") 神經(jīng)網(wǎng)絡(luò)發(fā)展的重要性
神經(jīng)網(wǎng)絡(luò)發(fā)展的重要性
摘要:任何人工智能的難題都可以被解決。唯一能證明這一論斷成立的是這樣一個(gè)事實(shí):自然界通過(guò)進(jìn)化已經(jīng)解決了這些難題。但在20世紀(jì)50年代就已經(jīng)存在各種暗示,如果AI研究者能夠選擇完全不同于符號(hào)處理的方式,計(jì)算機(jī)會(huì)如何表現(xiàn)出智能行為。
第一條暗示是,我們的大腦是強(qiáng)大的模式識(shí)別器。我們的視覺(jué)系統(tǒng)可以在1/10秒內(nèi)識(shí)別混亂場(chǎng)景中的對(duì)象,即使我們可能從未見(jiàn)過(guò)那個(gè)特定的對(duì)象,也不論該對(duì)象在什么位置,多大尺寸,以什么角度面對(duì)我們。簡(jiǎn)而言之,我們的視覺(jué)系統(tǒng)就像一臺(tái)以“識(shí)別對(duì)象”作為單一指令的計(jì)算機(jī)。
第二條暗示是,我們的大腦可以通過(guò)練習(xí)來(lái)學(xué)會(huì)如何執(zhí)行若干艱巨的任務(wù),比如彈鋼琴、掌握物理學(xué)知識(shí)。大自然使用通用的學(xué)習(xí)方法來(lái)解決特殊的問(wèn)題,而人類則是頂尖的學(xué)習(xí)者。這是我們的特殊能力。我們大腦皮層的結(jié)構(gòu)整體上是相似的,并且我們所有的感受系統(tǒng)和運(yùn)動(dòng)系統(tǒng)都有深度學(xué)習(xí)網(wǎng)絡(luò)。
第三條暗示是,我們的大腦并沒(méi)有充斥著邏輯或規(guī)則。當(dāng)然,我們可以學(xué)習(xí)邏輯思維或遵守規(guī)則,但必須要經(jīng)過(guò)大量的訓(xùn)練,而我們當(dāng)中的大多數(shù)人對(duì)此并不在行。這一點(diǎn)可以通過(guò)人們?cè)谝粋€(gè)叫作“華生選擇任務(wù)”(Wason selection task)的邏輯謎題上的典型表現(xiàn)來(lái)進(jìn)行說(shuō)明(見(jiàn)圖3–1)。
圖3–1
圖3-1這四張卡片,每張都是一面有數(shù)字,另一面涂滿了顏色。要測(cè)試以下命題為真:一張卡片在一面顯示為偶數(shù),那它的另一面就是紅色的。你需要翻哪(幾)張牌呢?圖片來(lái)源:“華生選擇任務(wù)”,維基百科。
正確的選擇是正面為數(shù)字“8”,背面為棕色的卡片。在最初的研究中,只有10%的受試者給出了正確的答案。但是,當(dāng)給這項(xiàng)邏輯測(cè)試加上了熟悉的背景信息時(shí),大多數(shù)受試者都能很快找出正確答案(見(jiàn)圖3–2)。
圖3–2
推理似乎是基于特定領(lǐng)域的,我們對(duì)該領(lǐng)域越熟悉,就越容易解決其中的問(wèn)題。經(jīng)驗(yàn)使得在一個(gè)領(lǐng)域內(nèi)進(jìn)行推理變得更容易,因?yàn)槲覀兛梢杂靡延械睦觼?lái)下意識(shí)地得到解決方案。例如,在物理學(xué)中,我們通過(guò)解決各種問(wèn)題,而不是通過(guò)背誦公式,來(lái)學(xué)習(xí)電磁學(xué)領(lǐng)域的知識(shí)。如果人類的智能是完全基于邏輯的,那么它應(yīng)該是跨領(lǐng)域的通用智能,但事實(shí)并非如此。
圖3-2每張卡片都是一面有一個(gè)年齡數(shù)字,另一面印著一種飲料。需要翻哪(幾)張牌才能檢驗(yàn)這條法律:如果你正在喝酒,那說(shuō)明你一定超過(guò)18歲了?圖片來(lái)源:“華生選擇任務(wù)”,維基百科。
