") 網(wǎng)絡(luò)連接實現(xiàn)機器對機器的連接
網(wǎng)絡(luò)連接實現(xiàn)機器對機器的連接

網(wǎng)絡(luò)連接正成為嵌入式系統(tǒng)和移動/便攜式設(shè)備通過點對點協(xié)議實現(xiàn)機器對機器(M2M)連接的默認方法。這些系統(tǒng)使用多種數(shù)據(jù)格式和網(wǎng)絡(luò)方法,從無線選項到全高速LAN/WAN環(huán)境。
實現(xiàn)此連接有兩種主要方法:添加到現(xiàn)有設(shè)計的現(xiàn)有連接的補充網(wǎng)絡(luò)控制器;以及通過其微控制器和傳感器子系統(tǒng)中的嵌入式功能將網(wǎng)絡(luò)協(xié)議和接口結(jié)合在一起。這些應(yīng)用程序的關(guān)鍵特性之一是開發(fā)這些接口及其相關(guān)開發(fā)環(huán)境所需的軟件和固件控制。
遺留系統(tǒng)
現(xiàn)在部署在現(xiàn)場的大多數(shù)嵌入式系統(tǒng)需要連接到網(wǎng)絡(luò),以便自動監(jiān)控其進度和系統(tǒng)運行狀況。挑戰(zhàn)在于如何在不必重新認證整個設(shè)計的情況下實現(xiàn)這一新功能,或者更糟糕的是,更改系統(tǒng)的固件并且必須重新驗證正確的操作。對于這些當前設(shè)計來說最方便的兩種方法涉及將網(wǎng)絡(luò)功能添加到系統(tǒng)上的現(xiàn)有端口或?qū)⒕W(wǎng)絡(luò)適配器芯片添加到直接與微控制器接口的PCB。
這些傳統(tǒng)設(shè)計中的一個常見端口是串行端口。這些端口通常用于數(shù)據(jù)收集和數(shù)據(jù)傳輸,已從舊的RS-232接口轉(zhuǎn)移到USB。 USB協(xié)議包括本地配置固件,允許系統(tǒng)自動配置并自我調(diào)整連接到端口的設(shè)備。除自動配置外,USB端口還支持自供電設(shè)備。此設(shè)置適用于Digi International的XStick?XU-A11 USB轉(zhuǎn)XBee?收發(fā)器等產(chǎn)品。
提供XBee PRO和ZigBee?PRO協(xié)議(見圖1),獨立的無線收發(fā)器支持采用USB供電的802.15.4設(shè)備,帶有集成的無線天線和模擬前端。 USB到XBee無線個域網(wǎng)適配器(WPAN)提供訪問,配置和網(wǎng)絡(luò)調(diào)試的本地連接,并提供自我修復(fù),自配置ZigBee網(wǎng)狀或快速802.15.4多點版本。
圖1:Digi International的XStick?XU-A11 USB轉(zhuǎn)XBee?收發(fā)器(由Digi International提供)。
