 使用S7-1500來控制S110伺服驅動器
使用S7-1500來控制S110伺服驅動器

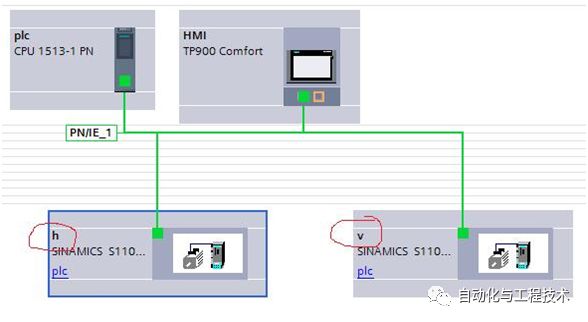
1. 系統配置
硬件配置如下:CPU 1513-1 PN 6ES7 513-1AL00-0AB0TP900 Comfort 6AV2 124-0JC01-0AX0SINAMICS S110 CU305 PN V4.4 6SL3 040-0JA01-0AA0SINAMICS S110 CU305 PN V4.4 6SL3 040-0JA01-0AA0
網絡視圖如下:
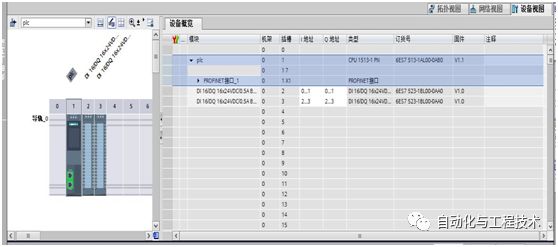
2.PLC系統組態、工藝軸組態
A、PLC組態
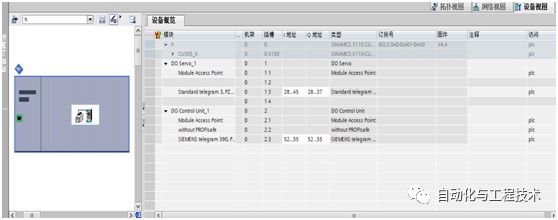
B、水平軸組態
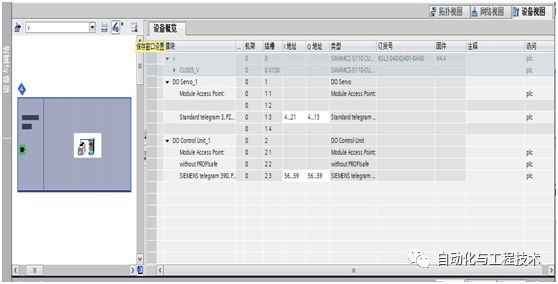
C、垂直軸組態
D、插入工藝對象Axis_H和Axis_V


