") 工業(yè)機器人中使用了哪些傳感器?
工業(yè)機器人中使用了哪些傳感器?
2012年,美國提出“工業(yè)互聯(lián)網(wǎng)”,2013年,德國提出“工業(yè)4.0”,2015年,中國提出“中國制造2025”。在工業(yè)物聯(lián)網(wǎng)、AR、云計算等技術(shù)熱潮下,全球眾多優(yōu)秀制造企業(yè)都開始建設(shè)智慧工廠,實現(xiàn)自動化、信息化和智能化的智慧工廠是未來工業(yè)制造的發(fā)展趨勢。那么,什么樣的工廠才能稱做智慧工廠?作為智慧工廠重要組成部分的工業(yè)機器人采用了哪些技術(shù)?
智慧工廠的標配
提到智慧工廠,人們首先想到的是自動化、智能化、工業(yè)機器人、工業(yè)物聯(lián)網(wǎng)等概念,那么,一個智慧工廠的標準配置有哪些?
控制器是智慧工廠的大腦,由程序計數(shù)器、指令寄存器、指令譯碼器、時序產(chǎn)生器和操作控制器組成,它是發(fā)布命令的“決策機構(gòu)”,完成協(xié)調(diào)和指揮整個計算機系統(tǒng)的操作。智慧工廠中常用的控制器有PLC、工控機等。
工業(yè)機器人是自動執(zhí)行工作的機器裝置,它既可以接受人的指揮,又可以運行預(yù)先編排的程序,也可以根據(jù)以人工智能技術(shù)制定的指令行動。
伺服電機是指在伺服系統(tǒng)中控制機械元件運轉(zhuǎn)的發(fā)動機,是自動化工廠提供動力的肌肉。伺服電機轉(zhuǎn)子轉(zhuǎn)速受輸入信號控制,在自動控制系統(tǒng)中用作執(zhí)行元件,可把所收到的電信號轉(zhuǎn)換成電動機軸上的角位移或角速度輸出。
傳感器為智慧工廠提供觸覺,是實現(xiàn)自動檢測和自動控制的首要環(huán)節(jié)。它能感受到被測量的信息,并能將感受到的信息按一定規(guī)律變換成電信號或其他形式的信息輸出。在自動化生產(chǎn)過程中需要用各種傳感器來監(jiān)視和控制各個參數(shù),使設(shè)備工作在正常狀態(tài)或最佳狀態(tài),并使產(chǎn)品達到最好的質(zhì)量。
變頻器是智慧工廠的交換器,由整流(交流變直流)、濾波、逆變(直流變交流)、制動單元、驅(qū)動單元和檢測單元微處理單元組成。它應(yīng)用變頻技術(shù)與微電子技術(shù),通過改變電機工作電源頻率的方式來控制交流電動機。
電磁閥是用電磁控制的工業(yè)設(shè)備,可以配合不同的電路來實現(xiàn)預(yù)期的控制。它屬于執(zhí)行器,是智慧工廠的開關(guān)。
工業(yè)相機是智慧工廠的眼睛,是機器視覺系統(tǒng)關(guān)鍵組件。工業(yè)相機一般安裝在機器流水線上代替人眼來做測量和判斷,通過數(shù)字圖像攝取目標轉(zhuǎn)換成圖像信號,傳送給專用的圖像處理系統(tǒng)。圖像系統(tǒng)對這些信號進行各種運算,抽取目標特征,并根據(jù)判別的結(jié)果來控制現(xiàn)場的設(shè)備動作。
儀器儀表是智慧工廠的調(diào)節(jié)系統(tǒng),用來檢出、測量、觀察并計算各種物理量、物質(zhì)成分和參數(shù)等。比如測量壓力、液位、流量、溫度等一些控制過程所需要的參數(shù)值,就需要相關(guān)的儀器儀表。
自動化軟件是智慧工廠的心臟。例如,SCADA數(shù)據(jù)采集與監(jiān)控系統(tǒng)可以在無人看管的情況下,對生產(chǎn)過程進行調(diào)度和自動化控制。
控制柜是智慧工廠的中樞系統(tǒng)。智慧工廠涉及電氣、變頻、電源、水泵等控制柜,可實現(xiàn)不同的控制功能。
下面將詳細剖析智慧工廠的重要組件——工業(yè)機器人。
工業(yè)機器人涉及哪些技術(shù)?
