 基于DSP芯片和運動控制算法實現開放式并聯運動機床的控制系統的設計
基于DSP芯片和運動控制算法實現開放式并聯運動機床的控制系統的設計

并聯機床(ParallelMachineTool)又稱虛擬軸機床 (VirtualAxisMachineTool)或并聯運動學機器,是基于并聯機構的新型數控加工設備,實質上是機器人技術、機床結構技術、數控技術等相結合的物,它同時兼顧了機床和機器人的諸多特性,既可以看作是機器人化的機床, 又可以看作是機床化的機器人 。它能夠提供機器人的靈活與柔性,又具有機床的剛度和精度,是集多種功能于一體的新型機電設備。
1、并聯機床的結構
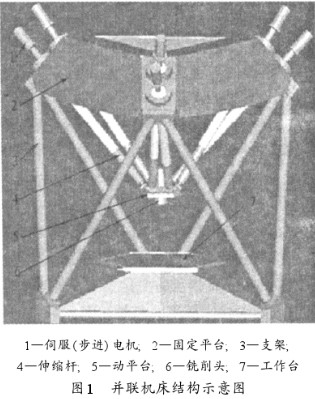
并聯機床結構示意圖見圖1,它由伺服(步進)電機1、固定平臺2、支架3、伸縮桿4、動平臺5、銑削頭6、工作臺7等組成。安裝在固定平臺和動平臺之間的伸縮桿由伺服電機(或步進電機) 驅動,帶動伸縮桿內的滾珠絲杠和螺母運動,使伸縮桿的長度發生變化。由于各伸縮桿(一般為6桿或3桿)的長度發生變化,使得動平臺的位姿發生變化,多個伸縮桿共同運動,驅動動平臺實現上升、下降、翻轉等運動,帶動銑削頭實現工作所需的各種運動。各伸縮桿采用相互獨立的伺服驅動裝置驅動 。
2、開放式的控制系統結構
對于并聯運動機床來說,其最大特點就是機械結構非常簡單,而控制卻異常復雜。并聯運動機床的控制系統必須采用開放式結構。目前,國內外的開放式數控系統主要有如下3種結構形式 。
2.1、專用CNC十PC型
即在傳統的非開放式的專用數控系統中嵌入機,使得整個系統可以共享一些計算機軟硬件資源 。部分完成系統管理等非實時控制任務,實現輔助編程、分析、監控和編排工藝等功能;CNC部分負責完成插補計算、伺服控制以及I/O控制等一些實時控制任務。這種結構形式的數控系統其開放性只在機部分,其專業的數控部分仍處于封閉狀態,不能實現CNC內核的開放,此類結構形式一般為主流數控系統廠商所采用。
2.2、 PC+運動控制
卡這種基于開放式運動控制卡的系統結構是以通用微機為平臺,以標準插件形式的開放式運動控制卡為控制核心。通用PC機實現數控程序編輯 、人機界面管理、外部通信等功能,運動控制卡負責機床的運動控制和邏輯控制。它支持用戶的二次開發和自主擴展,既具有PC機的開放性,又具有專用數控模塊的開放性,可以說它具有上、下兩級的開放性。
2.3、純PC型
即全軟件形式的PC機數控系統,該系統是指的全部功能均由PC機進行處理, 并通過裝在擴展槽中的伺服接口卡對伺服驅動等進行控制。其軟件的通用性好,編程處理靈活,但存在著操作系統的實時性、標準統一性以及系統穩定性等問題。目前這類系統正處于探索階段,還尚未形成產品,但它代表了數控系統的發展方向。
如果著眼于經濟型數控并聯機床控制系統的設計,選擇PC+運動控制卡的開放式數控系統是當前最為理想的。以PC機和運動控制卡為控制系統核心,直接將系統平臺構筑于PC機的軟硬件基礎之上,驅動元件為步進電機,系統在Windows環境下用VC++ 語言實現,軟件的設計采用面向對象的方法。
3、基于PCI總線的并聯機床運動控制卡設計
并聯機床運動控制卡通過控制機床各個驅動桿實現主軸的運動,控制軸數較多,同時還要得到所要求的刀具運動軌跡。要實現刀具的高速、高精度軌跡控制,運動控制卡和PC機存在著大量的數據交互,傳統的方式是采用ISA總線進行,由于ISA總線帶寬限制,數據傳輸速度慢,使PC機在數據傳輸方面花費的時間較多,從而在其它方面的處理時間相對縮小。本系統實現運動控制卡與PC機通信,能夠達到很高的數據傳輸速率,使PC機的處理能力大大增強,從而保證了數控系統的實時性,并且使開發相應的基于平臺的數控軟件更容易,和配套的其它軟件的接口更方便。
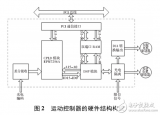
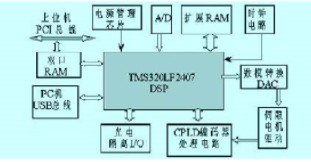
控制系統硬件組成圖見圖2。該系統采用的是公司的32位定點DSP芯片TMS320VC33 。DSP芯片負責接受PCI局部總線的命令和參數,然后通過運動控制算法完成對步進電機的精確運動控制,同時芯片還負責將反饋信息傳輸給PCI局部總線,并且控制系統外圍I/O模塊。DSP與PC機的通信通過橋接芯片CY7C09449PV實現。

