 技術 | 智能紅外避障自動掃地機器人的設計
技術 | 智能紅外避障自動掃地機器人的設計
研究一種智能掃地機器人,從硬件系統控制模塊設計到主要技術調試進行了較詳細的闡述。以 STM32 單片機為控制核心與電機驅動、紅外線路徑識別模塊等相互協調應用。進行電路搭建和程序編寫。實現了智能掃地機器人紅外線避障和自動掃地功能,其清掃面積能達到約 70%,清掃率約 60%,很大程度受到自身機械機構的限制,后期將對小車的機械結構進行完善。
1 引言
近年來,隨著 AI 技術的突破,核心零部件成本的下降,使越來越多的智能化設備進入人類的家居生活。智能掃地機器人無可厚非是最具代表的服務類機器人,并取得了爆發式的發展。都市繁忙的生活節奏讓最簡單的掃地成為生活累贅,掃地機器人的需求點在于解放繁忙的都市人群,用智能化的方式解放雙手,追求更高品質的生活質量[1-3]。
2 系統結構
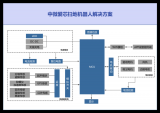
本智能掃地機器人控制系統硬件主要是以單片機 STM32F103 為核心,輔助其外圍各模塊在單片機的控制下,相互協調工作,保證智能掃地機器人各種功能的實現。該智能掃地機器人系統框圖如圖1 所示。
3 智能掃地機器人控制系統的硬件模塊
3.1 STM32F103 單片機
作為智能小車核心控制模塊,輸出 PWM 波以及紅外模塊所需的高、低電平。具備 72 MHz @1.25 MIPS/min 內核,集成 32~51 KB 的 Flash 存儲器;6~64 KB 的 SRAM 存儲器等。其高性能、低功耗、外設豐富,能夠完成本課題所需所有功能。
3.2 紅外避障模塊
傳感器的紅外發射二極管不斷發射紅外線,當發射的紅外線沒有被反射回來或強度不夠大時,光敏三極管處于閉合狀態,此時模塊的輸出端為高電平,指示二極管一直處于熄滅狀態,被檢測物體出現在檢測范圍內時,紅外線被反射回來且強度足夠大,光敏三極管飽和,此時模塊的輸出端為低電平,指示二極管被點亮。紅外發射反射接收原理如圖 2 所示。
本課題采用 4 個紅外漫反射式傳感器的有效距離范圍為 2~30 cm,從小車形態前方從左至右分別編號為探頭 1、探頭 2、探頭 3、探頭 4。
3.3 電機驅動模塊
本模塊采用 L298N 電機驅動板模塊,輸出高低電平給驅動電機,控制電機正轉、反轉或者停止。利用 STM32 單片機輸出 PWM 波原理來控制直流電機的轉動。
4 路徑規劃軟件的設計
開始,標志位置1,前進,兩側傳感器判斷是否有障礙,否,返回前進,是,判斷標志位是否為 0,是,右 S 彎且標志位置 1,返回前進,否,左 S彎 且標志位置 0,返回前進。
掃地機器人按照預定指令完成自動清掃功能。路徑規劃軟件流程圖如圖 3 所示。
5 技術調試及結果分析
5.1 路徑規劃
起點從平面左邊平行位置起,智能掃地機器人直行到達墻壁,當探頭 1 和探頭 4 同時感應到障礙物時小車停止,后退 10 cm,然后右轉 90o,而后直行 17 cm,若探頭 1 感應到障礙物,則右轉 90o 完成調頭,若未檢測到障礙物小車執行避障程序。
同理,直行到達對側墻壁時,左轉完成調頭,路徑成 S 形。自動清掃路徑如圖 4 所示。
因為掃地機器人正面與障礙物接觸面積不同,所以在執行避障時設置了不同的轉向角度。探頭 1 避障程序:探頭 1 檢測到障礙物時,表明當前機器人左側靠近障礙物,右轉 45o 避讓。同理,探頭 4 檢測到障礙物時,左轉 45o 避讓。
探頭 2 避障程序:當探頭 2 最先檢測到障礙物時,表明機器人左側遇到障礙物或家居的突出拐角,此時右轉 60o 避讓。同理,當探頭 3 最先檢測到障礙物時,此時左轉 60o 避讓。
探頭 2、探頭 3 避障程序:探頭 2 個探頭 3 同時遇到障礙物時,表明機器人正面遇到障礙物,此時右轉 90o 避讓。
5.2 模式調試
智能掃地機器人后輪由兩個電機驅動來控制,前方為一個萬向輪,能夠很好地實現左右的移動。小車移動過程中,電機驅動電壓的差異使驅動力大小不同,通過控制小車兩個后輪的速度來控制小車的移動方向。自動清掃模式時,以 S 路徑往返清掃。實驗時劃出一片矩形清掃區域,設置不同初始位置,適當在任意位置放置一些障礙物,觀察其清掃面積的大小。清掃效果如表 1 所示。
經實驗結果分析,根據紅外反射傳感器檢測障礙物的位置,能夠自動避障。智能清潔機器人的清掃面積與初始位置有關,清掃面積較大,但邊角處仍無法清掃到。智能掃地機器人清掃工作狀態如圖 5 所示。
6 結語
本課題完成的智能掃地機器人根據路徑規劃算法控制機器人的運動軌跡,執行時不斷地檢測周圍環境中的障礙物信息,掃地模塊獨立設計。
實測表明機器人能夠實現自動清掃、實時避障、耗時少又節能的目標。在實驗過程中發現依然有需要改進的地方,如使小車行動更加靈敏、清掃更大體積的垃圾、減小電機的噪聲等,使用戶有更好的使用體驗。
-
紅外
+關注
關注
8文章
759瀏覽量
95475 -
掃地機器人
+關注
關注
21文章
810瀏覽量
54375
原文標題:一種智能紅外避障自動掃地機器人的設計
文章出處:【微信號:appic-cn,微信公眾號:集成電路應用雜志】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
鈞敏科技AM2355驅動芯片在掃地機器人中的應用
今日看點丨傳特朗普下令美國EDA制造商停止對華供貨;大疆殺入掃地機器人市場,首款產品預計6月發布
艾為電子助力石頭科技推出兩款掃地機器人產品

智能掃地機器人的工作原理和構成
艾邁斯歐司朗Belago紅外LED,助力Supernode打造避障掃地機器人

掃地機器人應用解決方案
霍爾開關在掃地機器人中的應用
掃地機器人的技術和芯片方案,有哪些創新?
掃地機器人的核心技術突破
掃地機器人避障技術的發展史
隱形清潔大師:灰塵顆粒物壓電傳感器引領掃地機器人新一輪智能清潔革命

供應 英集芯IP2348,適用于掃地機器人解決方案的鋰電池同步降壓充電芯片
光耦知識分享‖探討光耦技術在掃地機器人的應用






 工商網監
工商網監
評論