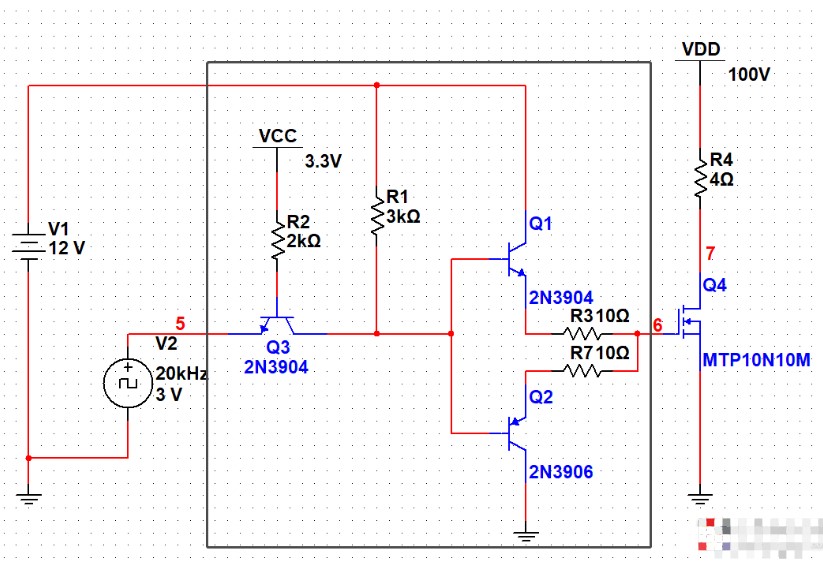
由于以前沒有MOS管驅(qū)動(dòng)的經(jīng)驗(yàn),估計(jì)我自己設(shè)計(jì)的話,直接就用一個(gè)555定時(shí)器驅(qū)動(dòng)如上圖所示的Q1,結(jié)....
低邊MOS管驅(qū)動(dòng)器是如何工作的
當(dāng)控制電壓由低變高時(shí),柵極電壓開始時(shí)有一個(gè)3V的臺(tái)階,分析認(rèn)為是Q3截止后,3.3偏置電壓經(jīng)過BC結(jié)....
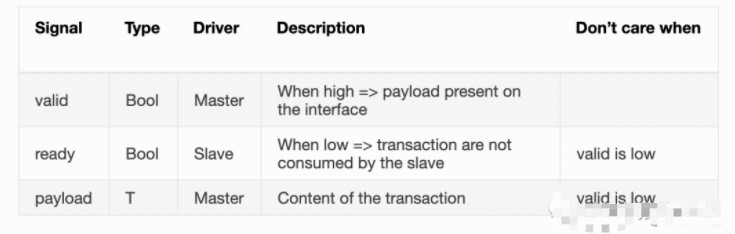
介紹3個(gè)時(shí)序優(yōu)化的RTL改動(dòng)及其中Formal SEC的角色
對于這種pipe個(gè)數(shù)變化,但是端到端功能不變的修改,同樣可以使用sequential FEC來進(jìn)行等....
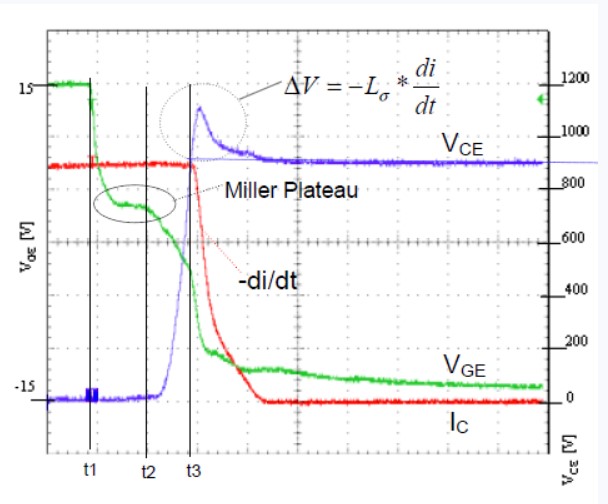
介紹幾種普遍使用的集電極電壓尖峰抑制的方法
IGBT關(guān)斷時(shí),集電極電流Ic迅速減小到0,急劇變化的di/dt流經(jīng)在系統(tǒng)雜散電感,產(chǎn)生感應(yīng)電壓ΔV....
Linux內(nèi)核IO多路復(fù)用之epoll簡介
epoll的優(yōu)點(diǎn)是支持大數(shù)目的描述符,IO效率不隨描述符數(shù)目增加而線性下降。所以在高并發(fā)網(wǎng)絡(luò)中應(yīng)用比....
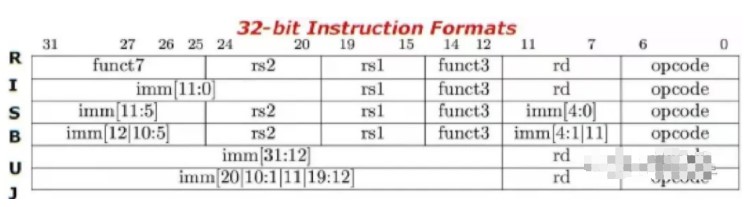
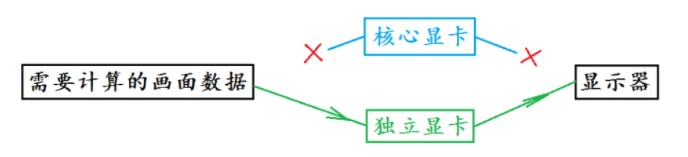
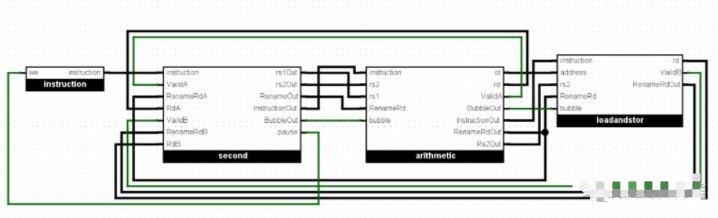
該怎樣去編寫CPU指令呢?過程是怎樣的
一般我們進(jìn)行計(jì)算機(jī)編程的時(shí)候,代碼最好是干練的,這樣運(yùn)行效率才最高。所以像第一個(gè)例子中的兩個(gè)立即數(shù)相....
