") 航天宏圖PIE-DEM智能采編系統(tǒng)詳解
航天宏圖PIE-DEM智能采編系統(tǒng)詳解
當(dāng)衛(wèi)星鏡頭掠過青藏高原的冰川裂縫,當(dāng)遙感影像捕捉到亞馬遜雨林0.01℃的溫度變化,一場由深度學(xué)習(xí)驅(qū)動的技術(shù)革命正在重塑遙感影像立體匹配技術(shù)獲取高精度DEM/DSM的方式。傳統(tǒng)衛(wèi)星影像匹配技術(shù)面對復(fù)雜地形的無力感,在AI算法的加持下正被徹底改寫。如何在海量數(shù)據(jù)中實現(xiàn)亞像素級精準(zhǔn)匹配,始終是遙感領(lǐng)域的核心挑戰(zhàn)。隨著深度學(xué)習(xí)技術(shù)的突破,航天宏圖PIE-DEM衛(wèi)星影像密集匹配模塊正從“人工設(shè)計”邁向“智能進化”,為地理信息、環(huán)境監(jiān)測、國防安全等領(lǐng)域注入全新動能,為地理信息、環(huán)境監(jiān)測、國防安全等領(lǐng)域注入全新動能。
一、技術(shù)突破
傳統(tǒng)匹配之困:當(dāng)人工設(shè)計遭遇復(fù)雜現(xiàn)實
傳統(tǒng)衛(wèi)星影像密集匹配算法在云層遮擋、植被覆蓋等弱紋理區(qū)域匹配成功率低,算法泛化能力弱。在面對復(fù)雜地物、多源異構(gòu)數(shù)據(jù)、動態(tài)變化監(jiān)測場景時往往力不從心。
深度學(xué)習(xí)破局:從“像素”到“語義”的跨越
基于深度學(xué)習(xí)的密集匹配算法,通過構(gòu)建端到端的神經(jīng)網(wǎng)絡(luò)模型,讓機器自主挖掘影像中的深層特征與空間關(guān)聯(lián),實現(xiàn)了像素級密集匹配。
◆ 多尺度感知:通過卷積神經(jīng)網(wǎng)絡(luò)(CNN)與Transformer結(jié)合,模型可同時捕捉局部細(xì)節(jié)與全局上下文,解決遮擋、重復(fù)紋理等難題;
◆ 并行化計算:基于GPU加速的模型推理,處理速度較傳統(tǒng)方法提升10倍以上,單日可完成百萬平方公里級影像匹配;
◆亞像素級精度:通過可微分亞像素細(xì)化層,匹配精度突破至0.3像素以內(nèi),為高精度DEM/DSM生成奠定基礎(chǔ)。
二、核心優(yōu)勢
訓(xùn)練樣本制作特點
設(shè)計自適應(yīng)動態(tài)匹配策略,局部動態(tài)調(diào)整核線影像切塊位置,自動生成深度學(xué)習(xí)訓(xùn)練樣本。解決了衛(wèi)星影像尺寸大,成像視角差異與地形起伏大造成的,切塊后立體像對視差過大、重疊度較低的問題,另外視差范圍的縮小降低了模型的訓(xùn)練難度,加速模型收斂。
原始遙感影像
左右深度圖樣本
四組標(biāo)準(zhǔn)樣本
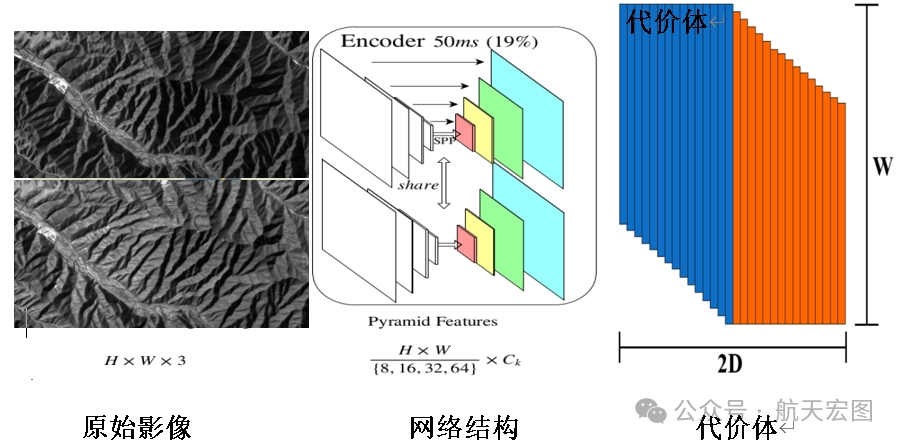
基于AI的衛(wèi)星遙感影像逐像素立體匹配模型算法
模型首先采用U-Net網(wǎng)絡(luò)結(jié)構(gòu)對左右核線影像進行不同尺寸的特征提取,對提取的不同尺寸特征分別構(gòu)建代價體。圖中藍色部分為負(fù)視差,橙色部分為正視差,立方體缺失部分的值設(shè)為0。這種代價體構(gòu)造方式不僅能使網(wǎng)絡(luò)處理正負(fù)視差同時存在的情況,還能從概率的角度對匹配代價進行解釋,增強了網(wǎng)絡(luò)的可解釋性。
基于AI的衛(wèi)星遙感影像逐像素立體匹配模型特點
優(yōu)化HSM算法網(wǎng)絡(luò)結(jié)構(gòu),增加專門用于處理正負(fù)視差數(shù)據(jù)的模塊,添加雙向特征提取模塊,分別提取正負(fù)視差特征,將這些特征融合到主網(wǎng)絡(luò)中。改進損失函數(shù),支持同時處理正負(fù)視差數(shù)據(jù),采用加權(quán)的均方誤差損失函數(shù),對正負(fù)視差數(shù)據(jù)賦予不同的權(quán)重,以平衡它們對模型訓(xùn)練的影響。
