") 機(jī)器視覺(jué),智造之眼!
機(jī)器視覺(jué),智造之眼!
機(jī)器視覺(jué)(Machine Vision)作為光電技術(shù)應(yīng)用的一個(gè)特定領(lǐng)域,目前已經(jīng)發(fā)展成為一個(gè)備受矚目的行業(yè)。隨著工業(yè)4.0浪潮襲來(lái),機(jī)器視覺(jué)會(huì)擺脫最初“輔助工具”的地位成為生產(chǎn)系統(tǒng)的“眼睛”與“大腦”。
1.
機(jī)器視覺(jué)解讀
什么是機(jī)器視覺(jué)
機(jī)器視覺(jué)技術(shù)是計(jì)算機(jī)科學(xué)的一個(gè)重要分支,它涉及到計(jì)算機(jī)、圖像處理、模式識(shí)別、人工智能、信號(hào)處理、光學(xué)、機(jī)械等多個(gè)領(lǐng)域,其目的就是給機(jī)器或者自動(dòng)生產(chǎn)線(xiàn)添加一套視覺(jué)系統(tǒng)。機(jī)器視覺(jué)是采用機(jī)器代替人眼來(lái)做測(cè)量與判斷,通過(guò)計(jì)算機(jī)攝取圖像來(lái)模擬人的視覺(jué)功能,實(shí)現(xiàn)人眼視覺(jué)的延伸。
一個(gè)完整的工業(yè)機(jī)器視覺(jué)系統(tǒng)是由眾多功能模塊共同組成,一般由光學(xué)系統(tǒng)(光源、鏡頭、工業(yè)相機(jī))、圖像采集單元、圖像處理單元、執(zhí)行機(jī)構(gòu)及人機(jī)界面等模塊組成,所有功能模塊相輔相成,缺一不可。好的機(jī)器視覺(jué)系統(tǒng)能夠?yàn)橹圃鞓I(yè)提供更多有利于提高產(chǎn)品質(zhì)量和生產(chǎn)效率的硬件支持。
機(jī)器視覺(jué)的目的是給機(jī)器或自動(dòng)生產(chǎn)線(xiàn)添加一套視覺(jué)系統(tǒng),用機(jī)器視覺(jué)系統(tǒng) 代替人眼來(lái)做測(cè)量和判斷。
通過(guò)機(jī)器視覺(jué)產(chǎn)品(即工業(yè)相機(jī))將待檢測(cè)目標(biāo)轉(zhuǎn)換成圖像信號(hào),傳送給圖像處理分析系統(tǒng),得到被攝目標(biāo)的形態(tài)信息,根據(jù)像素分布和亮度、顏色等信息,轉(zhuǎn)變成數(shù)字化信號(hào);圖像系統(tǒng)對(duì)這些信號(hào)進(jìn)行各種運(yùn)算來(lái)抽取目標(biāo)的特征,進(jìn)而根據(jù)判別的結(jié)果來(lái)控制現(xiàn)場(chǎng)設(shè)備的動(dòng)作。
機(jī)器視覺(jué)功能優(yōu)勢(shì)
2.
機(jī)器視覺(jué)系統(tǒng)工作流程
工件到達(dá)檢測(cè)位置→ 向傳感器觸發(fā)脈沖→ 圖像采集卡感應(yīng)物件并開(kāi)始工作→ 零件照明→工業(yè)攝像機(jī)等待掃描并輸出→ 圖像采集卡將數(shù)字圖像存放到計(jì)算機(jī)內(nèi)存中→處理器獲取圖像并把資料數(shù)據(jù)化→ 視覺(jué)軟件對(duì)圖像進(jìn)行分析、識(shí)別→ 獲取測(cè)量結(jié)果→ 離散輸出,顯示不良產(chǎn)品畫(huà)面→控制流水線(xiàn)的動(dòng)作或糾正誤差。
▲字小點(diǎn)擊放大看圖
從上述的工作流程可以看出,機(jī)器視覺(jué)系統(tǒng)是一種比較復(fù)雜的系統(tǒng),因?yàn)榇蠖鄶?shù)系統(tǒng)的監(jiān)控對(duì)象都是運(yùn)動(dòng)物體,系統(tǒng)與運(yùn)動(dòng)物體的匹配和協(xié)調(diào)動(dòng)作尤為重要,這些給系統(tǒng)各部分的動(dòng)作時(shí)間和處理速度帶來(lái)了嚴(yán)格的要求。
在一些應(yīng)用領(lǐng)域,例如機(jī)器人、飛行物制導(dǎo)等,整個(gè)系統(tǒng)或者系統(tǒng)的一些部件的重量、體積和耗電量都會(huì)有嚴(yán)格的要求。所以說(shuō),機(jī)器視覺(jué)是圖像處理系統(tǒng)中最復(fù)雜的系統(tǒng),需要在開(kāi)發(fā)和設(shè)計(jì)中投入更多的精力。
3.
機(jī)器視覺(jué)系統(tǒng)的優(yōu)勢(shì)
在工業(yè)生產(chǎn)的過(guò)程中,機(jī)器視覺(jué)相對(duì)于人眼識(shí)別體現(xiàn)了較大優(yōu)勢(shì)。機(jī)器視覺(jué)具有自動(dòng)化、客觀、非接觸和高精度等特點(diǎn)。特別是在工業(yè)生產(chǎn)領(lǐng)域,機(jī)器視覺(jué)強(qiáng)調(diào)生產(chǎn)的精度和速度,以及工業(yè)現(xiàn)場(chǎng)環(huán)境下的可靠性與安全性,在重復(fù)和機(jī)械性的工作中具有較大的應(yīng)用價(jià)值。
精確性——由于人眼有物理?xiàng)l件的限制,在精確性上機(jī)器有明顯的優(yōu)點(diǎn)。即使人眼依靠放大鏡或顯微鏡來(lái)檢測(cè)產(chǎn)品,機(jī)器仍然會(huì)更加精確,因?yàn)樗木饶軌蜻_(dá)到千分之一英寸。特別是檢測(cè)生產(chǎn)線(xiàn)上高速運(yùn)動(dòng)的物體時(shí),機(jī)器視覺(jué)更具優(yōu)勢(shì)。
重復(fù)性——機(jī)器可以以相同的方法一次一次的完成檢測(cè)工作而不會(huì)感到疲倦。與此相反,人眼每次檢測(cè)產(chǎn)品時(shí)都會(huì)有細(xì)微的不同,即使產(chǎn)品時(shí)完全相同的。
客觀性——人眼檢測(cè)還有一個(gè)致命的缺陷,就是情緒帶來(lái)的主觀性,檢測(cè)結(jié)果會(huì)隨工人心情的好壞產(chǎn)生變化,而機(jī)器沒(méi)有喜怒哀樂(lè),檢測(cè)的結(jié)果自然非常可觀可靠。
效率高——機(jī)器視覺(jué)系統(tǒng)可以快速獲取大量信息,實(shí)現(xiàn)更為快速的產(chǎn)品檢測(cè),同時(shí)也易于加工過(guò)程中的信息集成,尤其是在大批量工業(yè)生產(chǎn)過(guò)程中,用人工視覺(jué)檢查產(chǎn)品質(zhì)量效率低且精度不高,用機(jī)器視覺(jué)檢測(cè)方法可以大大提高生產(chǎn)效率和生產(chǎn)的自動(dòng)化程度。
成本低——由于機(jī)器比人快,一臺(tái)自動(dòng)檢測(cè)機(jī)器能夠承擔(dān)多人的任務(wù)。而且機(jī)器不需要停頓、能夠連續(xù)工作,所以能夠極大的提高生產(chǎn)效率從而降低生產(chǎn)成本。
4.
機(jī)器視覺(jué)典型應(yīng)用場(chǎng)景
生產(chǎn)車(chē)間組裝
機(jī)器人在機(jī)器視覺(jué)技術(shù)的作用下,可以精確地按照視覺(jué)技術(shù)使機(jī)械手臂擁有3D視覺(jué)能力,可以靠視覺(jué)導(dǎo)引、定位,成為夾取物件的要件。除了視覺(jué)定位,手眼力協(xié)調(diào)機(jī)器人的關(guān)鍵技術(shù)還有矩陣的感測(cè)器,可以協(xié)助機(jī)器人知道抓取的位置與力量大小。
電子焊接制造
在焊線(xiàn)技術(shù)中,因?yàn)樾酒S度的縮小,需要較強(qiáng)大的影像放大功能。在此環(huán)境中,高質(zhì)量的成像鏡頭系統(tǒng)必須滿(mǎn)足特殊的最佳化需求。由于機(jī)器視覺(jué)工具絕佳的操作模式、可靠度及視覺(jué)算法的高準(zhǔn)確度,從而很好地解決了芯片焊接過(guò)程中的諸多問(wèn)題。
空瓶檢測(cè)
機(jī)器視覺(jué)空瓶檢測(cè)系統(tǒng)主要由相機(jī)、鏡頭、光源、圖像采集卡、PC平臺(tái)和控制單元等六部分組成,各個(gè)部分之間相互配合,最終完成對(duì)酒瓶的質(zhì)量檢測(cè)和剔除。
汽車(chē)零部件裝配
汽車(chē)零部件具有品質(zhì)要求高、批量大、形狀各異的特點(diǎn),每一個(gè)零件都涉及到整車(chē)的質(zhì)量,故其測(cè)量的尺寸多,精度要求高,需要根據(jù)不同的零部件特征與類(lèi)型進(jìn)行逐一測(cè)量。目前大部分汽車(chē)制造商,已使用機(jī)器視覺(jué)系統(tǒng)取代了普通的三坐標(biāo)測(cè)量機(jī)。
產(chǎn)品自動(dòng)化分揀
自動(dòng)化分揀是工業(yè)生產(chǎn)、特別是產(chǎn)品批量生產(chǎn)中的必需環(huán)節(jié)之一。工業(yè)生產(chǎn)中需要根據(jù)產(chǎn)品特性及其生產(chǎn)/出廠質(zhì)量要求進(jìn)行分揀,它可以代替人工進(jìn)行貨物的分類(lèi)、搬運(yùn)和裝卸工作,提高生產(chǎn)和工作效率,從而實(shí)現(xiàn)自動(dòng)化、智能化、無(wú)人化。
藥品質(zhì)量檢測(cè)
機(jī)器視覺(jué)在醫(yī)療領(lǐng)域的應(yīng)用已經(jīng)從傳統(tǒng)的藥品包裝、藥瓶、標(biāo)簽等視覺(jué)檢測(cè)到目前對(duì)生物芯片的檢測(cè),放射科的X放射等,通過(guò)引入機(jī)器視覺(jué)系統(tǒng),完成對(duì)圖像信息的采集、存儲(chǔ)、管理、處理及傳輸?shù)裙δ堋?/p>
5.