機器人自動化是一項快速進步的技術(shù),在短短幾十年的時間里,工業(yè)機器人已經(jīng)在全世界范圍內(nèi)變成工廠里普通的裝置。
工業(yè)機器人不僅可以克服惡劣環(huán)境對生產(chǎn)的影響,減少人工的使用,保障工人的安全,還能夠幫助工廠節(jié)約生產(chǎn)成本,提高生產(chǎn)效率,從而保證產(chǎn)品質(zhì)量。
工業(yè)機器人是多自由度的機器裝置,能自動執(zhí)行工作,按照自身動力和控制能力來實現(xiàn)各種功能,由機械部分、傳感部分、控制部分等三大部分組成,這三大部分又分成六個子系統(tǒng)。分別為:
驅(qū)動系統(tǒng):給每個關(guān)節(jié)即每個運動自由度安置傳動裝置,使機器人運動起來。
機械結(jié)構(gòu)系統(tǒng):由機身、手臂、末端操作器三大件組成。每一大件都有若干自由度,構(gòu)成一個多自由度的機械系統(tǒng)。手臂一般由上臂、下臂和手腕組成。末端操作器是直接裝在手腕上的一個重要部件,可以是兩手指或多手指的手爪,也可以是噴漆槍、焊槍等。
傳感系統(tǒng):獲取內(nèi)部和外部環(huán)境狀態(tài)中有意義的信息,提高了機器人的機動性、適應(yīng)性和智能化水準。
機器人-環(huán)境交互系統(tǒng):實現(xiàn)機器人與外部環(huán)境中的設(shè)備相互聯(lián)系和協(xié)調(diào)的系統(tǒng)。
人機交互系統(tǒng):人與機器人進行聯(lián)系和參與機器人控制的裝置。
控制系統(tǒng):根據(jù)機器人的作業(yè)指令程序以及從傳感器反饋回來的信號,支配機器人的執(zhí)行機構(gòu)去完成規(guī)定的運動和功能。
工業(yè)機器人中常用到的傳感器
在工業(yè)自動化領(lǐng)域,機器人需要傳感器提供必要的信息,以正確執(zhí)行相關(guān)的操作。
一份報告預(yù)測,到2021年,全球工業(yè)機器人傳感器市場將以約8%的復(fù)合年增長率(CAGR)穩(wěn)步增長。對于包括消費者和汽車在內(nèi)的機器人傳感應(yīng)用,另一份報告明確指出,到2027年,視覺系統(tǒng)將單獨成就57億美元的市場,力傳感器市場將超過69億美元。
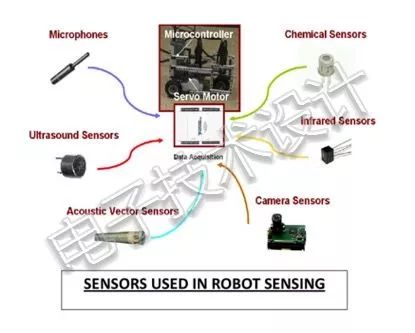
下面列出了工業(yè)機器人中最常用到的傳感器。
二維視覺傳感器
二維視覺是一個可以執(zhí)行從檢測運動物體到傳輸帶上的零件定位等多種任務(wù)的攝像頭。許多智能相機都可以檢測零件并協(xié)助機器人確定零件的位置,機器人可以根據(jù)接收到的信息適當調(diào)整其動作。
三維視覺傳感器
三維視覺系統(tǒng)必須擁有兩個不同角度的攝像機或激光掃描器,用以檢測對象的第三維度。例如,零件取放便是利用三維視覺技術(shù)檢測物體并創(chuàng)建三維圖像,分析并選擇最好的拾取方式。
力/力矩傳感器