第四條暗示是,我們的大腦充滿了數(shù)百億個(gè)小小的神經(jīng)元,每時(shí)每刻都在互相傳遞信息。這表明,要解決人工智能中的難題,我們應(yīng)該研究具有大規(guī)模并行體系結(jié)構(gòu)的計(jì)算機(jī),而不是那些具有馮·諾依曼數(shù)字體系結(jié)構(gòu),每次只能獲取和執(zhí)行一個(gè)數(shù)據(jù)或指令的計(jì)算機(jī)。是的,圖靈機(jī)在被給予足夠內(nèi)存和時(shí)間的條件下,的確可以計(jì)算任何可計(jì)算的函數(shù),但自然界必須實(shí)時(shí)解決問(wèn)題。要做到這一點(diǎn),它利用了大腦的神經(jīng)網(wǎng)絡(luò),就像地球上最強(qiáng)大的計(jì)算機(jī)一樣,它們具有大量的并行處理器。只有能有效運(yùn)行的算法,最終才能在自然選擇中勝出。
深度學(xué)習(xí)的起點(diǎn)
20世紀(jì)五六十年代,在諾伯特·維納(Norbert Wiener)提出基于機(jī)器和生物中的通信和控制系統(tǒng)的控制論之后不久,學(xué)界對(duì)自組織系統(tǒng)開(kāi)始產(chǎn)生了濃厚的興趣。而其中一個(gè)獨(dú)創(chuàng)性產(chǎn)物便是由奧利弗·塞弗里奇(Oliver Selfridge) 創(chuàng)造的Pandemonium(鬼域)。這是一個(gè)圖案識(shí)別設(shè)備,其中進(jìn)行特征檢測(cè)的“惡魔”通過(guò)互相競(jìng)爭(zhēng),來(lái)爭(zhēng)取代表圖像中對(duì)象的權(quán)利(深度學(xué)習(xí)的隱喻,見(jiàn)圖3–3)。斯坦福大學(xué)的伯納德·威德羅(Bernard Widrow)和他的學(xué)生泰德·霍夫(Ted Hoff)發(fā)明了LMS(最小均方)學(xué)習(xí)算法,它與其后繼算法一起被廣泛用于自適應(yīng)信號(hào)處理,例如噪聲消除、財(cái)務(wù)預(yù)測(cè)等應(yīng)用。在這里, 我將重點(diǎn)關(guān)注一位先驅(qū)弗蘭克·羅森布拉特(Frank Rosenblatt)(圖3–4),他發(fā)明的感知器是深度學(xué)習(xí)的前身。
圖3-3 Pandemonium。奧利弗·塞弗里奇認(rèn)為,大腦中有惡魔負(fù)責(zé)從感官輸入中先后提取更復(fù)雜的特征和抽象概念,從而做出決定。如果每個(gè)級(jí)別的惡魔與前一個(gè)級(jí)別的輸入相匹配,則會(huì)激動(dòng)不已。做決定的惡魔需要衡量所有信息傳遞者的興奮程度和重要性。這種形式的證據(jù)評(píng)估是對(duì)當(dāng)前多層次深度學(xué)習(xí)網(wǎng)絡(luò)的隱喻。圖片來(lái)源:Peter H. Lindsay and Donald A. Norman, Human Information Processing: An Introduction to Psychology, 2nded. (New York: Academic Press, 1977),圖3-1。維基共享資源:https://commons.wikimedia.org/wiki/File:Pande.jpg。
圖3-4深思中的康奈爾大學(xué)教授弗蘭克·羅森布拉特,他發(fā)明了感知器。作為深度學(xué)習(xí)網(wǎng)絡(luò)的早期雛形,感知器是能夠?qū)D像進(jìn)行分類的簡(jiǎn)易學(xué)習(xí)算法。圖中文章是1958年7月8日在《紐約時(shí)報(bào)》上發(fā)表的一篇來(lái)自合眾國(guó)際社(UPI)的報(bào)道。感知器在1959年完成時(shí)預(yù)計(jì)花費(fèi)了10萬(wàn)美元,相當(dāng)于今天的100萬(wàn)美元。IBM 704計(jì)算機(jī)在1958年價(jià)值200萬(wàn)美元,相當(dāng)于現(xiàn)在的2000萬(wàn)美元,可以實(shí)現(xiàn)每秒12000次的乘法運(yùn)算,這在當(dāng)時(shí)已經(jīng)是極快的速度了。不過(guò)相比之下,現(xiàn)在價(jià)格要低得多的三星Galaxy S 6手機(jī)每秒可以執(zhí)行340億次操作,速度要快100萬(wàn)倍以上。圖片來(lái)源:George Nagy。
