") 激光雷達vs純計算機視覺 自動駕駛的兩大流派
激光雷達vs純計算機視覺 自動駕駛的兩大流派
激光雷達流派和純計算機視覺流派一直在自動駕駛技術(shù)中的感知層解決方案上喋喋不休。激光雷達派認為純視覺算法在數(shù)據(jù)形式和精度上的不足;純視覺流派則認為激光雷達不必要且過于昂貴。本文將對激光雷達、攝像頭以及毫米波雷達等主流傳感器、各自動駕駛公司的解決方案以及傳感器市場格局作介紹。
特斯拉CEO馬斯克近日在“自動駕駛?cè)铡蓖瞥隽巳詣玉{駛計算機”(full self-driving computer),即之前所說的Autopilot硬件3.0。
與上一代由英偉達芯片驅(qū)動的Autopilot相比,新硬件每秒幀數(shù)處理能力提高了21倍,且相比Autopilot 2.5版本,每輛車的硬件成本降低約20%。
與其他自動駕駛公司不同的是,特斯拉的Autopilot一直是感知層中視覺主導(dǎo)方案的擁簇,另一種方案的主導(dǎo)則是激光雷達(Lidar),代表是除特斯拉外的絕大多數(shù)公司。
實際上,激光雷達流派和純計算機視覺流派一直在自動駕駛技術(shù)中的感知層解決方案上喋喋不休。一個被激光雷達派接受的觀點是,考慮到純視覺算法在數(shù)據(jù)形式和精度上的不足,L3 級以上的自動駕駛乘用車必須要采用激光雷達。
特斯拉FSD的發(fā)布意味著其純視覺方案也可更進一步,甚至有可能率先達到“機器開車人輔助”甚至“機器開車”的L3、L4級別自動駕駛。
那這兩大流派究竟?fàn)幍檬鞘裁茨兀渴紫刃枰f明自動駕駛技術(shù)的基本原理。
自動駕駛技術(shù)基本原理是:感知層的各類硬件傳感器捕捉車輛的位置信息以及外部環(huán)境信息。決策層的大腦基于感知層輸入的信息進行環(huán)境建模,形成對全局的理解并作出決策判斷,發(fā)出車輛執(zhí)行的信號指令。最后執(zhí)行層將決策層的信號轉(zhuǎn)換為汽車的動作行為。
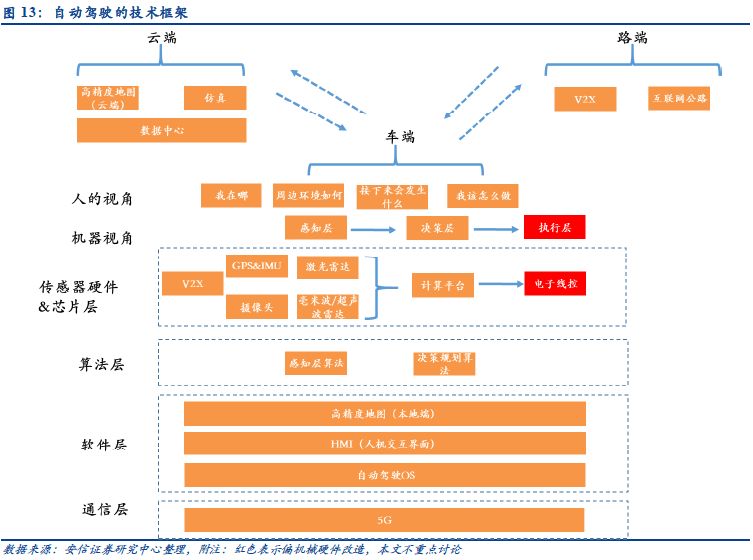
也就是說,上述的激光雷達方案和純視覺方案都是自動駕駛車輛對外界環(huán)境感知的一種方式,但感知的主導(dǎo)不同。視覺主導(dǎo)方案以攝像頭為主導(dǎo),配合毫米波雷達、超聲波雷達、低成本激光雷達;激光雷達主導(dǎo)方案以激光雷達為主導(dǎo),配合毫米波雷達、超聲波傳感器、攝像頭。也有人認為還有第三種方案,即兩者都是主導(dǎo)。
需要注意的是,特斯拉在視覺主導(dǎo)方案中顯得更為極端,它甚至完全棄用了激光雷達。馬斯克甚至揚言,“傻子才用激光雷達,現(xiàn)在誰要還是靠激光雷達,那就要完蛋(doomed),注定完蛋!”