如果說視覺傳感器給了機器人眼睛,那么力/力矩傳感器則給機器人帶去了觸覺。機器人利用力/力矩傳感器感知末端執(zhí)行器的力度。多數(shù)情況下,力/力矩傳感器位于機器人和夾具之間,這樣,所有反饋到夾具上的力都在機器人的監(jiān)控之中。
有了力/力矩傳感器,裝配、人工引導(dǎo)、示教、力度限制等應(yīng)用才得以實現(xiàn)。
碰撞檢測傳感器
這種傳感器有各種不同的形式,其主要應(yīng)用是為作業(yè)人員提供一個安全的工作環(huán)境,協(xié)作機器人最需要它們。
一些傳感器可以是某種觸覺識別系統(tǒng),通過柔軟的表面感知壓力,給機器人發(fā)送信號,限制或停止機器人的運動。
一些傳感器還可以直接內(nèi)置在機器人中。有些公司利用加速度計反饋,還有些則使用電流反饋。在這兩種情況下,當機器人感知到異常的力度時,便觸發(fā)緊急停止,從而確保安全。
要想讓工業(yè)機器人與人進行協(xié)作,首先要找出可以保證作業(yè)人員安全的方法。這些傳感器有各種形式,從攝像頭到激光等,目的是告訴機器人周圍的狀況。有些安全系統(tǒng)可以設(shè)置成當有人出現(xiàn)在特定的區(qū)域/空間時,機器人會自動減速運行,如果人員繼續(xù)靠近,機器人則會停止工作。
最簡單的例子是電梯門上的激光安全傳感器。當激光檢測到障礙物時,電梯門會立即停止并退回,以避免碰撞。
其它傳感器
市場上還有很多的傳感器適用于不同的應(yīng)用。例如焊縫追蹤傳感器等。
觸覺傳感器也越來越受歡迎。這類傳感器一般安裝在抓手上,用來檢測和感覺抓取的物體是什么。傳感器通常能夠檢測力度并得出力度分布的情況,從而知道對象的確切位置,讓你可以控制抓取的位置和末端執(zhí)行器的抓取力度。另外還有一些觸覺傳感器可以檢測熱量的變化。
視覺和接近傳感器類似于自動駕駛車輛所需的傳感器,包括攝像頭、紅外線、聲納、超聲波、雷達和激光雷達。某些情況下可以使用多個攝像頭,尤其是立體視覺。將這些傳感器組合起來使用,機器人便可以確定尺寸,識別物體,并確定其距離。
射頻識別(RFID)傳感可以提供識別碼并允許得到許可的機器人獲取其他信息。
麥克風(聲學(xué)傳感器)幫助工業(yè)機器人接收語音命令并識別熟悉環(huán)境中的異常聲音。如果加上壓電傳感器,還可以識別并消除振動引起的噪聲,避免機器人錯誤理解語音命令。先進的算法甚至可以讓機器人了解說話者的情緒。
溫度傳感是機器人自我診斷的一部分,可用于確定其周遭的環(huán)境,避免潛在的有害熱源。
利用化學(xué)、光學(xué)和顏色傳感器,機器人能夠評估、調(diào)整和檢測其環(huán)境中存在的問題。
對于可以走路、跑步甚至跳舞的人形機器人,穩(wěn)定性是一個主要問題。它們需要與智能手機相同類型的傳感器,以便提供機器人的準確位置數(shù)據(jù)。在這些應(yīng)用采用了具有3軸加速度計、3軸陀螺儀和3軸磁力計的9自由度(9DOF)傳感器或慣性測量單元(IMU)。
傳感器是實現(xiàn)軟件智能的關(guān)鍵組件,沒有傳感器,很多復(fù)雜的操作就不能實現(xiàn)。它們不僅實現(xiàn)了復(fù)雜的操作,同時也保證這些操作在進行的過程中得到良好的控制。
工業(yè)機器人避障主要用到哪些傳感器?