從樣本中學(xué)習(xí)
盡管我們對(duì)大腦功能缺乏足夠的了解,但神經(jīng)網(wǎng)絡(luò)的AI先驅(qū)們依然依靠著神經(jīng)元的繪圖以及它們相互連接的方式,進(jìn)行著艱難的摸索。康奈爾大學(xué)的弗蘭克·羅森布拉特是最早模仿人體自動(dòng)圖案識(shí)別視覺(jué)系統(tǒng)架構(gòu)的人之一。他發(fā)明了一種看似簡(jiǎn)單的網(wǎng)絡(luò)感知器(perceptron),這種學(xué)習(xí)算法可以學(xué)習(xí)如何將圖案進(jìn)行分類,例如識(shí)別字母表中的不同字母。算法是為了實(shí)現(xiàn)特定目標(biāo)而按步驟執(zhí)行的過(guò)程,就像烘焙蛋糕的食譜一樣。
如果你了解了感知器如何學(xué)習(xí)圖案識(shí)別的基本原則,那么你在理解深度學(xué)習(xí)工作原理的路上已經(jīng)成功了一半。感知器的目標(biāo)是確定輸入的圖案是否屬于圖像中的某一類別(比如貓)。方框3.1解釋了感知器的輸入如何通過(guò)一組權(quán)重,來(lái)實(shí)現(xiàn)輸入單元到輸出單元的轉(zhuǎn)換。權(quán)重是對(duì)每一次輸入對(duì)輸出單元做出的最終決定所產(chǎn)生影響的度量,但是我們?nèi)绾握业揭唤M可以將輸入進(jìn)行正確分類的權(quán)重呢?
工程師解決這個(gè)問(wèn)題的傳統(tǒng)方法,是根據(jù)分析或特定程序來(lái)手動(dòng)設(shè)定權(quán)重。這需要耗費(fèi)大量人力,而且往往依賴于直覺(jué)和工程方法。另一種方法則是使用一種從樣本中學(xué)習(xí)的自動(dòng)過(guò)程,和我們認(rèn)識(shí)世界上的對(duì)象的方法一樣。需要很多樣本來(lái)訓(xùn)練感知器,包括不屬于該類別的反面樣本,特別是和目標(biāo)特征相似的,例如,如果識(shí)別目標(biāo)是貓,那么狗就是一個(gè)相似的反面樣本。這些樣本被逐個(gè)傳遞給感知器,如果出現(xiàn)分類錯(cuò)誤,算法就會(huì)自動(dòng)對(duì)權(quán)重進(jìn)行校正。
這種感知器學(xué)習(xí)算法的美妙之處在于,如果已經(jīng)存在這樣一組權(quán)重,并且有足夠數(shù)量的樣本,那么它肯定能自動(dòng)地找到一組合適的權(quán)重。在提供了訓(xùn)練集中的每個(gè)樣本,并且將輸出與正確答案進(jìn)行比較后,感知器會(huì)進(jìn)行遞進(jìn)式的學(xué)習(xí)。如果答案是正確的,那么權(quán)重就不會(huì)發(fā)生變化。但如果答案不正確(0被誤判成了1,或1被誤判成了0),權(quán)重就會(huì)被略微調(diào)整,以便下一次收到相同的輸入時(shí),它會(huì)更接近正確答案(見(jiàn)方框3.1)。這種漸進(jìn)的變化很重要,這樣一來(lái),權(quán)重就能接收來(lái)自所有訓(xùn)練樣本的影響,而不僅僅是最后一個(gè)。