機(jī)器視覺(jué)未來(lái)發(fā)展趨勢(shì)
▲字小點(diǎn)擊放大看圖
6.
機(jī)器視覺(jué)主流供應(yīng)商
來(lái)源:e-works
完整的機(jī)器視覺(jué)系統(tǒng)的主要工作過(guò)程有哪些?
機(jī)器視覺(jué)技術(shù)是計(jì)算機(jī)學(xué)科的一個(gè)重要分支,它綜合了光學(xué)、機(jī)械、電子、計(jì)算機(jī)軟硬件等方面的技術(shù),涉及到計(jì)算機(jī)、圖像處理、模式識(shí)別、人工智能、信號(hào)處理、光機(jī)電一體化等多個(gè)領(lǐng)域。自起步發(fā)展至今,機(jī)器視覺(jué)已經(jīng)有20多年的歷史,其功能以及應(yīng)用范圍隨著工業(yè)自動(dòng)化的發(fā)展逐漸完善和推廣,其中特別是目前的數(shù)字圖像傳感器、CMOS和CCD攝像機(jī)、DSP、FPGA、ARM等嵌入式技術(shù)、圖像處理和模式識(shí)別等技術(shù)的快速發(fā)展,大大地推動(dòng)了機(jī)器視覺(jué)的發(fā)展。
簡(jiǎn)而言之,機(jī)器視覺(jué)就是利用機(jī)器代替人眼來(lái)作各種測(cè)量和判斷。在生產(chǎn)線(xiàn)上,人來(lái)做此類(lèi)測(cè)量和判斷會(huì)因疲勞、個(gè)人之間的差異等產(chǎn)生誤差和錯(cuò)誤,但是機(jī)器卻會(huì)不知疲倦地、穩(wěn)定地進(jìn)行下去。一般來(lái)說(shuō),機(jī)器視覺(jué)系統(tǒng)包括了照明系統(tǒng)、鏡頭、攝像系統(tǒng)和圖像處理系統(tǒng)。對(duì)于每一個(gè)應(yīng)用,我們都需要考慮系統(tǒng)的運(yùn)行速度和圖像的處理速度、使用彩色還是黑白攝像機(jī)、檢測(cè)目標(biāo)的尺寸還是檢測(cè)目標(biāo)有無(wú)缺陷、視場(chǎng)需要多大、分辨率需要多高、對(duì)比度需要多大等。從功能上來(lái)看,典型的機(jī)器視覺(jué)系統(tǒng)可以分為:圖像采集部分、圖像處理部分和運(yùn)動(dòng)控制部分。
一個(gè)完整的機(jī)器視覺(jué)系統(tǒng)的主要工作過(guò)程如下:1、工件定位檢測(cè)器探測(cè)到物體已經(jīng)運(yùn)動(dòng)至接近攝像系統(tǒng)的視野中心,向圖像采集部分發(fā)送觸發(fā)脈沖。2、圖像采集部分按照事先設(shè)定的程序和延時(shí),分別向攝像機(jī)和照明系統(tǒng)發(fā)出啟動(dòng)脈沖。3、攝像機(jī)停止目前的掃描,重新開(kāi)始新的一幀掃描,或者攝像機(jī)在啟動(dòng)脈沖來(lái)到之前處于等待狀態(tài),啟動(dòng)脈沖到來(lái)后啟動(dòng)一幀掃描。4、攝像機(jī)開(kāi)始新的一幀掃描之前打開(kāi)曝光機(jī)構(gòu),曝光時(shí)間可以事先設(shè)定。5、另一個(gè)啟動(dòng)脈沖打開(kāi)燈光照明,燈光的開(kāi)啟時(shí)間應(yīng)該與攝像機(jī)的曝光時(shí)間匹配。6、攝像機(jī)曝光后,正式開(kāi)始一幀圖像的掃描和輸出。7、圖像采集部分接收模擬視頻信號(hào)通過(guò)A/D將其數(shù)字化,或者是直接接收攝像機(jī)數(shù)字化后的數(shù)字視頻數(shù)據(jù)。8、圖像采集部分將數(shù)字圖像存放在處理器或計(jì)算機(jī)的內(nèi)存中。9、處理器對(duì)圖像進(jìn)行處理、分析、識(shí)別,獲得測(cè)量結(jié)果或邏輯控制值。10、處理結(jié)果控制流水線(xiàn)的動(dòng)作、進(jìn)行定位、糾正運(yùn)動(dòng)的誤差等。從上述的工作流程可以看出,機(jī)器視覺(jué)是一種比較復(fù)雜的系統(tǒng)。因?yàn)榇蠖鄶?shù)系統(tǒng)監(jiān)控對(duì)象都是運(yùn)動(dòng)物體,系統(tǒng)與運(yùn)動(dòng)物體的匹配和協(xié)調(diào)動(dòng)作尤為重要,所以給系統(tǒng)各部分的動(dòng)作時(shí)間和處理速度帶來(lái)了嚴(yán)格的要求。在某些應(yīng)用領(lǐng)域,例如機(jī)器人、飛行物體導(dǎo)制等,對(duì)整個(gè)機(jī)器視覺(jué)系統(tǒng)或者系統(tǒng)的一部分的重量、體積和功耗都會(huì)有嚴(yán)格的要求。機(jī)器視覺(jué)系統(tǒng)的優(yōu)點(diǎn)有:1、非接觸測(cè)量,對(duì)于觀測(cè)者與被觀測(cè)者都不會(huì)產(chǎn)生任何損傷,從而提高系統(tǒng)的可靠性。2、機(jī)器視覺(jué)系統(tǒng)具有較寬的光譜響應(yīng)范圍,例如使用人眼看不見(jiàn)的紅外測(cè)量,擴(kuò)展了人眼的視覺(jué)范圍。3、長(zhǎng)時(shí)間穩(wěn)定工作,人類(lèi)難以長(zhǎng)時(shí)間對(duì)同一對(duì)象進(jìn)行觀察,而機(jī)器視覺(jué)則可以長(zhǎng)時(shí)間地作測(cè)量、分析和識(shí)別任務(wù)。機(jī)器視覺(jué)系統(tǒng)的應(yīng)用領(lǐng)域越來(lái)越廣泛。在工業(yè)、農(nóng)業(yè)、國(guó)防、交通、醫(yī)療、金融甚至體育、娛樂(lè)等等行業(yè)都獲得了廣泛的應(yīng)用,可以說(shuō)已經(jīng)深入到我們的生活、生產(chǎn)和工作的方方面面。
機(jī)器視覺(jué)原理解析及其應(yīng)用實(shí)例
機(jī)器視覺(jué)系統(tǒng)的特點(diǎn)是提高生產(chǎn)的柔性和自動(dòng)化程度。在一些不適合于人工作業(yè)的危險(xiǎn)工作環(huán)境或人工視覺(jué)難以滿(mǎn)足要求的場(chǎng)合,常用機(jī)器視覺(jué)來(lái)替代人工視覺(jué);同時(shí)在大批量工業(yè)生產(chǎn)過(guò)程中,用人工視覺(jué)檢查產(chǎn)品質(zhì)量效率低且精度不高,用機(jī)器視覺(jué)檢測(cè)方法可以大大提高生產(chǎn)效率和生產(chǎn)的自動(dòng)化程度。
而且機(jī)器視覺(jué)易于實(shí)現(xiàn)信息集成,是實(shí)現(xiàn)計(jì)算機(jī)集成制造的基礎(chǔ)技術(shù)。正是由于機(jī)器視覺(jué)系統(tǒng)可以快速獲取大量信息,而且易于自動(dòng)處理,也易于同設(shè)計(jì)信息以及加工控制信息集成,因此,在現(xiàn)代自動(dòng)化生產(chǎn)過(guò)程中,人們將機(jī)器視覺(jué)系統(tǒng)廣泛地用于工況監(jiān)視、成品檢驗(yàn)和質(zhì)量控制等領(lǐng)域。
基本構(gòu)造一個(gè)典型的工業(yè)機(jī)器視覺(jué)系統(tǒng)包括:光源、鏡頭、相機(jī)(包括CCD 相機(jī)和COMS相機(jī))、圖像處理單元(或圖像捕獲卡)、圖像處理軟件、監(jiān)視器、通訊 / 輸入輸出單元等。
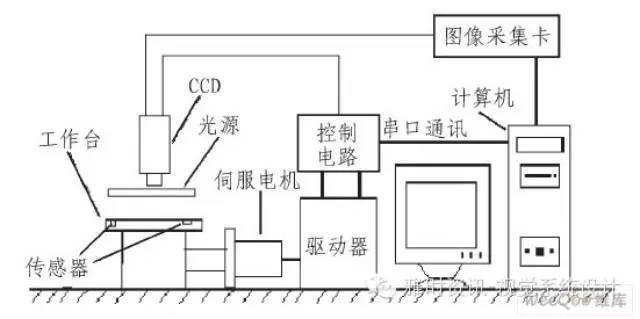
系統(tǒng)可再分為主端電腦(Host Computer)、影像擷取卡(Frame Grabber)與影像處理器、影像攝影機(jī)、CCT鏡頭、顯微鏡頭、照明設(shè)備、Halogen光源、LED光源、高周波螢光燈源、閃光燈源、其他特殊光 源、影像顯示器、LC機(jī)構(gòu)及控制系統(tǒng)、PLC、PC-Base控制器、精密桌臺(tái)、伺服運(yùn)動(dòng)機(jī)臺(tái)。
