") 真實(shí)場景的雙目立體匹配獲取深度圖詳解
真實(shí)場景的雙目立體匹配獲取深度圖詳解
雙目立體匹配一直是雙目視覺的研究熱點(diǎn),雙目相機(jī)拍攝同一場景的左、右兩幅視點(diǎn)圖像,運(yùn)用立體匹配匹配算法獲取視差圖,進(jìn)而獲取深度圖。而深度圖的應(yīng)用范圍非常廣泛,由于其能夠記錄場景中物體距離攝像機(jī)的距離,可以用以測量、三維重建、以及虛擬視點(diǎn)的合成等。
之前有兩篇博客簡要講過OpenCV3.4中的兩種立體匹配算法效果比較。以及利用視差圖合成新視點(diǎn)。里面用到的匹配圖像對是OpenCV自帶校正好的圖像對。而目前大多數(shù)立體匹配算法使用的都是標(biāo)準(zhǔn)測試平臺提供的標(biāo)準(zhǔn)圖像對,比如著名的有如下兩個(gè):
MiddleBury
KITTI
但是對于想自己嘗試拍攝雙目圖片進(jìn)行立體匹配獲取深度圖,進(jìn)行三維重建等操作的童鞋來講,要做的工作是比使用校正好的標(biāo)準(zhǔn)測試圖像對要多的。因此博主覺得有必要從用雙目相機(jī)拍攝圖像開始,捋一捋這整個(gè)流程。
主要分四個(gè)部分講解:
攝像機(jī)標(biāo)定(包括內(nèi)參和外參)
雙目圖像的校正(包括畸變校正和立體校正)
立體匹配算法獲取視差圖,以及深度圖
利用視差圖,或者深度圖進(jìn)行虛擬視點(diǎn)的合成
注:如果沒有雙目相機(jī),可以使用單個(gè)相機(jī)平行移動拍攝,外參可以通過攝像機(jī)自標(biāo)定算出。我用自己的手機(jī)拍攝,拍攝移動時(shí)盡量保證平行移動。
一、攝像機(jī)標(biāo)定
1.內(nèi)參標(biāo)定
攝像機(jī)內(nèi)參反映的是攝像機(jī)坐標(biāo)系到圖像坐標(biāo)系之間的投影關(guān)系。攝像機(jī)內(nèi)參的標(biāo)定使用張正友標(biāo)定法,簡單易操作,具體原理請拜讀張正友的大作《A Flexible New Technique for Camera Calibration》。當(dāng)然網(wǎng)上也會有很多資料可供查閱,MATLAB 有專門的攝像機(jī)標(biāo)定工具包,OpenCV封裝好的攝像機(jī)標(biāo)定API等。使用OpenCV進(jìn)行攝像機(jī)標(biāo)定的可以參考我的第一篇博客:http://www.cnblogs.com/riddick/p/6696858.html。里面提供有張正友標(biāo)定法OpenCV實(shí)現(xiàn)的源代碼git地址,僅供參考。
攝像機(jī)的內(nèi)參包括,fx, fy, cx, cy,以及畸變系數(shù)[k1,k2,p1,p2,k3],詳細(xì)就不贅述。我用手機(jī)對著電腦拍攝各個(gè)角度的棋盤格圖像,棋盤格圖像如圖所示:
使用OpenCV3.4+VS2015對手機(jī)進(jìn)行內(nèi)參標(biāo)定。標(biāo)定結(jié)果如下,手機(jī)鏡頭不是魚眼鏡頭,因此使用普通相機(jī)模型標(biāo)定即可:
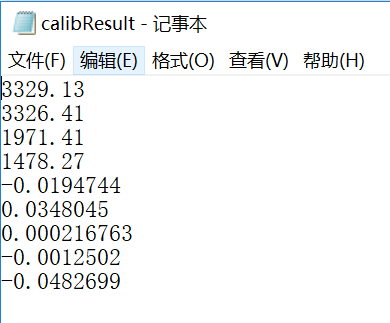
圖像分辨率為:3968 x 2976。上面標(biāo)定結(jié)果順序依次為fx, fy, cx, cy, k1, k2, p1, p2, k3, 保存到文件中供后續(xù)使用。
2.外參標(biāo)定
攝像機(jī)外參反映的是攝像機(jī)坐標(biāo)系和世界坐標(biāo)系之間的旋轉(zhuǎn)R和平移T關(guān)系。如果兩個(gè)相機(jī)的內(nèi)參均已知,并且知道各自與世界坐標(biāo)系之間的R1、T1和R2,T2,就可以算出這兩個(gè)相機(jī)之間的Rotation和Translation,也就找到了從一個(gè)相機(jī)坐標(biāo)系到另一個(gè)相機(jī)坐標(biāo)系之間的位置轉(zhuǎn)換關(guān)系。攝像機(jī)外參標(biāo)定也可以使用標(biāo)定板,只是保證左、右兩個(gè)相機(jī)同時(shí)拍攝同一個(gè)標(biāo)定板的圖像。外參一旦標(biāo)定好,兩個(gè)相機(jī)的結(jié)構(gòu)就要保持固定,否則外參就會發(fā)生變化,需要重新進(jìn)行外參標(biāo)定。