如果對(duì)感知器學(xué)習(xí)的這種解釋還不夠清楚,我們還可以通過(guò)另一種更簡(jiǎn)潔的幾何方法,來(lái)理解感知器如何學(xué)習(xí)對(duì)輸入進(jìn)行分類。對(duì)于只有兩個(gè)輸入單元的特殊情況,可以在二維圖上用點(diǎn)來(lái)表示輸入樣本。每個(gè)輸入都是圖中的一個(gè)點(diǎn),而網(wǎng)絡(luò)中的兩個(gè)權(quán)重則確定了一條直線。感知器學(xué)習(xí)的目標(biāo)是移動(dòng)這條線,以便清楚地區(qū)分正負(fù)樣本(見(jiàn)圖3–5)。對(duì)于有三個(gè)輸入單元的情況,輸入空間是三維的,感知器會(huì)指定一個(gè)平面來(lái)分隔正負(fù)訓(xùn)練樣本。在一般的情況下,即使輸入空間的維度可能相當(dāng)高且無(wú)法可視化,同樣的原則依然成立。
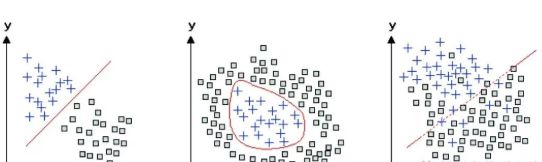
圖3-5關(guān)于感知器如何區(qū)分兩個(gè)對(duì)象類別的幾何解釋。這些對(duì)象有兩個(gè)特征,例如尺寸和亮度,它們依據(jù)各自的坐標(biāo)值(x,y)被繪制在每張圖上。左邊圖中的兩種對(duì)象(加號(hào)和正方形)可以通過(guò)它們之間的直線分隔開(kāi);感知器能夠?qū)W習(xí)如何進(jìn)行這種區(qū)分。其他兩個(gè)圖中的兩種對(duì)象不能用直線隔開(kāi),但在中間的圖中,兩種對(duì)象可以用曲線分開(kāi)。而右側(cè)圖中的對(duì)象必須舍棄一些樣本才能分隔成兩種類型。如果有足夠的訓(xùn)練數(shù)據(jù),深度學(xué)習(xí)網(wǎng)絡(luò)就能夠?qū)W習(xí)如何對(duì)這三個(gè)圖中的類型進(jìn)行區(qū)分。
最終,如果解決方案是可行的,權(quán)重將不再變化,這意味著感知器已經(jīng)正確地將訓(xùn)練集中的所有樣本進(jìn)行了分類。但是,在所謂的“過(guò)度擬合”(overfitting)中,也可能沒(méi)有足夠的樣本,網(wǎng)絡(luò)僅僅記住了特定的樣本,而不能將結(jié)論推廣到新的樣本。為了避免過(guò)度擬合,關(guān)鍵是要有另一套樣本,稱為“測(cè)試集”(test set),它沒(méi)有被用于訓(xùn)練網(wǎng)絡(luò)。訓(xùn)練結(jié)束時(shí),在測(cè)試集上的分類表現(xiàn),就是對(duì)感知器是否能夠推廣到類別未知的新樣本的真實(shí)度量。泛化(generalization)是這里的關(guān)鍵概念。在現(xiàn)實(shí)生活中,我們幾乎不會(huì)在同樣的視角看到同一個(gè)對(duì)象,或者反復(fù)遇到同樣的場(chǎng)景,但如果我們能夠?qū)⒁郧暗慕?jīng)驗(yàn)泛化到新的視角或場(chǎng)景中, 我們就可以處理更多現(xiàn)實(shí)世界的問(wèn)題。
利用感知機(jī)區(qū)分性別
舉一個(gè)用感知器解決現(xiàn)實(shí)世界問(wèn)題的例子。想想如果去掉頭發(fā)、首飾和第二性征,比如男性比女性更為突起的喉結(jié),該如何區(qū)分男性和女性的面部。比阿特麗斯·哥倫布(Beatrice Golomb)是1990年我實(shí)驗(yàn)室里的一名博士后研究員,她利用一個(gè)數(shù)據(jù)庫(kù)中的大學(xué)生面部照片作為感知器的輸入,經(jīng)過(guò)訓(xùn)練的感知器能以81%的準(zhǔn)確度對(duì)面部的性別進(jìn)行分類(見(jiàn)圖3–6)。而對(duì)于感知器難以分類的面部,人類也同樣很難做出區(qū)分。我實(shí)驗(yàn)室的成員在同一組人的面部識(shí)別上達(dá)到了88%的平均準(zhǔn)確度。比阿特麗斯還訓(xùn)練了多層感知器,其準(zhǔn)確度達(dá)到了92%,9比我實(shí)驗(yàn)室的成員還要準(zhǔn)確。她在1991年的NIPS大會(huì)上發(fā)表的演講中總結(jié)道:“經(jīng)驗(yàn)可以提高性能,這表明實(shí)驗(yàn)室的研究人員需要花更多時(shí)間來(lái)進(jìn)行性別鑒定的工作。”她把她的多層感知器叫作“SEXNET”(性別網(wǎng)絡(luò))。在問(wèn)答環(huán)節(jié),有人問(wèn)是否可以使用SEXNET來(lái)檢測(cè)異裝癖者的面孔。“可以。”比阿特麗斯這樣回答。而NIPS大會(huì)的創(chuàng)始人愛(ài)德華·波斯納(Edward Posner)辯駁道:“那就應(yīng)該叫DRAGNET(法網(wǎng))。”