激光雷達和攝像頭的技術(shù)原理
激光雷達顧名思義,其工作原理是利用激光進行探測和測距技術(shù),通常位于汽車頂部,可以360度監(jiān)測。在其內(nèi)部,每一組組件都包含一個發(fā)射單元與接收單元。
探測距離的原理是基于光返回的時間,激光二極管發(fā)出脈沖光,脈沖光照射到目標(biāo)物后反射一部分光回來,在二極管附近安裝一個光子探測器,它可以探測出返回來的信號,通過計算發(fā)射和探測的時間差就可以計算出目標(biāo)物的距離。
脈沖距離測量系統(tǒng)一旦被激活就能收集到大量的點云。如果點云中有目標(biāo)物,目標(biāo)物就會在點云中呈現(xiàn)出一個陰影。通過這個陰影可以測量出目標(biāo)物的距離和大小。通過點云可以生成周圍環(huán)境的三維模型。點云密度越高,圖像越清晰。
總體而言,我們可以認為激光雷達最重要的兩個屬性是測距和精度。與攝像頭不同的是,它是“主動視覺”。激光雷達可以主動探測周圍環(huán)境,即使在夜間仍能準(zhǔn)確地檢測障礙物。因為激光光束更加聚攏,所以比毫米波雷達擁有更高的探測精度。

相比之下,攝像頭的工作原理很容易理解,就像人眼那樣,物體反射的光通過鏡片在傳感器上成像。它沒有激光雷達那用強大的測距能力,且受環(huán)境光照的影響很大;但攝像頭有一個極大的優(yōu)勢,在于人眼就能看懂?dāng)z像頭拍攝的內(nèi)容,使其非常適用于物體分類。
特斯拉人工智能和自動駕駛視覺總監(jiān) Andrej Karpathy就表示,世界是為視覺識別而構(gòu)建的,激光雷達很難分辨塑料袋和輪胎的區(qū)別。“某種意義上,Lidar(激光雷達) 是一個捷徑。它回避了對自動駕駛非常重要的視覺識別基本問題,給人一種虛假的技術(shù)進步了的感覺”。
此外,較為主流的傳感器還包括雷達(Radar),又可分為毫米波雷達和超聲波雷達。前者的特點是探測距離最遠,可超200米,同時不受天氣情況和夜間影響,其幾乎是自動駕駛系統(tǒng)的標(biāo)配;后者的探測距離最小,負責(zé)3米以內(nèi)的近距離監(jiān)測,用于盲區(qū)探測,變道、泊車輔助等。
兩大流派究竟?fàn)幍氖鞘裁矗?/p>
激光雷達、攝像頭、雷達等不同傳感器側(cè)重點不盡相同。實際上,早期的自動駕駛公司感知以激光雷達為中心,如今大多以多傳感器融合為主,也有少數(shù)公司以計算機視覺為主。

我們以當(dāng)前自動駕駛水平最高的Waymo為例,其搭載了攝像頭、毫米波雷達、激光雷達、音頻探測系統(tǒng)等傳感器。