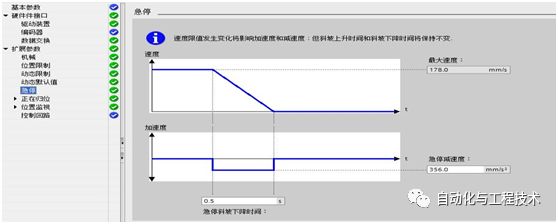
E、工藝對象Axis_H組態
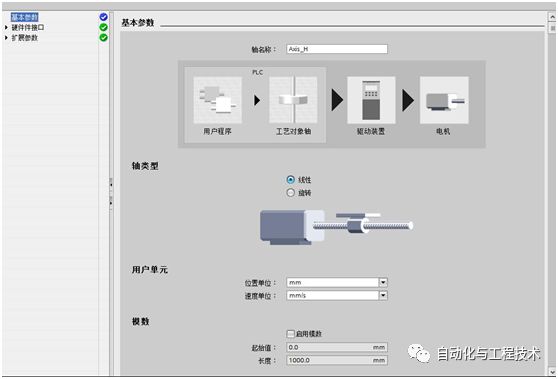
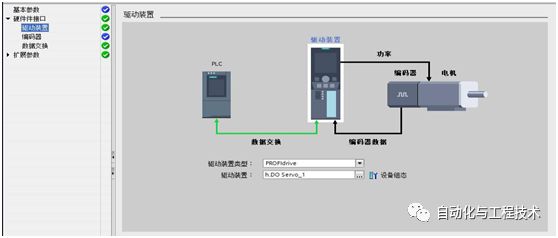
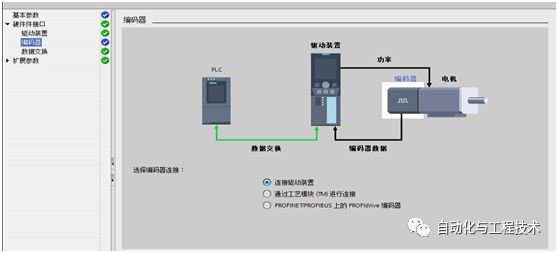
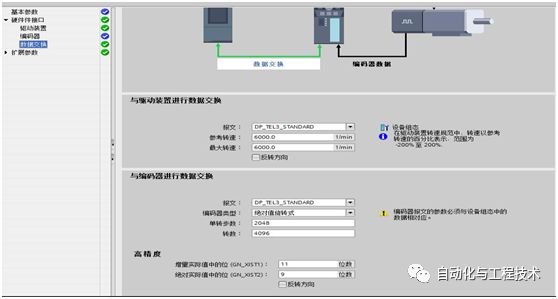
注意:報文需與Starter里面組態報文一致;參考轉速、最大轉速、單轉步數、轉數、GN_XIST1、GN_XIST2均可在Starter在線后參數里面查看。
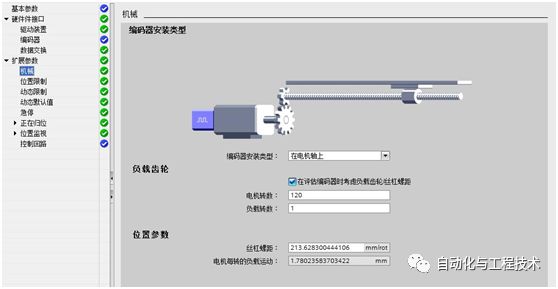
減速比,螺距均安實際情況計算所得。
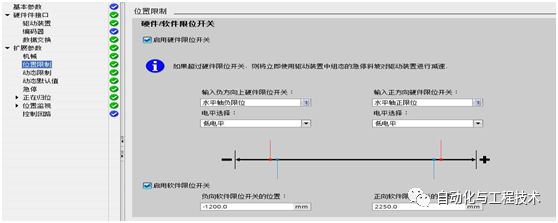
軟、硬限位在調試初期可以不組態,等后期完善再添加即可。
F、工藝對象Axis_V組態同上
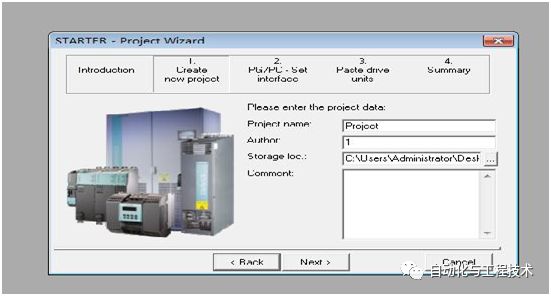
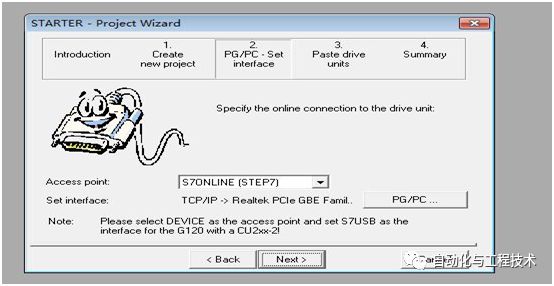
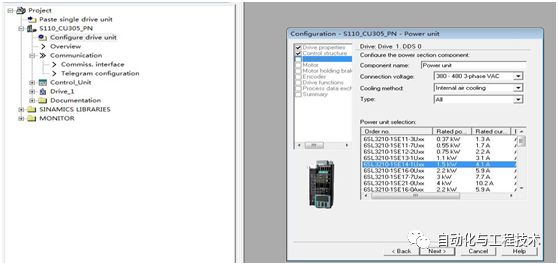
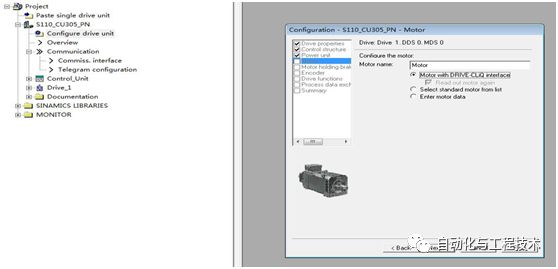
3.Starter組態A、新建一個項目
