") 多體動力學平衡狀態(tài)分析方法介紹
多體動力學平衡狀態(tài)分析方法介紹
在多體動力學模型仿真之前,一般需要把模型設置為平衡狀態(tài),原因主要有:
如果模型不是平衡狀態(tài),仿真開始后受到重力作用,模型中的部件會發(fā)生明顯的波動,使仿真前幾秒甚至更長時間的數(shù)據(jù)振蕩比較大,不是真實的數(shù)據(jù),沒有價值;
非平衡狀態(tài)的模型產(chǎn)生非常大的振蕩會使求解器解算困難,甚至產(chǎn)生報錯,仿真停止;
實際物理模型是平衡狀態(tài)的(一直受重力作用),非平衡狀態(tài)的仿真模型不符合實際的物理模型狀態(tài)。
基于上述原因,需要在多體動力學模型的時域分析之前把模型處于平衡狀態(tài)。注意:多體仿真模型進行頻域分析之前也需要進行平衡分析,因為頻域分析是在平衡位置上進行線性化。
Simpack作為專家級多體動力學仿真分析軟件,提供多種分析方法使模型達到平衡狀態(tài)。下面以示例模型為例,介紹具體方法。
1.靜平衡分析
多體動力學平衡分析最常用的方法是靜平衡分析,Simpack同樣提供靜平衡分析方法。
在平臺模型中,一個剛體部件四個角使用彈簧安裝在地面上,同時受到一個力的作用使該部件受力不平衡。

在此原始狀態(tài)下進行時域分析,如下圖所示。
點擊在線平衡分析按鈕
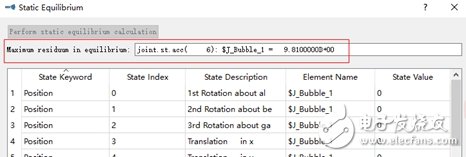
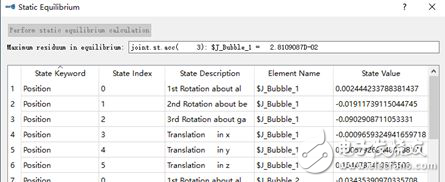
,進行靜平衡分析,得到靜平衡分析結果,如下圖所示。
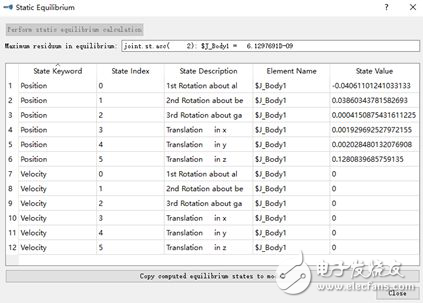
可以看到當前模型狀態(tài)的最大殘余加速度值非常小。如果Maximum residuum in equilibrium參數(shù)的數(shù)值比較大(有明顯的加速度),說明模型沒有處于平衡狀態(tài),需要繼續(xù)分析。
點擊“Copy computedequilibrium states to model”按鈕把計算后的狀態(tài)復制到當前模型中,這樣模型就處于平衡狀態(tài)。
如果使模型在原始狀態(tài)和平衡狀態(tài)相互切換,最好的辦法是使用狀態(tài)集。點擊狀態(tài)集按鈕
,這樣就把當前模型的狀態(tài)保存到這個新建的狀態(tài)集中。
創(chuàng)建兩個狀態(tài)集,分別保存模型的初始狀態(tài)和平衡后的狀態(tài)。這樣,該平臺模型就可以在原始不平衡狀態(tài)和平衡狀態(tài)之間實現(xiàn)快速相互切換。