Waymo的視覺系統(tǒng)由幾組高分辨率的相機組成,設(shè)計用于在長距離、日光和低光照條件下工作;毫米波雷達則使用波長來感知物體和運動,能夠在白天、黑夜、雨雪天氣中有效工作;激光雷達則用于360度的測距。
然而,只有特斯拉完全不使用激光雷達。相對于激光雷達的超強的探測能力,首先需要說明其一個顯著缺點,即成本,據(jù)中信建投報告,Lidar成本高于2萬,而攝像頭最多僅2000,雷達則更便宜。這與現(xiàn)階段Lidar技術(shù)還不夠成熟有關(guān),也導(dǎo)致設(shè)備影響整車的外型。
不過,近日外媒報道稱蘋果正與至少四家公司談判,希望能夠?qū)ふ业奖犬?dāng)前更小、更便宜、更容易批量生產(chǎn)的自動駕駛汽車的下一代Lidar傳感器;也有知情人士表示蘋果可能正在自主研發(fā)Lidar傳感器。
特斯拉CEO馬斯克則曾解釋過棄用激光雷達的技術(shù)原因,在與視覺相結(jié)合上,馬斯克認為一些公司會用錯誤的波長來做主動質(zhì)子發(fā)生系統(tǒng),他稱4mm的波長是合適的,而400 nm - 700 nm 的范圍內(nèi)的主動質(zhì)子發(fā)生器很愚蠢。
這是馬斯克與當(dāng)前整個行業(yè)的分歧。但進一步而言,以攝像頭作為傳感器的主導(dǎo)實際上得到了行業(yè)的認可。在所有傳感器中,攝像頭擁有最豐富的線性密度,其數(shù)據(jù)量遠超其他類型的傳感器。基于圖像信息密度最高的優(yōu)勢,使得它處于整個感知融合的中心地位。
問題在于,現(xiàn)有的無人駕駛公司認為,視覺潛力巨大,激光雷達也許有一天會退出歷史舞臺,但今天的計算機視覺和 AI 發(fā)展發(fā)展成熟度絕無可能獨立完成感知。而馬斯克則認為激光雷達的加入會讓技術(shù)路線誤入歧途,所有人的終極目標(biāo)都是攝像頭實現(xiàn)感知。
特斯拉與其純視覺流派
如上所述,特斯拉不使用激光雷達的底氣在哪里呢?
首先需要說明其自動駕駛系統(tǒng)的配置。特斯拉Autopilot的感知工作主要依賴3個前置攝像頭、2個側(cè)方前視攝像頭、2個側(cè)方后視攝像頭、1個后視攝像頭、12個超聲波傳感器、1個毫米波前置雷達。
車輛可以通過這8個攝像頭360度檢測周圍環(huán)境,雷達則負責(zé)探測前方障礙物的距離及行進速度,且不受天氣影響;這幾乎在功能上取代了激光雷達傳感器,同時降低了自動化系統(tǒng)的成本。