工作原理機(jī)器視覺(jué)檢測(cè)系統(tǒng)采用CCD照相機(jī)將被檢測(cè)的目標(biāo)轉(zhuǎn)換成圖像信號(hào),傳送給專(zhuān)用的圖像處理系統(tǒng),根據(jù)像素分布和亮度、顏色等信息,轉(zhuǎn)變成數(shù)字化信號(hào),圖像處理系統(tǒng)對(duì)這些信號(hào)進(jìn)行各種運(yùn)算來(lái)抽取目標(biāo)的特征,如面積、數(shù)量、位置、長(zhǎng)度,再根據(jù)預(yù)設(shè)的允許度和其他條件輸出結(jié)果,包括尺寸、角度、個(gè)數(shù)、合格/不合格、有/無(wú)等,實(shí)現(xiàn)自動(dòng)識(shí)別功能。
機(jī)器視覺(jué)系統(tǒng)的典型結(jié)構(gòu)
照明照明是影響機(jī)器視覺(jué)系統(tǒng)輸入的重要因素,它直接影響輸入數(shù)據(jù)的質(zhì)量和應(yīng)用效果。由于沒(méi)有通用的機(jī)器視覺(jué)照明設(shè)備,所以針對(duì)每個(gè)特定的應(yīng)用實(shí)例,要選擇 相應(yīng)的照明裝置,以達(dá)到最佳效果。
光源可分為可見(jiàn)光和不可見(jiàn)光。常用的幾種可見(jiàn)光源是白幟燈、日光燈、水銀燈和鈉光燈。可見(jiàn)光的缺點(diǎn)是光能不能保持穩(wěn)定。如何使光能在一定的程度上保持穩(wěn)定,是實(shí)用化過(guò)程中急需要解決的問(wèn)題。另一方面,環(huán)境光有可能影響圖像的質(zhì)量,所以可采用加防護(hù)屏的方法來(lái)減少環(huán)境光的影響。照明系統(tǒng)按其照射方法可分為:背向照明、前向照明、結(jié)構(gòu)光和頻閃光照明等。
其中,背向照明是被測(cè)物放在光源和攝像機(jī)之間,它的優(yōu)點(diǎn)是能獲得高對(duì)比度的圖像。前向照明是光源和攝像機(jī)位于被測(cè)物的同側(cè),這種方式便于安裝。
結(jié)構(gòu)光照明是將光柵或線(xiàn)光源等投射到被測(cè)物上,根據(jù)它們產(chǎn)生的畸變,解調(diào)出被測(cè)物的三維信息。頻閃光照明是將高頻率的光脈沖照射到物體上,攝像機(jī)拍攝要求與光源同步。
鏡頭FOV(Field Of Vision)=所需分辨率*亞象素*相機(jī)尺寸/PRTM(零件測(cè)量公差比)鏡頭選擇應(yīng)注意:①焦距②目標(biāo)高度 ③影像高度 ④放大倍數(shù) ⑤影像至目標(biāo)的距離 ⑥中心點(diǎn) /節(jié)點(diǎn) ⑦畸變
相機(jī)按照不同標(biāo)準(zhǔn)可分為:標(biāo)準(zhǔn)分辨率數(shù)字相機(jī)和模擬相機(jī)等。要根據(jù)不同的實(shí)際應(yīng)用場(chǎng)合選不同的相機(jī)和高分辨率相機(jī):線(xiàn)掃描CCD和面陣CCD;單色相機(jī)和彩色相機(jī)。
圖像采集卡
圖像采集卡只是完整的機(jī)器視覺(jué)系統(tǒng)的一個(gè)部件,但是它扮演一個(gè)非常重要的角色。圖像采集卡直接決定了攝像頭的接口:黑白、彩色、模擬、數(shù)字等等。
比較典型的是PCI或AGP兼容的捕獲卡,可以將圖像迅速地傳送到計(jì)算機(jī)存儲(chǔ)器進(jìn)行處理。有些采集卡有內(nèi)置的多路開(kāi)關(guān)。
例如,可以連接8個(gè)不同的攝像 機(jī),然后告訴采集卡采用那一個(gè)相機(jī)抓拍到的信息。有些采集卡有內(nèi)置的數(shù)字輸入以觸發(fā)采集卡進(jìn)行捕捉,當(dāng)采集卡抓拍圖像時(shí)數(shù)字輸出口就觸發(fā)閘門(mén)。
視覺(jué)處理器視覺(jué)處理器集采集卡與處理器于一體。以往計(jì)算機(jī)速度較慢時(shí),采用視覺(jué)處理器加快視覺(jué)處理任務(wù)。現(xiàn)在由于采集卡可以快速傳輸圖像到存儲(chǔ)器,而且計(jì)算機(jī)也快多了,所以現(xiàn)在視覺(jué)處理器用的較少了。
應(yīng)用領(lǐng)域
機(jī)器視覺(jué)的應(yīng)用主要有檢測(cè)和機(jī)器人視覺(jué)兩個(gè)方面:1. 檢測(cè):又可分為高精度定量檢測(cè)(例如顯微照片的細(xì)胞分類(lèi)、機(jī)械零部件的尺寸和位置測(cè)量)和不用量器的定性或半定量檢測(cè)(例如產(chǎn)品的外觀檢查、裝配線(xiàn)上的零部件識(shí)別定位、缺陷性檢測(cè)與裝配完全性檢測(cè))。
2. 機(jī)器人視覺(jué):用于指引機(jī)器人在大范圍內(nèi)的操作和行動(dòng),如從料斗送出的雜亂工件堆中揀取工件并按一定的方位放在傳輸帶或其他設(shè)備上(即料斗揀取問(wèn)題)。至于小范圍內(nèi)的操作和行動(dòng),還需要借助于觸覺(jué)傳感技術(shù)。
此外還有:(1)自動(dòng)光學(xué)檢查(2)人臉偵測(cè)(3)無(wú)人駕駛汽車(chē)
機(jī)器視覺(jué)特性1.攝像機(jī)的拍照速度自動(dòng)與被測(cè)物的速度相匹配,拍攝到理想的圖像;2.零件的尺寸范圍為2.4mm到12mm,厚度可以不同;3.系統(tǒng)根據(jù)操作者選擇不同尺寸的工件,調(diào)用相應(yīng)視覺(jué)程序進(jìn)行尺寸檢測(cè),并輸出結(jié)果;4.針對(duì)不同尺寸的零件,排序裝置和輸送裝置可以精確調(diào)整料道的寬度,使零件在固定路徑上運(yùn)動(dòng)并進(jìn)行視覺(jué)檢測(cè);5.機(jī)器視覺(jué)系統(tǒng)分辨率達(dá)到1600×1200,動(dòng)態(tài)檢測(cè)精度可以達(dá)到0.02mm;6.廢品漏檢率為0;7.本系統(tǒng)可通過(guò)顯示圖像監(jiān)視檢測(cè)過(guò)程,也可通過(guò)界面顯示的檢測(cè)數(shù)據(jù)動(dòng)態(tài)查看檢測(cè)結(jié)果;8.具有對(duì)錯(cuò)誤工件及時(shí)準(zhǔn)確發(fā)出剔除控制信號(hào)、剔除廢品的功能;9.系統(tǒng)能夠自檢其主要設(shè)備的狀態(tài)是否正常,配有狀態(tài)指示燈;同時(shí)能夠設(shè)置系統(tǒng)維護(hù)人員、使用人員不同的操作權(quán)限;10.實(shí)時(shí)顯示檢測(cè)畫(huà)面,中文界面,可以瀏覽最近幾次不合格品的圖像,具有能夠存儲(chǔ)和實(shí)時(shí)察看錯(cuò)誤工件圖像的功能;11.能生成錯(cuò)誤結(jié)果信息文件,包含對(duì)應(yīng)的錯(cuò)誤圖像,并能打印輸出。
應(yīng)用實(shí)例
1. 基于機(jī)器視覺(jué)的儀表板總成智能集成測(cè)試系統(tǒng)EQ140-II汽車(chē)儀表板總成是我國(guó)某汽車(chē)公司生產(chǎn)的儀表產(chǎn)品,儀表板上安裝有速度里程表、水溫表、汽油表、電流表、信號(hào)報(bào)警燈等,其生產(chǎn)批量大,出廠前需要進(jìn)行一次質(zhì)量終檢。
檢測(cè)項(xiàng)目包括:檢測(cè)速度表等五個(gè)儀表指針的指示誤差;檢測(cè)24個(gè)信號(hào)報(bào)警燈和若干照明9燈是否損壞或漏裝。一般采用人工目測(cè)方法檢查,誤差大,可靠性差,不能滿(mǎn)足自動(dòng)化生產(chǎn)的需要。
