 詳細探討波士頓動力機器人背后的技術實現
詳細探討波士頓動力機器人背后的技術實現
本文從波士頓動力背后申請的專利入手,從動力系統、步態分析,詳細探討了波士頓動力機器人背后的技術實現。
波士頓動力四足機器人的發展歷程(前世今身)
相比于輪式或履帶機器人,波士頓足式機器人具有更強的地形適應能力,身體十分靈活,可以在各種崎嶇不平的地面行走。
奔跑性能極強的Wildcat
平衡力極強的Spot
不懼摔倒的SpotMini
歡樂起舞的新版SpotMini
經過一年年的技術迭代,波士頓動力的四足機器人不再僅僅是應對軍方的大狗機器人,而越來越變得小巧靈活,適應力極強。
為了探索其背后的技術路線,我們對波士頓動力申請的專利進行了檢索分析:
波士頓專利布局
對主要申請人Boston Dynamics進行檢索,檢索截止日期為2019年1月,其中涉及機器人的專利文獻共有72篇,對其進行簡單統計,可以得到如下結果:
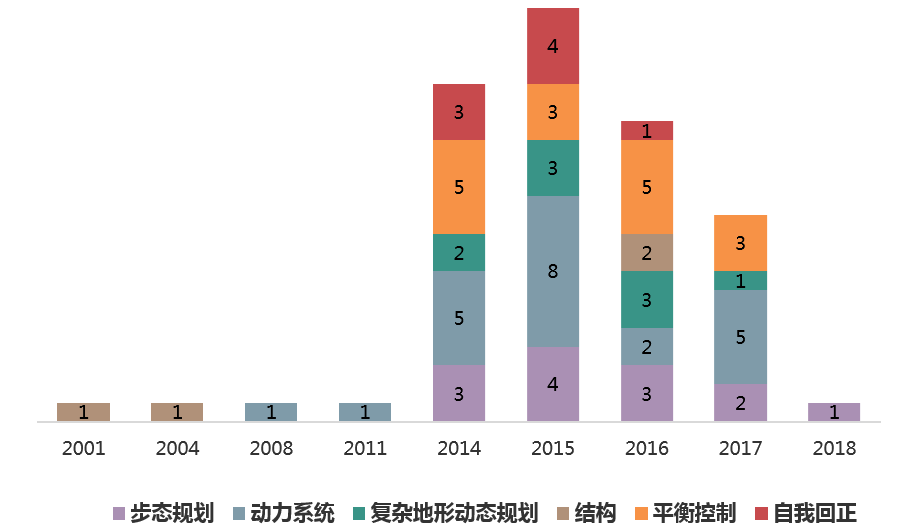
波士頓動力的專利申請態勢圖
可以看出:從2001~2011年,波士頓動力共申請了4件有關足式機器人的專利,這十年是足式機器人技術的探索階段,即專利布局的早期階段;從2014年開始,波士頓動力在足式機器人的不同技術維度開始進行專利布局;直至2017年都保持了較高的申請量,這期間不斷推出了足式機器人的改進版,于2016-2017年推出的SpotMini是更新換代的產品(爬樓梯的SpotMini),為其商業化應用奠定了基礎。
