關(guān)于3D激光相機(jī)的工作原理
一般3D相機(jī)都會(huì)集成在一個(gè)框架內(nèi),不會(huì)像2D視覺(jué)系統(tǒng)那樣區(qū)分開(kāi)來(lái)。這里我放一張基恩士最新型的一款3D....
能否把電腦當(dāng)作工控機(jī)來(lái)使用?
個(gè)人或辦公電腦一般安裝的是Windows操作系統(tǒng),擁有成熟的軟件生態(tài),影音娛樂(lè)一應(yīng)俱全。
關(guān)于相似邊距離測(cè)量條碼譯碼識(shí)別方案
本方案將搭建一個(gè)基于機(jī)器視覺(jué)的流水線檢測(cè)手機(jī)條碼平臺(tái),把產(chǎn)品放置于流水線上,高速工業(yè)相機(jī)對(duì)其逐一采集....
真實(shí)場(chǎng)景的雙目立體匹配獲取深度圖詳解
攝像機(jī)內(nèi)參反映的是攝像機(jī)坐標(biāo)系到圖像坐標(biāo)系之間的投影關(guān)系。攝像機(jī)內(nèi)參的標(biāo)定使用張正友標(biāo)定法,簡(jiǎn)單易操....
膠囊機(jī)器人是如何完成深度學(xué)習(xí)與算法訓(xùn)練的?
通俗一點(diǎn)講,機(jī)器人不是人,它的視覺(jué)和決策能力,都需要研制者通過(guò)一些方法賦予給它。通過(guò)深度學(xué)習(xí)獲得的能....
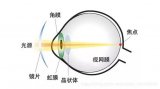
為什么需要鏡頭?機(jī)器視覺(jué)鏡頭基礎(chǔ)知識(shí)
鏡頭相當(dāng)于充當(dāng)晶狀體這一環(huán)節(jié),簡(jiǎn)而言之,鏡頭主要的作用就是聚光。為什么要聚光?比如說(shuō)在大晴天用放大鏡....
什么是相機(jī)標(biāo)定?常用的相機(jī)標(biāo)定方法
在圖像測(cè)量過(guò)程以及機(jī)器視覺(jué)應(yīng)用中,為確定空間物體表面某點(diǎn)的三維幾何位置與其在圖像中對(duì)應(yīng)點(diǎn)之間的相互關(guān)....

關(guān)于線陣相機(jī)的傳感器
相機(jī)的選擇十分重要,直接關(guān)系到整體設(shè)備的成本,像素多就要采用大的鏡頭,數(shù)據(jù)量大就要采用傳輸率大的數(shù)據(jù)....
使用面陣相機(jī)進(jìn)行傳送帶視頻流的拼接
一般在工業(yè)上會(huì)采用硬件改進(jìn)的方法。當(dāng)需要提高視覺(jué)識(shí)別的精度或者范圍時(shí),會(huì)采用多個(gè)相機(jī)圖像進(jìn)行拼接的辦....
一種特征法視覺(jué)SLAM逆深度濾波的三維重建方法
直接法不必進(jìn)行特征提取與匹配,因而具備了更高的計(jì)算效率,但它易受相機(jī)曝光、環(huán)境光源等因素影響,當(dāng)場(chǎng)景....
了解線陣相機(jī)與面陣相機(jī)的基本區(qū)別
主要應(yīng)用于工業(yè)、醫(yī)療、科研與安全領(lǐng)域的圖象處理。典型應(yīng)用領(lǐng)域是檢測(cè)連續(xù)的材料,例如金屬、塑料、紙和纖....
視覺(jué)SLAM與激光SLAM有什么區(qū)別?
在業(yè)內(nèi),視覺(jué)SLAM與激光SLAM誰(shuí)更勝一籌,誰(shuí)將成為未來(lái)主流趨勢(shì)這一問(wèn)題,成為大家關(guān)注的熱點(diǎn),不同....

常見(jiàn)的激光三角測(cè)量法
傳感器中激光發(fā)射器通過(guò)鏡頭將可見(jiàn)激光射向被測(cè)物體表面,經(jīng)物體反射的激光通過(guò)接收器鏡頭,被內(nèi)部的CCD....
AOI測(cè)試作用與檢測(cè)原理
LED光源:在電池片停留位置的四周放置四個(gè)光源對(duì)電池片進(jìn)行打光,增強(qiáng)電池片亮度,讓相機(jī)更好的提取電池....