2.預載荷(Preload)分析
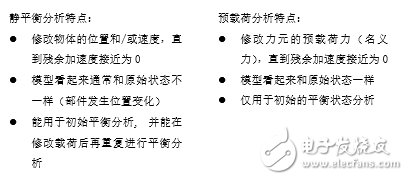
觀察部件的位置可以發(fā)現(xiàn)通過靜平衡分析后模型中的部件位置相比原始位置有了明顯的變化,這在某些仿真工況中存在一定的問題。
比如,建立汽車(或者機車)仿真模型,其部件位置是基于實際物理樣機的部件位置進行建模的,實際物理樣機的部件位置已經(jīng)是平衡狀態(tài)。仿真模型中的部件初始位置和實際物理樣機部件位置相同,但進行平衡分析后,模型中的部件發(fā)生位移,和實際部件位置之間產(chǎn)生一定的位置偏差,導致仿真模型與實際不符。
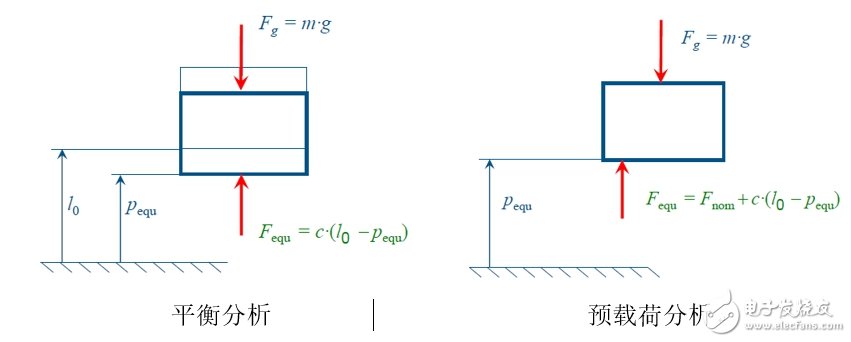
為了解決這個問題,可以使用Simpack預載荷(Preload)分析功能。預載荷分析是通過修改力元的名義力,使其和部件的重力平衡達到平衡狀態(tài)。下面是預載荷分析和平衡分析之間的對比。
把這個平臺模型恢復到初始非平衡狀態(tài),點擊預載荷分析按鈕
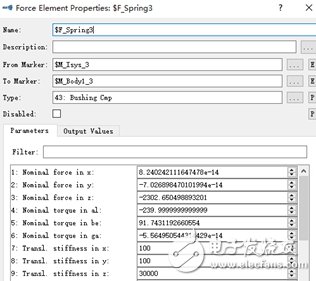
,并在Preload對話框中設置需要計算力元的哪些方向數(shù)值(本例是全部方向),并點擊Perform Preload calculation按鈕進行計算,計算后的結果為下圖所示,可以看出四個彈簧力元的6分量力都有了名義力。
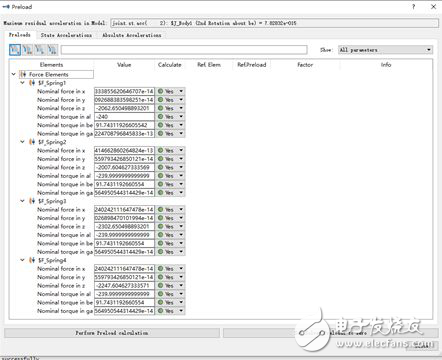
關閉該對話框,并在模型中打開一個力元的屬性對話框,發(fā)現(xiàn)計算后的力數(shù)值已經(jīng)賦予到力元中。
對模型進行在線時域分析,發(fā)現(xiàn)部件沒有產(chǎn)生運動。
如果要把預載荷分析后的模型恢復為原始狀態(tài),可以點擊Preload對話框中的Set Solver Preloads to zero按鈕即可實現(xiàn)。
3.高級靜平衡分析
上述的靜平衡分析和預載荷對于一般的模型都能處理,但是對于一些復雜模型或者含有接觸的模型,那么這兩種方法就不一定能使模型達到靜平衡狀態(tài)。
例如,三個小球與漏斗部件接觸且小球之間也相互接觸,在重力作用下下落,相互之間產(chǎn)生接觸碰撞。
為這個模型中沒有可計算名義力的力元,所以不能使用預載荷分析。對這個模型進行靜平衡分析,得到的殘余加速度為9.81,即重力加速度,說明模型沒有處于平衡狀態(tài)。那么,如何解決呢?