對于可以支持電路板修改或插卡以增加連接性的系統(tǒng),可以使用德州儀器(TI)的TLK1201IRCP以太網(wǎng)收發(fā)器等解決方案。該單芯片器件的工作電壓低至2.5伏,并具有可熱插拔的版本,適用于高可用性應(yīng)用。
TLK1201IRCP以太網(wǎng)收發(fā)器旨在為基于標準微控制器的系統(tǒng)添加超高速,全雙工,點對點數(shù)據(jù)傳輸。該器件支持IEEE 802.3千兆以太網(wǎng)規(guī)范下10位接口規(guī)范的時序要求,并符合ANSI X3.230-1994(FC-PH)光纖通道標準。該器件可支持0.6 Gbps至1.3 Gbps的數(shù)據(jù)速率。 TLK1201以太網(wǎng)收發(fā)器的框圖如圖2所示。
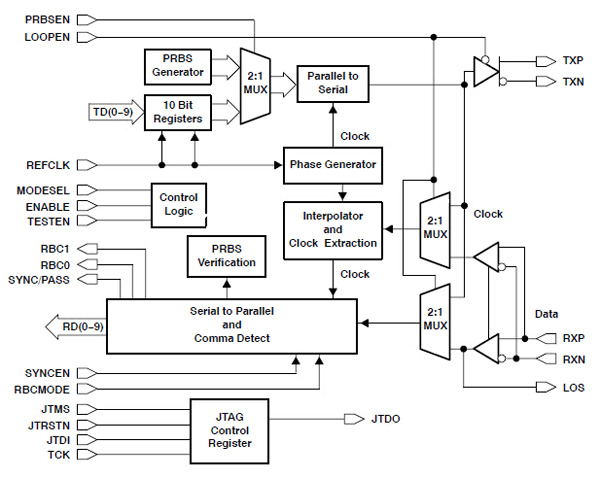
圖2:德州儀器的TLK1201IRCP以太網(wǎng)控制器框圖(由德州儀器公司提供)。
對于嵌入式應(yīng)用,該芯片設(shè)計用于通過各種傳輸介質(zhì)發(fā)送數(shù)據(jù),包括印刷電路板走線,銅纜和光纖電纜。數(shù)據(jù)傳輸?shù)臄?shù)據(jù)速率和連接長度取決于介質(zhì)的信號衰減特性和信號環(huán)境中的噪聲耦合。
TLK1201為PHY器件執(zhí)行所有必要的數(shù)據(jù)序列化,反序列化和時鐘提取功能。收發(fā)器的工作速率為1.25 Gbps(典型值),可轉(zhuǎn)換為銅纜或光纖介質(zhì)上高達1 Gbps的數(shù)據(jù)帶寬。為了最大限度地兼容當前和傳統(tǒng)系統(tǒng),TLK1201支持規(guī)范的10位接口(TBI)和利用雙倍數(shù)據(jù)速率(DDR)時鐘的簡化5位接口。在TBI模式下,串行器/解串器(SERDES)接受10位寬的8b或10b并行編碼數(shù)據(jù)字節(jié)。
其他連接選項
對于某些應(yīng)用,例如汽車網(wǎng)絡(luò),沒有主控制器來處理數(shù)據(jù)管理。結(jié)果,當沒有主機控制器時,使用諸如CAN的通信方法。 CAN總線是一種基于消息的協(xié)議,專為汽車應(yīng)用而設(shè)計,但現(xiàn)在也用于其他領(lǐng)域,如工業(yè)自動化和醫(yī)療設(shè)備。
CAN是用于連接電子控制單元(ECU)的多主廣播串行總線標準。該協(xié)議允許每個節(jié)點能夠通過總線發(fā)送和接收消息,但不能同時發(fā)送和接收消息。發(fā)送的消息由一個標識符組成,該標識符用作消息優(yōu)先級的定義,以及最多八個數(shù)據(jù)字節(jié)。數(shù)據(jù)串行傳輸?shù)娇偩€上。總線采用信號模式進行管理,信號模式以非歸零(NRZ)編碼,并由所有節(jié)點同時檢測。
通過CAN網(wǎng)絡(luò)連接的設(shè)備通常是傳感器,執(zhí)行器和其他控制設(shè)備。這些器件不是直接連接到總線,而是通過主處理器和CAN控制器,如德州儀器的SN65HVD1050DR RMC CAN收發(fā)器。
