 汽車自動駕駛的“那些事” 你知道嗎?
汽車自動駕駛的“那些事” 你知道嗎?
身處汽車行業,深感汽車行業的技術革新是迅速的,這次只拿自動駕駛聊聊個人的一些想法和觀點,因自動駕駛作為當前熱點及未來汽車發展的方向,我們有必要拿出來整理分析一波。
目前自動駕駛的很多技術其實在機器人領域很早就已出現和應用,比如導航定位、機器視覺等,因此自動駕駛可以算是機器人領域應用的一塊分支,所以我們也不必過分夸大它有多牛掰。因自動駕駛系統的實驗最早可追溯到1920年,而真正意義上的第一輛自動駕駛汽車也在1977年由日本的Tsukuba Mechanical Engineering Laboratory開發出來。隨著時代的變化,該技術也得到了快速的發展和推廣,Waymo在2018年10月份曾透漏其在自動駕駛的測試里程已超過16000000km并以每月1600000km的速度增長,在12月Waymo成為了美國第一家商業化自動駕駛出行服務的公司,這樣的技術進步和取得的成果是著實不易的,當然我也對自動駕駛真正的商業化持保守態度,但在這個AI、機器學習、大數據、車聯網盛起的年代(個人認為這些雖是未來方向,但過去幾年都有被過度炒作的嫌疑),其是未來出行方式的必然選擇是不爭的事實,很多零部件供應商和傳統OEM都在自動駕駛領域積極部署以期搶占先機。
前段時間看到Tier1的零部件供應商“BOSCH豪擲10億歐元在德建立半導體工廠從而掌握自動駕駛芯片化的核心競爭力”的消息,個人對該消息其實是不Care的,因BOSCH在自動駕駛解決方案的研究其實很早就開始并測試驗證,如果哪個零部件供應商或OEM不在自動駕駛領域方面進行規劃和部署反而是一種不正常。
一.自動駕駛的分級
對自動駕駛的分級,全球汽車行業公認兩個組織提出的:美國高速公路安全管理局(NHTSA)和美國機動車工程師學會(SAE),但在這兩者中又以按SAE的分級標準居多,SAE將自動駕駛層級劃分為6級,如下:
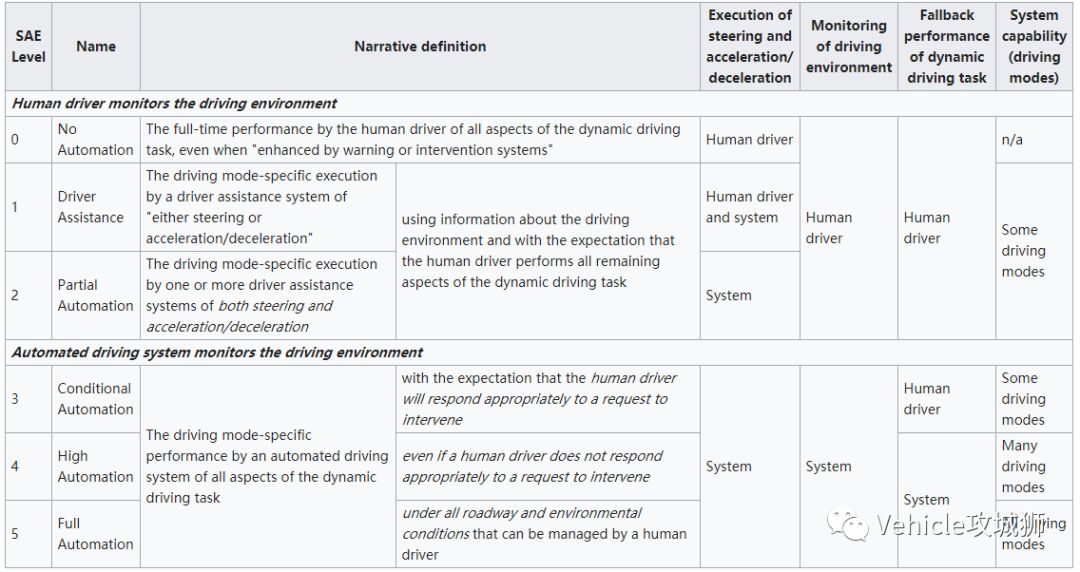
對于各個等級的詳細介紹,網上有很多,我這里不再詳細贅述。
二.自動駕駛的相關技術
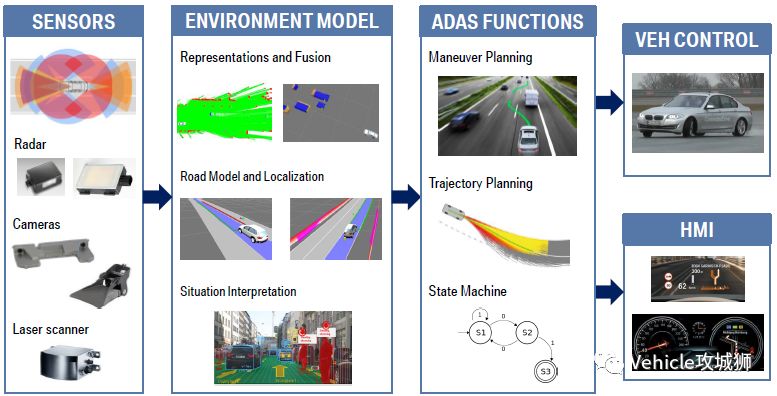
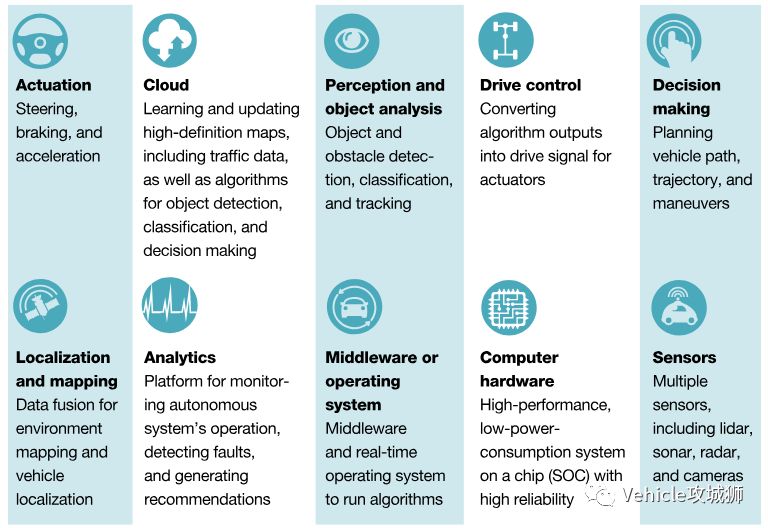
無人駕駛技術涉及多技術集成和多學科交叉,一無人駕駛系統包含多個傳感器:激光雷達、RGB和深度攝像頭、GPS、長距雷達、短距雷達、IMU等,同時又需整合多個軟件模塊(包括路徑規劃、避障、定位、圖像識別和環境建模等),此外還需要強大的硬件基于軟件功能實時處理海量的傳感器信息并實現對車輛的控制,因此對系統設計和軟硬件資源都提出了更高的要求。
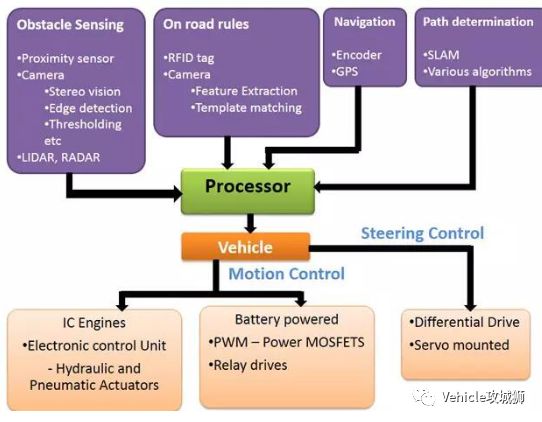
無人駕駛系統首先獲取并處理所處環境信息,基于數據和算法確定當前所處位置,并根據所設定的目標規劃一條合理最優的運動路徑,從而驅動車輛向目標移動并規避移動過程中的障礙物或對緊急情況采取必要的安全措施,因此所涉及的技術包括:導航定位、路徑規劃、圖像識別、機器學習和傳感器融合等相關技術。
下面選三個方面大體聊聊
1. 導航定位技術
導航定位技術是自動駕駛系統的關鍵和基礎,它能反映車輛自主性和智能性,在自動駕駛領域,導航定位主要采用SLAM技術。SLAM技術的實現途徑有視覺SLAM(VSLAM)和激光雷達SLAM(Ladar-SLAM),激光雷達SLAM是目前最穩定、最可靠且性能最高的SLAM方式,在無人駕駛領域大都采用基于激光雷達的SLAM技術。SLAM當前實現的方式大致有兩類:基于概率模型和非概率模型的方法,其中基于概率的方法是當前研究的重點,基于概率模型的算法主要有基于卡爾曼濾波的SLAM、基于粒子濾波的FastSLAM等。