基于機(jī)器視覺(jué)的智能集成測(cè)試系統(tǒng),改變了這種現(xiàn)狀,實(shí)現(xiàn)了對(duì)儀表板總成智能化、全自動(dòng)、高精度、 快速質(zhì)量檢測(cè),克服了人工檢測(cè)所造成的各種誤差,大大提高了檢測(cè)效率。
整個(gè)系統(tǒng)分為四個(gè)部分:為儀表板提供模擬信號(hào)源的集成化多路標(biāo)準(zhǔn)信號(hào)源、具有圖像信息反饋定位的雙坐標(biāo)CNC系統(tǒng)、攝像機(jī)圖像獲取系統(tǒng)和主從機(jī)平行處理系統(tǒng)。
2. 金屬板表面自動(dòng)控傷系統(tǒng)金屬板如大型電力變壓器線(xiàn)圈扁平線(xiàn)收音機(jī)朦朧皮等的表面質(zhì)量都有很高的要求,但原始的采用人工目視或用百分表加控針的檢測(cè)方法不僅易受主觀因素的影響,而且可能會(huì)繪被測(cè)表面帶來(lái)新的劃傷。
金屬板表面自動(dòng)探傷系統(tǒng)利用機(jī)器視覺(jué)技術(shù)對(duì)金屬表面缺陷進(jìn)行自動(dòng)檢查,在生產(chǎn)過(guò)程中高速、準(zhǔn)確地進(jìn)行檢測(cè),同時(shí)由于采用非接角式測(cè)量,避免了產(chǎn)生新劃傷的可能。
其工作原理圖如圖8-6所示;在此系統(tǒng)中,采用激光器作為光源,通過(guò)針孔濾波器濾除激光束周?chē)碾s散光,擴(kuò) 束鏡和準(zhǔn)直鏡使激光束變?yōu)槠叫泄獠⒁?5度的入射角均勻照明被檢查的金屬板表面。金屬板放在檢驗(yàn)臺(tái)上。
檢驗(yàn)臺(tái)可在X、Y、Z三個(gè)方向上移動(dòng),攝像機(jī)采用 TCD142D型2048線(xiàn)陳CCD,鏡頭采用普通照相機(jī)鏡頭。
CCD接口電路采用單片機(jī)系統(tǒng)。主機(jī)PC機(jī)主要完成圖像預(yù)處理及缺陷的分類(lèi)或劃痕的深度運(yùn) 算等,并可將檢測(cè)到的缺陷或劃痕圖像在顯示器上顯示。
CCD接口電路和PC機(jī)之間通過(guò)RS-232口進(jìn)行雙向通訊,結(jié)合異步A/D轉(zhuǎn)換方式,構(gòu)成人機(jī)交互 式的數(shù)據(jù)采集與處理。
該系統(tǒng)主要利用線(xiàn)陣CCD的自?huà)呙杼匦耘c被檢查鋼板X(qián)方向的移動(dòng)相結(jié)合,取得金屬板表面的三維圖像信息。
3. 汽車(chē)車(chē)身檢測(cè)系統(tǒng)英國(guó)ROVER汽車(chē)公司800系列汽車(chē)車(chē)身輪廓尺寸精度的100%在線(xiàn)檢測(cè),是機(jī)器視覺(jué)系統(tǒng)用于工業(yè)檢測(cè)中的一個(gè)較為典型的例子,該系統(tǒng)由62個(gè)測(cè)量 單元組成,每個(gè)測(cè)量單元包括一臺(tái)激光器和一個(gè)CCD攝像機(jī),用以檢測(cè)車(chē)身外殼上288個(gè)測(cè)量點(diǎn)。汽車(chē)車(chē)身置于測(cè)量框架下,通過(guò)軟件校準(zhǔn)車(chē)身的精確位置。
測(cè)量單元的校準(zhǔn)將會(huì)影響檢測(cè)精度,因而受到特別重視。每個(gè)激光器/攝像機(jī)單元均在離線(xiàn)狀態(tài)下經(jīng)過(guò)校準(zhǔn)。同時(shí)還有一個(gè)在離線(xiàn)狀態(tài)下用三坐標(biāo)測(cè)量機(jī)校準(zhǔn)過(guò)的校準(zhǔn)裝置,可對(duì)攝像頂進(jìn)行在線(xiàn)校準(zhǔn)。
檢測(cè)系統(tǒng)以每40秒檢測(cè)一個(gè)車(chē)身的速度,檢測(cè)三種類(lèi)型的車(chē)身。系統(tǒng)將檢測(cè)結(jié)果與人、從CAD模型中撮出來(lái)的合格尺寸相比較,測(cè)量精度為±0.1mm。 ROVER的質(zhì)量檢測(cè)人員用該系統(tǒng)來(lái)判別關(guān)鍵部分的尺寸一致性,如車(chē)身整體外型、門(mén)、玻璃窗口等。實(shí)踐證明,該系統(tǒng)是成功的,并將用于ROVER公司其 它系統(tǒng)列汽車(chē)的車(chē)身檢測(cè)。
4. 紙幣印刷質(zhì)量檢測(cè)系統(tǒng):該系統(tǒng)利用圖像處理技術(shù),通過(guò)對(duì)紙幣生產(chǎn)流水線(xiàn)上的紙幣20多項(xiàng)特征(號(hào)碼、盲文、顏色、圖案等)進(jìn)行比較分析,檢測(cè)紙幣的質(zhì)量,替代傳統(tǒng)的人眼辨別的方法。
5. 智能交通管理系統(tǒng):通過(guò)在交通要道放置攝像頭,當(dāng)有違章車(chē)輛(如闖紅燈)時(shí),攝像頭將車(chē)輛的牌照拍攝下來(lái),傳輸給中央管理系統(tǒng),系統(tǒng)利用圖像處理技術(shù),對(duì)拍攝的圖片進(jìn)行分析,提取出車(chē)牌號(hào),存儲(chǔ)在數(shù)據(jù)庫(kù)中,可以供管理人員進(jìn)行檢索。
6.金相分析:金相圖象分析系統(tǒng)能對(duì)金屬或其它材料的基體組織、雜質(zhì)含量、組織成分等進(jìn)行精確、客觀地分析,為產(chǎn)品質(zhì)量提供可靠的依據(jù)。
7. 醫(yī)療圖像分析:血液細(xì)胞自動(dòng)分類(lèi)計(jì)數(shù)、染色體分析、癌癥細(xì)胞識(shí)別等。
8. 瓶裝啤酒生產(chǎn)
流水線(xiàn)檢測(cè)系統(tǒng):可以檢測(cè)啤酒是否達(dá)到標(biāo)準(zhǔn)的容量、啤酒標(biāo)簽是否完整
9. 大型工件平行度、垂直度測(cè)量?jī)x:采用激光掃描與CCD探測(cè)系統(tǒng)的大型工件平行度、垂直度測(cè)量?jī)x,它以穩(wěn)定的準(zhǔn)直激光束為測(cè)量基線(xiàn),配以回轉(zhuǎn)軸系,旋轉(zhuǎn)五角 標(biāo)棱鏡掃出互相平行或垂直的基準(zhǔn)平面,將其與被測(cè)大型工件的各面進(jìn)行比較。在加工或安裝大型工件時(shí),可用該認(rèn)錯(cuò)器測(cè)量面間的平行度及垂直度。
10. 螺紋鋼外形輪廓尺寸的探測(cè)器件:以頻閃光作為照明光源,利用面陳和線(xiàn)陳CCD作為螺紋鋼外形輪廓尺寸的探測(cè)器件,實(shí)現(xiàn)熱軋螺紋鋼幾何參數(shù)在線(xiàn)測(cè)量的動(dòng)態(tài)檢測(cè)系統(tǒng)。
11.軸承實(shí)時(shí)監(jiān)控:視覺(jué)技術(shù)實(shí)時(shí)監(jiān)控軸承的負(fù)載和溫度變化,消除過(guò)載和過(guò)熱的危險(xiǎn)。將傳統(tǒng)上通過(guò)測(cè)量滾珠表面保證加工質(zhì)量和安全操作的被動(dòng)式測(cè)量變?yōu)橹鲃?dòng)式監(jiān)控。
12. 金屬表面的裂紋測(cè)量:用微波作為信號(hào)源,根據(jù)微波發(fā)生器發(fā)出不同波濤率的方波,測(cè)量金屬表面的裂紋,微波的波的頻率越高,可測(cè)的裂紋越狹小。
機(jī)器視覺(jué)在智能制造應(yīng)用
工業(yè)4.0離不開(kāi)智能制造,智能制造離不開(kāi)機(jī)器視覺(jué)。2015年我國(guó)機(jī)器視覺(jué)市場(chǎng)全球占比8.3%,增速超20%,機(jī)器視覺(jué)為我國(guó)工業(yè)自動(dòng)化打開(kāi)“新視界”。
智能制造的視覺(jué)入口