圖3-6這張臉屬于男性還是女性?人們通過(guò)訓(xùn)練感知器來(lái)辨別男性和女性的面孔。來(lái)自面部圖像(上圖)的像素乘以相應(yīng)的權(quán)重(下圖),并將該乘積的總和與閾值進(jìn)行比較。每個(gè)權(quán)重的大小被描繪為不同顏色像素的面積。正值的權(quán)重(白色)表現(xiàn)為男性,負(fù)值的權(quán)重(黑色)傾向于女性。鼻子寬度,鼻子和嘴之間區(qū)域的大小,以及眼睛區(qū)域周圍的圖像強(qiáng)度對(duì)于區(qū)分男性很重要,而嘴和顴骨周圍的圖像強(qiáng)度對(duì)于區(qū)分女性更重要。圖片來(lái)源:M. S. Gray,D. T. Lawrence,B. A. Golomband T.J.Sejnowski,“A Perceptron Reveals the Face of Sex,” Neural Computation 7 ( 1995 ):1160 - 1164,圖1。
區(qū)分男性與女性面部的工作有趣的一點(diǎn)是,雖然我們很擅長(zhǎng)做這種區(qū)分,卻無(wú)法確切地表述男女面部之間的差異。由于沒(méi)有單一特征是決定性的,因此這種模式識(shí)別問(wèn)題要依賴于將大量低級(jí)特征的證據(jù)結(jié)合起來(lái)。感知器的優(yōu)點(diǎn)在于,權(quán)重提供了對(duì)性別區(qū)分最有幫助的面部的線索。令人驚訝的是,人中(即鼻子和嘴唇之間的部分)是最顯著的特征,大多數(shù)男性人中的面積更大。眼睛周圍的區(qū)域(男性較大)和上頰(女性較大)對(duì)于性別分類也有著很高的信息價(jià)值。感知器會(huì)權(quán)衡來(lái)自所有這些位置的證據(jù)來(lái)做出決定,我們也是這樣來(lái)做判定的, 盡管我們可能無(wú)法描述出到底是怎么做到的。
1957年羅森布拉特對(duì)“感知器收斂定理”的證明是一個(gè)突破,他的演示令人印象深刻。在美國(guó)海軍研究辦公室(Office of Naval Research)的支持下,他搭建了一個(gè)以400個(gè)光電單元作為輸入的定制硬件模擬計(jì)算機(jī),其權(quán)重是由電機(jī)調(diào)整的可變電阻電位器。模擬信號(hào)隨著時(shí)間連續(xù)變化,就像黑膠唱片中的信號(hào)一樣。用一組圖片集(其中部分圖片中有坦克,另外一部分則沒(méi)有)進(jìn)行訓(xùn)練,羅森布拉特的感知器即使在新圖像中也能準(zhǔn)確識(shí)別坦克。這一成果經(jīng)《紐約時(shí)報(bào)》報(bào)道后引起了轟動(dòng)(見(jiàn)圖3–4)。
感知器激發(fā)了對(duì)高維空間中模式分離的美妙的數(shù)學(xué)分析。當(dāng)那些點(diǎn)存在于有數(shù)千個(gè)維度的空間中時(shí),我們就無(wú)法依賴在生活的三維空間里對(duì)點(diǎn)和點(diǎn)之間距離的直覺(jué)。俄羅斯數(shù)學(xué)家弗拉基米爾·瓦普尼克(Vladimir Vapnik)在這種分析的基礎(chǔ)上引入了一個(gè)分類器, 稱為“支持向量機(jī)”(Support Vector Machine),它將感知器泛化,并被大量用于機(jī)器學(xué)習(xí)。他找到了一種自動(dòng)尋找平面的方法,能夠最大限度地將兩個(gè)類別的點(diǎn)分開(kāi)(見(jiàn)圖3–5,線性)。這讓泛化對(duì)空間中數(shù)據(jù)點(diǎn)的測(cè)量誤差容忍度更大,再結(jié)合作為非線性擴(kuò)充的“內(nèi)核技巧”(kernel trick),支持向量機(jī)算法就成了機(jī)器學(xué)習(xí)中的重要支柱。