如果CAN總線空閑,任何節(jié)點都可以開始發(fā)送數(shù)據(jù)。如果兩個或多個節(jié)點同時開始發(fā)送消息,則具有更多顯性ID或優(yōu)先級(具有更多顯性位,即零)的消息將覆蓋其他節(jié)點的不太主導的ID。最終(在對ID進行仲裁之后)僅剩下主導消息并且所有節(jié)點都接收它。該機制稱為基于優(yōu)先級的總線仲裁。具有數(shù)值較小的ID值的消息具有較高的優(yōu)先級并且首先被發(fā)送。
作為CAN收發(fā)器(見圖3),這款德州儀器部件為總線提供差分傳輸能力,并為CAN控制器提供差分接收能力,信號速率高達每秒1兆位。 SNHVD1050DR專為在特別惡劣的環(huán)境中工作而設(shè)計,具有-27至40伏的交叉線,過壓和失地保護功能。過熱關(guān)閉; -12至12伏共模范圍;根據(jù)ISO 7637,能夠承受-200至200伏的瞬態(tài)電壓。醫(yī)療電子界開始采用這種總線技術(shù),因為它具有高電磁抗擾性(EMI)和極低的電磁輻射(EME)。
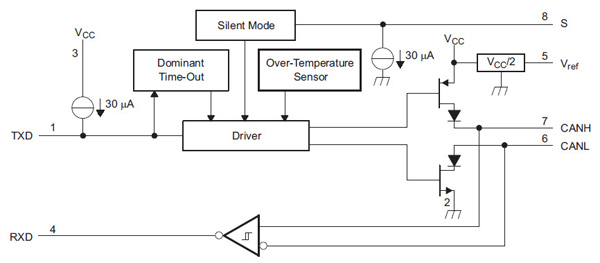
圖3:德州儀器(TI)的SN65HVD1050DR EMC CAN收發(fā)器框圖(由德州儀器公司提供)。
處理小數(shù)據(jù)長度傳輸?shù)倪z留系統(tǒng)的另一個選擇是使用無線藍牙?連接。該系統(tǒng)類似于Wi-Fi?和網(wǎng)狀網(wǎng)絡(luò),因為它們需要固件來處理所有數(shù)據(jù)接口,模擬前端,天線系統(tǒng)和數(shù)據(jù)傳輸協(xié)議。 Microchip的RN-220XP藍牙適配器等完整解決方案可用于標準的9針RS232連接(參見圖4)。獨立單元可以在連接后立即開始發(fā)送數(shù)據(jù)。它包括一個集成的鋰聚合物可充電電池,可運行長達32小時。這使得該單元可用于維護和現(xiàn)場系統(tǒng)升級期間的數(shù)據(jù)監(jiān)控和信號傳輸,而無需手動配置主設(shè)備或提供外部電源。該連接支持1200至232.4 Kbps的波特率。該設(shè)備可通過藍牙連接在串行接口上進行遠程配置。該器件還支持高級觸發(fā)模式,可以檢測輸入數(shù)據(jù),并根據(jù)需要自動連接和斷開以節(jié)省電量。
圖4:Microchip RN-220XP RS232藍牙適配器(由Microchip提供)。
集成系統(tǒng)
對于基于微控制器的新系統(tǒng),首選的通信方法是使用具有集成通信端口和協(xié)議處理程序的MCU。由于最終應(yīng)用程序在創(chuàng)建MCU之前是未知的,因此它們往往包括多種通信協(xié)議和連接功能。最常見的是USB 2.0,10/100Mbps以太網(wǎng),CAN和JTAG。示例包括Microchip的帶有嵌入式閃存的PIC32MX764F128H和瑞薩的RX62N。