如何在Linux中使用nmcli命令添加和管理網(wǎng)絡(luò)連接
nmcli 實(shí)用程序是在 Linux 系統(tǒng)上添加和管理網(wǎng)絡(luò)連接的有用工具。它提供了簡單的命令行選項(xiàng)來....

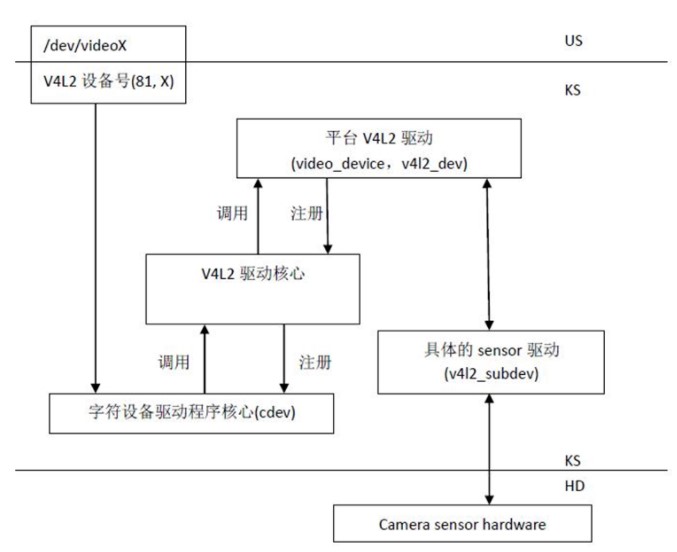
Linux內(nèi)核之ISP驅(qū)動(dòng)流程分析
應(yīng)用層就是通過訪問video_device生成的節(jié)點(diǎn)來進(jìn)行操作Camera,所以video_devi....
Linux內(nèi)核之Camera驅(qū)動(dòng)分析
上面主要是根據(jù)全局變量ov13850_custom_config中的信息填充時(shí)序信息。然后初始化v4....
看看Linux為相機(jī)提供的驅(qū)動(dòng)框架
? V4L2 (Video Linux Two),是為支持Linux內(nèi)核設(shè)計(jì)的驅(qū)動(dòng)框架驅(qū)動(dòng)框架。為應(yīng)....
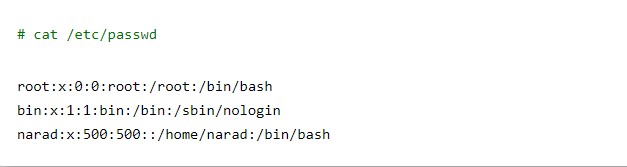
分享linux中的13個(gè)基本Cat命令案例
當(dāng)您將重定向與標(biāo)準(zhǔn)輸入一起使用時(shí)<'(小于符號),它使用文件名test2作為命令的輸入,輸出將顯示在終端中。
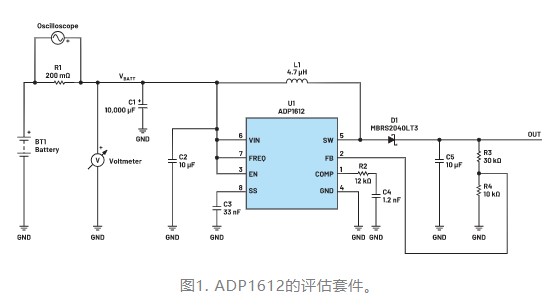
自舉技術(shù)增強(qiáng)了電池在驅(qū)動(dòng)重負(fù)載時(shí)的效率
自舉技術(shù)適用于在啟動(dòng)時(shí)不會(huì)斷開電池電壓和輸出之間連接的任何升壓轉(zhuǎn)換器,可以通過使用具有非常低的靜態(tài)電....
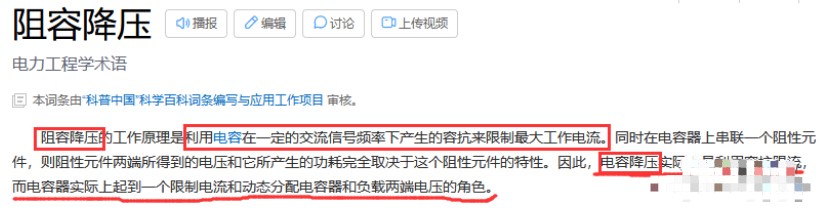
聊聊阻容降壓電路的原理和實(shí)際使用電路
假負(fù)載上圖中沒有,就是與穩(wěn)壓管并聯(lián)一個(gè)電阻,在沒有真正負(fù)載的時(shí)候,這個(gè)電阻就成了這個(gè)電路的負(fù)載,用來....
同步BUCK芯片的電性能參數(shù)解讀(下)
FCCM模式,負(fù)載從空載到滿載變化時(shí),不改變開關(guān)頻率。AAM模式,負(fù)載從空載到滿載變化時(shí),Vcomp....






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)