") 機(jī)器視覺系統(tǒng)中常用攝像機(jī)的分類
機(jī)器視覺系統(tǒng)中常用攝像機(jī)的分類
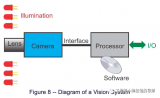
攝像機(jī)是機(jī)器視覺系統(tǒng)中的一個(gè)關(guān)鍵組件,其最本質(zhì)的功能就是將光信號(hào)轉(zhuǎn)變成為有序的電信號(hào)。選擇合適的攝像機(jī)也是機(jī)器視覺系統(tǒng)設(shè)計(jì)中的重要環(huán)節(jié),攝像機(jī)的不僅是直接決定所采集到的圖像分辨率、圖像質(zhì)量等,同時(shí)也與整個(gè)系統(tǒng)的運(yùn)行模式直接相關(guān)。
主要參數(shù)
1. 分辨率(Resolution):攝像機(jī)每次采集圖像的像素點(diǎn)數(shù)(Pixels),對(duì)于數(shù)字?jǐn)z像機(jī)一般是直接與光電傳感器的像元數(shù)對(duì)應(yīng)的,對(duì)于模擬攝像機(jī)則是取決于視頻制式,PAL制為768*576,NTSC制為640*480。
2. 像素深度(Pixel Depth):即每像素?cái)?shù)據(jù)的位數(shù),一般常用的是8Bit,對(duì)于數(shù)字?jǐn)z像機(jī)一般還會(huì)有10Bit、12Bit等。
3. 最大幀率(Frame Rate)/行頻(Line Rate):攝像機(jī)采集傳輸圖像的速率,對(duì)于面陣攝像機(jī)一般為每秒采集的幀數(shù)(Frames/Sec.),對(duì)于線陣攝像機(jī)為每秒采集的行數(shù)(Hz)。
4. 曝光方式(Exposure)和快門速度(Shutter):對(duì)于線陣攝像機(jī)都是逐行曝光的方式,可以選擇固定行頻和外觸發(fā)同步的采集方式,曝光時(shí)間可以與行周期一致,也可以設(shè)定一個(gè)固定的時(shí)間;面陣攝像機(jī)有幀曝光、場(chǎng)曝光和滾動(dòng)行曝光等幾種常見方式,數(shù)字?jǐn)z像機(jī)一般都提供外觸發(fā)采圖的功能。快門速度一般可到10微秒,高速攝像機(jī)還可以更快。
5. 像元尺寸(Pixel Size):像元大小和像元數(shù)(分辨率)共同決定了攝像機(jī)靶面的大小。目前數(shù)字?jǐn)z像機(jī)像元尺寸一般為3μm-10μm,一般像元尺寸越小,制造難度越大,圖像質(zhì)量也越不容易提高。
6. 光譜響應(yīng)特性(Spectral Range):是指該像元傳感器對(duì)不同光波的敏感特性,一般響應(yīng)范圍是350nm-1000nm,一些攝像機(jī)在靶面前加了一個(gè)濾鏡,濾除紅外光線,如果系統(tǒng)需要對(duì)紅外感光時(shí)可去掉該濾鏡。
機(jī)器視覺系統(tǒng)中常用攝像機(jī)的分類
根據(jù)不同感光芯片劃分
我們知道感光芯片是攝像機(jī)的核心部件,目前攝像機(jī)常用的感光芯片有CCD和CMOS兩種:
1.CCD攝像機(jī),CCD稱為電荷耦合器件,CCD實(shí)際上只是一個(gè)把從圖像半導(dǎo)體中出來的電子有組織地儲(chǔ)存起來的方法。
2.CMOS攝像機(jī),CMOS稱為“互補(bǔ)金屬氧化物半導(dǎo)體”,CMOS實(shí)際上只是將晶體管放在硅塊上的技術(shù),沒有更多的含義。