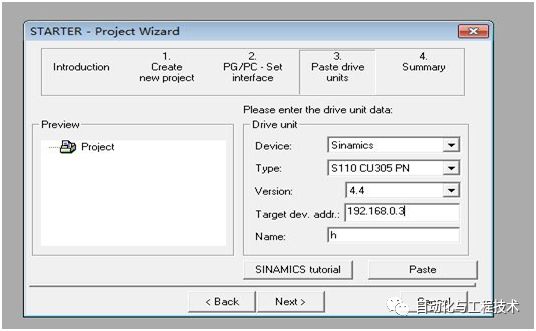
Config drive unit
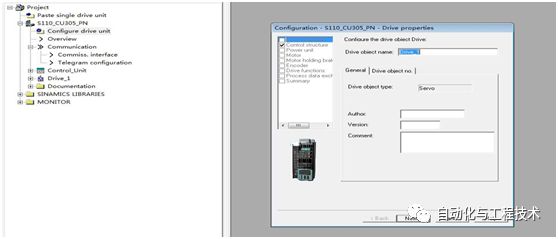
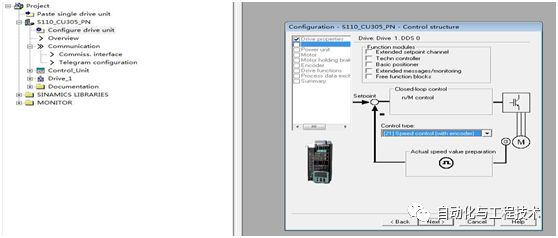
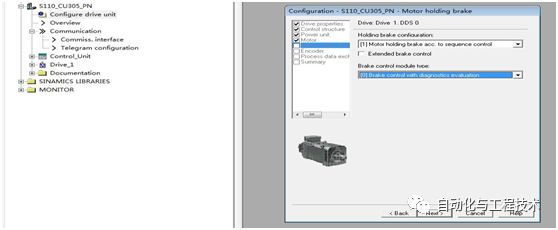
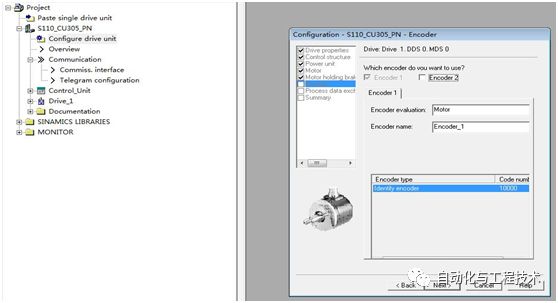
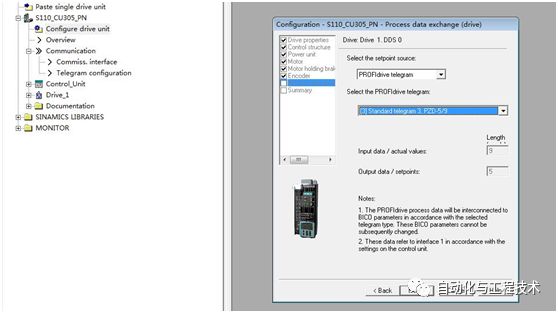
報文和工藝軸里面組態要一致。
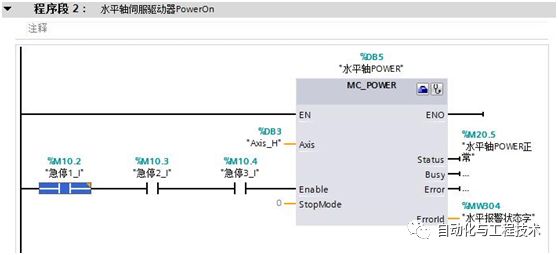
4.PLC手動調試程序編寫
A、驅動器使能
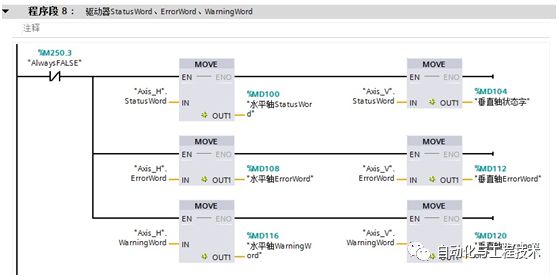
B、驅動器StatusWord、ErrorWord、WarningWord讀取
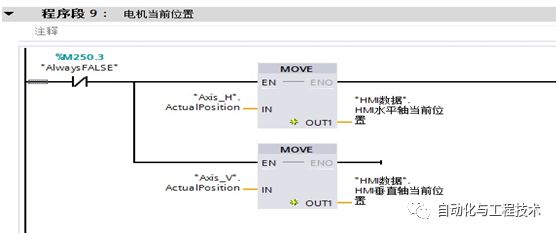
C、電機當前位置讀取
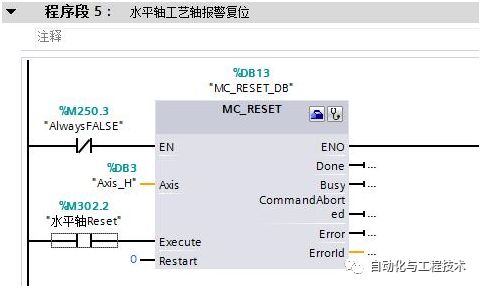
D、工藝報警復位程序編寫
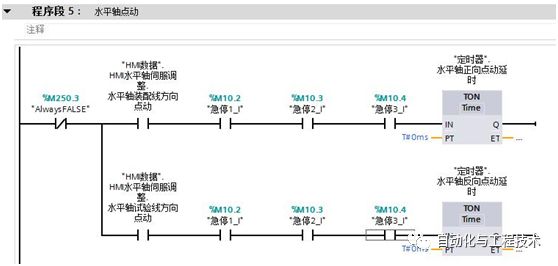
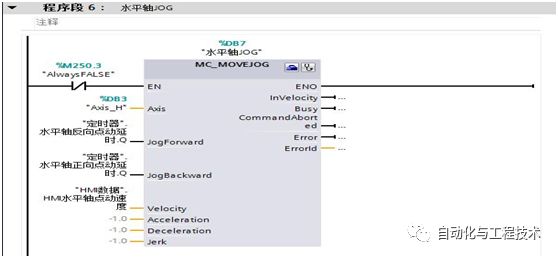