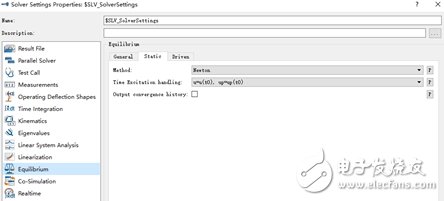
打開求解器對話框,在Equilibrium類別中發(fā)現(xiàn)靜平衡使用的求解器方法是Newton法,該方法通過力學計算得到靜平衡的解。
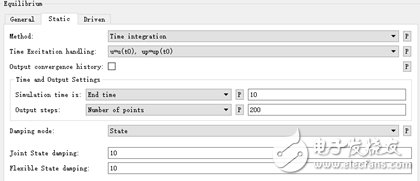
修改Method選項為Time integration,該方法使用時域積分進行平衡分析。根據(jù)模型的實際情況,修改仿真時間和輸出步長值。本模型中采用默認數(shù)值即可。保存設置并關閉求解器對話框。
在模型中,點擊在線靜平衡分析對話框進行靜平衡計算,計算時間相比Newton法明顯變長,得到的仿真結果如下,說明模型已經(jīng)基本處于平衡狀態(tài)。
得到平衡狀態(tài)下的模型如圖所示。
4.終極大招
如果上述的方法都不能使模型達到平衡狀態(tài),那么還有終極大招,可用于一切模型,即:使用時域積分方法對模型進行仿真分析,把仿真結束時的最終狀態(tài)導入到模型中,使模型達到或接近平衡狀態(tài)。注意:模型要去掉所有的激勵和驅(qū)動。
還以小球接觸這個模型為例,設置時域仿真時間為30s,采樣頻率為200Hz,進行離線時域分析。仿真完成后,在output文件夾中會生成.spckst格式文件,該文件保存仿真結束時的模型狀態(tài)。
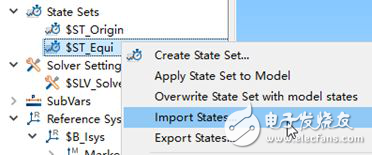
在模型前處理中,新建兩個狀態(tài)集,其中一個為$ST_Origin表示原始狀態(tài),另一個為$ST_Equi用于保存得到的平衡狀態(tài)。選擇$ST_Equi點擊右鍵選擇Import States命令,并選擇output文件夾中生成的.spckst格式文件導入。
把該狀態(tài)集應用到模型,當前模型的顯示如下圖所示,進行在線時域分析發(fā)現(xiàn)模型已經(jīng)處于平衡狀態(tài)。
總結,在進行多體動力學分析之前,通常要把模型處于平衡狀態(tài),Simpack提供多種方法使模型達到平衡狀態(tài),為后續(xù)的精確分析打下基礎。
-
平衡
+關注
關注
0文章
20瀏覽量
14586 -
動力學
+關注
關注
0文章
107瀏覽量
17194
發(fā)布評論請先 登錄
輪轂電機驅(qū)動電動汽車垂向動力學控制研究綜述
Adams多體動力學仿真解決方案全面解析
[下載]想了解多體動力學軟件嗎?有教程分享及免費試用下載
基于多體系統(tǒng)動力學的空氣懸架大客車平順性試驗仿真研究
淺析Nidoc - 970尿動力學分析儀的臨床應用
空間柔性機器人動力學分析的快速積分算法
abaqus動力學有限元分析指南
一種斷路器多體動力學仿真方法
機械系統(tǒng)動力學分析及ADAMS應用電子教程免費下載
綜合車輛動力學仿真軟件ModelBase的簡單介紹
應用Inspire 軟件對齒輪系統(tǒng)進行多體動力學仿真分析

Adams—系統(tǒng)級多體動力學仿真平臺

基于車輛動力學模型的橫向控制






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論