") 如何使用純模式或組件模式進(jìn)行設(shè)計(jì)
如何使用純模式或組件模式進(jìn)行設(shè)計(jì)
了解SelectIO體系結(jié)構(gòu)的詳細(xì)信息,包括使用純模式或組件模式以及如何開(kāi)始使用純模式或組件模式進(jìn)行設(shè)計(jì)。 該視頻還介紹了高速SelectIO向?qū)У谋緳C(jī)模式。
聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
賽靈思
+關(guān)注
關(guān)注
33文章
1795瀏覽量
132119 -
設(shè)計(jì)
+關(guān)注
關(guān)注
4文章
820瀏覽量
70372
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
OptiSystem應(yīng)用:差分模式延遲和模式帶寬
的第一脈沖上升沿和最后一個(gè)脈沖下降沿之間,在25%的閾值水平上確定的。
DMD分析儀工具將必要的設(shè)備封裝在一個(gè)組件中進(jìn)行此測(cè)量。
光纖模式帶寬可以在時(shí)域測(cè)量,使用光脈沖發(fā)射到光纖的一端,并測(cè)量輸出的時(shí)間
發(fā)表于 04-02 08:45
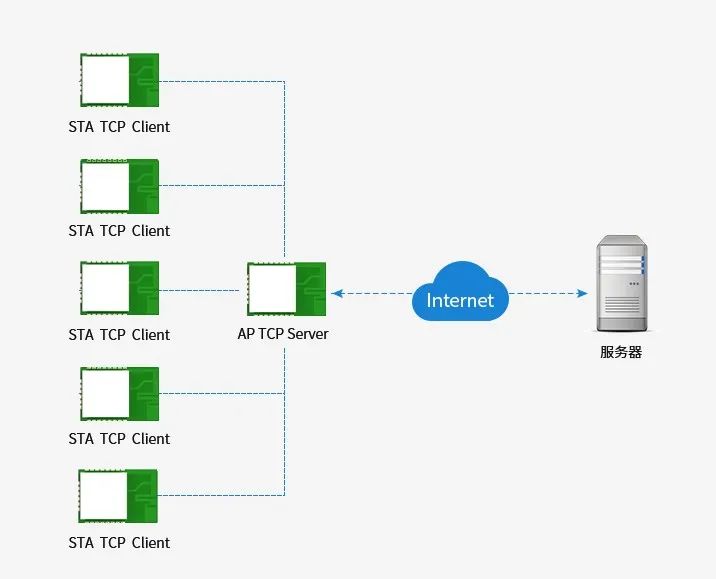
WiFi模塊工作模式講解:AP、STA、AP+STA模式
WiFi模塊作為現(xiàn)代無(wú)線(xiàn)通信的核心組件,其工作模式直接決定了設(shè)備的聯(lián)網(wǎng)能力和應(yīng)用場(chǎng)景。AP(AccessPoint)、STA(Station)和AP+STA(混合模式)是三種最常見(jiàn)的工作模式
設(shè)計(jì)模式-策略模式
作者:京東工業(yè) 孫磊 一、概念 策略模式(Strategy Pattern)也稱(chēng)為(Policy Parttern)。 它定義了算法家族,分別封裝起來(lái),讓它們之間可以互相替換,此模式讓算法的變換