E、點動程序編寫
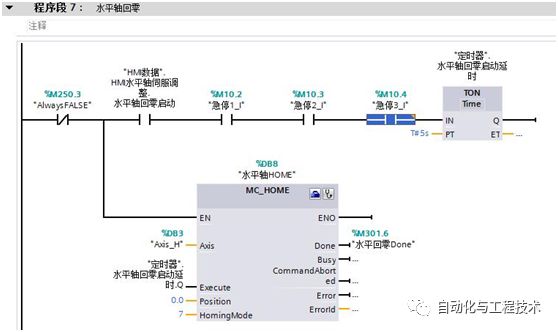
F、回零程序編寫
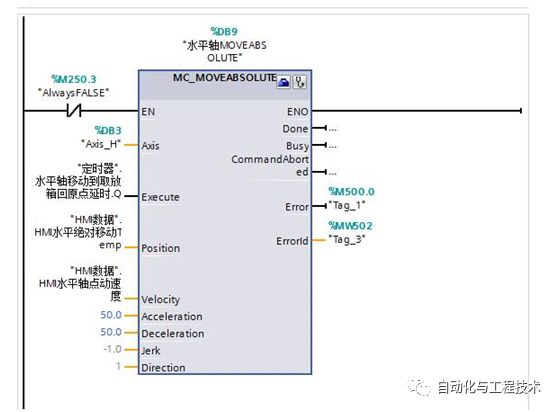
G、絕對位置運動程序編寫
-
plc
+關注
關注
5037文章
13919瀏覽量
474527 -
伺服驅動器
+關注
關注
22文章
526瀏覽量
32575 -
S7-1500
+關注
關注
3文章
301瀏覽量
6851
原文標題:手把手教你用S7-1500控制S110伺服驅動器
文章出處:【微信號:robotqy,微信公眾號:機械自動化前沿】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
S7-1500系列PLC+變頻器+編碼器組成位置控制系統設計原理
基于S7-1500的運動控制原理及實例

S7-1500連接V90實現的定位控制

基于S7-1500的運動控制功能介紹

SINAMICS S110單軸定位伺服驅動器選型手冊
SINAMICS S110功能及接線圖
關于S7-1200或S7-1500 PLC的通信
S7-1500 CPU支持與其它S7-1500 CPU進行直接數據交換
WinCC與 S7-1200/S7-1500 PLC之間的通信解析
西門子S7-1500 之間 S7 通信

S7-1500之間S7通信實例






 工商網監
工商網監
評論