那么手機(jī)怎么保證拍攝同一個(gè)標(biāo)定板圖像并能夠保持相對位置不變,這個(gè)是很難做到的,因?yàn)楹罄m(xù)用來拍攝實(shí)際測試圖像時(shí),手機(jī)的位置肯定會發(fā)生變化。因此我使用外參自標(biāo)定的方法,在拍攝實(shí)際場景的兩張圖像時(shí),進(jìn)行攝像機(jī)的外參自標(biāo)定,從而獲取當(dāng)時(shí)兩個(gè)攝像機(jī)位置之間的Rotation和Translation。
比如:我拍攝這樣兩幅圖像,以后用來進(jìn)行立體匹配和虛擬視點(diǎn)合成的實(shí)驗(yàn)。
① 利用攝像機(jī)內(nèi)參進(jìn)行畸變校正,手機(jī)的畸變程度都很小,校正后的兩幅圖如下:
② 將上面兩幅畸變校正后的圖作為輸入,使用OpenCV中的光流法提取匹配特征點(diǎn)對,pts1和pts2,在圖像中畫出如下:
③ 利用特征點(diǎn)對pts1和pts2,以及內(nèi)參矩陣camK,解算出本質(zhì)矩陣E:
cv::Mat E = cv::findEssentialMat(tmpPts1, tmpPts2,camK, CV_RANSAC);
④ 利用本質(zhì)矩陣E解算出兩個(gè)攝像機(jī)之間的Rotation和Translation,也就是兩個(gè)攝像機(jī)之間的外參。以下是OpenCV中API函數(shù)實(shí)現(xiàn)的,具體請參見API文檔:
cv::Mat R1, R2; cv::decomposeEssentialMat(E, R1, R2, t); R = R1.clone(); t = -t.clone();
二、雙目圖像的校正
1. 畸變校正
畸變校正前面已經(jīng)介紹過,利用畸變系數(shù)進(jìn)行畸變校正即可,下面說一下立體校正。
2. 立體校正
① 得到兩個(gè)攝像機(jī)之間的 Rotation和Translation之后,要用下面的API對兩幅圖像進(jìn)行立體對極線校正,這就需要算出兩個(gè)相機(jī)做對極線校正需要的R和T,用R1,T1, R2, T2表示,以及透視投影矩陣P1,P2:
cv::stereoRectify(camK, D, camK, D, imgL.size(), R, -R*t,R1, R2, P1, P2, Q);
② 得到上述參數(shù)后,就可以使用下面的API進(jìn)行對極線校正操作了,并將校正結(jié)果保存到本地:
cv::Rect(0, 0, 3, 3)),D, R1, P1(cv::Rect(0, 0, 3, 3)), imgL.size(), CV_32FC1,mapx, mapy);cv::remap(imgL, recImgL, mapx, mapy, CV_INTER_LINEAR); cv::imwrite("data/recConyL.png", recImgL); cv::Rect(0, 0, 3, 3)),D, R2, P2(cv::Rect(0, 0, 3, 3)), imgL.size(), CV_32FC1,mapx, mapy);cv::remap(imgR, recImgR, mapx, mapy, CV_INTER_LINEAR); cv::imwrite("data/recConyR.png", recImgR);
對極線校正結(jié)果如下所示,查看對極線校正結(jié)果是否準(zhǔn)確,可以通過觀察若干對應(yīng)點(diǎn)是否在同一行上粗略估計(jì)得出:
三、立體匹配
1. SGBM算法獲取視差圖
立體校正后的左右兩幅圖像得到后,匹配點(diǎn)是在同一行上的,可以使用OpenCV中的BM算法或者SGBM算法計(jì)算視差圖。由于SGBM算法的表現(xiàn)要遠(yuǎn)遠(yuǎn)優(yōu)于BM算法,因此采用SGBM算法獲取視差圖。SGBM中的參數(shù)設(shè)置如下:
int numberOfDisparities = ((imgSize.width / 8)+ 15) & -16; cv::Ptr
默認(rèn)計(jì)算出的是左視差圖,如果需要計(jì)算右視差圖,則將上面加粗的三條語句替換為下面前三條語句。由于視差值計(jì)算出來為負(fù)值,disp類型為16SC1,因此需要取絕對值,然后保存:
sgbm->setMinDisparity(-numberOfDisparities); sgbm->setNumDisparities(numberOfDisparities); sgbm->compute(imgR, imgL, disp);disp = abs(disp);
SGBM算法得到的左、右視差圖如下,左視差圖的數(shù)據(jù)類型為CV_16UC1,右視差圖的數(shù)據(jù)類型為CV_16SC1(SGBM中視差圖中不可靠的視差值設(shè)置為最小視差(mindisp-1)*16。因此在此例中,左視差圖中不可靠視差值設(shè)置為-16,截?cái)嘀禐?;右視差圖中不可靠視差值設(shè)置為(-numberOfDisparities-1)*16,取絕對值后為(numberOfDisparities+1)*16,所以兩幅圖會有較大差別):
左視差圖(不可靠視差值為0) 右視差圖(不可靠視差值為 (numberOfDisparities+1)*16)
如果將右視差圖不可靠視差值也設(shè)置為0,則如下:
至此,左視差圖和右視差圖遙相呼應(yīng)。
2. 視差圖空洞填充
視差圖中視差值不可靠的視差大多數(shù)是由于遮擋引起,或者光照不均勻引起。既然牛逼如SGBM也覺得不可靠,那與其留著做個(gè)空洞,倒不如用附近可靠的視差值填充一下。
空洞填充也有很多方法,在這里我檢測出空洞區(qū)域,然后用附近可靠視差值的均值進(jìn)行填充。填充后的視差圖如下:
填充后左視差圖 填充后右視差圖
3. 視差圖轉(zhuǎn)換為深度圖
視差的單位是像素(pixel),深度的單位往往是毫米(mm)表示。而根據(jù)平行雙目視覺的幾何關(guān)系(此處不再畫圖推導(dǎo),很簡單),可以得到下面的視差與深度的轉(zhuǎn)換公式:
depth = ( f * baseline) / disp
上式中,depth表示深度圖;f表示歸一化的焦距,也就是內(nèi)參中的fx;baseline是兩個(gè)相機(jī)光心之間的距離,稱作基線距離;disp是視差值。等式后面的均已知,深度值即可算出。
在上面我們用SGBM算法獲取了視差圖,接下來轉(zhuǎn)換為深度圖,函數(shù)代碼如下:
/* 函數(shù)作用:視差圖轉(zhuǎn)深度圖 輸入: dispMap ----視差圖,8位單通道,CV_8UC1 K ----內(nèi)參矩陣,float類型 輸出: depthMap ----深度圖,16位無符號單通道,CV_16UC1 */void disp2Depth(cv::Mat dispMap, cv::Mat &depthMap, cv::Mat K) { int type = dispMap.type(); float fx = K.at
注:png的圖像格式可以保存16位無符號精度,即保存范圍為0-65535,如果是mm為單位,則最大能表示約65米的深度,足夠了。
上面代碼中我設(shè)置深度圖的精度為CV_16UC1,也就是ushort類型,將baseline設(shè)置為65mm,轉(zhuǎn)換后保存為png格式即可。如果保存為jpg或者bmp等圖像格式,會將數(shù)據(jù)截?cái)酁?-255。所以保存深度圖,png格式是理想的選擇。(如果不是為了獲取精確的深度圖,可以將baseline設(shè)置為1,這樣獲取的是相對深度圖,深度值也是相對的深度值)
轉(zhuǎn)換后的深度圖如下:
左深度圖 右深度圖
空洞填充后的深度圖,如下:
左深度圖(空洞填充后) 右深度圖(空洞填充后)
視差圖到深度圖完成。
注:視差圖和深度圖中均有計(jì)算不正確的點(diǎn),此文意在介紹整個(gè)流程,不特別注重算法的優(yōu)化,如有大神望不吝賜教。
附:視差圖和深度圖的空洞填充
步驟如下:
① 以視差圖dispImg為例。計(jì)算圖像的積分圖integral,并保存對應(yīng)積分圖中每個(gè)積分值處所有累加的像素點(diǎn)個(gè)數(shù)n(空洞處的像素點(diǎn)不計(jì)入n中,因?yàn)榭斩刺幭袼刂禐?,對積分值沒有任何作用,反而會平滑圖像)。
② 采用多層次均值濾波。首先以一個(gè)較大的初始窗口去做均值濾波(積分圖實(shí)現(xiàn)均值濾波就不多做介紹了,可以參考我之前的一篇博客),將大區(qū)域的空洞賦值。然后下次濾波時(shí),將窗口尺寸縮小為原來的一半,利用原來的積分圖再次濾波,給較小的空洞賦值(覆蓋原來的值);依次類推,直至窗口大小變?yōu)?x3,此時(shí)停止濾波,得到最終結(jié)果。
③ 多層次濾波考慮的是對于初始較大的空洞區(qū)域,需要參考更多的鄰域值,如果采用較小的濾波窗口,不能夠完全填充,而如果全部采用較大的窗口,則圖像會被嚴(yán)重平滑。因此根據(jù)空洞的大小,不斷調(diào)整濾波窗口。先用大窗口給所有空洞賦值,然后利用逐漸變成小窗口濾波覆蓋原來的值,這樣既能保證空洞能被填充上,也能保證圖像不會被過度平滑。
空洞填充的函數(shù)代碼如下,僅供參考:

1 void insertDepth32f(cv::Mat& depth) 2 { 3 const int width = depth.cols; 4 const int height = depth.rows; 5 float* data = (float*)depth.data; 6 cv::Mat integralMap = cv::zeros(height,width, CV_64F); 7 cv::Mat ptsMap = cv::zeros(height, width,CV_32S); 8 double* integral = (double*)integralMap.data; 9 int* ptsIntegral = (int*)ptsMap.data; 10 memset(integral, 0, sizeof(double) * width *height); 11 memset(ptsIntegral, 0, sizeof(int) * width *height); 12 for (int i = 0; i < height; ++i) 13 { 14 int id1 = i * width; 15 for (int j = 0; j < width; ++j) 16 { 17 int id2 = id1 + j; 18 if (data[id2] > 1e-3) 19 { 20 integral[id2] = data[id2]; 21 ptsIntegral[id2] = 1; 22 } 23 } 24 } 25 // 積分區(qū)間 26 for (int i = 0; i < height; ++i) 27 { 28 int id1 = i * width; 29 for (int j = 1; j < width; ++j) 30 { 31 int id2 = id1 + j; 32 integral[id2] += integral[id2 - 1]; 33 ptsIntegral[id2] += ptsIntegral[id2 - 1]; 34 } 35 } 36 for (int i = 1; i < height; ++i) 37 { 38 int id1 = i * width; 39 for (int j = 0; j < width; ++j) 40 { 41 int id2 = id1 + j; 42 integral[id2] += integral[id2 - width]; 43 ptsIntegral[id2] += ptsIntegral[id2 - width]; 44 } 45 } 46 int wnd; 47 double dWnd = 2; 48 while (dWnd > 1) 49 { 50 wnd = int(dWnd); 51 dWnd /= 2; 52 for (int i = 0; i < height; ++i) 53 { 54 int id1 = i * width; 55 for (int j = 0; j < width; ++j) 56 { 57 int id2 = id1 + j; 58 int left = j - wnd - 1; 59 int right = j + wnd; 60 int top = i - wnd - 1; 61 int bot = i + wnd; 62 left = max(0, left); 63 right = min(right, width - 1); 64 top = max(0, top); 65 bot = min(bot, height - 1); 66 int dx = right - left; 67 int dy = (bot - top) * width; 68 int idLeftTop = top * width + left; 69 int idRightTop = idLeftTop + dx; 70 int idLeftBot = idLeftTop + dy; 71 int idRightBot = idLeftBot + dx; 72 int ptsCnt = ptsIntegral[idRightBot]+ ptsIntegral[idLeftTop] - (ptsIntegral[idLeftBot] +ptsIntegral[idRightTop]); 73 double sumGray = integral[idRightBot]+ integral[idLeftTop] - (integral[idLeftBot] + integral[idRightTop]); 74 if (ptsCnt <= 0) 75 { 76 continue; 77 } 78 data[id2] = float(sumGray / ptsCnt); 79 } 80 } 81 int s = wnd / 2 * 2 + 1; 82 if (s > 201) 83 { 84 s = 201; 85 } 86 cv::GaussianBlur(depth, depth, cv::Size(s, s), s, s); 87 } 88 }
-
攝像機(jī)
+關(guān)注
關(guān)注
3文章
1683瀏覽量
60990 -
圖像
+關(guān)注
關(guān)注
2文章
1092瀏覽量
40981 -
OpenCV
+關(guān)注
關(guān)注
32文章
642瀏覽量
42356
原文標(biāo)題:真實(shí)場景的雙目立體匹配(Stereo Matching)獲取深度圖詳解
文章出處:【微信號:vision263com,微信公眾號:新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
智能軟件+硬件解決方案克服實(shí)時(shí)立體視覺中的挑戰(zhàn)

打破室外全域工作“盲區(qū)”!廣和通雙目視覺算法將成就云深處科技機(jī)器狗“慧眼”

奧比中光發(fā)布新一代雙目3D相機(jī)Gemini 435Le
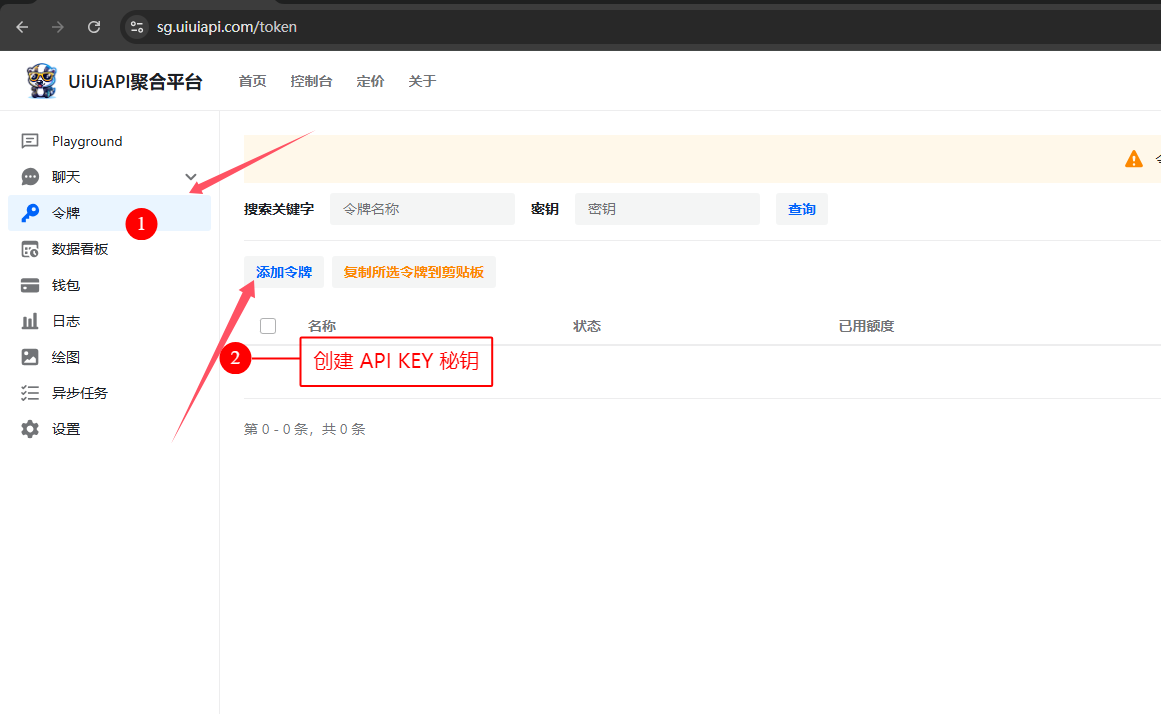
如何獲取 OpenAI API Key?API 獲取與代碼調(diào)用示例 (詳解教程)
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】視覺實(shí)現(xiàn)的基礎(chǔ)算法的應(yīng)用
使用AFG31000系列信號發(fā)生器精準(zhǔn)復(fù)制真實(shí)場景信號

【AIBOX 應(yīng)用案例】單目深度估計(jì)

PTR5415藍(lán)牙模組性能與場景應(yīng)用深度解析
航天宏圖PIE-DEM智能采編系統(tǒng)詳解
Bumblebee X 立體相機(jī)提升工業(yè)自動化中的立體深度感知
立體視覺新手必看:英特爾? 實(shí)感? D421深度相機(jī)模組
可存儲500張人臉的雙目3D人臉識別模塊

深度學(xué)習(xí)模型有哪些應(yīng)用場景
鴻蒙開發(fā)Ability Kit程序訪問控制:使用位置控件






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論