 視覺傳感器助力機器人“看到”并理解周圍世界
視覺傳感器助力機器人“看到”并理解周圍世界
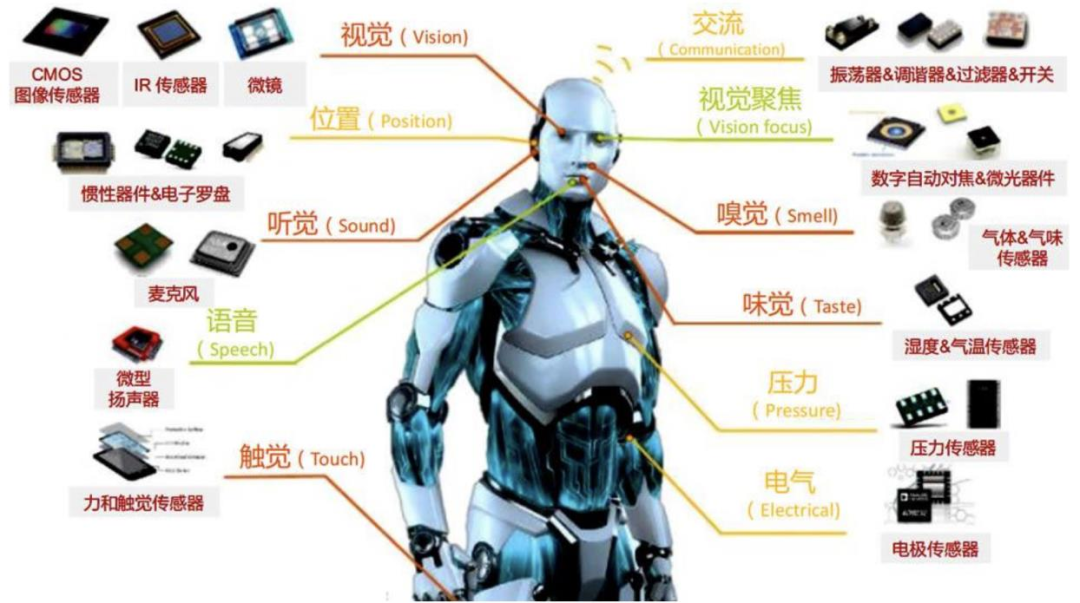
電子發燒友網報道(文/李彎彎)機器人是由計算機控制的復雜機器,它具有類似人的肢體及感官功能;動作程序靈活;有一定程度的智能;在工作時可以不依賴人的操縱。機器人傳感器在機器人的控制中起了非常重要的作用,正因為有了傳感器,機器人才具備了類似人類的知覺功能和反應能力。
機器人需要用到哪些傳感器
機器人要用到的傳感器種類繁多,如視覺傳感器,攝像頭和激光雷達是視覺傳感器的主要形式。它們可以幫助機器人感知周圍的物體、人和環境,廣泛應用于機器人導航、目標識別、人臉識別、三維重建等任務中。
距離傳感器,包括超聲波傳感器和激光測距傳感器等,用于測量機器人與周圍物體之間的距離,常用于障礙物避障、自主駕駛和室內定位等應用中。
接觸傳感器:,能夠檢測機器人與物體之間的接觸或碰撞,以觸發相應的反應。廣泛應用于機器人的安全系統中,例如機器人臂的碰撞檢測和緊急停止。
姿態傳感器,如陀螺儀和加速度計,用于測量機器人的姿態和運動狀態。在機器人的姿態控制、平衡和姿勢估計等任務中發揮重要作用。
環境感知傳感器,包括溫度和濕度傳感器,用于感知環境的溫度和濕度,常用于環境監測、智能家居和農業機器人等應用中。聲音傳感器用于感知和識別聲音,如語音識別、聲源定位和聲音響應等任務。氣體傳感器用于檢測環境中的氣體濃度和成分,常用于環境監測、氣體泄漏檢測、空氣質量監測等領域。
觸覺傳感器,用于感知和測量物體接觸力和變形,如測量物體的壓力、形變、溫度等參數。
廣泛應用于機器人抓取、物體識別、力控制等領域。
位置和位移傳感器,包括位置傳感器、編碼器、傳輸時間測量(磁反射)型位移傳感器等。
它們用于檢測機器人的位置、角度、速度等狀態信息。
除此之外,還有激光傳感器、力矩傳感器、可見光和紅外傳感器等傳感器,它們各自具有特定的功能和應用場景。
機器人視覺傳感器的重要作用
機器人的視覺傳感器是機器人技術中至關重要的一部分,它使機器人能夠獲取并分析周圍環境的視覺信息。視覺傳感器是一種使用視覺信號來獲取有關周圍環境信息的裝置,它模擬人類的視覺系統,通過攝像頭和計算機處理來實現對外部環境的測量、識別和判斷。
視覺傳感器通常由兩個主要組件構成:攝像頭和光學元件。攝像頭負責捕捉外部環境,將其轉化為圖像和視頻信號;光學元件則接收這些信號,進行處理后轉化為電信號,供機器人系統進行分析和判斷。
