 為機器人性能提供動力的校準傳感器的性能介紹
為機器人性能提供動力的校準傳感器的性能介紹

機器人現在能夠執行大量的任務,其中許多任務可以在過去幾年中直接追溯到傳感器技術的改進。不僅單個傳感器受益于小型化以及校準和靈敏度的提高,同樣重要的是加入各種傳感器 - 傳感器融合 - 這為機器人提供了多任務處理能力,使它們能夠遠遠超出它們的單一重復功能。被降級了幾十年。
今天的非傳統機器人應用包括字符識別,RFID跟蹤,電子鼻,通信活動等等。今天的機器人具有更高的靈活性,更靈活,更具適應性和智能。
視覺,觸覺,嗅覺,味覺和聽覺方面的進步降低了新機器人應用的價格,同時提高了它們的準確性和可靠性。添加傳感器來測量距離,光線,旋轉,磁力,溫度,壓力,高度和傾斜度,機器可以用來響應周圍的環境線索。機器人的傳感器不僅能夠實現檢測,視覺,觸摸等功能,而且機器人現在能夠與周圍環境進行物理交互(以及使用其他傳感器監控自身)。
校準的重要性
對于所有這些應用,成功推進機器人使用的關鍵是能夠校準板載設備。對于涉及傳感器融合或基于視覺的操縱的機器人活動,必須校準傳感器本身和操縱器(例如,相對于機器人臂長的視覺)。
當考慮到傳感器融合環境中的每個傳感器具有不同的誤差特性時,挑戰變得清晰。今天,每個機器人傳感器和執行器都沒有通用的校準框架,可以解決這些不同的誤差特性。研究和開發現在專注于創建靈活框架的挑戰,在添加每個傳感器時,可以自動校準傳感器融合機器人。
在可能的范圍內,現在可以在部署之前或之后校準單個傳感器。預部署校準的優點是可以降低成本,因為制造商可以一次校準大量傳感器而不是單獨校準。一旦安裝了傳感器,就地校準就會非常耗時,并且傳感器會受到可能影響校準的環境因素的影響。但是,有助于抵達負責校準傳感器的工程師。例如,OPTEK Technology的OCB100系列自動校準板和OCB100-KIT設計套件(圖1)為工程師提供了一個機會,幫助設計人員熟悉各種基本光電傳感器類型的功能,包括透射,反射,和流體。
該套件包括一個自動校準電路卡,可與每個傳感器連接,使評估更容易。校準PCB可以通過板載Molex 70553-0038四針接頭與幾乎任何光電傳感器連接。該電路提供自動校準,因此提供了一種簡單的方法來利用可能在任何類型的傳感器上提供的全系列生產設備。該電路允許工程師補償光電系統中存在的制造變化,溫度變化和器件老化。
圖1:OPTEK Technology的OCB100-Kit。
OCB100系列旨在最大限度地減少因制造差異,溫度變化和器件老化而導致的光器件變化。通過OCB100,設計工程師可以減少許多系統中存在的傳感器到傳感器的差異。通過為系統設計提供預先校準的傳感器,工程師可以提高可靠性和一致性。每次校準系統時都會對LED或光電晶體管的降級進行補償,從而使系統能夠提供已知的,一致的輸出電平,從而實現多年的一致質量。 OCB100系列設計用于即使斷電也能保持校準設置,因此無需每次啟動設備時都需要更快的啟動速度。
機器人傳感器
讓我們看一下機器人應用中使用的幾種常用傳感器,以及它們如何發展以包含使它們更易于使用的高級功能。 VTI Technologies的SCC1300-D02(圖2)將陀螺儀和3軸加速度計與數字SPI接口相結合,用于制導系統,導航,運動分析和控制以及機器人控制系統。
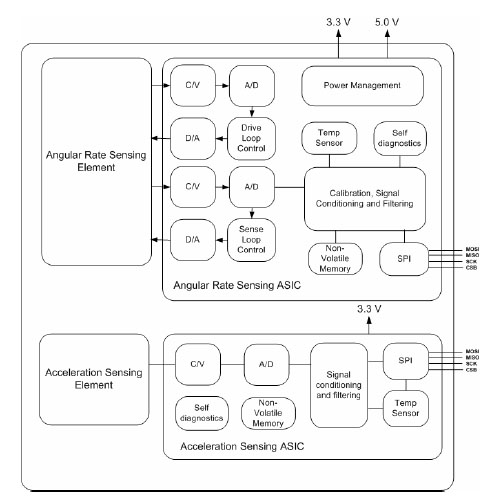
圖2:SCC1300組件框圖(由VTI Technologies提供)。
該傳感器基于電容式3D MEMS技術。該組件集成了角速率和加速度傳感以及靈活的獨立數字SPI接口。雖然角速率傳感器偏置穩定性對所有機械振動和沖擊特別不敏感,但該組件具有多種先進的自診斷和錯誤調節功能。
SCC1300傳感器經過工廠校準。應用中無需單獨校準。生產過程中的修剪參數包括靈敏度,偏移和頻率響應。校準參數在制造期間存儲在非易失性存儲器內。在啟動期間,從內部非易失性存儲器自動讀取參數。
STMicroelectronics的STEVAL-MKI062V2 iNEMO慣性模塊V2演示板(圖3)基于MEMS傳感器和STM32F103RE,這是一款基于ARM的32位MCU,具有256至512 kB閃存,USB,CAN,11個定時器,3 ADC和13個通信接口。 MEMs傳感器將加速度計,陀螺儀和磁力計與壓力和溫度傳感器相結合,提供線性,角度和磁性運動的3軸感應,以及溫度和氣壓計/高度讀數。該解決方案結合了ST在小型化和傳感器集成方面的進步。這種10-DOF(自由度)慣性系統代表了一個完整的硬件平臺,可用于多種應用,包括人機界面和機器人。
為了幫助用戶開發和分析,STEVAL-MKI062V2演示套件包括一個用于傳感器輸出顯示的PC GUI和一個便于使用演示板功能的固件庫。
圖3:STEVAL-MKI052V2慣性模塊V2演示板。
對于任何想要使用低成本且簡單的距離測量方法進行設計的人來說,Parallax PING)))超聲波傳感器可以輕松測量移動物體和靜止物體之間的距離。使用聲納測量從傳輸到回波的距離,并從該單元發射超聲波脈沖。
在設置PING傳感器時,您應該意識到溫度會影響傳感器可測量的空氣中聲音的速度。如果溫度(°C)已知,公式為:
Cair = 331.5 +(0.6 x Tc)m/s
傳感器工作范圍0到70°C的誤差百分比很大(在根據數據表,其幅度為11%至12%。使用轉換常數來計算空氣溫度可以納入其程序中(數據表提供了一個例子)。
圖4:視差PING)))超聲波傳感器。
結論
鑒于快速擴展的傳感器融合環境,傳感器校準比以往任何時候都更加重要。至關重要的是,應用程序中的每個傳感器設備都與變量的測量方式保持一致。如果不是,傳感器數據最多可能是不可靠的,并且最壞的情況是無用的。隨著先進技術的不斷發展,經過良好校準的傳感器將使機器人變得更加靈活,可靠,移動,并且是越來越多應用的理想選擇。
-
傳感器
+關注
關注
2565文章
52971瀏覽量
767173 -
機器人
+關注
關注
213文章
29726瀏覽量
212800 -
超聲波
+關注
關注
63文章
3139瀏覽量
141300
發布評論請先 登錄
納芯微磁傳感器技術推動人形機器人性能提升






 工商網監
工商網監
評論