移動機器人需要通過傳感器實時獲取周圍的障礙物信息,包括尺寸、形狀和位置信息,來實現(xiàn)避障。避障使用的傳感器有很多種,目前常見的有視覺傳感器、激光傳感器、紅外傳感器、超聲波傳感器等。
超聲波傳感器
超聲波傳感器的基本原理是測量超聲波的飛行時間,通過d=vt/2測量距離,其中d是距離,v是聲速,t是飛行時間。
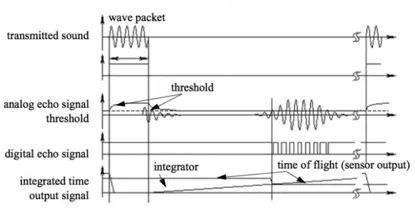
上圖是超聲波傳感器信號的一個示意。通過壓電或靜電變送器產(chǎn)生一個頻率在幾十kHz的超聲波脈沖組成波包,系統(tǒng)檢測高于某閾值的反向聲波,然后使用測量到的飛行時間計算距離。超聲波傳感器一般作用距離較短,普通的有效探測距離幾米,但是會有一個幾十毫米左右的最小探測盲區(qū)。由于超聲傳感器成本低、實現(xiàn)方法簡單、技術(shù)成熟,是移動機器人中常用的傳感器。
紅外傳感器
一般的紅外測距都是采用三角測距的原理。紅外發(fā)射器按照一定角度發(fā)射紅外光束,遇到物體之后,光會反向回來,檢測到反射光之后,通過結(jié)構(gòu)上的幾何三角關(guān)系,就可以計算出物體距離D。
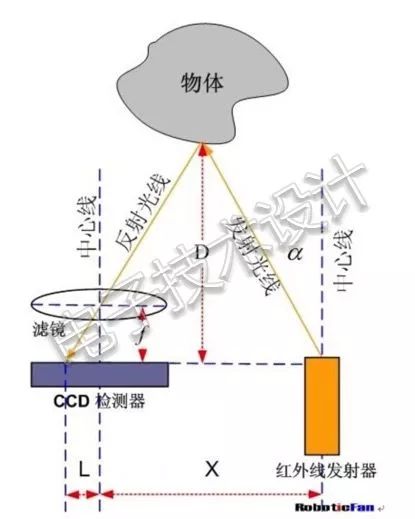
當D的距離足夠近的時候,上圖中L值會相當大,如果超過CCD的探測范圍,雖然物體很近,傳感器反而看不到了。當物體距離D很大時,L值就會很小,測量精度會變差。因此,常見的紅外傳感器的測量距離都比較近,小于超聲波,同時遠距離測量也有最小距離的限制。另外,對于透明的或者近似黑體的物體,紅外傳感器是無法檢測距離的。但相對于超聲來說,紅外傳感器具有更高的帶寬。
激光傳感器
常見的激光雷達是基于飛行時間的(ToF,time of flight),通過測量激光的飛行時間來測距d=ct/2,類似前面提到的超聲測距公式,其中d是距離,c是光速,t是從發(fā)射到接收的時間間隔。
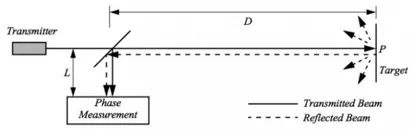
比較簡單的方案是測量反射光的相移,傳感器以已知的頻率發(fā)射一定幅度的調(diào)制光,并測量發(fā)射和反向信號之間的相移,如上圖。
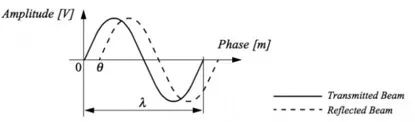
調(diào)制信號的波長為lamda=c/f,其中c是光速,f是調(diào)制頻率,測量到發(fā)射和反射光束之間的相移差theta之后,距離可由lamda*theta/4pi計算得到,如上圖。
視覺傳感器
常用的計算機視覺方案也有很多種, 比如雙目視覺,基于TOF的深度相機,基于結(jié)構(gòu)光的深度相機等。
基于結(jié)構(gòu)光的深度相機發(fā)射出的光會生成相對隨機但又固定的斑點圖樣,光斑打在物體上,因為與攝像頭距離不同,被攝像頭捕捉到的位置也不相同。先計算斑點與標定的標準圖案在不同位置的偏移,利用攝像頭位置、傳感器大小等參數(shù)就可以計算出物體與攝像頭的距離。
雙目視覺的測距本質(zhì)上也是三角測距法,由于兩個攝像頭的位置不同,就像人的兩只眼睛一樣,看到的物體也不一樣。兩個攝像頭看到的同一個點P,在成像的時候會有不同的像素位置,此時通過三角測距就可以測出這個點的距離。
在工業(yè)4.0時代工業(yè)機器人的發(fā)展趨勢
美國機器人產(chǎn)業(yè)協(xié)會(RIA)預(yù)測了工業(yè)機器人的六大發(fā)展趨勢。
工業(yè)物聯(lián)網(wǎng)(IIoT) 技術(shù)的應(yīng)用:機器人會在生產(chǎn)的最前沿應(yīng)用智能傳感器,采集制造商以前無法獲得的數(shù)據(jù)。
