") PFLD:簡單、快速、超高精度人臉特征點(diǎn)檢測算法
PFLD:簡單、快速、超高精度人臉特征點(diǎn)檢測算法

什么樣的算法才是好算法?
真正能實(shí)用的算法才是最好的算法!
這需要實(shí)現(xiàn)三個(gè)目標(biāo):精度高、速度快、模型小!
近期,arXiv新發(fā)布的文章《PFLD: A Practical Facial Landmark Detector》,則是實(shí)用人臉特征點(diǎn)檢測算法的典范。
PFLD算法,目前主流數(shù)據(jù)集上達(dá)到最高精度、ARM安卓機(jī)140fps,模型大小僅2.1M!
這篇新出的論文,必將成為人臉特征點(diǎn)檢測領(lǐng)域的重要文獻(xiàn),今天我們就一起來探究一下,PFLD算法到底有什么黑科技。
作者信息:

作者分別來自天津大學(xué)、武漢大學(xué)、騰訊AI實(shí)驗(yàn)室、美國天普大學(xué)。
感謝各位大牛!
人臉特征點(diǎn)檢測的挑戰(zhàn)
作者首先從算法實(shí)用性角度討論了人臉特征點(diǎn)檢測問題的面臨的挑戰(zhàn)。
-
Challenge #1 - Local Variation
人臉表情變化很大,真實(shí)環(huán)境光照復(fù)雜,而且現(xiàn)實(shí)中大量存在人臉局部被遮擋的情況等。
-
Challenge #2 - Global Variation
人臉是 3D 的,位姿變化多樣,另外因拍攝設(shè)備和環(huán)境影響,成像質(zhì)量也有好有壞。
-
Challenge #3 - Data Imbalance
現(xiàn)有訓(xùn)練樣本各個(gè)類別存在不平衡的問題。
-
Challenge #4 - Model Efficiency
在計(jì)算受限的設(shè)備比如手機(jī)終端,必須要考慮計(jì)算速度和模型文件大小問題。
算法思想
作者使用的網(wǎng)絡(luò)結(jié)構(gòu)如下:

其中,
黃色曲線包圍的是主網(wǎng)絡(luò),用于預(yù)測特征點(diǎn)的位置;
綠色曲線包圍的部分為輔網(wǎng)絡(luò),在訓(xùn)練時(shí)預(yù)測人臉姿態(tài)(有文獻(xiàn)表明給網(wǎng)絡(luò)加這個(gè)輔助任務(wù)可以提高定位精度,具體參考原論文),這部分在測試時(shí)不需要。
作者主要用兩種方法,解決上述問題。
對于上述影響精度的挑戰(zhàn),修改loss函數(shù)在訓(xùn)練時(shí)關(guān)注那些稀有樣本,而提高計(jì)算速度和減小模型size則是使用輕量級模型。
-
Loss函數(shù)設(shè)計(jì)
Loss函數(shù)用于神經(jīng)網(wǎng)絡(luò)在每次訓(xùn)練時(shí)預(yù)測的形狀和標(biāo)注形狀的誤差。
考慮到樣本的不平衡,作者希望能對那些稀有樣本賦予更高的權(quán)重,這種加權(quán)的Loss函數(shù)被表達(dá)為:

M為樣本個(gè)數(shù),N為特征點(diǎn)個(gè)數(shù),Yn為不同的權(quán)重,|| * ||為特征點(diǎn)的距離度量(L1或L2距離)。(以Y代替公式里的希臘字母)
進(jìn)一步細(xì)化Yn:

其中

即為最終的樣本權(quán)重。
K=3,這一項(xiàng)代表著人臉姿態(tài)的三個(gè)維度,即yaw, pitch, roll 角度,可見角度越高,權(quán)重越大。
C為不同的人臉類別數(shù),作者將人臉分成多個(gè)類別,比如側(cè)臉、正臉、抬頭、低頭、表情、遮擋等,w為與類別對應(yīng)的給定權(quán)重,如果某類別樣本少則給定權(quán)重大。
-
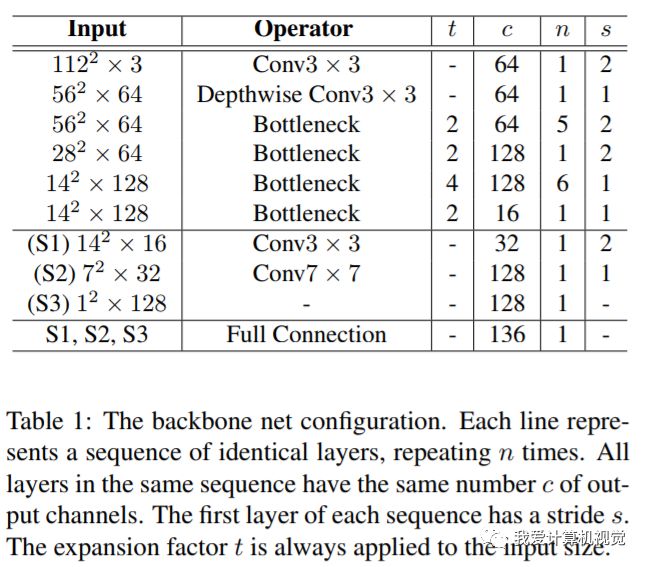
主網(wǎng)絡(luò)
作者使用輕量級的MobileNet,其參數(shù)如下:
-
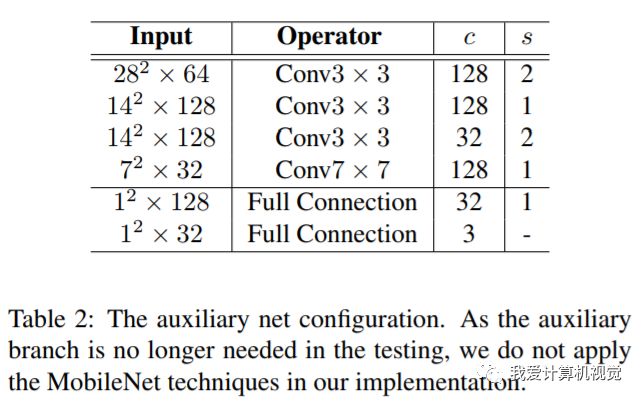
輔網(wǎng)絡(luò)
參數(shù)如下:
實(shí)驗(yàn)結(jié)果
作者在主流人臉特征點(diǎn)數(shù)據(jù)集300W,AFLW上測試了精度,盡管看起來上述模型很簡單,但超過了以往文獻(xiàn)的最高精度!
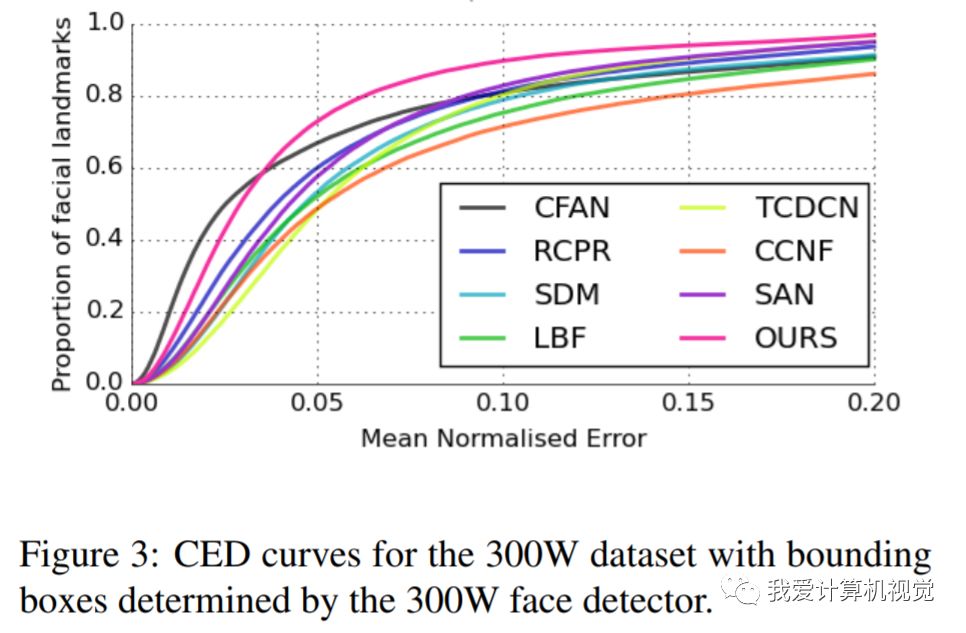