3.1、CY7C09449PV與PC機的連接
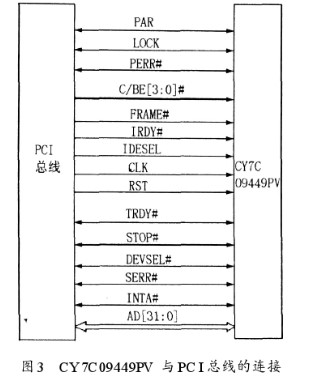
總線是目前應用最廣泛、最流行的一種高速同步總線,具有64位總線寬度,工作頻率33MHz,最大傳輸速率可以達到132Mb/s。它可將外設直接掛到主機CPU局部總線上并以CPU速度運行,可以大大提高外設的運行速度。DSP與PC機的通信通過連。CY7C09449PV是Cypress 公司提供的符合PCI2—2總線規范的功能完善、價格低廉的雙端口RAM 接口芯片。其中,一個端 口是PCI接口,適合與PC機通信;另一端口為本地接口。 它提供主/目標接口, 可以同任何通用微處理器連接,片內有128雙端口存儲器用于局部處理器與PCI總線數據共享。CY7C09449PV與PCI總線的連接見圖3 。
3.2PCI 總線開發方案的實現
專用芯片CY7C09449PV采用3.3V單電源供電,兼容3V和5V的PCI信號環境。電源可由PCI 槽引出,PCI 槽可以提供3.3 V、5V電壓,在PCI 槽需特別注意兩個引腳 P RS NT1 和,這兩個引腳接地和懸空的4種組合直接決定 PCI卡的功率。CY7C09449PV在使用時,某些引腳要加阻值為l kfI ~10kfl的下拉或上拉電阻。根據具體情況, 在該設計中, SCI 、S DA、AIE、/BE[ 2 ] 、RDY —引腳加上拉電阻, TEST—MODE引腳加下拉電阻。
是TI公司新推出的系列新一代浮點DSP,它是在原來浮點DSP的基礎上開發的一個價格更低的版本,該產品以高速、低功耗、低成本、易于開發為顯著的特點。由于它采用了內部1 。 8 V、外部。 3 V供電 ,因而功耗比原有型號降低了大約一個數量級,而且能支持高達150 ×10次/s的運行速度,是需浮點運算的便攜式產品中的一種理想的DSP器件 。
作為控制系統的核心, TMS320VC33主要完成實時中斷的伺服控制程序,包括對各種底層硬件的操作。它采用32 位局部總線接 口方式, 時鐘信號可以是單獨提供的時鐘源,也可以是 CY7C09449PV提供的 PCI 時鐘信號 PCI KOUT[20] 中任意的一個。
4、結束語
并聯機床需要控制的軸數比較多,而且牽涉到并聯機構的正逆解運算,運算量比較大,采用基于總線的運動控制卡,整個數控系統的任務就由PC機和運動控制卡來共同承擔,在開放式數控系統中能夠發揮出理想的運動控制性能。隨著數控系統的普及和產品檔次的提高,這種運動控制卡將會有廣泛的應用前景 。
責任編輯:gt
-
電源
+關注
關注
185文章
18368瀏覽量
256255 -
dsp
+關注
關注
556文章
8157瀏覽量
357485 -
芯片
+關注
關注
459文章
52505瀏覽量
440760 -
控制系統
+關注
關注
41文章
6780瀏覽量
112161
發布評論請先 登錄
【TL6748 DSP申請】基于DSP的四自由度機器人運動控制卡的研究
如何利用DSP與FPGA設計運動控制器?
基于DSP的運動控制系統設計
開放式四軸運動控制器方案


基于DSP和CPLD實現開放式運動控制器的設計






 工商網監
工商網監
評論