更為重要的是特斯拉的神經(jīng)網(wǎng)絡(luò)圖像識別算法,基于其自研的計算機芯片以及大量配套的軟件算法。實際上,特斯拉的每一位司機其實都參與到了神經(jīng)網(wǎng)絡(luò)的訓(xùn)練中,每一個新手都將為特斯拉的自動駕駛系統(tǒng)喂入新的數(shù)據(jù)。
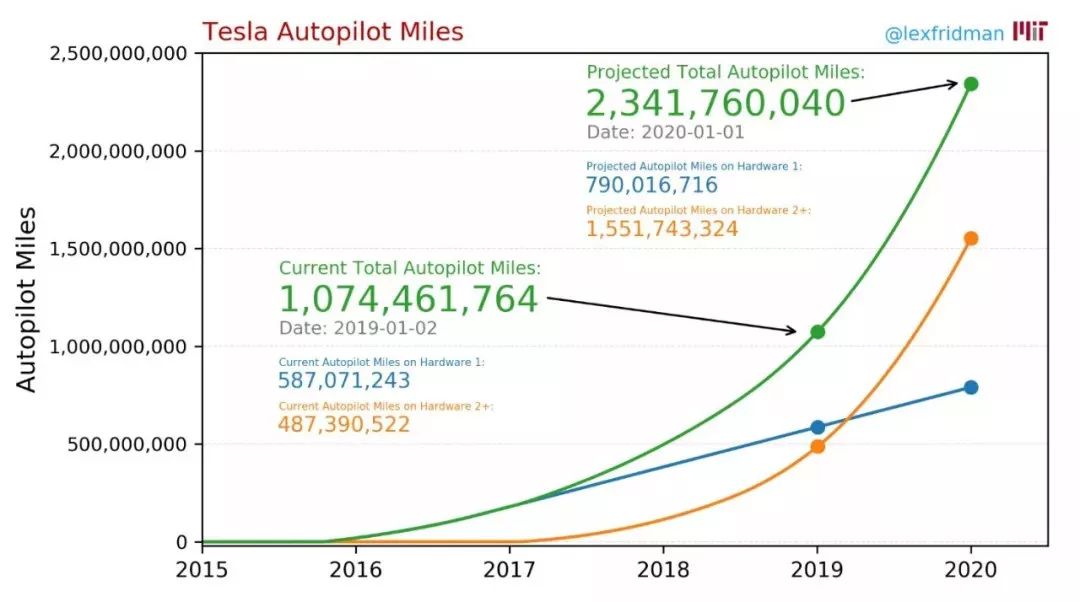
MIT 按照特斯拉公布的交付量、特斯拉汽車平均行駛里程和 AP 啟動狀態(tài)下行駛里程計算,到 2019 年,特斯拉累計路測數(shù)據(jù)已經(jīng)達到 4.8 億英里,到 2020 年(估算)將突破 15 億英里。按照 Elon 的說法,特斯拉路測數(shù)據(jù)占全行業(yè)總路測數(shù)據(jù)的 99%。
Andrej Karpathy指出,特斯拉的 AI 軟件能夠處理來自視覺傳感器收集到的車道線、交通、行人等信息,將這些信號與已知的物體進行匹配再最終作出決策。
同時,在數(shù)據(jù)的標(biāo)注上,特斯拉也正在嘗試本地自動化標(biāo)注提高識別率。只有出現(xiàn)攝像頭完全無法理解或引起混亂的圖像,才會上傳到云端,由工程師進行標(biāo)注,導(dǎo)入神經(jīng)網(wǎng)絡(luò)進行訓(xùn)練,直到神經(jīng)網(wǎng)絡(luò)掌握對該場景的識別。
此外,全球各地不同國家有著完全不同的路況、交規(guī)、暴雨、冰雹、大霧、甚至洪水、火災(zāi)、火山等罕見的長尾場景。每一次 AP 啟用狀態(tài)下的人為介入接管,系統(tǒng)都會記錄下該場景的信息和數(shù)據(jù),并自行學(xué)習(xí)人類的決策和駕駛行為。
傳感器的市場空間
最后需要說明當(dāng)前產(chǎn)業(yè)中攝像頭、激光雷達、雷達的市場格局。
攝像頭方面,車載攝像頭的壁壘主要在于模組封裝和客戶壁壘,目前來看,國際上松下、索尼等占據(jù)了較大的市場份額,但是總體的競爭格局并不是很集中,除了松下占據(jù)了20%的市場份額以外,其后的8名主要競爭對手市場份額相互差距都不大,國內(nèi)舜宇光學(xué)、歐菲光、德賽西威等已開始全面進入車載攝像頭模組封裝制造中。
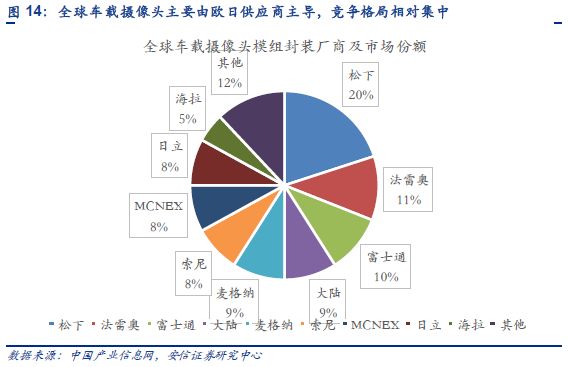
當(dāng)前外資供應(yīng)商占據(jù)主流地位,未來,隨著自主供應(yīng)商技術(shù)不斷成熟,規(guī)模日漸擴大,憑借著快速響應(yīng)和性價比的傳統(tǒng)優(yōu)勢,將有望開啟對外資供應(yīng)商的替代。
毫米波雷達方面,全球市場基本被以博世為首的外資汽車零部件巨頭壟斷,其中博世以77GHz毫米波雷達為主。