Microchip的PIC32MX5/6/7XX微控制器系列使用MIPS32?M4K?處理器作為核心。該內(nèi)核具有簡單的雙總線接口,具有獨立的32位地址和數(shù)據(jù)總線。在此接口中,可以中止事務(wù)以改善中斷延遲。該內(nèi)核還具有EJTAG調(diào)試和指令跟蹤,支持單步執(zhí)行,虛擬指令和數(shù)據(jù)地址/值,斷點以及跟蹤壓縮的PC跟蹤。
通信接口以六個UART模塊的標準功能開始,支持RS-232,RS-485和LIN;帶有片上硬件編碼器和解碼器的IrDA接口;最多四個SPI模塊和五個I2C模塊。 USB,CAN,JTAG和以太網(wǎng)補充了這些標準MCU接口模塊。
PIC32?MCU具有USB DMA控制器,可在RAM和SIE中的數(shù)據(jù)緩沖區(qū)之間傳輸數(shù)據(jù)。寄存器接口允許CPU配置模塊并與之通信。 PIC32 USB模塊包括對主機和設(shè)備的USB全速支持,低速主機支持,USB OTG支持,集成信號電阻,用于VBUS監(jiān)控的集成模擬比較器,集成USB收發(fā)器,硬件事務(wù)握手,端點緩沖等任何地方在系統(tǒng)RAM中,以及用于訪問系統(tǒng)RAM和Flash的集成DMA。該USB接口允許PIC32 CPU處理不屬于核心SoC的無線數(shù)據(jù)通信協(xié)議。
PIC32的CAN接口滿足所有CAN 2.0B一致性規(guī)范,數(shù)據(jù)額定速率高達每秒1兆位。 CAN消息接收和傳輸功能包括32個消息FIFO,其中每個FIFO最多可以有32條消息,總共1024條消息;每個FIFO可以是發(fā)送消息FIFO或接收消息FIFO;用戶定義的消息優(yōu)先級;三十二個用于消息過濾的接收過濾器;四個接收過濾掩碼寄存器用于消息過濾;對遠程傳輸請求的自動響應(yīng);和低功耗運行模式。 CAN模塊是PIC32系統(tǒng)總線上的總線主控制器。
PIC32具有以太網(wǎng)控制器作為總線主模塊。它需要與片外物理層(PHY)連接,以在系統(tǒng)中實現(xiàn)完整的以太網(wǎng)節(jié)點,如圖5所示。內(nèi)部以太網(wǎng)控制器支持以下功能,這些功能是外部PHY的驅(qū)動程序:10/100 Mbps數(shù)據(jù)轉(zhuǎn)移率;全雙工和半雙工操作; RMII和MII PHY接口,MIIM PHY管理接口;手動和自動流量控制;基于RAM描述符的DMA操作,用于接收和發(fā)送路徑;和完全可配置的中斷。
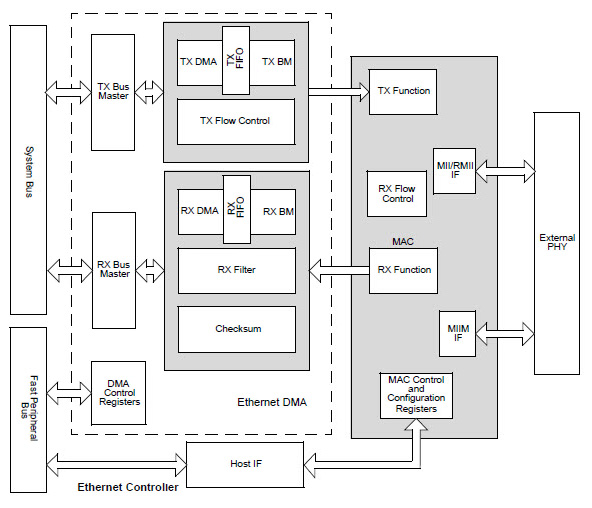
圖5:Microchip的PIC32MX5XX內(nèi)部以太網(wǎng)控制器框圖(由Microchip提供)。