簡(jiǎn)介及分類(lèi)
機(jī)器視覺(jué)是指利用相機(jī)、攝像機(jī)等傳感器,配合機(jī)器視覺(jué)算法賦予智能設(shè)備人眼的功能,從而進(jìn)行物體的識(shí)別、檢測(cè)、測(cè)量等功能。機(jī)器視覺(jué)可以分為工業(yè)視覺(jué)、計(jì)算機(jī)視覺(jué)兩類(lèi)。
機(jī)器視覺(jué)分類(lèi)(來(lái)源:網(wǎng)絡(luò))
構(gòu)成及原理
機(jī)器視覺(jué)系統(tǒng)一般由燈源、鏡頭、工業(yè)相機(jī)、圖像采集卡、圖像處理單元和視覺(jué)處理軟件構(gòu)成。
機(jī)器視覺(jué)系統(tǒng)構(gòu)成及工作原理(來(lái)源:物聯(lián)中國(guó))
優(yōu)勢(shì)及特點(diǎn)
機(jī)器視覺(jué)具有高度自動(dòng)化、高效率、高精度和適應(yīng)較差環(huán)境的優(yōu)點(diǎn)。
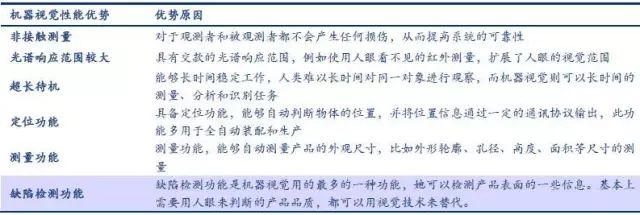
機(jī)器視覺(jué)性能優(yōu)勢(shì)原理(來(lái)源:工控網(wǎng))
是實(shí)現(xiàn)智能制造的必要手段
如果說(shuō)工業(yè)機(jī)器人是人類(lèi)手的延伸、交通工具是人類(lèi)腿的延伸,那么機(jī)器視覺(jué)就相當(dāng)于人類(lèi)視覺(jué)在機(jī)器上的延伸。機(jī)器視覺(jué)實(shí)現(xiàn)了對(duì)工件尺寸、形狀、顏色等特征的自動(dòng)判斷和識(shí)別,可以讓機(jī)器代替人眼做測(cè)量和判斷,是實(shí)現(xiàn)工業(yè)自動(dòng)化和智能化的必要手段。
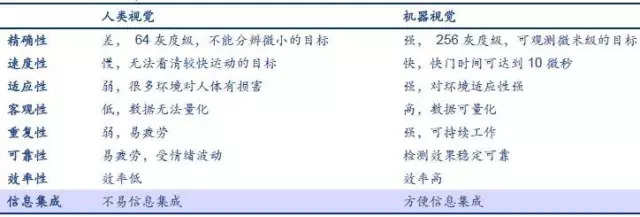
機(jī)器視覺(jué)與人類(lèi)視覺(jué)對(duì)比(來(lái)源:工控網(wǎng))
機(jī)器視覺(jué)應(yīng)用于智能制造領(lǐng)域的功能(來(lái)源:康耐視)
機(jī)器視覺(jué)下游應(yīng)用現(xiàn)狀
應(yīng)用廣泛
作為一種給機(jī)器人帶來(lái)視覺(jué)功能的關(guān)鍵技術(shù),機(jī)器視覺(jué)應(yīng)用廣泛。從工業(yè)視覺(jué)到計(jì)算機(jī)視覺(jué),從人機(jī)交互到自動(dòng)駕駛,從虛擬現(xiàn)實(shí)到物體自動(dòng)識(shí)別,機(jī)器視覺(jué)都能擔(dān)當(dāng)著重要角色。
機(jī)器視覺(jué)應(yīng)用領(lǐng)域
工業(yè)領(lǐng)域
工業(yè)機(jī)器人領(lǐng)域的機(jī)器視覺(jué)下游市場(chǎng)主要是半導(dǎo)體及電子制造、汽車(chē)、食品與包裝和制藥行業(yè),其他如煙草、農(nóng)業(yè)、機(jī)械零部件等也是機(jī)器視覺(jué)應(yīng)用的重要行業(yè)。
機(jī)器視覺(jué)在包裝機(jī)械和機(jī)械零部件應(yīng)用示例(來(lái)源:BANNER 、FANUC )
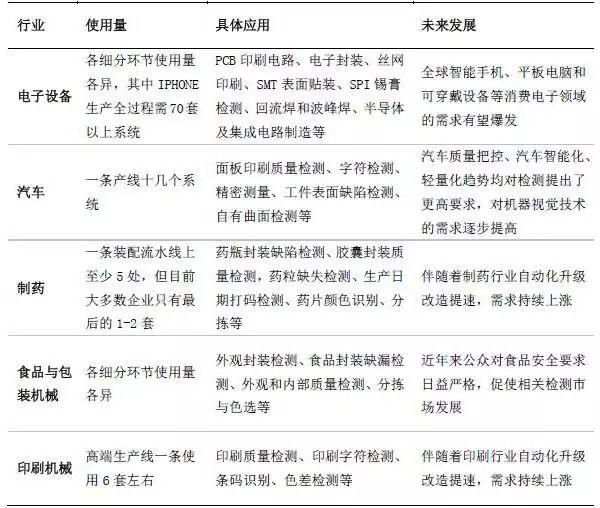
機(jī)器視覺(jué)工業(yè)應(yīng)用情況(來(lái)源:網(wǎng)絡(luò))
工業(yè)領(lǐng)域的機(jī)器視覺(jué)難點(diǎn)在于精度和速度,要求都在毫米級(jí),且工業(yè)領(lǐng)域工業(yè)機(jī)器人抓手的變動(dòng)是在三維空間內(nèi)。
基于機(jī)器視覺(jué)的工業(yè)機(jī)器人定位技術(shù)流程(來(lái)源:發(fā)那科)
機(jī)器視覺(jué)系統(tǒng)設(shè)計(jì)的五大難點(diǎn)
第一:打光的穩(wěn)定性
工業(yè)視覺(jué)應(yīng)用一般分成四大類(lèi):定位、測(cè)量、檢測(cè)和識(shí)別,其中測(cè)量對(duì)光照的穩(wěn)定性要求最高,因?yàn)楣庹罩灰l(fā)生10-20%的變化,測(cè)量結(jié)果將可能偏差出1-2個(gè)像素,這不是軟件的問(wèn)題,這是光照變化,導(dǎo)致了圖像上邊緣位置發(fā)生了變化,即使再厲害的軟件也解決不了問(wèn)題,必須從系統(tǒng)設(shè)計(jì)的角度,排除環(huán)境光的干擾,同時(shí)要保證主動(dòng)照明光源的發(fā)光穩(wěn)定性。當(dāng)然通過(guò)硬件相機(jī)分辨率的提升也是提高精度,抗環(huán)境干擾的一種辦法了。比如之前的相機(jī)對(duì)應(yīng)物空間尺寸是1個(gè)像素10um,而通過(guò)提升分辨率后變成 1個(gè)像素5um,精度近似可以認(rèn)為提升1倍,對(duì)環(huán)境的干擾自然增強(qiáng)了。
第二:工件位置的不一致性
一般做測(cè)量的項(xiàng)目,無(wú)論是離線(xiàn)檢測(cè),還是在線(xiàn)檢測(cè),只要是全自動(dòng)化的檢測(cè)設(shè)備,首先做的第一步工作都是要能找到待測(cè)目標(biāo)物。每次待測(cè)目標(biāo)物出現(xiàn)在拍攝視場(chǎng)中時(shí),要能精確知道待測(cè)目標(biāo)物在哪里,即使你使用一些機(jī)械夾具等,也不能特別高精度保證待測(cè)目標(biāo)物每次都出現(xiàn)在同一位置的,這就需要用到定位功能,如果定位不準(zhǔn)確,可能測(cè)量工具出現(xiàn)的位置就不準(zhǔn)確,測(cè)量結(jié)果有時(shí)會(huì)有較大偏差。
第三:標(biāo)定
一般在高精度測(cè)量時(shí)需要做以下幾個(gè)標(biāo)定,一光學(xué)畸變標(biāo)定(如果您不是用的軟件鏡頭,一般都必須標(biāo)定),二投影畸變的標(biāo)定,也就是因?yàn)槟惭b位置誤差代表的圖像畸變校正,三物像空間的標(biāo)定,也就是具體算出每個(gè)像素對(duì)應(yīng)物空間的尺寸。
不過(guò)目前的標(biāo)定算法都是基于平面的標(biāo)定,如果待測(cè)量的物理不是平面的,標(biāo)定就會(huì)需要作一些特種算法來(lái)處理,通常的標(biāo)定算法是解決不了的。
此外有些標(biāo)定,因?yàn)椴环矫媸褂脴?biāo)定板,也必須設(shè)計(jì)特殊的標(biāo)定方法,因此標(biāo)定不一定能通過(guò)軟件中已有的標(biāo)定算法全部解決。
第四:物體的運(yùn)動(dòng)速度
如果被測(cè)量的物體不是靜止的,而是在運(yùn)動(dòng)狀態(tài),那么一定要考慮運(yùn)動(dòng)模糊對(duì)圖像精度(模糊像素=物體運(yùn)動(dòng)速度*相機(jī)曝光時(shí)間),這也不是軟件能夠解決的。
第五:軟件的測(cè)量精度
在測(cè)量應(yīng)用中軟件的精度只能按照1/2—1/4個(gè)像素考慮,最好按照1/2,而不能向定位應(yīng)用一樣達(dá)到1/10-1/30個(gè)像素精度,因?yàn)闇y(cè)量應(yīng)用中軟件能夠從圖像上提取的特征點(diǎn)非常少。
機(jī)器視覺(jué)在非標(biāo)自動(dòng)化設(shè)備上優(yōu)勢(shì)、機(jī)器視覺(jué)在線(xiàn)檢測(cè)為自動(dòng)化提速!
機(jī)器視覺(jué)在非標(biāo)自動(dòng)化設(shè)備上優(yōu)勢(shì)具有哪些優(yōu)勢(shì)?