據(jù)OFweek的統(tǒng)計數(shù)據(jù)顯示,目前中國24GHz車載雷達市場主要由法雷奧、海拉和博世等主導(dǎo),合計出貨量占比高達60%以上。中國77GHz車載雷達主要由大陸集團、博世和德爾福等主導(dǎo),合計出貨量占比高達80%以上。綜合來看,中國市場當(dāng)前仍在外資寡頭的壟斷之下。
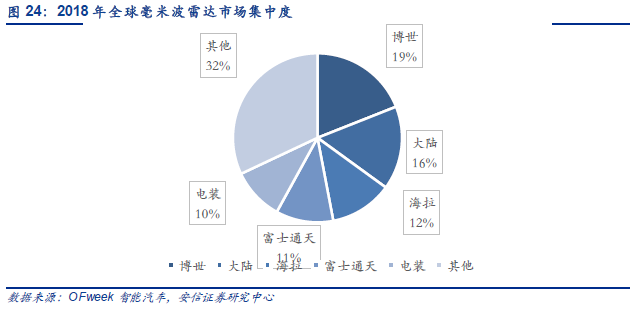
國內(nèi)的毫米波雷達市場當(dāng)前被大陸、德爾福、博世等國外零部件巨頭壟斷,并且也在不斷推出更新更好的產(chǎn)品。安信證券稱,當(dāng)單品性能和價格不足以和國外供應(yīng)商拉開差距,打包做解決方案是比較好的突圍路徑,包括整個系統(tǒng)有多少冗余,提供定制化服務(wù)。
激光雷達雖然在汽車領(lǐng)域是還不夠成熟的技術(shù),但在軍事、氣象等領(lǐng)域早有廣泛應(yīng)用,然而需求并不大。隨著當(dāng)前對L3級別自動駕駛的需求,激光雷達或開始滲透進消費領(lǐng)域。
對激光雷達廠商而言,需要追求的廠商追求仍是在保證基本性能的情況下,盡可能降低成本。只有這樣才能真正進入消費級市場。
-
雷達
+關(guān)注
關(guān)注
50文章
3070瀏覽量
119335 -
自動駕駛
+關(guān)注
關(guān)注
788文章
14182瀏覽量
169367
原文標(biāo)題:分析 | 激光雷達vs純計算機視覺 自動駕駛的兩大流派
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
激光雷達在自動駕駛領(lǐng)域中的優(yōu)勢

激光雷達在自動駕駛中為何不可替代?

愛普生高精度車規(guī)晶振助力激光雷達自動駕駛

自動駕駛中的激光雷達是否會傷害人眼?
激光雷達技術(shù):自動駕駛的應(yīng)用與發(fā)展趨勢

激光雷達是自動駕駛走的一段彎路嗎?
禾賽激光雷達助力寶馬智能工廠自動駕駛
激光雷達光電組件的AEC-Q102認證:保障自動駕駛硬件的可靠性與品質(zhì)
馬斯克重申:純視覺是自動駕駛的未來
毫米波雷達與激光雷達比較 毫米波雷達在自動駕駛中的作用
激光雷達在自動駕駛中的應(yīng)用
激光雷達與純視覺方案,哪個才是自動駕駛最優(yōu)選?
物聯(lián)網(wǎng)系統(tǒng)中的自動駕駛的“眼睛”_純固態(tài)激光雷達






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論