在機器人視覺傳感器構成中,攝像頭是機器人中最常用的視覺傳感器,能夠拍攝周圍環境的圖像并將其傳輸到機器人的控制中心進行處理。攝像頭分為黑白和彩色兩種,常用的有CMOS和CCD兩種傳感器。CMOS傳感器具有低功耗、低噪聲等優勢,而CCD傳感器則在圖像質量上有所突出。常用的攝像頭有USB攝像頭、MIPI攝像頭等。
激光雷達能夠掃描周圍環境并獲取環境中物體的距離和位置等信息。激光雷達工作時會向周圍發射一束光,并通過測量光的反射時間等參數來計算物體與激光雷達的距離。在機器人中,激光雷達主要應用于SLAM(Simultaneous Localization and Mapping)算法、障礙物避障等方面。
紅外線傳感器能夠感知周圍環境中的紅外線信號并將其轉化為數字信號輸出。機器人中常用的紅外線傳感器有側重于測量距離的紅外線傳感器、側重于檢測物體溫度的紅外線傳感器等。在機器人中,紅外線傳感器主要應用于室內導航、目標識別、人體檢測等方面。
總的而言,機器人的視覺傳感器是機器人感知外部環境的重要工具,它通過攝像頭和計算機處理來實現對圖像的采集、傳輸、處理、存儲與理解,使機器人能夠像人類一樣“看到”并理解周圍環境。隨著技術的不斷發展,視覺傳感器也會在機器人領域發揮越來越重要的作用。
寫在最后
可以看到,機器人是一個復雜的機器,需要用到多種類的傳感器,每種傳感器都有其獨特的功能和應用場景。這些傳感器共同構成了機器人的感知系統,使機器人能夠感知和理解外部環境,從而做出決策和執行任務。
機器人視覺傳感器則是通過攝像頭、激光雷達和紅外線傳感器等組件,結合光學處理和圖像處理技術,實現對周圍環境的感知和識別,為機器人的智能化應用提供了重要支持。
-
傳感器
+關注
關注
2562文章
52524瀏覽量
763461 -
機器人
+關注
關注
213文章
29463瀏覽量
211463 -
視覺傳感器
+關注
關注
3文章
261瀏覽量
23212
發布評論請先 登錄
人形機器人感知革命!創新形態機器視覺傳感器涌現

詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】+兩本互為支持的書
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
這批中國企業,在做人形機器人觸覺傳感器
一文講透人形機器人常用的四類感知傳感器:視覺、力/力矩、觸覺、IMU
解鎖機器人視覺與人工智能的潛力,從“盲人機器”改造成有視覺能力的機器人(上)


機器人視覺與計算機視覺的區別與聯系
解讀工業機器人避障常用的視覺傳感器、激光傳感器、紅外傳感器、超聲波傳感器






 工商網監
工商網監
評論