盡管CCD表示“電荷耦合器件”而CMOS表示“互補(bǔ)金屬氧化物半導(dǎo)體”,但是不論CCD或者CMOS對(duì)于圖像感應(yīng)都沒有用,真正感應(yīng)的傳感器稱做“圖像半導(dǎo)體”,CCD和CMOS傳感器實(shí)際使用的都是同一種傳感器“圖像半導(dǎo)體”,圖像半導(dǎo)體是一個(gè)P N結(jié)合半導(dǎo)體,能夠轉(zhuǎn)換光線的光子爆炸結(jié)合處成為成比例數(shù)量的電子。電子的數(shù)量被計(jì)算信號(hào)的電壓,光線進(jìn)入圖像半導(dǎo)體得越多,電子產(chǎn)生的也越多,從傳感器輸出的電壓也越高。
因?yàn)槿搜勰芸吹?Lux照度(滿月的夜晚)以下的目標(biāo),CCD傳感器通常能看到的照度范圍在0.1~3Lux,是CMOS傳感器感光度的3到10倍,所以目前一般CCD攝像機(jī)的圖像質(zhì)量要優(yōu)于CMOS攝像機(jī)。
CMOS可以將光敏元件、放大器、A/D轉(zhuǎn)換器、存儲(chǔ)器、數(shù)字信號(hào)處理器和計(jì)算機(jī)接口控制電路集成在一塊硅片上,具有結(jié)構(gòu)簡(jiǎn)單、處理功能多、速度快、耗電低、成本低等特點(diǎn)。CMOS攝像機(jī)存在成像質(zhì)量差、像敏單元尺寸小、填充率低等問題,1989年后出現(xiàn)了“有源像敏單元”結(jié)構(gòu),不僅有光敏元件和像敏單元的尋址開關(guān),而且還有信號(hào)放大和處理等電路,提高了光電靈敏度、減小了噪聲,擴(kuò)大了動(dòng)態(tài)范圍,使得一些參數(shù)與CCD攝像機(jī)相近,而在功能、功耗、尺寸和價(jià)格方面要優(yōu)于CCD,逐步得到廣泛的應(yīng)用。CMOS傳感器可以做得非常大并有和CCD傳感器同樣的感光度,因此非常適用于特殊應(yīng)用。CMOS傳感器不需要復(fù)雜的處理過程,直接將圖像半導(dǎo)體產(chǎn)生的電子轉(zhuǎn)變成電壓信號(hào),因此就非常快,這個(gè)優(yōu)點(diǎn)使得CMOS傳感器對(duì)于高幀攝像機(jī)非常有用,高幀速度能達(dá)到400到100000幀/秒。
按輸出圖像信號(hào)格式劃分
模擬攝像機(jī)
模擬攝像機(jī)所輸出的信號(hào)形式為標(biāo)準(zhǔn)的模擬量視頻信號(hào),需要配專用的圖像采集卡才能轉(zhuǎn)化為計(jì)算機(jī)可以處理的數(shù)字信息。模擬攝像機(jī)一般用于電視攝像和監(jiān)控領(lǐng)域,具有通用性好、成本低的特點(diǎn),但一般分辨率較低、采集速度慢,而且在圖像傳輸中容易受到噪聲干擾,導(dǎo)致圖像質(zhì)量下降,所以只能用于對(duì)圖像質(zhì)量要求不高的機(jī)器視覺系統(tǒng)。常用的攝像機(jī)輸出信號(hào)格式有:
PAL(黑白為CCIR),中國電視標(biāo)準(zhǔn),625行,50場(chǎng)
NTSC(黑白為EIA),日本電視標(biāo)準(zhǔn),525行,60場(chǎng)
SECAM
S-VIDEO
分量傳輸
數(shù)字?jǐn)z像機(jī)