如下圖所示,通過對上述72篇專利進行分類標引,波士頓動力四足機器人的技術領域主要涉及液壓驅動和電液混合驅動,上述技術保證了機器人具有較強的運動能力。而步態規劃、平衡控制、復雜地形動態規劃以及自我回正屬于機器人的運動控制,同時也是波士頓的核心技術,上述技術使機器人更好的適應環境,維持動態平衡,實現智能移動。
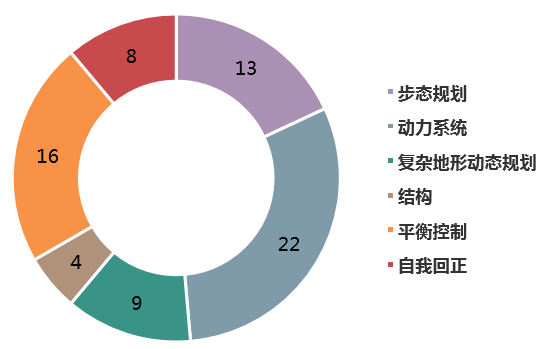
波士頓動力的專利技術分布圖
下圖為波士頓動力足式機器人專利技術路線圖。
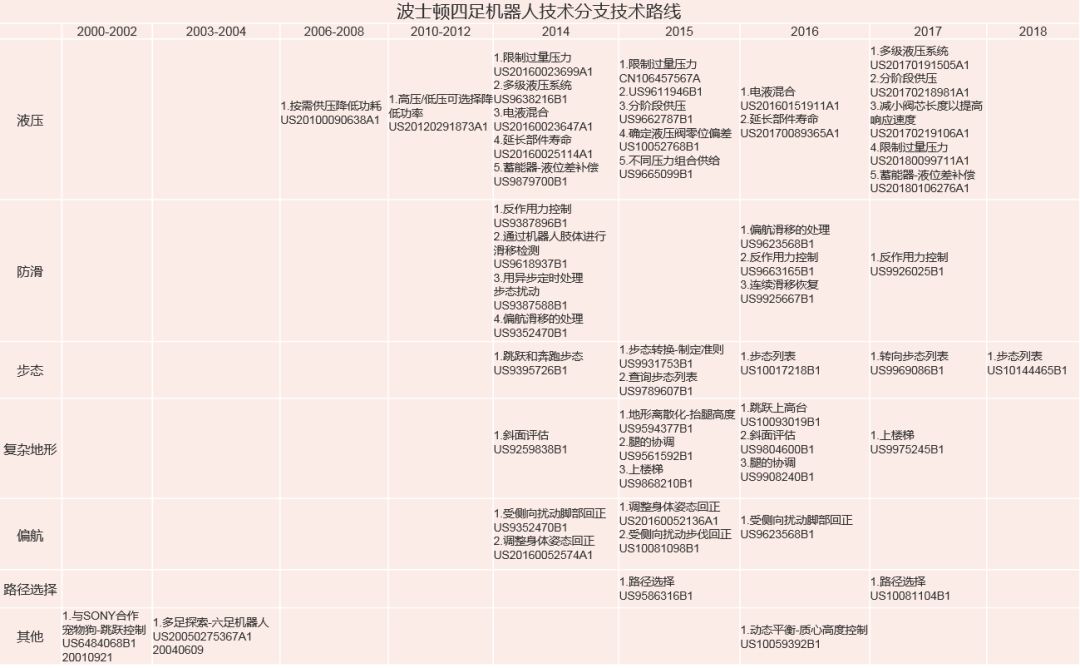
波士頓四足機器人技術路線圖
1、波士頓動力早期專利
通過分析波士頓動力的專利申請趨勢可發現,波士頓動力雖然成立于1992年,然而早期的專利申請多是關于離合器、軸承、醫療器械等,直至2001年9月21日才與SONY公司聯合申請一種仿生寵物狗機器人專利(US6484068B1),該專利主要解決的是寵物狗機器人的跳躍控制,如下圖。
US6484068B1附圖
專利中將跳躍劃分為兩個控制階段,第一階段控制機器人的四個腳同時跳離地面,第二階段控制前腿先落地后腿后落地,通過改變腿的落地角度和延遲角度實現落地。
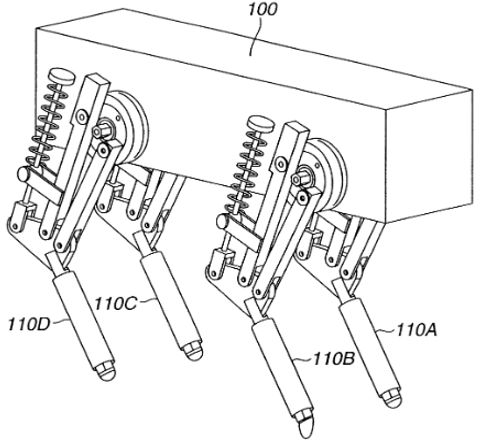