機(jī)器視覺(jué)在非標(biāo)自動(dòng)化設(shè)備上優(yōu)勢(shì)具有哪些優(yōu)勢(shì)?大家都知道自動(dòng)化設(shè)備就是不需要人的機(jī)器就能自動(dòng)工作的設(shè)備就叫自動(dòng)化設(shè)備,非標(biāo)自動(dòng)化設(shè)備就是根據(jù)用戶(hù)的實(shí)際需求定制的自動(dòng)化設(shè)備就叫非標(biāo)自動(dòng)化設(shè)備,下面圳玖科非標(biāo)自動(dòng)化就來(lái)詳細(xì)的為大家分析一下:
首先來(lái)普及下國(guó)家近期推得比較火的幾個(gè)熱門(mén)概念和政策,所謂智能制造和工業(yè)4.0概念,新聞媒體隔三差五的報(bào)道想必大家都聽(tīng)說(shuō)過(guò)這個(gè)概念,但不是業(yè)內(nèi)人士也基本只知道這幾個(gè)字,但對(duì)其行業(yè)和到底是干什么的可能還不了解,很榮幸我正式這個(gè)行業(yè)的從業(yè)者之一,就用我所在的角度給大家大致普及下吧。
今天我要說(shuō)的機(jī)器視覺(jué)檢測(cè)和自動(dòng)化設(shè)備正是智能制造2025其中一部分領(lǐng)域吧,其實(shí)國(guó)家的這個(gè)政策涉及面還是非常廣的,主要是提升國(guó)內(nèi)工業(yè)領(lǐng)域生產(chǎn)裝備的更新?lián)Q代,和全自動(dòng)生產(chǎn)加工,目前美國(guó)、德國(guó)、日本等國(guó)家在這方面做得非常好,很多領(lǐng)域都實(shí)現(xiàn)了無(wú)人化生產(chǎn)加工,上萬(wàn)平米的車(chē)間只需要十來(lái)個(gè)人,甚至很有意思的是一些動(dòng)物屠宰廠的全自動(dòng)化屠宰加工水平令人震驚,我們國(guó)家的裝備水平說(shuō)實(shí)話(huà)還有很長(zhǎng)路要走。
機(jī)器視覺(jué)檢測(cè)概念不是工業(yè)領(lǐng)域的人可能還不了解,但現(xiàn)在這項(xiàng)高級(jí)技術(shù)已經(jīng)在制造業(yè)領(lǐng)域應(yīng)用很廣泛了,機(jī)器視覺(jué)主要原理就是將利用工業(yè)相機(jī)拍攝圖像,使用專(zhuān)業(yè)的視覺(jué)檢測(cè)軟件和各種圖像算法對(duì)圖像進(jìn)行分析計(jì)算并給出所需的參數(shù),通過(guò)對(duì)這些參數(shù)的設(shè)置利用我們就可以到達(dá)很多目的實(shí)現(xiàn)很多功能.
比如:產(chǎn)品的高精度尺寸測(cè)量、零件坐標(biāo)位置、讀取一維二位碼數(shù)據(jù)、零件表面缺陷檢測(cè)識(shí)別、顏色識(shí)別、角度識(shí)別等功能,這項(xiàng)技術(shù)已經(jīng)能大程度上取代人眼了,而且檢測(cè)速度比人眼快5-10倍,目前這樣的技術(shù)已經(jīng)細(xì)分成很多專(zhuān)業(yè)領(lǐng)域了,比如3D掃描、刷臉識(shí)別、指紋識(shí)別、自動(dòng)駕駛等高科技領(lǐng)域,這項(xiàng)技術(shù)還在不斷更新完善功能會(huì)越來(lái)越強(qiáng)大。
非標(biāo)自動(dòng)化設(shè)備其實(shí)就是,根據(jù)客戶(hù)的生產(chǎn)步驟和生產(chǎn)效率要求,通過(guò)設(shè)計(jì)一套自動(dòng)機(jī)械機(jī)構(gòu),和電氣控制邏輯,將人的動(dòng)作取代并集成到一起,實(shí)現(xiàn)自動(dòng)上料、自動(dòng)組裝、自動(dòng)測(cè)試檢測(cè),并將這些數(shù)據(jù)保存下來(lái),可以追蹤產(chǎn)量效率、良率、能耗等。
機(jī)器視覺(jué)在線(xiàn)檢測(cè),為自動(dòng)化提速!
在線(xiàn)視覺(jué)檢測(cè)系統(tǒng)是當(dāng)今汽車(chē)行業(yè)自動(dòng)化率不斷提升過(guò)程中不可或缺的設(shè)備,它有力地保障了產(chǎn)品在尺寸控制、精確定位、功能匹配和自動(dòng)檢測(cè)方面的精度...
隨著汽車(chē)行業(yè)自動(dòng)化水平的不斷提高,一些傳統(tǒng)的檢測(cè)方式已不能適應(yīng)高節(jié)拍、柔性化的生產(chǎn)需求,自動(dòng)的具有實(shí)時(shí)監(jiān)控功能的機(jī)器視覺(jué)在線(xiàn)檢測(cè)技術(shù)逐漸在主流生產(chǎn)廠家得到應(yīng)用,并取得了良好的效果。
機(jī)器視覺(jué)系統(tǒng)由多組傳感器組成,每個(gè)傳感器首先要計(jì)算出被測(cè)物的特征點(diǎn),來(lái)進(jìn)行坐標(biāo)確定,然后將所有接收的數(shù)據(jù)信息擬合在統(tǒng)一的坐標(biāo)系統(tǒng)中,從而完成測(cè)量。機(jī)器視覺(jué)在線(xiàn)檢測(cè)技術(shù)從安裝方式上分為固定式和動(dòng)態(tài)式;從測(cè)量的方法上分為采用照相機(jī)拍照系統(tǒng)和激光系統(tǒng)兩種方式;從應(yīng)用領(lǐng)域上分為定位檢測(cè)功能、尺寸檢測(cè)、型面檢測(cè)和功能匹配等幾個(gè)方面。
在自動(dòng)化汽車(chē)生產(chǎn)線(xiàn)中,視覺(jué)系統(tǒng)必要時(shí)需要同機(jī)器人匹配應(yīng)用,并與生產(chǎn)線(xiàn)的PLC控制系統(tǒng)建立聯(lián)接,以實(shí)現(xiàn)測(cè)量、檢測(cè)、定位和識(shí)別的功能。視覺(jué)檢測(cè)系統(tǒng)具有如下特點(diǎn):采用非接觸式測(cè)量方式,提高了相應(yīng)速度,對(duì)生產(chǎn)線(xiàn)影響小;具有長(zhǎng)時(shí)間的穩(wěn)定、可靠地重復(fù)工作的性能,適用于汽車(chē)連續(xù)化的流水線(xiàn)作業(yè);適合在安全風(fēng)險(xiǎn)高、人機(jī)工程惡劣和環(huán)境差的區(qū)域工作。諸多優(yōu)點(diǎn)使視覺(jué)檢測(cè)系統(tǒng)在汽車(chē)行業(yè)中得到了廣泛的應(yīng)用。
在線(xiàn)尺寸檢測(cè)功能
(1)車(chē)身尺寸檢測(cè)功能(通常采用動(dòng)態(tài)檢測(cè)方式)
在生產(chǎn)線(xiàn)的特定位置,設(shè)置激光測(cè)量系統(tǒng),對(duì)車(chē)身的關(guān)鍵控制點(diǎn)進(jìn)行測(cè)量,并將數(shù)據(jù)實(shí)時(shí)傳輸?shù)綌?shù)據(jù)分析系統(tǒng),并能將發(fā)現(xiàn)的問(wèn)題及時(shí)進(jìn)行報(bào)警。
該方式實(shí)現(xiàn)了實(shí)時(shí)數(shù)據(jù)記錄、分析,能夠有效控制問(wèn)題的發(fā)生范圍;采用相對(duì)傳統(tǒng)的CMM測(cè)量,測(cè)量樣本量大,能在短期內(nèi)有足夠的樣本進(jìn)行統(tǒng)計(jì)學(xué)分析;靈活性好,通過(guò)計(jì)算機(jī)編程,可以對(duì)車(chē)身需要關(guān)注的局部(如車(chē)輛改型、新零件試制)進(jìn)行定點(diǎn)檢測(cè),對(duì)問(wèn)題做出準(zhǔn)確判斷;柔性好,對(duì)多車(chē)型混線(xiàn)生產(chǎn)有良好的兼容性;自動(dòng)工作,節(jié)省人力成本。
缺點(diǎn)是設(shè)備初期一次性費(fèi)用投入較大;測(cè)量精度比CMM低;對(duì)工位的定位精度要求相對(duì)較高。
(2)測(cè)量系統(tǒng)
圖1 視覺(jué)在線(xiàn)自動(dòng)檢測(cè)
測(cè)量系統(tǒng)如圖1所示,測(cè)量單元主要包括:工裝定位系統(tǒng)、機(jī)器人+激光測(cè)頭=測(cè)量系統(tǒng)、系統(tǒng)自檢系統(tǒng)(含溫度補(bǔ)償)、控制系統(tǒng)、車(chē)型識(shí)別系統(tǒng)(柔性化生產(chǎn)線(xiàn))、數(shù)據(jù)分析系統(tǒng)。
視覺(jué)測(cè)量系統(tǒng)工作原理見(jiàn)圖2:使用平面激光照射被測(cè)物體表面,采集二維平面數(shù)據(jù);使用激光線(xiàn)照射被測(cè)物體采集第三維數(shù)據(jù);根據(jù)采集數(shù)據(jù)通過(guò)專(zhuān)業(yè)軟件進(jìn)行分析;通過(guò)相關(guān)算法得出被測(cè)物體或特征的位移、形變以及其他幾何特征的變化。
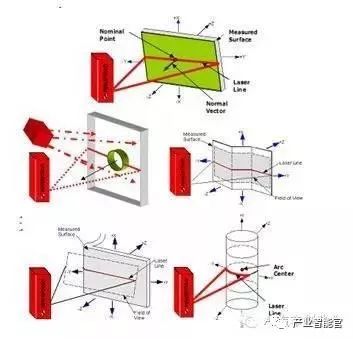
圖2 視覺(jué)測(cè)量系統(tǒng)工作原理
如圖3所示,該案例存在的問(wèn)題是某車(chē)型大燈支架批次性波動(dòng),調(diào)查發(fā)現(xiàn)該車(chē)型前縱梁尺寸發(fā)生變化,供應(yīng)商新線(xiàn)生產(chǎn)的前縱梁尺寸不符合要求,前縱梁為兩條線(xiàn)進(jìn)行生產(chǎn)。根據(jù)零件對(duì)比檢測(cè),最終確定供應(yīng)商參照第一條生產(chǎn)線(xiàn)的狀態(tài)對(duì)零件進(jìn)行整改,使之尺寸狀態(tài)一致,修復(fù)后批次性波動(dòng)消除。