數(shù)字?jǐn)z像機(jī)是在內(nèi)部集成了A/D轉(zhuǎn)換電路,可以直接將模擬量的圖像信號(hào)轉(zhuǎn)化為數(shù)字信息,不僅有效避免了圖像傳輸線路中的干擾問題,而且由于擺脫了標(biāo)準(zhǔn)視頻信號(hào)格式的制約,對(duì)外的信號(hào)輸出使用更加高速和靈活的數(shù)字信號(hào)傳輸協(xié)議,可以做成各種分辨率的形式,出現(xiàn)了目前數(shù)字?jǐn)z像機(jī)百花齊放的形勢(shì)。常見的數(shù)字?jǐn)z像機(jī)圖像輸出標(biāo)準(zhǔn)有:
IEEE1394
USB2.0
DCOM3
RS-644 LVDS
Channel Link LVDS
Camera Link LVDS
千兆網(wǎng)
按像元排列方式劃分
面陣攝像機(jī)
面陣攝像機(jī)是我們常見的形式,其像元是按行列整齊排列的,每個(gè)像元對(duì)應(yīng)圖像上的一個(gè)像素點(diǎn),我們一般所說的分辨率就是指像元的個(gè)數(shù)。需要指出的是我們計(jì)算機(jī)中的彩色圖像一般是每個(gè)像素點(diǎn)由R、G、B三個(gè)值來表示,但我們一般的彩色攝像機(jī)卻并不是這樣的,下面分別進(jìn)行介紹:
黑白攝像機(jī),每個(gè)像素點(diǎn)對(duì)應(yīng)一個(gè)像元,該像元對(duì)于各種波長的光具有較一致的敏感度,采集得到的只是每個(gè)像素點(diǎn)的灰度值。
采用BAYER轉(zhuǎn)化的單片彩色攝像機(jī),這種攝像機(jī)的每個(gè)像素點(diǎn)實(shí)際只對(duì)應(yīng)R、G、B三種之一的像元,R、G、B三種像元按一定的規(guī)律排列,我們實(shí)際所得到的每個(gè)像素點(diǎn)的R、G、B三原色的數(shù)值是根據(jù)該像素點(diǎn)及其周圍若干點(diǎn)的三色數(shù)值進(jìn)行BAYER插分計(jì)算而來的,所以這種攝像機(jī)所得到的圖像往往不能得到很好的彩色效果,尤其是對(duì)應(yīng)邊緣位置會(huì)有較明顯的色彩失真和細(xì)節(jié)的丟失。目前我們常見的彩色攝像機(jī)一般是這種形式的,其價(jià)格和同檔次的黑白攝像機(jī)相近。
BAYER彩色攝像機(jī)原理圖
3CCD彩色攝像機(jī),這種攝像機(jī)每個(gè)像素點(diǎn)對(duì)應(yīng)有R、G、B三個(gè)感光元件,采用分光棱鏡將入射光線分別折射到三個(gè)CCD靶面上,分別進(jìn)行光電轉(zhuǎn)換得到R、G、B三色的數(shù)值(見下圖)。這種攝像機(jī)得到的圖像質(zhì)量好,沒有細(xì)節(jié)丟失的問題,但由于攝像機(jī)結(jié)構(gòu)復(fù)雜,所以一般較昂貴。另外由于這種攝像機(jī)采用了分光棱鏡的方式,光線到達(dá)每個(gè)CCD靶面的光程是不一樣的,所以需要鏡頭做針對(duì)性的設(shè)計(jì)才能達(dá)到比較好的圖像效果,所以使用3CCD的攝像機(jī)還需要配備專用的鏡頭。
3CCD彩色攝像機(jī)原理圖
線陣攝像機(jī)
線陣攝像機(jī)是一種比較特殊的形式,其像元是一維線狀排列的,即只有一行像元,每次只能采集一行的圖像數(shù)據(jù),只有當(dāng)攝像機(jī)與被攝物體在縱向相對(duì)運(yùn)動(dòng)時(shí)才能得到我們平常看到的二維圖像。所以在機(jī)器視覺系統(tǒng)中一般用于被測(cè)物連續(xù)運(yùn)動(dòng)的場(chǎng)合,尤其適合于運(yùn)動(dòng)速度較快、分辨率要求較高的情況。
黑白攝像機(jī),也是最常用的線陣攝像機(jī),每個(gè)像素點(diǎn)對(duì)應(yīng)一個(gè)像元,采集得到的是灰度圖像。