而在2004年6月9日波士頓動力獨立申請了一份可以行走或爬行的多足機器人的專利US20050275367A1,設置在機身上的12個電機通過錐齒輪機構驅動六個腿的運動,如下圖所示。通過這種錐齒輪機構還可實現機器人身體高度的調整。
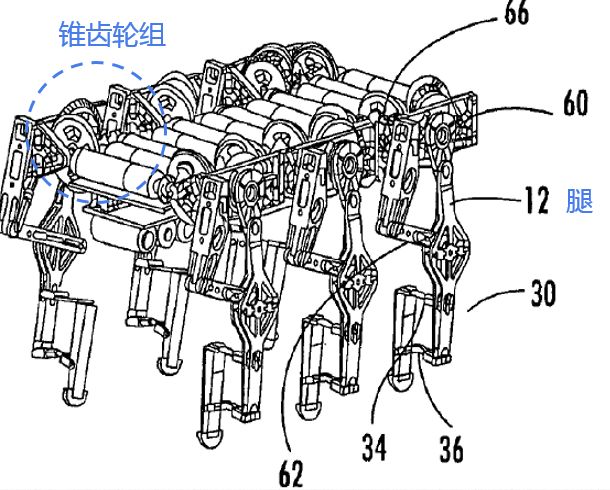
US20050275367A1附圖
US20050275367A1附圖
經過了前期在多足機器人領域的探索,波士頓動力在多足機器人的發展上持續改進,并將其成果進行專利布局。
2、四足機器人動力系統分析
動力問題是機器人的核心問題,關系著機器人能否動起來,工作時間的長短。波士頓動力早期的機器人主要是電機通過齒輪驅動連桿機構,對于沒有載荷要求的機器人而言是足夠的,對如Bigdog這類以內燃機為動力且需搭載較大負荷的機器人則顯得力不從心,為此,波士頓動力在液壓驅動方面布局了較多專利,如下圖的液壓控制技術發展路線。
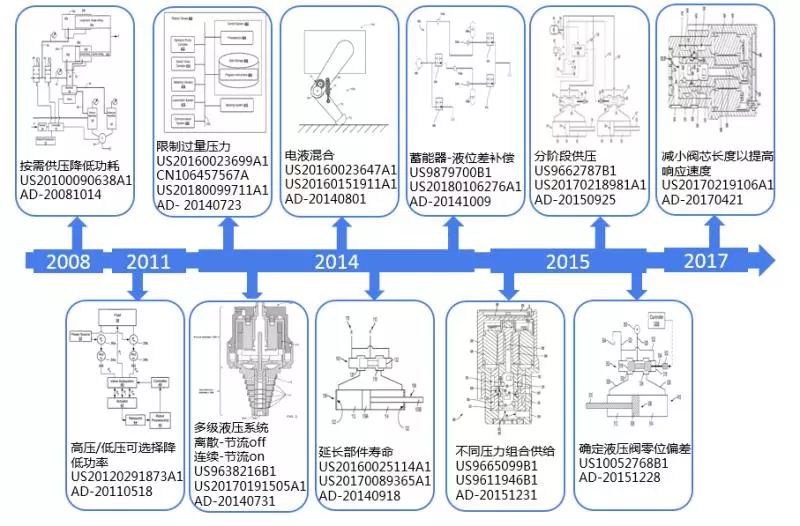
波士頓動力液壓控制發展路線圖
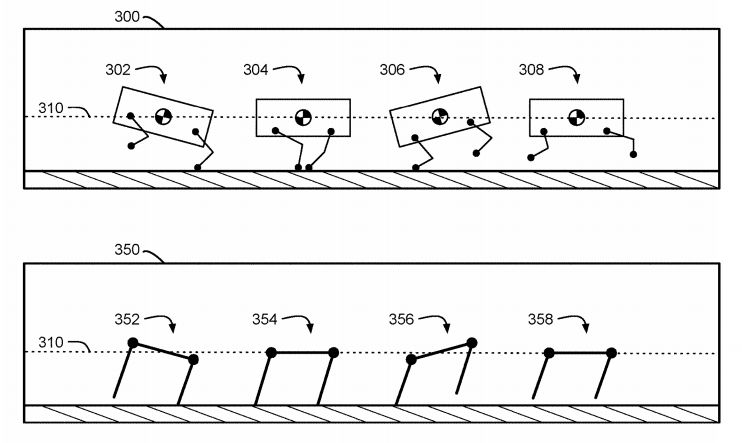
BigDog系統能耗高的問題突出,能量的多次轉換、多環節傳遞造成了大能量損失,如下圖所示為足式機器人在前行中理想的足部軌跡,腿部的運動是通過液壓系統實現,在理想軌跡下機器人可降低液壓驅動能耗。