該設(shè)備還具有可配置的接收數(shù)據(jù)包過濾功能。可配置選項包括CRC校驗;廣播,組播和單播數(shù)據(jù)包的64字節(jié)模式匹配; Magic Packet?;一個64位的哈希表; runt數(shù)據(jù)包和數(shù)據(jù)包有效負載校驗和計算。
高級微控制器
嵌入式控制器的高端產(chǎn)品是瑞薩的RX62N。這是一個完整的32位CPU,帶有單精度32位IEEE-754浮點處理器;一個累加器,配置為一個32×32到64位的結(jié)果,在一個指令周期內(nèi)運行;一個乘法/除法單元,在一個CPU時鐘內(nèi)具有32×32乘法,用于多個指令;以及具有5級管道的CISC/哈佛建筑。 SoC具有內(nèi)置邏輯,支持高達WQVGA分辨率的TFT-LCD和多達20個擴展功能定時器。
該芯片的一個關(guān)鍵特性是支持多達14個與外部連接的通信接口。它們包括帶有PHY(2個通道)的USB 2.0全速接口,支持主機/功能/OTG和10個端點(控制,中斷,批量和等時);以太網(wǎng)MAC 10/100 Mbps,支持一個通道的半雙工或全雙工;一個帶有兩千字節(jié)發(fā)送和接收FIFO的專用DMA;外部10/100 Mbps PHY的RMII或MII接口;符合ISO11898-1標準的CAN系統(tǒng),支持一個帶有32個郵箱的通道;異步,時鐘同步,智能卡和9位模式(六個通道)SCI通道; I2C通過SMBus支持(兩個通道)接口,每秒最高可達1兆位;最后是兩個頻道的RSPI。
這些SoC的架構(gòu)如圖6所示。這些模塊包括128個GPIO通道,兩個10位DAC通道,以及一個可配置為一個12位x 8通道且單個采樣和保持的ADC或者作為兩個10位x 4通道ADC,每個ADC都有一個采樣和保持。
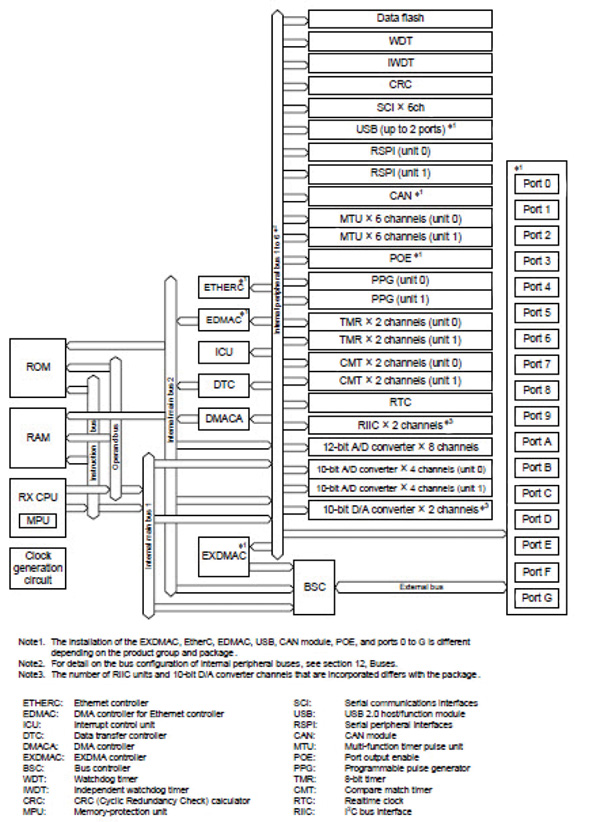
圖6:瑞薩的RX62N微控制器(由Renesas提供)。
-
收發(fā)器
+關(guān)注
關(guān)注
10文章
3671瀏覽量
107926 -
控制器
+關(guān)注
關(guān)注
114文章
17098瀏覽量
184201 -
嵌入式
+關(guān)注
關(guān)注
5150文章
19659瀏覽量
317392
發(fā)布評論請先 登錄
關(guān)于網(wǎng)絡(luò)連接問題
機器人技術(shù)和機器學習
基于802.1X 的可信網(wǎng)絡(luò)連接技術(shù)
網(wǎng)絡(luò)連接技術(shù)
網(wǎng)絡(luò)連接存儲器,什么是網(wǎng)絡(luò)連接存儲器
Linux教程之如何配置網(wǎng)絡(luò)連接的資料概述
面向EtherCAT運動控制應(yīng)用的網(wǎng)絡(luò)連接解決方案
無線網(wǎng)絡(luò)連接故障的解決方法分享
KUKA機器人控制系統(tǒng)的網(wǎng)絡(luò)連接






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論