3Line彩色攝像機(jī),該攝像機(jī)的具有R、G、B三行像元,分別對(duì)紅、綠、蘭三種波長的光敏感,所以每個(gè)像素點(diǎn)都會(huì)對(duì)應(yīng)R、G、B三個(gè)通道的數(shù)值,形成彩色的圖像數(shù)據(jù)。需要注意的是,由于R、G、B三行像元在同一時(shí)刻所采集的并非同一位置的信息(見圖),在實(shí)際應(yīng)用中需要進(jìn)行運(yùn)動(dòng)校正才能得到所需的彩色圖像。一般的攝像機(jī)都提供內(nèi)部進(jìn)行運(yùn)動(dòng)校正處理的功能,但對(duì)于對(duì)比度非常高的圖像邊緣還是容易出現(xiàn)色彩失真的現(xiàn)象。
3CCD彩色攝像機(jī),與面陣的3CCD攝像機(jī)原理相同,采用分光棱鏡將入射光線分別折射到三個(gè)CCD靶面上,分別進(jìn)行光電轉(zhuǎn)換得到R、G、B三色的數(shù)值。圖像質(zhì)量好,但需配備專用鏡頭。
光學(xué)鏡頭概述及分類
光學(xué)鏡頭一般稱為攝像鏡頭或攝影鏡頭,簡(jiǎn)稱鏡頭,其功能就是光學(xué)成像。鏡頭是機(jī)器視覺系統(tǒng)中的重要組件,對(duì)成像質(zhì)量有著關(guān)鍵性的作用,它對(duì)成像質(zhì)量的幾個(gè)最主要指標(biāo)都有影響,包括:分辨率、對(duì)比度、景深及各種像差。鏡頭不僅種類繁多,而且質(zhì)量差異也非常大,但一般用戶在進(jìn)行系統(tǒng)設(shè)計(jì)時(shí)往往對(duì)鏡頭的選擇重視不夠,導(dǎo)致不能得到理想的圖像,甚至導(dǎo)致系統(tǒng)開發(fā)失敗。本文的目的是通過對(duì)各種常見鏡頭的分類及主要參數(shù)介紹,總結(jié)各種因素之間的相互關(guān)系,使讀者掌握機(jī)器視覺系統(tǒng)中鏡頭的選用技巧。
根據(jù)有效像場(chǎng)的大小劃分
把攝影鏡頭安裝在一很大的伸縮暗箱前端,并在該暗箱后端安裝一塊很大的磨砂玻璃。當(dāng)將鏡頭光圈開至最大,并對(duì)準(zhǔn)無限遠(yuǎn)景物調(diào)焦時(shí),在磨砂玻璃上呈現(xiàn)出的影像均位于一圓形面積內(nèi),而圓形外則漆黑,無影像。此有影像的圓形面積稱為該鏡頭的最大像場(chǎng)。在這個(gè)最大像場(chǎng)范圍的中心部位,有一能使無限遠(yuǎn)處的景物結(jié)成清晰影像的區(qū)域,這個(gè)區(qū)域稱為清晰像場(chǎng)。照相機(jī)或攝影機(jī)的靶面一般都位于清晰像場(chǎng)之內(nèi),這一限定范圍稱為有效像場(chǎng)。由于視覺系統(tǒng)中所用的攝像機(jī)的靶面尺寸有各種型號(hào),所以在選擇鏡頭時(shí)一定要注意鏡頭的有效像場(chǎng)應(yīng)該大于或等于攝像機(jī)的靶面尺寸,否則成像的邊角部分會(huì)模糊甚至沒有影像。
根據(jù)有效像場(chǎng)的大小,一般可分為如下幾類:
鏡頭類型
有效像場(chǎng)尺寸
電視攝像鏡頭
1/4英寸攝像鏡頭
3.2mm×2.4mm(對(duì)角線4mm)
1/3英寸攝像鏡頭
4.8mm×3.6mm(對(duì)角線6mm)
1/2英寸攝像鏡頭
6.4mm×4.8mm(對(duì)角線8mm)
2/3英寸攝像鏡頭
8.8mm×6.6mm(對(duì)角線11mm)