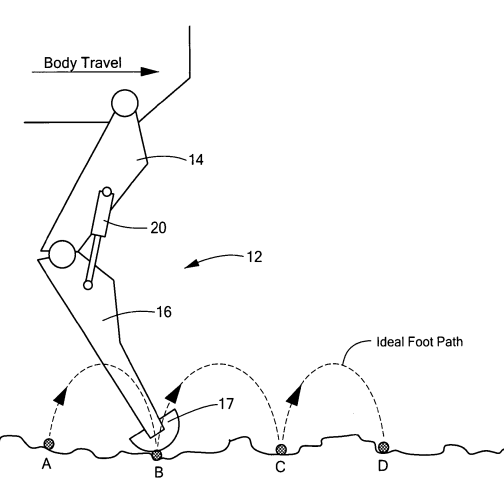
足部理想軌跡圖
足式機器人在不同場合需要不同的功率供給,具有不同功率模式切換是降低功耗的重要手段,為此,波士頓動力在2008年10月14日提交的專利US20100090638A1中通過傳感器檢測力,控制器控制閥適時進行開關動作,實現按需高功率或者低功率模式。
在此基礎上,波士頓動力在2011年5月18日提交的專利申請US20120291873A1中公開了一種具有高壓油路,中壓油路和低壓返回油路的液壓系統,如下圖所示。
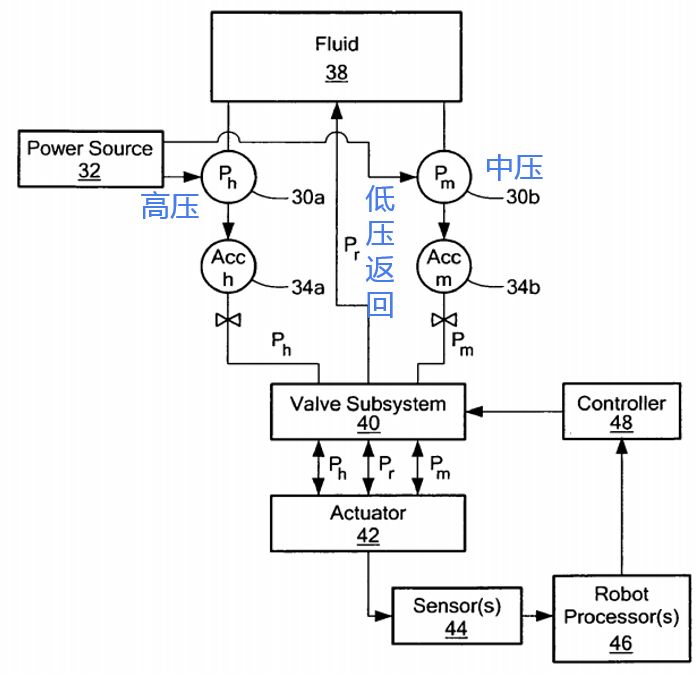
US20120291873A1附圖
為了提高機器人運行的效率、減小功率消耗以及提高運動的穩健性,波士頓動力在2014年8月1日提交的專利US20160023647A1中通過判斷關節承受的載荷類型和大小,以選擇適當的液壓或電動致動器,使得機器人的功率消耗最低。如下圖所示,機器人根據不同的負載選擇不同的驅動方式組合。
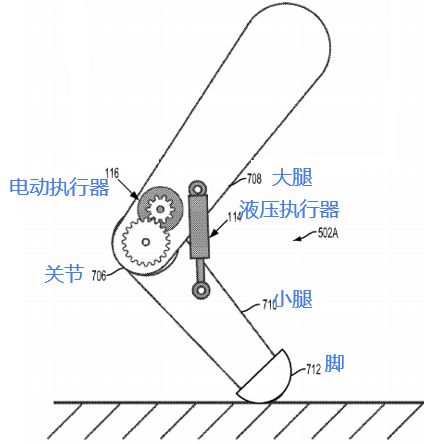
US20160023647A1附圖
下圖是機器人的期望驅動力,期望的力為液壓驅動力和電驅動力的總和,液壓驅動為離散力,電驅動為連續的力,兩種驅動方式相互補充從而形成期望的力,達到最佳的驅動效率。
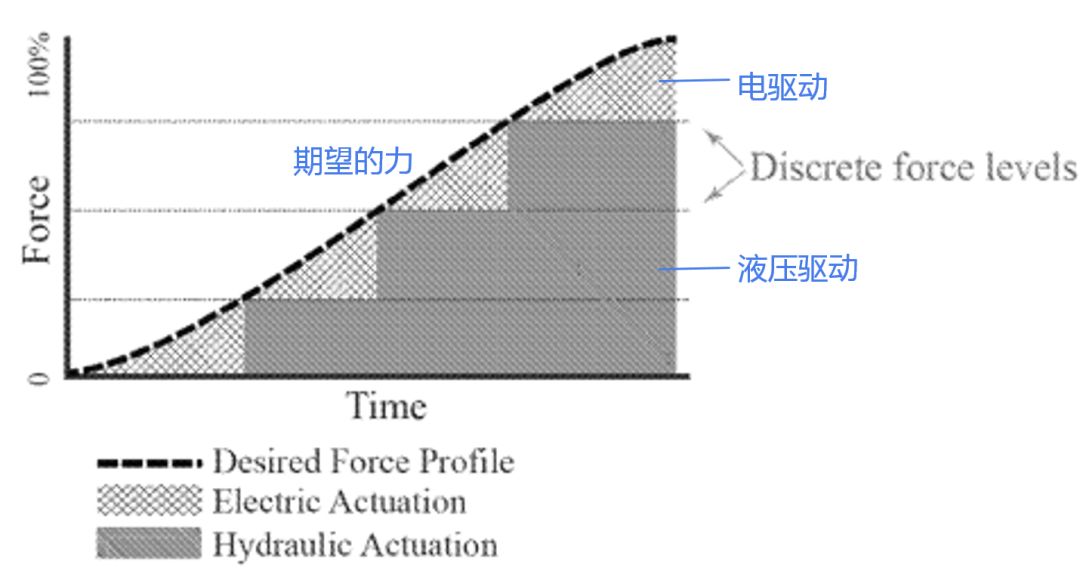