一個(gè)被低估的神經(jīng)網(wǎng)路
但是有一個(gè)限制,使得感知器的研究存在問(wèn)題。上面的假設(shè)“如果存在這樣的權(quán)重集合”提出了一個(gè)這樣的困惑,即什么樣的問(wèn)題可能或不可能被感知器解決。令人尷尬的是,在二維平面中,簡(jiǎn)單分布的點(diǎn)不能被感知器分開(kāi)(見(jiàn)圖3–5,非線性)。事實(shí)證明,坦克感知器不是坦克分類器,而是天氣分類器。a對(duì)圖像中的坦克進(jìn)行分類要困難得多,而事實(shí)上,它不能用感知器來(lái)完成。這也表明,即使感知器學(xué)到了一些東西,也可能不是你認(rèn)為它應(yīng)該學(xué)到的那些東西。壓倒感知器的最后一根稻草是馬文·明斯基和西摩爾·帕普特在1969年發(fā)表的數(shù)學(xué)專著《感知器》(Perceptrons)。 他們明確的幾何分析表明,感知器的能力是有限的:它們只能區(qū)分線性可分的類別(見(jiàn)圖3–5)。
這本書的封面展示了明斯基和帕普特證明的感知器無(wú)法解決的幾何問(wèn)題(見(jiàn)圖3–7)。盡管在書的末尾,明斯基和帕普特考慮了將單層感知器進(jìn)行泛化成為多層感知器的前景, 但他們懷疑可能沒(méi)有辦法訓(xùn)練這些更強(qiáng)大的感知器。不幸的是,許多人對(duì)他們的論斷堅(jiān)信不疑,于是這個(gè)研究領(lǐng)域漸漸被人們遺忘,直到20世紀(jì)80年代,新一代神經(jīng)網(wǎng)絡(luò)研究人員開(kāi)始重新審視這個(gè)問(wèn)題。
在感知器中,每個(gè)輸入都獨(dú)立地向輸出單元提供證據(jù)。但是,如果需要依靠多個(gè)輸入的組合來(lái)做決定,那會(huì)怎樣呢?這就是感知器無(wú)法區(qū)分螺旋結(jié)構(gòu)是否相連的原因:?jiǎn)蝹€(gè)像素并不能提供它是在內(nèi)部還是外部的位置信息。盡管在多層前饋神經(jīng)網(wǎng)絡(luò)中,可以在輸入和輸出單元之間的中間層中形成多個(gè)輸入的組合,但是在20世紀(jì)60年代,還沒(méi)有人知道如何訓(xùn)練簡(jiǎn)單到中間只有一層“隱藏單元”(hiddenunits)的神經(jīng)網(wǎng)絡(luò)。
弗蘭克·羅森布拉特和馬文·明斯基曾是紐約市布朗克斯科技高中的同班同學(xué)。他們?cè)诳茖W(xué)會(huì)議上為各自迥異的人工智能研究方法展開(kāi)了辯論,而與會(huì)者更傾向于明斯基的方法。盡管存在差異,但他們二人對(duì)我們理解感知器都有著重要貢獻(xiàn),而這正是深度學(xué)習(xí)的起點(diǎn)。
羅森布拉特在1971年死于一次駕船事故,年僅43歲,當(dāng)時(shí)正值人們幾乎一邊倒地反對(duì)感知器的時(shí)期。有傳言說(shuō)他可能是自殺,但也可能只是一次不幸的出游。15不可否認(rèn)的是,一個(gè)發(fā)現(xiàn)了利用神經(jīng)網(wǎng)絡(luò)進(jìn)行計(jì)算的新方式的英雄時(shí)代已經(jīng)謝幕;又過(guò)了整整一代人的時(shí)間,羅森布拉特開(kāi)創(chuàng)性努力的承諾才得以實(shí)現(xiàn)。
未來(lái)智能實(shí)驗(yàn)室是人工智能學(xué)家與科學(xué)院相關(guān)機(jī)構(gòu)聯(lián)合成立的人工智能,互聯(lián)網(wǎng)和腦科學(xué)交叉研究機(jī)構(gòu)。