下圖是在300W上的CED,完美將其他算法的曲線壓在下面。
下圖為在300W數(shù)據(jù)集上不同評價(jià)標(biāo)準(zhǔn)IPNIOP精度比較結(jié)果,依然是最棒的。
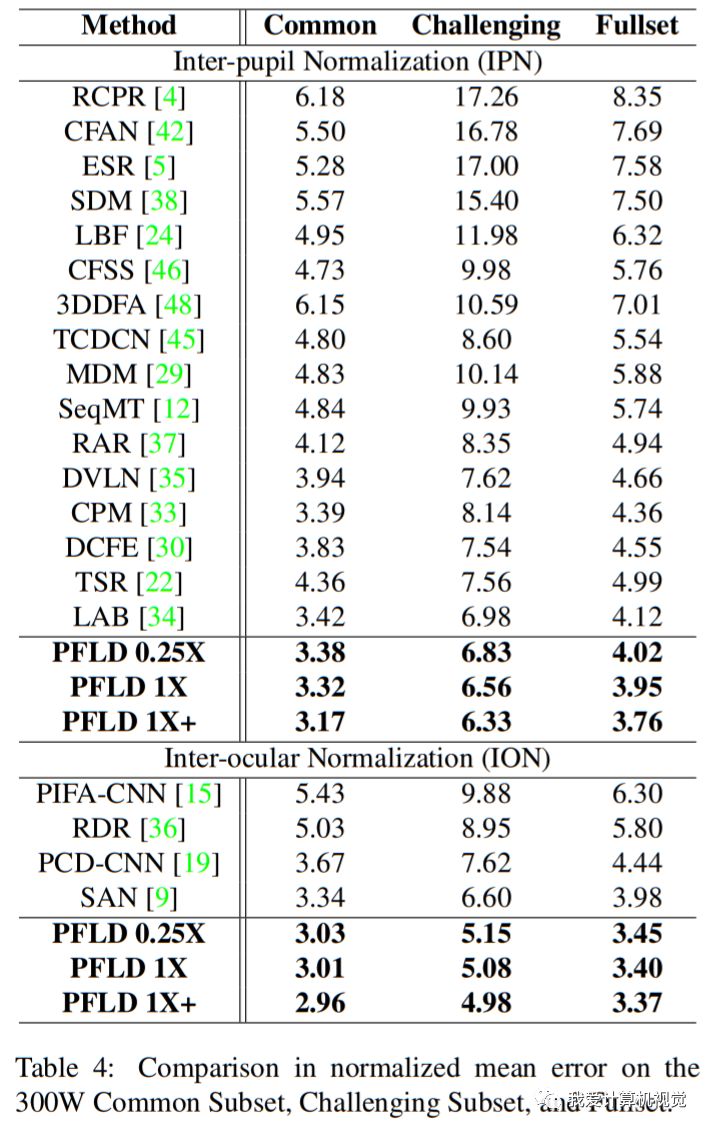
其中PFLD 1X是標(biāo)準(zhǔn)網(wǎng)絡(luò),PFLD 0.25X是MobileNet blocks width 參數(shù)設(shè)為0.25的壓縮網(wǎng)絡(luò),PFLD 1X+是在WFLW數(shù)據(jù)集上預(yù)訓(xùn)練的網(wǎng)絡(luò)。
值得一提的是表格中LAB算法,是CVPR2018上出現(xiàn)的優(yōu)秀算法,之前一直是state-of-the-art。感興趣的朋友可以參考52CV當(dāng)時(shí)的報(bào)道:重磅!清華&商湯開源CVPR2018超高精度人臉對齊算法LAB 。
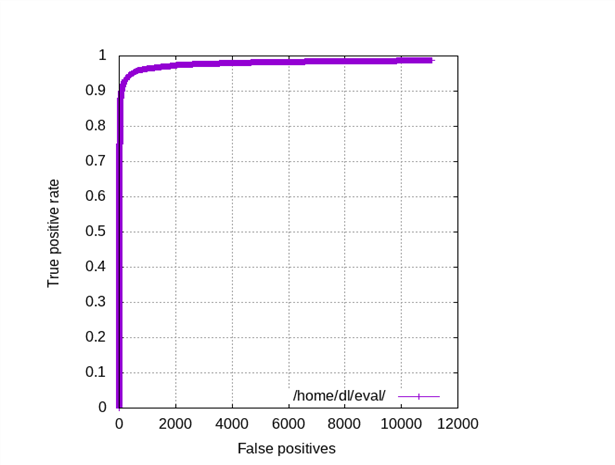
下圖是該算法在AFLW數(shù)據(jù)集上與其他算法的精度比較:

同樣是達(dá)到了新高度!
下面來看一下算法處理速度和模型大小,圖中C代表i7-6700K CPU,G代表080 Ti GPU,G*代表Titan X GPU,A代表移動(dòng)平臺Qualcomm ARM 845處理器。

PFDL同樣是異乎優(yōu)秀!與精度差別很小的LAB算法相比,CPU上的速度提高了2000倍!
下面是一些特征點(diǎn)檢測示例,盡管很多樣本難度很大,但PFLD依然給出了可以接受的結(jié)果。
作者沒有開源代碼,但給出了Android應(yīng)用 APK 和Android工程(算法封裝在bin文件里)。
這個(gè)算法實(shí)在是太吸引人了,你是不是也想試一下呢?
-
人臉識別
+關(guān)注
關(guān)注
77文章
4081瀏覽量
84204
原文標(biāo)題:PFLD:簡單、快速、超高精度人臉特征點(diǎn)檢測算法
文章出處:【微信號:rgznai100,微信公眾號:rgznai100】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
三坐標(biāo)微米級測量精度,高精度檢測液壓支架導(dǎo)向套的幾何公差尺寸

軒轅智駕紅外目標(biāo)檢測算法在汽車領(lǐng)域的應(yīng)用
【方案】超高精度和穩(wěn)定性的雷達(dá)液位計(jì)方案
隧道施工安全新防線:UWB高精度人員定位系統(tǒng)
遠(yuǎn)心工業(yè)鏡頭:高精度尺寸檢測、定位應(yīng)用的理想選擇
【米爾RK3576開發(fā)板評測】+項(xiàng)目名稱RetinaFace人臉檢測
人臉識別技術(shù)的算法原理解析
《DNK210使用指南 -CanMV版 V1.0》第四十四章 人臉68關(guān)鍵點(diǎn)檢測實(shí)驗(yàn)
北斗高精度人員定位系統(tǒng)是什么?一文弄懂

室外高精度人員定位系統(tǒng)解決方案

室內(nèi)高精度人員定位系統(tǒng)解決方案
谷歌開發(fā)出高精度人工智能天氣模擬器
旗晟機(jī)器人環(huán)境檢測算法有哪些?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論