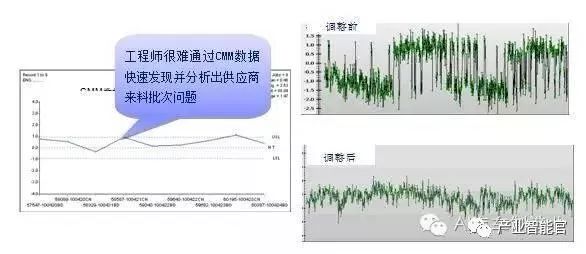
圖3 案例分析
四門(mén)兩蓋、翼子板間隙和平整度匹配在線(xiàn)測(cè)量
固定式:
(1)設(shè)備要求:自動(dòng)識(shí)別車(chē)型,完成激光測(cè)量并即時(shí)顯示測(cè)量結(jié)果。
(2)測(cè)量?jī)?nèi)容:三車(chē)型外覆蓋件的匹配(平整度和間隙),主要包括:前蓋與翼子板匹配;翼子板與前門(mén)匹配;前后門(mén)匹配(包括窗框);后門(mén)與后翼子板匹配;后蓋(或后舉門(mén))與后翼子板匹配。
(3)工作原理流程如圖4所示。
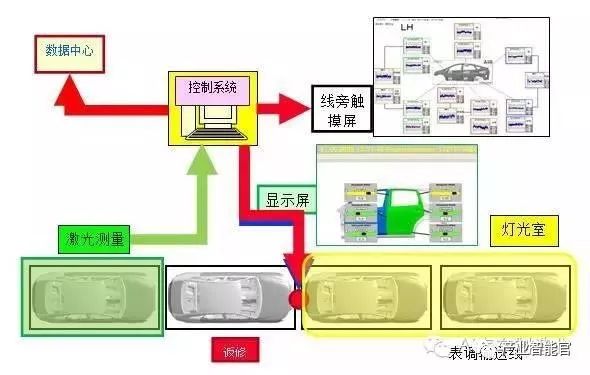
圖4 間隙和平整度檢測(cè)流程
(4)優(yōu)點(diǎn):設(shè)備為固定式,操作、保養(yǎng)相對(duì)簡(jiǎn)單;能將一個(gè)時(shí)間段的車(chē)輛的不同部位的間隙、平整度等進(jìn)行綜合分析,為改進(jìn)提供方向;對(duì)在線(xiàn)車(chē)輛的匹配100%的測(cè)量,確保了車(chē)輛匹配的一致性;消除了人工測(cè)量時(shí)的測(cè)量誤差,長(zhǎng)久來(lái)看降低了人工成本;即時(shí)發(fā)現(xiàn)問(wèn)題,有利于后道工藝進(jìn)行返修;適用于大批量、連續(xù)化生產(chǎn)的質(zhì)量控制。
機(jī)器人裝配精確定位
在現(xiàn)場(chǎng)自動(dòng)化工位,如頂蓋安裝、機(jī)器人激光焊接、門(mén)蓋的安裝以及自動(dòng)涂膠等工藝,都需要先進(jìn)行精確定位,機(jī)器人對(duì)定位數(shù)據(jù)進(jìn)行分析后進(jìn)行正確的操作,以達(dá)到工藝的穩(wěn)定性。此種定位采取激光測(cè)量的方式,通常采用固定方式。
在此以機(jī)器人前蓋定位安裝為例(見(jiàn)圖5):車(chē)輛到達(dá)工位定位,線(xiàn)旁設(shè)置了6組固定式激光測(cè)量裝置,前部4組測(cè)量頭分別對(duì)前蓋的兩側(cè)前后的間隙和平整度進(jìn)行測(cè)量,另外兩組測(cè)量頭對(duì)前蓋的鉸鏈安裝孔的位置進(jìn)行測(cè)量定位,機(jī)器人用抓手抓起前蓋,通過(guò)收到的數(shù)據(jù)信息不斷修正左右間隙和平整度的一致性,并對(duì)前蓋的定位孔進(jìn)行修正,然后打緊鉸鏈。
圖5 機(jī)器人前蓋定位安裝
在線(xiàn)門(mén)蓋型面檢測(cè)
在線(xiàn)門(mén)蓋型面檢測(cè)如圖6所示,通常采用照相系統(tǒng)或激光面掃描等對(duì)外覆蓋件的輪廓或特征進(jìn)行在線(xiàn)檢測(cè),減少了人工搬運(yùn)、下線(xiàn)的問(wèn)題,實(shí)現(xiàn)100%在線(xiàn)檢測(cè),面掃描也是觸發(fā)式測(cè)量設(shè)備無(wú)法完全替代的檢測(cè)方法。
圖6 在線(xiàn)門(mén)蓋型面檢測(cè)
此外,在線(xiàn)檢測(cè)設(shè)備還可以對(duì)機(jī)器人涂膠的軌跡和位置等進(jìn)行測(cè)量監(jiān)控,并對(duì)軌跡的偏差設(shè)定報(bào)警限,從而實(shí)現(xiàn)自動(dòng)監(jiān)控。
結(jié)語(yǔ)
機(jī)器視覺(jué)在線(xiàn)檢測(cè)系統(tǒng)是當(dāng)今汽車(chē)行業(yè)自動(dòng)化率不斷提升過(guò)程中不可或缺的設(shè)備,本文介紹的幾種使用方法是在實(shí)踐中較為成熟的,它有力地保障了產(chǎn)品在尺寸控制、精確定位、功能匹配和自動(dòng)檢測(cè)方面的精度,未來(lái)必將在更廣闊的領(lǐng)域中得到應(yīng)用,為實(shí)現(xiàn)更高自動(dòng)化、更精細(xì)的質(zhì)量等方面發(fā)揮巨大的作用。
機(jī)器視覺(jué)應(yīng)用介紹(機(jī)器人篇)
為什么機(jī)器人需要視覺(jué)系統(tǒng)?
1沒(méi)有視覺(jué)的機(jī)器人應(yīng)用有局限性
位置必須固定
機(jī)器人輔助生產(chǎn)的生產(chǎn)線(xiàn)上,機(jī)器人的運(yùn)動(dòng)位置是根據(jù)生產(chǎn)產(chǎn)品的特征預(yù)先設(shè)定好的,即按照預(yù)先設(shè)定的運(yùn)動(dòng)軌跡來(lái)執(zhí)行動(dòng)作。因此,需要有一定的治具保證產(chǎn)品的位置的固定。如果產(chǎn)品規(guī)格多樣,則需要大量的專(zhuān)用治具來(lái)實(shí)現(xiàn)產(chǎn)品位置的固定。其成本高昂、更換夾具的工作量巨大。
精度與可靠性的矛盾
機(jī)器人裝配的精度要求越高,需要的治具的精度也越高。治具的精度越高,機(jī)器人本體的精度越難以可以每次都準(zhǔn)確、可靠的裝配。
接觸式定位的弊端
某些產(chǎn)品因?yàn)楸砻婕?xì)膩,不能夠通過(guò)機(jī)械夾具來(lái)加持,以免破壞表面。有些產(chǎn)品因?yàn)槭侨嵝圆馁|(zhì),也無(wú)法實(shí)現(xiàn)可靠的抓取。
2視覺(jué)系統(tǒng)對(duì)機(jī)器人應(yīng)用的幫助
位置修調(diào)
使用視覺(jué)系統(tǒng)告知機(jī)器人產(chǎn)品的位置,提供抓取的定位信息,更換產(chǎn)品也只需要更換產(chǎn)品的檢測(cè)文件即可。節(jié)省大量的機(jī)械成本及更換治具需要的時(shí)間。
多次定位保證精確性
可以用低精度的治具或者粗定位的視覺(jué)系統(tǒng)實(shí)現(xiàn)機(jī)器人完成抓取產(chǎn)品的工作。抓取后再通過(guò)視覺(jué)系統(tǒng)精確的捕捉物體的特征,實(shí)現(xiàn)高精度的定位,使機(jī)器人在抓取后能夠進(jìn)一步修正位置,實(shí)現(xiàn)精密裝配。
非接觸式測(cè)量
視覺(jué)系統(tǒng)采用的是光學(xué)測(cè)量的方法,不會(huì)破壞物體的表面也不會(huì)因?yàn)槲矬w是柔性的而無(wú)法測(cè)量。
3單獨(dú)視覺(jué)系統(tǒng)在生產(chǎn)中的局限性
無(wú)法全面的觀測(cè)
從成像的原理來(lái)說(shuō),一臺(tái)相機(jī)只能捕獲一個(gè)平面的圖像信息。對(duì)于復(fù)雜的物體,需要檢測(cè)多個(gè)面的情況下,往往需要很多相機(jī)協(xié)同工作。如果產(chǎn)品的規(guī)格很多,不同的規(guī)格相機(jī)需要調(diào)整到不同的位置來(lái)檢測(cè)。使得整個(gè)檢測(cè)系統(tǒng)異常的復(fù)雜。
精度與視野的矛盾
受制于相機(jī)感光芯片的分辨率的限制,越是大的視野,分辨的精度越低。在這種情況下,對(duì)于大的物體,無(wú)法實(shí)現(xiàn)高精度的檢測(cè)。
4機(jī)器人對(duì)視覺(jué)系統(tǒng)應(yīng)用的幫助
多姿態(tài)的可能性
通過(guò)把視覺(jué)系統(tǒng)安裝在機(jī)器人的關(guān)節(jié)上,可以使用機(jī)器人來(lái)調(diào)整相機(jī)或者光源的位置,來(lái)實(shí)現(xiàn)各種不同姿態(tài)的檢測(cè)需求,從而實(shí)現(xiàn)對(duì)多規(guī)格、復(fù)雜產(chǎn)品的檢測(cè)應(yīng)用。
隨動(dòng)檢測(cè)
可以通過(guò)使用機(jī)器人帶著相機(jī)遍歷大檢測(cè)對(duì)象的各個(gè)檢測(cè)部位或者跟隨機(jī)器人的運(yùn)動(dòng)軌跡實(shí)時(shí)的檢測(cè),從而實(shí)現(xiàn)對(duì)大物體進(jìn)行小視野高精度的檢測(cè)。
未來(lái)已來(lái)——解讀人工智能和深度學(xué)習(xí)對(duì)機(jī)器視覺(jué)的影響
摘要
通過(guò)采用深度學(xué)習(xí)技術(shù)和人類(lèi)用于發(fā)展大腦的其他功能,在機(jī)器視覺(jué)中融入人工智能將使機(jī)器思考得更像人類(lèi)。
當(dāng)20世紀(jì)50年代出現(xiàn)了“思維機(jī)器”的概念之后不久,人們就開(kāi)始對(duì)人工智能(AI)領(lǐng)域發(fā)出了不安的警告。自從1968年的標(biāo)志性電影“2001:太空漫游”到2014年的科幻大片“機(jī)械姬 Ex Machina”,對(duì)“機(jī)器崛起”的恐懼一直在流行文化中發(fā)酵著。
雖然AI仍然沒(méi)有像人們擔(dān)心的那樣“接管”社會(huì),但是隨著數(shù)據(jù)存儲(chǔ)和處理能力的提高,像IBM Watson這樣的認(rèn)知系統(tǒng)的開(kāi)發(fā)使得未來(lái)代替人類(lèi)決策的猜測(cè)成為可能。不過(guò)目前而言,大多數(shù)AI的迭代處理還是諸如對(duì)象識(shí)別等更為“溫和”的任務(wù)。
AI技術(shù)的運(yùn)用,將使機(jī)器視覺(jué)能夠具有超越現(xiàn)有解決方案的能力,勝任更具有挑戰(zhàn)性的應(yīng)用。但是加入AI的機(jī)器視覺(jué)是否已經(jīng)做好準(zhǔn)備用于工業(yè)應(yīng)用呢?