改進的HSM算法,支持正負(fù)視差數(shù)據(jù)的處理,顯著提高了衛(wèi)星影像匹配的精度、魯棒性和適用范圍。解決了傳統(tǒng)HSM算法無法處理正負(fù)視差數(shù)據(jù),不能充分利用正負(fù)視差信息進行訓(xùn)練,導(dǎo)致匹配精度受限的問題。
傳統(tǒng)SGM匹配生成深度圖效果
AI生成深度圖效果
基于AI生成的深度圖,計算獲取得到紋理豐富細(xì)膩的點云。
紋理豐富細(xì)膩的點云
基于生成的點云數(shù)據(jù),利用內(nèi)插算法生成數(shù)據(jù)完整、精度可靠的DEM。
數(shù)據(jù)完整、精度可靠的DEM
三、性能飛躍
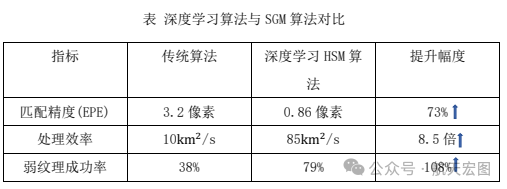
在測試集上對模型進行定量評估,采用的評估指標(biāo)有平均端點誤差(EPE)、均方根誤差(RMSE)、一像素誤差(1PE)和三像素誤差(3PE)。其中 EPE 是指預(yù)測視差與真實視差的平均絕對差值,RMSE 是預(yù)測視差與真實視差的均方根誤差,1PE 或 3PE 分別是預(yù)測視差與真實視差的差值小于 1 或 3 的像素百分比。模型評估結(jié)果如下:EPE為0.86,RMSE為1.53,1PE 為72.6%,3PE為96.1%。與傳統(tǒng)SGM方法相比,深度學(xué)習(xí)方法精度更高。
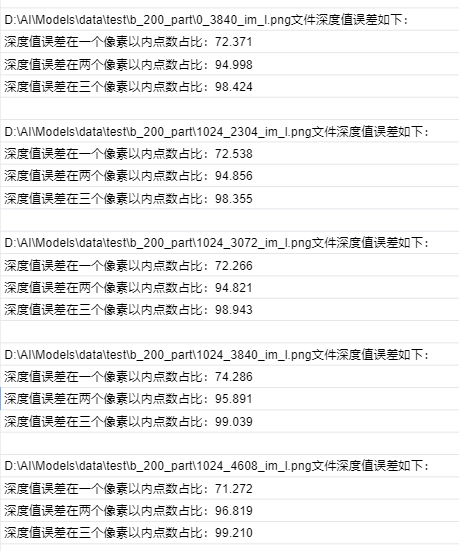
測試數(shù)據(jù)像素誤差評估
四、行業(yè)應(yīng)用
基于深度學(xué)習(xí)的衛(wèi)星遙感影像密集匹配算法,憑借其強大的特征提取與數(shù)據(jù)處理能力,在諸多領(lǐng)域展現(xiàn)出顯著成效,為各行業(yè)發(fā)展注入新動力。
在地形級實景三維建設(shè)領(lǐng)域,依托海量的遙感影像數(shù)據(jù),深度學(xué)習(xí)算法能夠高效且精準(zhǔn)地生成數(shù)字表面模型(DSM)與數(shù)字高程模型(DEM)。通過對不同時期遙感影像的分析處理,可直觀呈現(xiàn)地形地貌的動態(tài)變化,為地質(zhì)災(zāi)害監(jiān)測與防治、大型工程建設(shè)前期的地形評估等提供堅實的數(shù)據(jù)基礎(chǔ)。
地形級DEM
智慧城市建設(shè)同樣離不開深度學(xué)習(xí)與衛(wèi)星遙感影像的深度融合。借助無人機采集的高分辨率影像數(shù)據(jù),運用深度學(xué)習(xí)算法生成高精度 DSM 和 DEM,為城市規(guī)劃、交通建設(shè)、災(zāi)害評估等工作提供極為精準(zhǔn)的數(shù)據(jù)支撐。
智慧城市
結(jié)束語:
當(dāng)深度學(xué)習(xí)遇見衛(wèi)星遙感,這場技術(shù)聯(lián)姻正在重塑人類認(rèn)知地球的維度。從厘米級精度到秒級響應(yīng),從靜態(tài)匹配到動態(tài)監(jiān)測,PIE-DEM系統(tǒng)中的創(chuàng)新算法不僅為遙感行業(yè)帶來效率革命,更在智慧城市、生態(tài)保護、應(yīng)急管理等領(lǐng)域孕育著無限可能。讓我們共同期待,這場由AI驅(qū)動的"遙感革命"如何改寫人類與地球的互動方式。
-
衛(wèi)星
+關(guān)注
關(guān)注
18文章
1755瀏覽量
68152 -
影像
+關(guān)注
關(guān)注
0文章
139瀏覽量
14693 -
航天宏圖
+關(guān)注
關(guān)注
0文章
123瀏覽量
8734
原文標(biāo)題:PIE-DEM智能采編系統(tǒng):衛(wèi)星遙感跨入亞像素級智能匹配時代
文章出處:【微信號:MzA3MjAyNTI5MQ==,微信公眾號:航天宏圖】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論