如何讓深度精度更高?
這可再熟悉不過(guò)了,DDD是深度,BBB是基線,fff是焦距(像素單位),ddd是視差。咱們一分為二看....
TDI-CCD的工作原理
?TDI-CCD的工作原理與普通線陣CCD的工作原理有所不同,它要求行掃速率與目標(biāo)的運(yùn)動(dòng)速率嚴(yán)格同步....
AGV的主要導(dǎo)引和導(dǎo)航方式
目前AGV的工作環(huán)境可分為室內(nèi)環(huán)境和室外環(huán)境,更多的系統(tǒng)是工作于室內(nèi)或以室內(nèi)為主要工作場(chǎng)所。因?yàn)槭覂?nèi)....

工業(yè)機(jī)器人的眼睛視覺(jué)系統(tǒng)通常由以下構(gòu)成
為了明確什么哪個(gè)才是最重要的,最好做一張?jiān)u估表,列出“必須做”和“可以做”的測(cè)試。一旦主要的對(duì)測(cè)試標(biāo)....
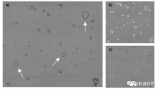
計(jì)算機(jī)視覺(jué)中的Blob分析
舉例來(lái)說(shuō),假如現(xiàn)在有一塊剛生產(chǎn)出來(lái)的玻璃,表面非常光滑,平整。如果這塊玻璃上面沒(méi)有瑕疵,那么,我們是....
國(guó)內(nèi)外三維視覺(jué)測(cè)量系統(tǒng)的發(fā)展現(xiàn)狀
從狹義上講,三維視覺(jué)測(cè)量技術(shù)即通過(guò)計(jì)算機(jī)分析處理,讓計(jì)算機(jī)不僅具有和人眼一樣的視覺(jué)感受,而且能夠獲得....
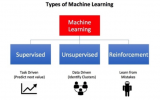
什么是深度強(qiáng)化學(xué)習(xí)?
不過(guò),深度神經(jīng)網(wǎng)絡(luò)系統(tǒng)往往需要大量的訓(xùn)練數(shù)據(jù),以及已知答案的帶標(biāo)簽樣本,才能正常地工作。并且,它們目....
如何才能讓機(jī)器視覺(jué)系統(tǒng)更為穩(wěn)定
機(jī)器視覺(jué)系統(tǒng)包含一些重要部件,光源,鏡頭,相機(jī),圖像采集卡,數(shù)據(jù)傳輸,圖像處理和測(cè)量軟件等。隨著各個(gè)....

工業(yè)機(jī)器人產(chǎn)業(yè)鏈分析
回顧日本的工業(yè)機(jī)器人發(fā)展歷程,可以看到推廣工業(yè)機(jī)器人是日本在產(chǎn)業(yè)升級(jí)、人口老齡化等多重壓力下的必然選....

按照點(diǎn)云處理形式對(duì)現(xiàn)有方法進(jìn)行分類(lèi)和梳理
怎么評(píng)價(jià)這種思路呢?其實(shí)還是不錯(cuò)的,除了分類(lèi)任務(wù),在點(diǎn)云目標(biāo)檢測(cè)中,也有不少論文采用了這種思路,比如....
手機(jī)鏡頭目標(biāo)提取、缺陷檢測(cè)與圖像畸變校正
這個(gè)問(wèn)題是目標(biāo)檢測(cè),并且需求十分明確:提取出白色圓環(huán)中的區(qū)域的圖像。觀察圖像可以發(fā)現(xiàn)圖中白色的部分幾....
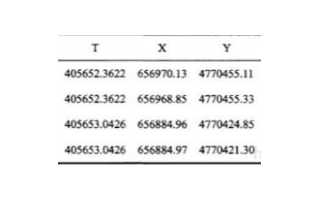
機(jī)器視覺(jué)測(cè)量原理與機(jī)器視覺(jué)測(cè)量?jī)?yōu)勢(shì)
測(cè)量原理:利用CCD攝像機(jī)可以獲得三維物體的二維圖像,即可以實(shí)現(xiàn)實(shí)際空間坐標(biāo)系與攝像機(jī)平面坐標(biāo)系之間....

多光譜相機(jī)的基本構(gòu)成
人眼所能能識(shí)別的光譜區(qū)間為可見(jiàn)光區(qū)間,波長(zhǎng)從400nm到700nm;普通數(shù)碼相機(jī)的光譜響應(yīng)區(qū)間與人眼....





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)