1英寸攝像鏡頭
12.8mm×9.6mm(對(duì)角線16mm)
電影攝影鏡頭
35mm電影攝影鏡頭
21.95mm×16mm(對(duì)角線27.16mm)
16mm電影攝影鏡頭
10.05mm×7.42mm(對(duì)角線12.49mm)
照相鏡頭
135型攝影鏡頭
36mm×24mm
127型攝影鏡頭
40mm×40mm
120型攝影鏡頭
80mm×60mm
中型攝影鏡頭
82mm×56mm
大型攝影鏡頭
240mm×180mm
根據(jù)焦距分類
根據(jù)焦距能否調(diào)節(jié),可分為定焦距鏡頭和變焦距鏡頭兩大類。依據(jù)焦距的長短,定焦距鏡頭又可分為魚眼鏡頭、短焦鏡頭、標(biāo)準(zhǔn)鏡頭、長焦鏡頭四大類。需要注意的是焦距的長短劃分并不是以焦距的絕對(duì)值為首要標(biāo)準(zhǔn),而是以像角的大小為主要區(qū)分依據(jù),所以當(dāng)靶面的大小不等時(shí),其標(biāo)準(zhǔn)鏡頭的焦距大小也不同。變焦鏡頭上都有變焦環(huán),調(diào)節(jié)該環(huán)可以使鏡頭的焦距值在預(yù)定范圍內(nèi)靈活改變。變焦距鏡頭最長焦距值和最短焦距值的比值稱為該鏡頭的變焦倍率。變焦鏡頭有可分為手動(dòng)變焦和電動(dòng)變焦兩大類。
變焦鏡頭由于具有可連續(xù)改變焦距值的特點(diǎn),在需要經(jīng)常改變攝影視場(chǎng)的情況下非常方便使用,所以在攝影領(lǐng)域應(yīng)用非常廣泛。但由于變焦距鏡頭的透鏡片數(shù)多、結(jié)構(gòu)復(fù)雜,所以最大相對(duì)孔徑不能做得太大,致使圖像亮度較低、圖像質(zhì)量變差,同時(shí)在設(shè)計(jì)中也很難針對(duì)各種焦距、各種調(diào)焦距離做像差校正,所以其成像質(zhì)量無法和同檔次的定焦距鏡頭相比。
變焦距鏡頭
定焦距鏡頭
手動(dòng)變焦 電動(dòng)變焦
魚眼鏡頭 短焦鏡頭 標(biāo)準(zhǔn)鏡頭 長焦鏡頭
實(shí)際中常用的鏡頭的焦距是從4毫米到300毫米的范圍內(nèi)有很多的等級(jí),如何選擇合適焦距的鏡頭是在機(jī)器視覺系統(tǒng)設(shè)計(jì)時(shí)要考慮的一個(gè)主要問題。光學(xué)鏡頭的成像規(guī)律可以根據(jù)兩個(gè)基本成像公式牛頓公式和高斯公式來推導(dǎo),對(duì)于機(jī)器視覺系統(tǒng)的常見設(shè)計(jì)模型,我們一般是根據(jù)成像的放大率和物距這兩個(gè)條件來選擇合適焦距的鏡頭的,在此給出一組實(shí)用的計(jì)算公式:
放大率:m=h’/h=L’/L
物距:L = f(1+1/m)
像距:L’= f(1+m)
焦距:f = L/(1+1/m)物高:h = h’/m = h’(L-f)/f
像高:h’ = mh = h(L’-f)/f
根據(jù)鏡頭接口類型劃分
鏡頭和攝像機(jī)之間的接口有許多不同的類型,工業(yè)攝像機(jī)常用的包括C接口、CS接口、F接口、V接口、T2接口、徠卡接口、M42接口、M50接口等。接口類型的不同和鏡頭性能及質(zhì)量并無直接關(guān)系,只是接口方式的不同,一般可以也找到各種常用接口之間的轉(zhuǎn)接口。
· C接口和CS接口是工業(yè)攝像機(jī)最常見的國際標(biāo)準(zhǔn)接口,為1英寸-32UN英制螺紋連接口,C型接口和CS型接口的螺紋連接是一樣的,區(qū)別在于C型接口的后截距為17.5mm,CS型接口的后截距為12.5mm。所以CS型接口的攝像機(jī)可以和C口及CS口的鏡頭連接使用,只是使用C口鏡頭時(shí)需要加一個(gè)5mm的接圈;C型接口的攝像機(jī)不能用CS口的鏡頭。
