 史上成本最低、可DIY的機器狗
史上成本最低、可DIY的機器狗

史上成本最低,斯坦福開發機器狗,旋轉跳躍后空翻,成本僅3000美元。這個命名為Stanford Doggo的機器人已經在網上免費公開的綜合計劃,代碼和供應清單,任何人都可以在線上購買幾乎所有組件。
斯坦福大學學生機器人俱樂部的“Extreme Mobility”團隊開發了一種四足機器人Doggo,可以執行一些復雜的技巧,以及穿越具有挑戰性的地形。
最重要的是,其設計具有可復用性,并且所有的文檔均已開源,有能力的同學可以使用成本低廉的原料、按照設計文檔DIY一臺四足機器人。文末我們會附上所有相關資源鏈接。
團隊在今年的ICRA會議中發表了用機器人實現后空翻的論文。下載地址:
https://arxiv.org/pdf/1905.04254.pdf
造一臺Doggo成本不到2萬元
斯坦福大學的學生開發了Stanford Doggo,這是一種相對低成本的四足機器人,可以小跑,跳躍和翻轉。
當然,這些其實是現代四足機器人的標配了。比如波士頓動力、Laikago、浙大的絕影、MIT的小狗等,都可以輕松實現。
不過Doggo最大的特點就是開源、便宜(相對而言)。幾乎所有組件都可以在網上買到,開發團隊預估Doggo的成本將會低于3000美元,相當于人民幣2萬多一點,不到一輛本田CBR400R摩托售價的一半,這其中還包括了制造和運輸成本。相比而言,號稱首款可商用的四足機器人Laikago,售價約20000-30000美元。
整個機器人設計中最痛苦的部分:同軸機制
驅動每條腿的同軸機構絕對是機器人中最復雜的機械部件,也是最麻煩的。
Doggo有四個v3.5、48V ODrives,每條腿兩個,安裝在碳纖維側板上。中間的2mm碳纖維板上,有一個Teensy 3.5,一個Sparkfun BNO080 IMU和一個5mW的Xbee。
Teensy通過四條獨立的UART線與ODrives對話,每條線路的工作頻率為500000波特。在這個板塊下面,有配電板和一個Gigavac P105 Mini-Tactor繼電器,所以可以使用一個外接的ESTOP開關來關閉機器人電源。Doggo還有兩個1000mah 6s Tattu鋰電池。
它的工作方式是在碳纖維側板上安裝了兩個TMotor MN5212電機。這些電機每秒重復計算8000次,通過感應機器人外力的電機幫助確定每條腿應該施加多大的力和扭矩。
團隊還加了一個3D打印軸承座,有兩個軸承來固定外同軸管。如下圖所示:
兩個電機通過16T皮帶輪和48T皮帶輪之間的GT2皮帶將動力傳遞給同軸軸,沒根皮帶6mm寬,間距3mm間距。
由于預算有限,團隊并沒有使用現成滑輪,而是使用Xometry SLS服務自己打印出來的。不過一定要明確的調整Xometry SLS服務,如果部件以一定角度打印,則由于偏角層,滑輪齒的幾何形狀會變形。
在滑輪上方有一個水刀鋁支架以保持皮帶張力,防止在高扭矩情況下跳脫。接下來,找到支架的最佳中心距離是一件非常痛苦的事情。因為電機和小滑輪之間連接處的斜坡,以及較大滑輪和軸之間連接處的斜坡,意味著頂部支架的中心距離必須比皮帶供應商規定的標稱中心距離(SDP-SI)大0.5mm。
這種裝配的最大問題是皮帶張力越高,摩擦阻力就越大。較高的摩擦意味著電動機的跟蹤性能變差,并且對觸摸事件等敏感性減弱。團隊正在積極的研究在同軸組件中具有更平滑、更精確的機械加工滑輪和更少的傾斜。
關鍵部件
Doggo有四條SCARA風格的2DOF腿。SCARA風格的意思是每條腿有五條連桿,并且兩條上連桿是同軸驅動的。
實際的腿部連接是Big Blue Saw的水刀切割,這是一個很棒的在線服務,水射流部件已經足夠精確,不需要為軸承鉆孔。
對于每個關節,在連桿上有兩個彼此相鄰堆疊的深溝球軸承,并且肩螺栓穿過它們并擰入相對的連桿。
而機器人的支腳是使用3D打印的兩部分模具制作的硅膠片。
控制軟件
Doggo軟件也相對比較簡單。只要實現有一個狀態機器在不同的行為之間翻轉(如小跑,跳躍等)即可。
對于每個行為,向四個ODrive發送不同的位置命令和增益。還有一些輔助線程例如一個用于IMU測量、一個用于記錄來自ODrives的遙測,另一個用于通過Xbee進行命令等。
機器人通過向四個ODrive驅動器指揮不同的正弦開環軌跡來行走、小跑、繞圈等。腿部軌跡由兩個半正弦曲線組成,下圖中以橙色和紫色顯示。
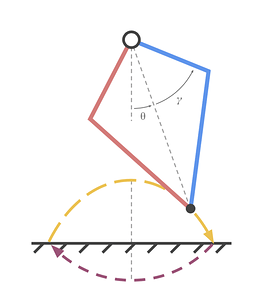
通過改變正弦曲線的幾何參數、虛擬腿部順應性以及腿部穿過每個正弦曲線段的持續時間以產生不同的步態。
如果你也想嘗試按照設計圖自己制造一臺Doggo,需要注意一點,那就是團隊開發了一個自定義二進制UART協議來發送和接收數據。協議具體內容參閱:
https://github.com/Nate711/Doggo/blob/master/lib/ODriveArduino/ODriveArduino.cpp
Stanford Doggo進一步的計劃
“Extreme Mobility”團隊領隊Patrick Slade說:“我們希望提供一個任何人都可以建立的基線系統,比如說你想從事搜索和救援工作,就可以給Doggo裝上傳感器然后在對現有的代碼進行修改,可以讓它爬上巖石堆或進洞穴挖掘,或者拿東西等等。”
Extreme Mobility與斯坦福大學航空航天助理教授Zachary Manchester的機器人探索實驗室合作,在第二個Stanford Doggo上測試新的控制系統。
該團隊還完成了一個比Stanford Doggo大一倍的機器人,可以攜帶大約6公斤的設備。它的名字是Stanford Woofer。
-
四足機器人
+關注
關注
1文章
94瀏覽量
15474 -
機器狗
+關注
關注
3文章
177瀏覽量
10524
原文標題:能跑會跳后空翻!斯坦福開源四足機器人,DIY一臺成本僅2萬
文章出處:【微信號:AI_era,微信公眾號:新智元】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
機器人看點:越疆機器人正式發布六足仿生機器狗 智元公布機器人運動控制模型專利
TPS3430 具有可編程復位延遲的窗口看門狗定時器數據手冊
TPS3430-Q1 具有可編程復位延遲的汽車級窗口看門狗定時器數據手冊

Unitree B2-W機器狗展現新技能:晶振在四足機器人中的關鍵作用

樹莓派遇上機器狗:科技界的“春晚明星”是怎樣煉成的?

看門狗,你真的會用嗎?

Meta啟動史上最大海底電纜項目
安利給工程師!看門狗相關知識

抄作業!看門狗定時器必備知識
特朗普啟用帶激光雷達機器狗巡邏
舵機技術新紀元:解鎖DIY項目的無限可能
單片機開發:使用內部看門狗定時器(WDT)還是外掛看門狗芯片?
采用低成本MSP430單片機的外部可編程看門狗定時器監控系統






 工商網監
工商網監
評論