US20160023647A1附圖
比外,波士頓動力還在提高液壓系統的穩定供壓、通過不同壓力組合、分階段供壓、提高液壓部件損壞工作壽命、提高閥的響應速度等方面均進行了專利布局。以上這些專利中的技術均用于保證液壓系統高效和可靠工作。
3、四足機器人步態分析
在解決了動力方面的問題后,還需解決機器人如何動的問題。四足機器人在行進時不同的時間段需要不同的行進速度,而不同的行進速度對應不同的步態,四足機器人的步態包括Walk(慢走)、Trot(小跑)、Bounding(跳躍)、Gallop(飛奔)。
Wildcat奔跑轉向
上圖中的Wildcat正在以Bounding步態奔跑并完成了奔跑狀態下的轉向,整個過程都很流暢。可看出波士頓動力已經很好的解決了機器人在各種速度下的步態轉換。下面將波士頓動力在該方面的專利進行如下分析。
3.1 步態轉換
步態轉換技術發展
通過檢索,波士頓動力在步態轉換方面先后申請了6件專利,其技術發展如上圖所示,主要涉及如何實現不同步態、制定步態轉換準則、制定步態列表等。
3.2 步態控制和轉向
Trot
Gallop
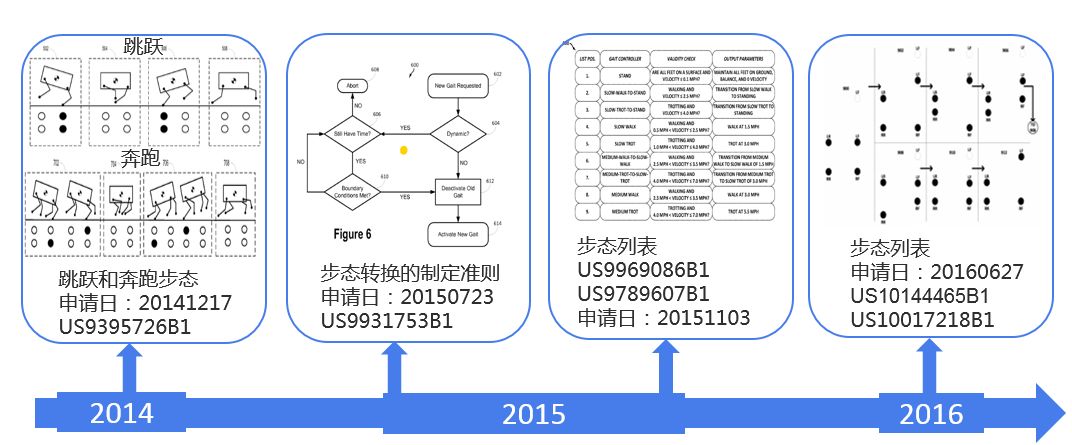
波士頓動力在2014年12月17日申請且已授權的專利US9395726B1中公開了機器人通過控制俯仰角、高度、速度以及其產生的力實現不同的步態,下圖所示,Bound步態用于完成一般奔跑,而Gallop步態適合于高速奔跑。