未來(lái)智能實(shí)驗(yàn)室的主要工作包括:建立AI智能系統(tǒng)智商評(píng)測(cè)體系,開(kāi)展世界人工智能智商評(píng)測(cè);開(kāi)展互聯(lián)網(wǎng)(城市)云腦研究計(jì)劃,構(gòu)建互聯(lián)網(wǎng)(城市)云腦技術(shù)和企業(yè)圖譜,為提升企業(yè),行業(yè)與城市的智能水平服務(wù)。
-
神經(jīng)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
42文章
4811瀏覽量
103093 -
人工智能
+關(guān)注
關(guān)注
1805文章
48851瀏覽量
247595
原文標(biāo)題:神經(jīng)網(wǎng)絡(luò)的黎明
文章出處:【微信號(hào):AItists,微信公眾號(hào):人工智能學(xué)家】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
如何優(yōu)化BP神經(jīng)網(wǎng)絡(luò)的學(xué)習(xí)率
全卷積神經(jīng)網(wǎng)絡(luò)的工作原理和應(yīng)用
BP神經(jīng)網(wǎng)絡(luò)和卷積神經(jīng)網(wǎng)絡(luò)的關(guān)系
BP神經(jīng)網(wǎng)絡(luò)和人工神經(jīng)網(wǎng)絡(luò)的區(qū)別
rnn是遞歸神經(jīng)網(wǎng)絡(luò)還是循環(huán)神經(jīng)網(wǎng)絡(luò)
遞歸神經(jīng)網(wǎng)絡(luò)是循環(huán)神經(jīng)網(wǎng)絡(luò)嗎
循環(huán)神經(jīng)網(wǎng)絡(luò)和卷積神經(jīng)網(wǎng)絡(luò)的區(qū)別
循環(huán)神經(jīng)網(wǎng)絡(luò)和遞歸神經(jīng)網(wǎng)絡(luò)的區(qū)別
深度神經(jīng)網(wǎng)絡(luò)與基本神經(jīng)網(wǎng)絡(luò)的區(qū)別
卷積神經(jīng)網(wǎng)絡(luò)與循環(huán)神經(jīng)網(wǎng)絡(luò)的區(qū)別
反向傳播神經(jīng)網(wǎng)絡(luò)和bp神經(jīng)網(wǎng)絡(luò)的區(qū)別
神經(jīng)網(wǎng)絡(luò)和人工智能的關(guān)系是什么
bp神經(jīng)網(wǎng)絡(luò)和卷積神經(jīng)網(wǎng)絡(luò)區(qū)別是什么
卷積神經(jīng)網(wǎng)絡(luò)和bp神經(jīng)網(wǎng)絡(luò)的區(qū)別
神經(jīng)網(wǎng)絡(luò)架構(gòu)有哪些
- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無(wú)線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 社區(qū)
- 小組
- 論壇
- 問(wèn)答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開(kāi)發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:[email protected]
- 內(nèi)容合作
- 黃晶晶:[email protected]
- 內(nèi)容合作(海外)
- 張迎輝:[email protected]
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:[email protected]
- 投資合作
- 曾海銀:[email protected]
- 社區(qū)合作
- 劉勇:[email protected]
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
評(píng)論