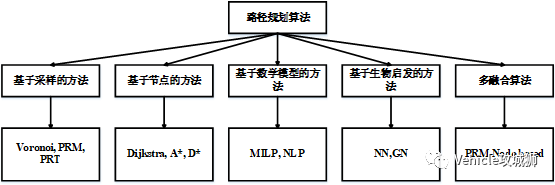
2. 路徑規劃技術
路徑規劃主要有全局和局部路徑規劃兩種,全局路徑規劃需要依賴已建立的環境地圖(即先驗地圖),其作用就是建立一條從起點到目標點的全局路線;而局部路徑規劃則是根據全局路徑基于動態環境所進行的一種路徑規劃技術,從而適應存在未知障礙物或障礙物存在變化的環境。
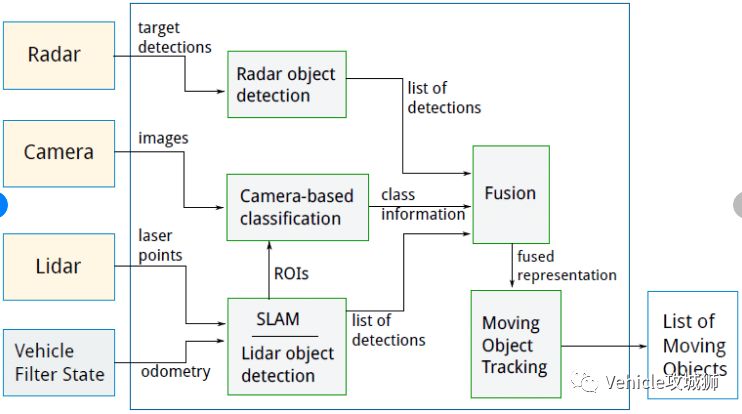
3. 傳感器融合技術
自動駕駛車會載有激光雷達、RGB-D深度攝像頭、超聲波等不同位置的多個同類或不同類的傳感器。而為了對各個傳感器所獲取的局部環境信息加以綜合,形成對環境完整準確的描述,必須采用多傳感器融合技術來克服單個傳感器所具有的局限性。多傳感器融合技術主要有基于參數推理的貝葉斯推理、基于模糊集理論的方法、基于神經網絡法及卡爾曼濾波法等,其中應用最為廣泛的多傳感器融合技術是卡爾曼濾波法。
三. 所需技能Get
從上所述可知自動駕駛所涉及的學科和技術很多,但作為個人應該在哪些方面進行個人技能的提升,從而能夠成為一名自動駕駛工程師呢?我這里只列出四個方面的技能要求:
1. 扎實的數學功底
當你一腳踏入機器人和無人駕駛領域,你會經常接觸到諸如貝葉斯濾波、卡爾曼濾波、粒子濾波、高斯分布等一系列讓你懷疑人生的專業術語,而這些原理的推導往往需要扎實的線性代數和概率統計功底,此外強大的數學基礎是進行算法設計和優化的基礎,越來越發覺線性代數、概率統計、數值計算在當前AI、機器學習和大數據盛行時代下的重要性,因為當前很多問題最終都可通過概率統計和線性代數進行建模和求解,曾看到某位大神這么說過“優秀的工程師和科學家在職業生涯中要學至少五次線性代數”,看到這,我等后輩是不是心涼了很多,但大家莫慌,讓我們擼起袖子就是干!!!