· F接口鏡頭是尼康鏡頭的接口標(biāo)準(zhǔn),所以又稱尼康口,也是工業(yè)攝像機(jī)中常用的類型,一般攝像機(jī)靶面大于1英寸時(shí)需用F口的鏡頭。
· V接口鏡頭是著名的專業(yè)鏡頭品牌施奈德鏡頭所主要使用的標(biāo)準(zhǔn),一般也用于攝像機(jī)靶面較大或特殊用途的鏡頭。
特殊用途的鏡頭
· 顯微鏡頭(Micro),一般是指成像比例大于10:1的拍攝系統(tǒng)所用,但由于現(xiàn)在的攝像機(jī)的像元尺寸已經(jīng)做到3微米以內(nèi),所以一般成像比例大于2:1時(shí)也會(huì)選用顯微鏡頭。
· 微距鏡頭(Macro),一般是指成像比例為2:1~1:4的范圍內(nèi)的特殊設(shè)計(jì)的鏡頭。在對(duì)圖像質(zhì)量要求不是很高的情況下,一般可采用在鏡頭和攝像機(jī)之間加近攝接圈的方式或在鏡頭前加近拍鏡的方式達(dá)到放大成像的效果。
· 遠(yuǎn)心鏡頭(Telecentric),主要是為糾正傳統(tǒng)鏡頭的視差而特殊設(shè)計(jì)的鏡頭,它可以在一定的物距范圍內(nèi),使得到的圖像放大倍率不會(huì)隨物距的變化而變化,這對(duì)被測(cè)物不在同一物面上的情況是非常重要的應(yīng)用。
遠(yuǎn)心鏡頭的應(yīng)用實(shí)例
· 紫外鏡頭(Ultraviolet)和紅外鏡頭(Infrared),一般鏡頭是針對(duì)可見光范圍內(nèi)的使用設(shè)計(jì)的,由于同一光學(xué)系統(tǒng)對(duì)不同波長的光線折射率的不同,導(dǎo)致同一點(diǎn)發(fā)出的不同波長的光成像時(shí)不能會(huì)聚成一點(diǎn),產(chǎn)生色差。常用鏡頭的消色差設(shè)計(jì)也是針對(duì)可見光范圍的,紫外鏡頭和紅外鏡頭即是專門針對(duì)紫外線和紅外線進(jìn)行設(shè)計(jì)的鏡頭。
鏡頭的主要參數(shù)及對(duì)成像質(zhì)量的影響
鏡頭分不同類型,但即使對(duì)于同一類型的鏡頭,其成像質(zhì)量也有著很大的差異,這主要是由于材質(zhì)、加工精度和鏡片結(jié)構(gòu)的不同等因素造成的,同時(shí)也導(dǎo)致不同檔次的鏡頭價(jià)格從幾百元到幾萬元的巨大差異。比較著名的如四片三組式天塞鏡頭、六片四組式雙高斯鏡頭。對(duì)于鏡頭設(shè)計(jì)及生產(chǎn)廠家,一般用光學(xué)傳遞函數(shù)OTF(Optical Transfer Function)來綜合評(píng)價(jià)鏡頭成像質(zhì)量,光學(xué)系統(tǒng)傳遞的是亮度沿空間分布的信息,光學(xué)系統(tǒng)在傳遞被攝景物信息時(shí),被傳遞之各空間頻率的正弦波信號(hào),其調(diào)制度和位相在成實(shí)際像時(shí)的變化,均為空間頻率的函數(shù),此函數(shù)稱為光學(xué)傳遞函數(shù)。OTF一般由調(diào)制傳遞函數(shù)MTF(Modulation Transfer Function)與位相傳遞函數(shù)PTF(Phase Transfer Function )兩部分組成。
像差是影響圖像質(zhì)量的重要方面,常見的像差有如下六種:
· 球差:由主軸上某一物點(diǎn)向光學(xué)系統(tǒng)發(fā)出的單色圓錐形光束,經(jīng)該光學(xué)系列折射后,若原光束不同孔徑角的各光線,不能交于主軸上的同一位置,以至在主軸上的理想像平面處,形成一彌散光斑(俗稱模糊圈),則此光學(xué)系統(tǒng)的成像誤差稱為球差。
· 慧差:由位于主軸外的某一軸外物點(diǎn),向光學(xué)系統(tǒng)發(fā)出的單色圓錐形光束,經(jīng)該光學(xué)系列折射后,若在理想像平面處不能結(jié)成清晰點(diǎn),而是結(jié)成拖著明亮尾巴的慧星形光斑,則此光學(xué)系統(tǒng)的成像誤差稱為慧差。
· 像散:由位于主軸外的某一軸外物點(diǎn),向光學(xué)系統(tǒng)發(fā)出的斜射單色圓錐形光束,經(jīng)該光學(xué)系列折射后,不能結(jié)成一個(gè)清晰像點(diǎn),而只能結(jié)成一彌散光斑,則此光學(xué)系統(tǒng)的成像誤差稱為像散。
· 場(chǎng)曲:垂直于主軸的平面物體經(jīng)光學(xué)系統(tǒng)所結(jié)成的清晰影像,若不在一垂直于主軸的像平面內(nèi),而在一以主軸為對(duì)稱的彎曲表面上,即最佳像面為一曲面,則此光學(xué)系統(tǒng)的成像誤差稱為場(chǎng)曲。當(dāng)調(diào)焦至畫面中央處的影像清晰時(shí),畫面四周的影像模糊;而當(dāng)調(diào)焦至畫面四周處的影像清晰時(shí),畫面中央處的影像又開始模糊。
· 色差:由白色物體向光學(xué)系統(tǒng)發(fā)出一束白光,經(jīng)光學(xué)系統(tǒng)折射后,各色光不能會(huì)聚于一點(diǎn)上,而形成一彩色像斑,稱為色差。色差產(chǎn)生的原因是同一光學(xué)玻璃對(duì)不同波長的光線的折射率不同,短波光折射率大,長波光折射率小。
· 畸變:被攝物平面內(nèi)的主軸外直線,經(jīng)光學(xué)系統(tǒng)成像后變?yōu)榍€,則此光學(xué)系統(tǒng)的成像誤差稱為畸變。畸變像差只影響影像的幾何形狀,而不影響影像的清晰度。這是畸變與球差、慧差、像散、場(chǎng)曲之間的根本區(qū)別。
我們?cè)谠u(píng)價(jià)鏡頭質(zhì)量時(shí)一般還會(huì)從分辨率、明銳度和景深等幾個(gè)實(shí)用參數(shù)判斷:
1. 分辨率(Resolution):又稱鑒別率、解像力,指鏡頭清晰分辨被攝景物纖維細(xì)節(jié)的能力,制約鏡頭分辨率的原因是光的衍射現(xiàn)象,即衍射光斑(愛里斑)。分辨率的單位是“線對(duì)/毫米“ (lp/mm)。
2. 明銳度(Acutance):也稱對(duì)比度,是指圖像中最亮和最暗的部分的對(duì)比度。
3. 景深(DOF):在景物空間中,位于調(diào)焦物平面前后一定距離內(nèi)的景物,還能夠結(jié)成相對(duì)清晰的影像。上述位于調(diào)焦物平面前后的能結(jié)成相對(duì)清晰影像的景物間之縱深距離,也就是能在實(shí)際像平面上獲得相對(duì)清晰影像的景物空間深度范圍,稱為景深。