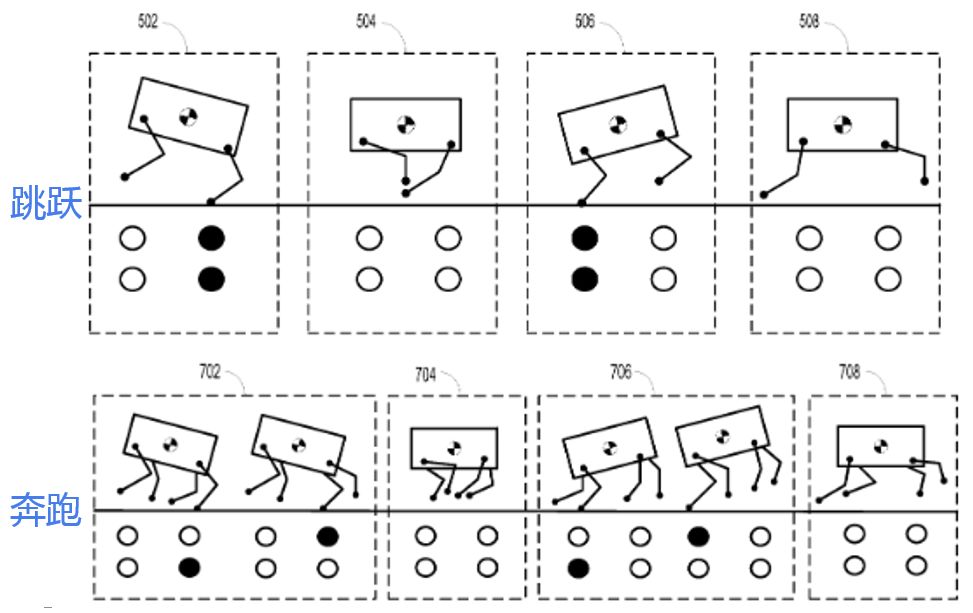
US9395726B1附圖
而當機器人需要轉向時,可通過橫向移動側方的兩條腿并配合轉動和偏航角來實現機器人整體的轉彎,如下圖所示。
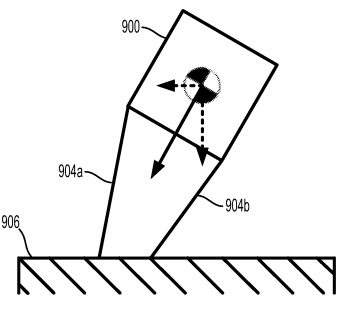
US9395726B1附圖
3.3 制定步態準則
基于上篇專利涉及的不同步態,波士頓動力為實現各種步態轉換制定了步態準則,并在2015年7月23日申請且已授權的專利US9931753B1中,公開了可自動實現所需步態的轉換的方法,通過識別當前的步態信息,根據不同的操作標準判斷當前的步態是否屬于其中,并按照其中的一種步態行走。
3.4 制定步態列表
波士頓動力為實現各種步態的順利轉換,制定了步態列表并可查詢,其在2015年11月3日申請且已授權的專利US9789607B1、以及在2016年06月27日申請且已授權的專利US10017218B1中,均公開了基于轉向命令使足式機器人實現目標步態。
US9789607B1側重于不同步態列表的查詢、US10017218B1側重于相同步態的腿的行走順序并避免失步,如下圖所示為制定的步態列表。
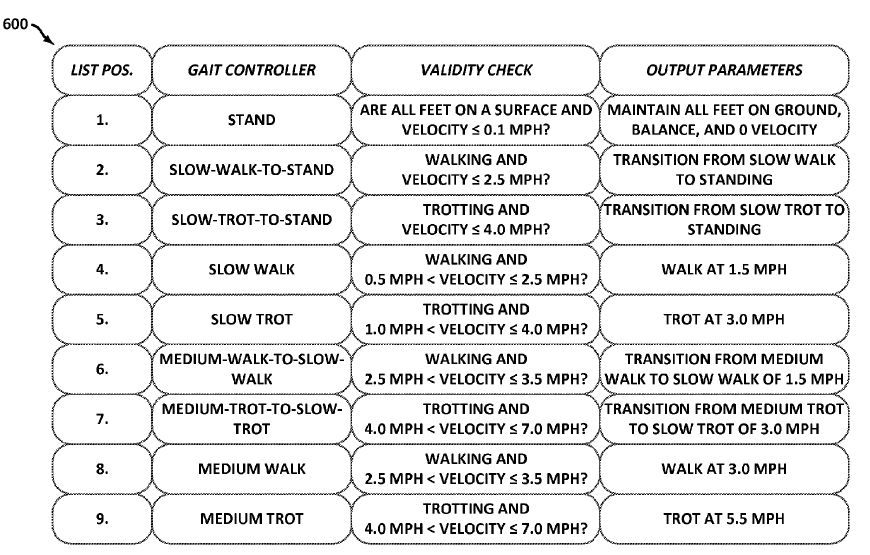
US9789607B1附圖