優(yōu)先考慮工業(yè)網(wǎng)絡(luò)安全:機器人與內(nèi)部系統(tǒng)的聯(lián)網(wǎng)越來越多,網(wǎng)絡(luò)安全的風險不斷增加。制造商必須解決生產(chǎn)工藝中的缺陷,并在網(wǎng)絡(luò)安全方面加大投資,確保安全、可靠的生產(chǎn)。
大數(shù)據(jù)分析成為競爭優(yōu)勢:機器人將成為工廠車間的主要信息來源之一。制造商必須實施系統(tǒng)來組織和分析采集到的所有數(shù)據(jù),以便采取有效的行動,提升企業(yè)的競爭優(yōu)勢。
實施開放式的自動化架構(gòu):隨著機器人自動化應(yīng)用越來越廣泛,對開放式自動化架構(gòu)的需求相應(yīng)增加。大型的行業(yè)參與者將與行業(yè)機構(gòu)一起制定標準和開放式文檔,機器人集成更加容易,兼容性會變得更好。
虛擬解決方案增加:虛擬解決方案會成為工業(yè)機器人的一個主要部分。
協(xié)作機器人將更受歡迎:協(xié)作機器人可以在人類身邊安全地工作,而且通常比工業(yè)機器人便宜得多。隨著協(xié)作機器人在嚴苛的工業(yè)環(huán)境中變得更有能力,對投資回報率有嚴格要求的制造商會更多地采用協(xié)作機器人。
結(jié)語
“工業(yè)4.0”強調(diào)自動化與信息化相互融合,工業(yè)機器人作為自動化制造過程的重要參與者,直接影響著工業(yè)制造自動化水平。隨著工業(yè)產(chǎn)品工藝復(fù)雜程度和精度的要求不斷提高,機器人的應(yīng)用場所和應(yīng)用需求也越來越復(fù)雜和苛刻,機器人的計算平臺已經(jīng)從傳統(tǒng)的PC平臺、嵌入式平臺擴展到智能手機、平板電腦等移動設(shè)備,機器人配備的傳感器從簡單的光電開關(guān)、觸碰開關(guān)發(fā)展到觸覺、聲覺、視覺等高端傳感器,機器人伺服系統(tǒng)與控制系統(tǒng)之間的通信方式也由原來的“脈沖+方向”的通信線纜,發(fā)展到通信更高效、通信數(shù)據(jù)量更大的各種現(xiàn)場總線。機器人控制系統(tǒng)正朝著開放化的方向轉(zhuǎn)變,工業(yè)物聯(lián)網(wǎng)、大數(shù)據(jù)分析以及虛擬化等技術(shù)的發(fā)展,也使機器人更好地融入制造業(yè)應(yīng)用。
-
傳感器
+關(guān)注
關(guān)注
2563文章
52575瀏覽量
763740 -
工業(yè)機器人
+關(guān)注
關(guān)注
91文章
3446瀏覽量
93734
原文標題:工業(yè)機器人中使用了哪些傳感器?
文章出處:【微信號:robotqy,微信公眾號:機械自動化前沿】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
愛普生XV7001BB角速度傳感器在工業(yè)機器人領(lǐng)域的應(yīng)用

支持PLC、傳感器、工業(yè)機器人、CNC的數(shù)據(jù)采集平臺有哪些功能
伺服電動缸在人形機器人中的應(yīng)用
位移傳感器在機器人中的角色
變速齒輪在機器人中的使用
霍爾元件在掃地機器人中的應(yīng)用
FUTEK傳感器在人形機器人中的應(yīng)用
觸覺傳感器的發(fā)展,對機器人產(chǎn)業(yè)有什么影響?
掃地機器人中的霍爾效應(yīng)傳感器應(yīng)用說明







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論