2. 過硬的編程技術
首先,發表個人觀點:在可預見的未來,C是最好的語言,Linux是最好的操作系統。當然這不是說讓大家有選擇性的選擇自己應學習哪種編程語言,因為具體到工作則需要兼備多種編程語言或跨平臺的開發能力,每個人需要根據自己的實際情況去學習,例如嵌入式開發毫無疑問優先選擇C,而算法開發則可能會使用C++、Python或Matlab/Simulink,而不同的應用又可能依賴于不同的平臺才能運行,例如很多自動駕駛項目都基于ROS做的算法和應用開發,而ROS作為中間件則依賴于Linux,因此具體情況具體分析,但多種編程語言的掌握是必須的。
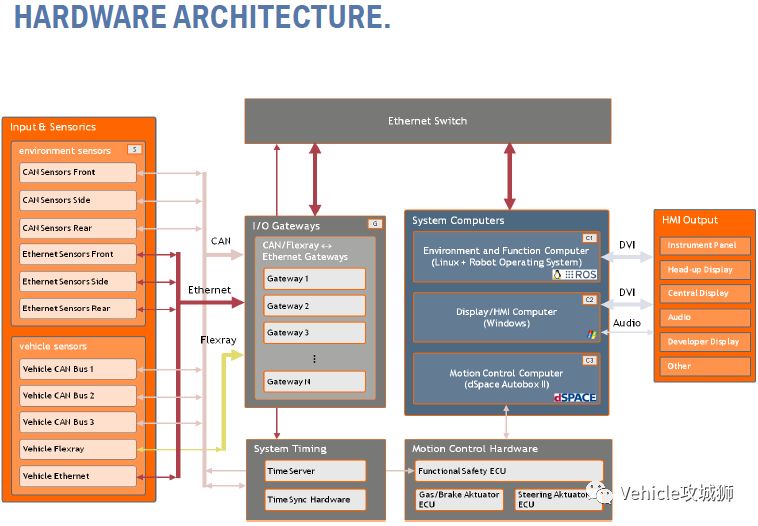
3. 軟硬件開發能力
掌握編程語言是進行軟件功能開發的基礎,同時也會為我們查問題提供了保障,而軟件功能則是需求的實現,如何將一復雜的系統需求通過編程的手段實現則是一種能力。此外,軟件功能的實現最終需依賴于硬件,對于硬件的設計及工作原理的掌握也是不可或缺的。
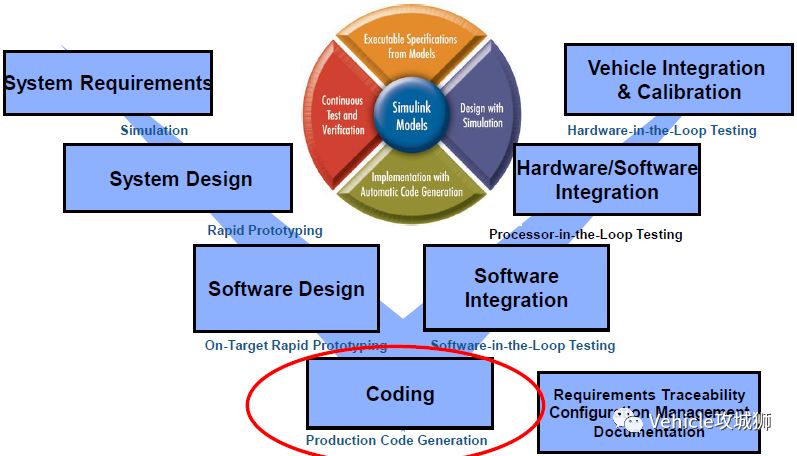
4. 熟悉汽車電子的開發流程
IT行業的軟件開發不同于汽車軟件的開發,汽車行業有諸多的標準要遵循且還有諸多的測試驗證要求,在可靠性和安全性方面有著更高的要求。汽車行業需要可靠的軟件設計同時還需要滿足嵌入式的需求,而這些要求的實現需要高質量的代碼、充分的測試覆蓋度和豐富的批產經驗等方面來支撐。
因此自動駕駛作為一門交叉學科,其涉及的方面很多,每個人不可能包攬每項的冠軍,而應選擇成為某一領域的專家。
四.普及依然漫長
關于自動駕駛,正如英國 Millbrook 試驗場首席自動駕駛汽車工程師 Peter Stoker所說:“如今,有關自動駕駛的炒作從來沒有停止,但我們必須明確告訴大家,自動駕駛汽車并不會在未來幾年中大量出現在人們的生活中。而且,即使自動駕駛汽車最終真正到來,也一定是先在有限區域中進行有選擇性的逐步推廣,比如“貨物運輸”和“最后一英里通勤”等行駛路線較為固定的行駛場景。”因此技術的普及依然需要很長的時間,至于原因,我這里只摘三個方面進行說明:
1. 系統的可靠性
這一點應該是最重要的一點,因安全是汽車行業的生命線,自動駕駛要想走向實際應用,其最終必須能在復雜的環境中保證系統的穩定性并提供足夠的駕駛安全,而在這方面我認為很多自動駕駛公司其實都還沒做到這種地步。
2. 成本限制
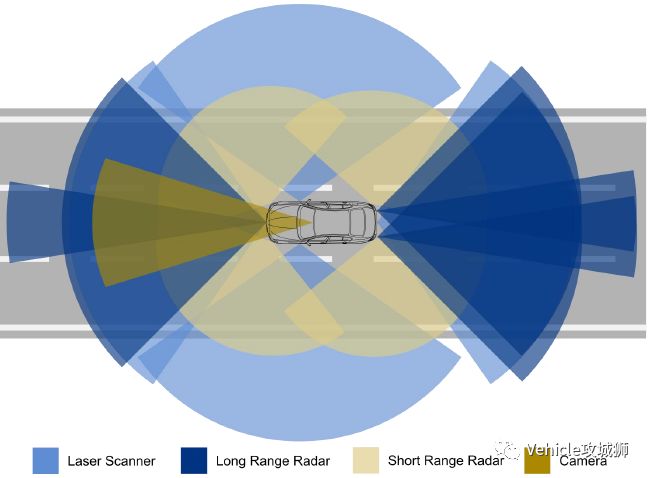
自動駕駛汽車功能的實現需要依賴于不同或相同的多個傳感器支持和強大的硬件實現,以必不可少的激光雷達為例,車用激光雷達行業先導公司Velodyne推出的激光雷達具有測量精度高、性能優越的特點,同時具有豐富的產品線,包括16線、32線及64線等產品,但同樣價格也是高昂的。

因此可想而知,單單激光雷達的成本就已很高,如果再加上長短距雷達、攝像頭等傳感器和硬件,整車的成本無疑是高昂的。
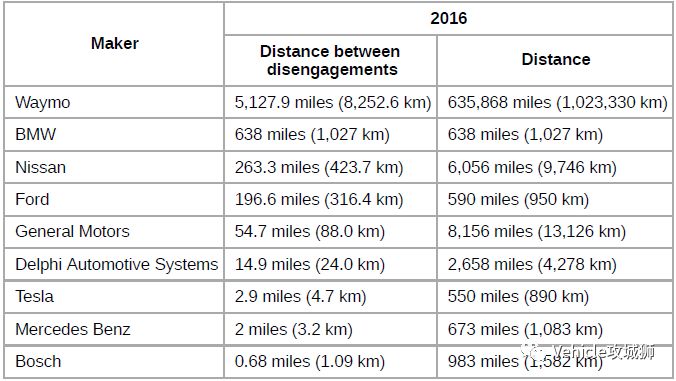
3. 充分的實驗驗證
自動駕駛汽車功能的測試驗證需要足夠且豐富的樣本數據,樣本數據的采集及算法的訓練需要耗費長期且大量的時間積累,如下是2016年幾大零部件供應商和OEM在該方面測試的里程數匯總。
-
自動駕駛
+關注
關注
788文章
14209瀏覽量
169604
原文標題:聊聊自動駕駛
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
自動駕駛安全基石:ODD
《汽車駕駛自動化分級》會更適合中國自動駕駛發展嗎?


NVIDIA Halos自動駕駛汽車安全系統發布
理想汽車推出全新自動駕駛架構
自動駕駛的未來 - 了解如何無縫、可靠地完成駕駛

MEMS技術在自動駕駛汽車中的應用







 工商網監
工商網監
評論