根據不同的速度區間設計不同步態,并排列成步態列表,在機器人內部存儲有多個步態列表。實際操作中,根據機器人的行走速度判斷所處的狀態,遍歷列表,直至獲得相符的步態,進而控制機器人以相關步態行走。
US9789607B1附圖
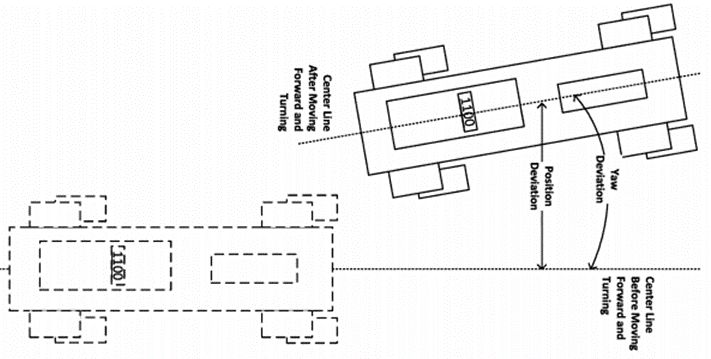
該專利中再次涉及了機器人通過步態調整實現轉向,如上圖所示,當機器人遇到障礙物時,機器人通過轉向避開障礙,機器人根據偏航偏差和位置偏差進行轉向。該專利中還涉及了Walk和Trot的切換方式,如下圖所示,在416后切換為500,進而開始Trot步態。
Walk轉Trot
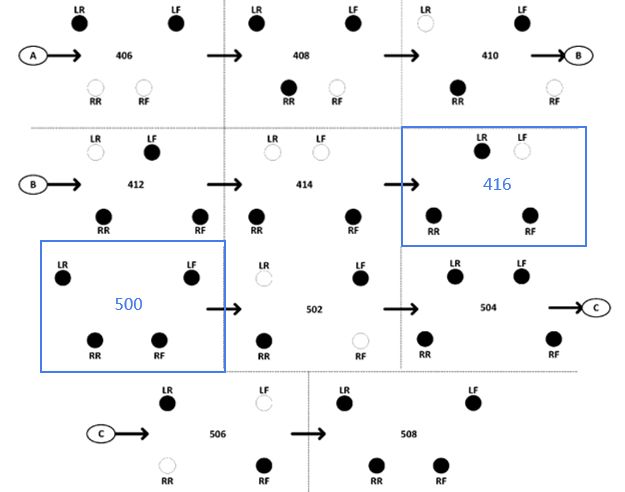
US9789607B1中的Walk和Trot轉換
3.5 保持前后重心高度一致
機器人在行進中,由于諸多原因導致重心發生傾斜,處于懸空狀態下的邁步腿根據當前支撐腿及機身的狀態選擇正確的落地位置,保證機體重心落在穩定區域之內。
基于此,波士頓動力在2016年6月27日申請且已授權的專利US10059392B1中公開了一種控制具有非恒定俯仰角和高度的機器人裝置,通過調整機器人前后部分的質心位置可以使保證機器人在奔跑中保持機身重心高度一致,如下圖。
US10059392B1附圖
如果硬要給波士頓動力的四足機器人劃定一個界限,以上便是其四足機器人的前世。