4. 最大相對(duì)孔徑與光圈系數(shù):相對(duì)孔徑,是指該鏡頭的入射光孔直徑(用D表示)與焦距(用f表示)之比,即:相對(duì)孔徑=D/ f 。相對(duì)孔徑的倒數(shù)稱為光圈系數(shù)(aperture scale),又稱為f/制光圈系數(shù)或光孔號(hào)碼。一般鏡頭的相對(duì)孔徑是可以調(diào)節(jié)的,其最大相對(duì)孔徑或光圈系數(shù)往往標(biāo)示在鏡頭上,如1:1.2或f/1.2 。如果拍攝現(xiàn)場(chǎng)的光線較暗或曝光時(shí)間很短,則需要盡量選擇最大相對(duì)孔徑較大的鏡頭。
鏡頭各參數(shù)間的相互影響關(guān)系
一個(gè)好的鏡頭,在分辨率、明銳度、景深等方面都有很好的體現(xiàn),對(duì)各種像差的校正也比較好,但同時(shí)其價(jià)格也會(huì)幾倍甚至上百倍的提高。如果我們掌握一些規(guī)律和經(jīng)驗(yàn),就可以使用同檔次的鏡頭達(dá)到更好的效果。
1. 焦距大小的影響情況
· 焦距越小,景深越大;
· 焦距越小,畸變?cè)酱螅?/p>
· 焦距越小,漸暈現(xiàn)象越嚴(yán)重,使像差邊緣的照度降低;
2. 光圈大小的影響情況
光圈越大,圖像亮度越高;
· 光圈越大,景深越小;
· 光圈越大,分辨率越高;
3. 像場(chǎng)中央與邊緣
· 一般像場(chǎng)中心較邊緣分辨率高
· 一般像場(chǎng)中心較邊緣光場(chǎng)照度高
4. 光波長度的影響
在相同的攝像機(jī)及鏡頭參數(shù)條件下,照明光源的光波波長越短,得到的圖像的分辨力越高。所以在需要精密尺寸及位置測(cè)量的視覺系統(tǒng)中,盡量采用短波長的單色光作為照明光源,對(duì)提高系統(tǒng)精度有很大的作用。
-
傳感器
+關(guān)注
關(guān)注
2562文章
52560瀏覽量
763677 -
機(jī)器視覺
+關(guān)注
關(guān)注
163文章
4510瀏覽量
122250 -
CMOS攝像機(jī)
+關(guān)注
關(guān)注
0文章
4瀏覽量
6107
原文標(biāo)題:機(jī)器視覺檢測(cè)系統(tǒng)中的主要參數(shù)詳解
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
機(jī)器視覺系統(tǒng)應(yīng)用成為檢測(cè)行業(yè)主導(dǎo)潮流
機(jī)器視覺算法與應(yīng)用(雙語版)
這些機(jī)器人視覺系統(tǒng)些關(guān)鍵技術(shù),你必須要知道
在選擇機(jī)器視覺系統(tǒng)中的工控機(jī)時(shí),應(yīng)注意什么?
惠州機(jī)器視覺系統(tǒng)的工作步驟你了解嗎?
深圳工業(yè)機(jī)器視覺系統(tǒng)有哪些組成部分?
四元數(shù)數(shù)控:深圳機(jī)器視覺系統(tǒng)工控機(jī)有什么要注意?
四元數(shù)數(shù)控:深圳機(jī)器視覺系統(tǒng)由什么部分組成?
四元數(shù)數(shù)控:深圳機(jī)器視覺系統(tǒng)光源有什么工作過程?
四元數(shù)數(shù)控:深圳機(jī)器視覺系統(tǒng)怎么選擇合適的?
移動(dòng)機(jī)器人視覺系統(tǒng)與攝像機(jī)標(biāo)定
視覺系統(tǒng)的構(gòu)成 機(jī)器視覺中常用的接口有哪些
機(jī)器視覺的攝像機(jī)標(biāo)定技術(shù)你知道多少?
機(jī)器視覺系統(tǒng)中常用攝像機(jī)的分類







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論