OptiSystem應(yīng)用:差分模式延遲和模式帶寬
的第一脈沖上升沿和最后一個(gè)脈沖下降沿之間,在25%的閾值水平上確定的。
DMD分析儀工具將必要的設(shè)備封裝在一個(gè)組件中進(jìn)行此測(cè)量。
光纖模式帶寬可以在時(shí)域測(cè)量,使用光脈沖發(fā)射到光纖的一端,并測(cè)量輸出的時(shí)間
發(fā)表于 01-03 09:27
usb主機(jī)模式怎么打開(kāi)
與外部設(shè)備進(jìn)行數(shù)據(jù)傳輸和交互。以下是關(guān)于如何打開(kāi)USB主機(jī)模式的指南。 1. 了解USB主機(jī)模式 USB主機(jī)模式允許設(shè)備充當(dāng)USB主機(jī),這意味著它可以連接并控制其他USB設(shè)備。這在需要
usb主機(jī)模式和設(shè)備模式的區(qū)別
: USB主機(jī)模式 在USB主機(jī)模式下,計(jì)算機(jī)或其他設(shè)備扮演主機(jī)的角色,負(fù)責(zé)管理USB總線(xiàn)上的通信。主機(jī)控制數(shù)據(jù)流,包括初始化連接、傳輸數(shù)據(jù)和管理設(shè)備。 主要特點(diǎn): 控制權(quán) :主機(jī)控制USB總線(xiàn)上的所有通信。 數(shù)據(jù)傳輸 :主機(jī)決
晶體管的基本工作模式
晶體管作為電子電路中的核心元件,其基本工作模式對(duì)于理解其工作原理和應(yīng)用至關(guān)重要。晶體管的工作模式主要可以分為兩大類(lèi):放大模式和開(kāi)關(guān)模式。這兩種模式
ARM處理器的工作模式和特點(diǎn)
ARM處理器具有多種工作模式,這些模式根據(jù)處理器執(zhí)行的任務(wù)和當(dāng)前的狀態(tài)進(jìn)行劃分。常見(jiàn)的ARM處理器工作模式包括用戶(hù)模式(User Mode)
vim的三種工作模式是什么?如何切換
的默認(rèn)模式,當(dāng)Vim啟動(dòng)時(shí),它會(huì)自動(dòng)進(jìn)入普通模式。在普通模式下,用戶(hù)可以進(jìn)行文本的瀏覽、選擇、復(fù)制、粘貼、刪除等操作,但不能直接輸入文本。 切換到普通
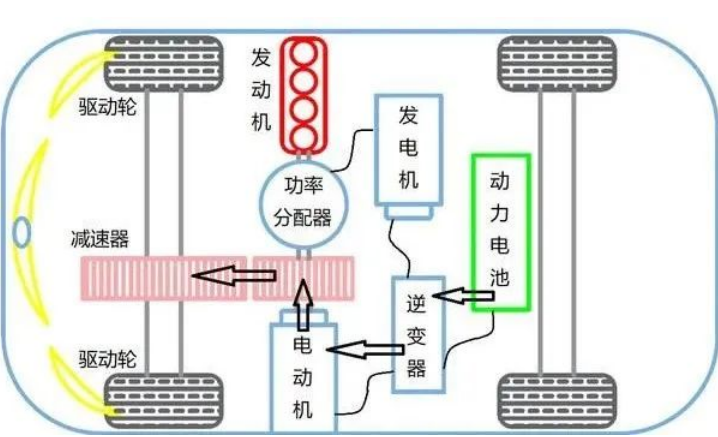
混聯(lián)式混合動(dòng)力汽車(chē)的運(yùn)轉(zhuǎn)模式
混聯(lián)式混合動(dòng)力汽車(chē)擁有幾種關(guān)鍵的驅(qū)動(dòng)模式,包括純電動(dòng)模式、純發(fā)動(dòng)機(jī)模式、混合動(dòng)力模式以及增程
并聯(lián)式混合動(dòng)力汽車(chē)有哪幾種運(yùn)行模式
并聯(lián)式混合動(dòng)力系統(tǒng)具備兩種能量傳輸途徑,能夠使電機(jī)與發(fā)動(dòng)機(jī)同時(shí)或獨(dú)立地為汽車(chē)提供動(dòng)力。這種配置允許車(chē)輛以類(lèi)似純電動(dòng)車(chē)或低排放車(chē)輛的方式運(yùn)行,盡管不能完全依靠電力驅(qū)動(dòng)。此系統(tǒng)的驅(qū)動(dòng)模式主要分為三種:
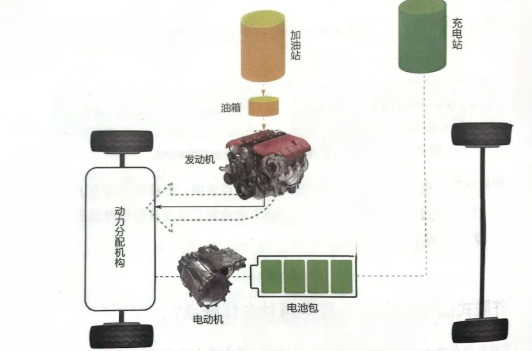
增程式混動(dòng)汽車(chē)的運(yùn)行模式有哪些
在討論增程式混合動(dòng)力汽車(chē)的運(yùn)行模式時(shí),我們可確認(rèn)其擁有五種主要的工作狀態(tài):純電行駛模式、增程器獨(dú)立運(yùn)作模式、混合推進(jìn)模式、能量回收制動(dòng)
藍(lán)牙模組都有哪些工作模式?
模式:藍(lán)牙模塊能夠掃描從機(jī)的廣播信號(hào)并主動(dòng)建立連接,可以和一個(gè)或多個(gè)從設(shè)備進(jìn)行連接通信,主機(jī)定期掃描周?chē)幱趶V播狀態(tài)的設(shè)備發(fā)送的廣播信息,連接后主從雙方可以發(fā)送接

鴻蒙Ability Kit(程序框架服務(wù))【UIAbility組件啟動(dòng)模式】
UIAbility的啟動(dòng)模式是指UIAbility實(shí)例在啟動(dòng)時(shí)的不同呈現(xiàn)狀態(tài)。針對(duì)不同的業(yè)務(wù)場(chǎng)景,系統(tǒng)提供了三種啟動(dòng)模式:
伺服電機(jī)位置模式和速度模式的區(qū)別
伺服電機(jī)作為現(xiàn)代工業(yè)自動(dòng)化領(lǐng)域中的核心動(dòng)力裝置,其控制模式的選擇對(duì)于整個(gè)系統(tǒng)的性能有著至關(guān)重要的影響。在伺服電機(jī)的控制模式中,位置模式和速度模式是最為常見(jiàn)的兩種。本文將對(duì)這兩種





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論