采用液壓控制,采用控制閥、高低壓選擇供壓的方式降低系統能耗,采用離散/連續控制、蓄能器、壓力預測、不同液壓壓力、分階段供壓組合的方式保證機器人足夠的壓力供給的;早期聚焦的是如何實現四足機器人的不同步態,讓它有不同的風姿~
如今的Spot及SpotMini中采用電液混合的方式驅動降低能耗,專注于不同步態之間的轉換,通過制定轉換準則從而制定步態列表,來實現其更靈活多變的姿態,或是說更像一只活靈活現的小狗。
-
機器人
+關注
關注
213文章
29463瀏覽量
211497 -
電機
+關注
關注
143文章
9246瀏覽量
148305 -
波士頓動力
+關注
關注
3文章
178瀏覽量
13393
原文標題:硬核干貨!揭秘波士頓動力背后的專利技術
文章出處:【微信號:AI_era,微信公眾號:新智元】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
全球首次!中國機器人原地側空翻,打破技術壁壘
NVIDIA 通過云端至機器人計算平臺驅動人形機器人技術,賦能物理 AI

盤點#機器人開發平臺
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
機器人靈巧手進入規模量產時刻!4款新品亮相

漢威科技柔性觸覺傳感器:為人形機器人裝上“中國觸覺”

發力機器人傳感器領域,華培動力擬設立機器人全資子公司






 工商網監
工商網監
評論