深度學(xué)習(xí)能力
AI在機(jī)器視覺(jué)中的適用性依賴(lài)于機(jī)器學(xué)習(xí)技術(shù),更準(zhǔn)確的說(shuō)是深度學(xué)習(xí)能力。從最廣泛的層面上來(lái)說(shuō),AI可以被定義為計(jì)算機(jī)模擬人類(lèi)智能的能力。機(jī)器學(xué)習(xí)使計(jì)算機(jī)能夠在沒(méi)有明確編程的情況下進(jìn)行操作。深度學(xué)習(xí),是機(jī)器學(xué)習(xí)的一個(gè)子領(lǐng)域,使計(jì)算機(jī)能夠從經(jīng)驗(yàn)中不斷學(xué)習(xí)。
過(guò)去十年的一些發(fā)展使得在機(jī)器視覺(jué)中應(yīng)用深度學(xué)習(xí)技術(shù)成為現(xiàn)實(shí)。“基于神經(jīng)網(wǎng)絡(luò)的新技術(shù),圖形處理單元(GPU)足夠強(qiáng)大的計(jì)算能力以及豐富的數(shù)據(jù),現(xiàn)在我們已經(jīng)可以使用人工智能進(jìn)行圖像處理。”來(lái)自ViDi Systems業(yè)務(wù)發(fā)展部門(mén)的Olivier Despont談道。該公司2017年4月已被康耐視公司收購(gòu),其主要產(chǎn)品是基于深度學(xué)習(xí)的工業(yè)圖像分析軟件。
深度學(xué)習(xí)為傳統(tǒng)的機(jī)器視覺(jué)技術(shù)帶來(lái)了希望,因?yàn)樗c使用基于規(guī)則方法的傳統(tǒng)圖像處理軟件不同。“AI使我們?cè)谟龅讲蝗菀妆碚骰蚍蔷€(xiàn)性的應(yīng)用時(shí),賦予機(jī)器更高水平的可重復(fù)性。”FISBA LLC定制光學(xué)系統(tǒng)銷(xiāo)售總監(jiān)Wallace Latimer說(shuō):“如果把線(xiàn)性算法比喻成創(chuàng)建一個(gè)非常窄的桶,那么AI 或深度學(xué)習(xí)就是創(chuàng)造更大的桶,可以接受更多的變化。通過(guò)更寬泛的接受度,您可以專(zhuān)注于最重要的事,減少投入的變化。”
目前,機(jī)器視覺(jué)用戶(hù)已經(jīng)可以在市場(chǎng)上找到深度學(xué)習(xí)系統(tǒng)軟件。例如,第一款深度學(xué)習(xí)工業(yè)圖像分析軟件ViDi Suite已經(jīng)投入商業(yè)運(yùn)營(yíng)。通過(guò)與標(biāo)準(zhǔn)圖像處理庫(kù)集成的軟件,它可以像小孩子一樣進(jìn)行學(xué)習(xí)。
“你不會(huì)用一個(gè)基于規(guī)則的方式跟孩子解釋房子是什么。” Despont說(shuō),“通過(guò)很少的例子,即使在年幼的時(shí)候,我們的大腦也能夠認(rèn)知到房子是什么。在這方面,我們的深度學(xué)習(xí)系統(tǒng)與人類(lèi)大腦運(yùn)作相似。”
相較于傳統(tǒng)機(jī)器視覺(jué)解決方案,深度學(xué)習(xí)的另一個(gè)優(yōu)點(diǎn)是可以減少開(kāi)發(fā)機(jī)器視覺(jué)程序所需的時(shí)間。“通常來(lái)說(shuō),大多數(shù)機(jī)器視覺(jué)應(yīng)用程序需要60多天的軟件開(kāi)發(fā)和可行性測(cè)試,而采用ViDi Suite半天就可以完成開(kāi)發(fā)。” Despont說(shuō)。
與建構(gòu)在“服務(wù)器群組”基礎(chǔ)上的AI系統(tǒng)不同(例如由Facebook、Google和IBM開(kāi)發(fā)的軟件),ViDi使用單個(gè)高端NVIDIA GPU在幾分鐘內(nèi)就可對(duì)系統(tǒng)進(jìn)行訓(xùn)練。根據(jù)Despont的說(shuō)法,這會(huì)節(jié)省大量時(shí)間,例如使用IBM Watson來(lái)編程和參數(shù)化可能需要幾天甚至幾個(gè)月的時(shí)間。
“我們建議從30到50個(gè)代表性的優(yōu)質(zhì)圖像開(kāi)始教授系統(tǒng),而不是使用數(shù)百萬(wàn)或數(shù)十億個(gè)圖像。”Despont說(shuō),“我們不會(huì)將圖像發(fā)送到基于云的服務(wù)器農(nóng)場(chǎng)進(jìn)行處理或培訓(xùn)。客戶(hù)很高興,他們可以使用一個(gè)GPU在一臺(tái)PC上運(yùn)行所有內(nèi)容,并保持其圖像的所有權(quán)。”
機(jī)遇與挑戰(zhàn)
深度學(xué)習(xí)為一些采用傳統(tǒng)視覺(jué)系統(tǒng)面臨挑戰(zhàn)的應(yīng)用帶來(lái)了希望。Teledyne Dalsa公司的軟件項(xiàng)目經(jīng)理Bruno Ménard說(shuō):“AI真的很適合于食物檢查,尤其是當(dāng)您想要檢查甜甜圈或一塊顯示出明顯差異的肉時(shí)”。
不僅僅是有機(jī)檢測(cè)應(yīng)用能從AI中獲益,Ménard還引用了傳統(tǒng)的缺陷檢測(cè)應(yīng)用作為另一個(gè)例子。“使用傳統(tǒng)算法來(lái)編程計(jì)算機(jī)難以定義缺陷,需要在每次出現(xiàn)新的缺陷時(shí)重做設(shè)置。” 他說(shuō),“但是通過(guò)擁有大量樣品的人工智能,您最終可以得到一個(gè)非常清晰的了解,知道哪些部分是好的,哪些是不好的。”
隨著AI在機(jī)器視覺(jué)方面的興起,該技術(shù)將適用于更多的檢查任務(wù),最終超越工業(yè)自動(dòng)化領(lǐng)域。Latimer認(rèn)為,深度學(xué)習(xí)在醫(yī)療、生命科學(xué)、食品、假冒檢驗(yàn)和木材分級(jí)等行業(yè)都將有很好的發(fā)展前景。
“在這些應(yīng)用中都有很多不太容易做出判斷的決定點(diǎn)。” Latimer說(shuō),“例如,那個(gè)蘋(píng)果還好嗎?就很難說(shuō)出一個(gè)線(xiàn)性的規(guī)則去判斷。而通過(guò)深度學(xué)習(xí)應(yīng)該可以使許多應(yīng)用變得更加高效和可重復(fù)。”
未來(lái),在醫(yī)療診斷、監(jiān)視、自動(dòng)駕駛和智慧農(nóng)業(yè)等領(lǐng)域?qū)?huì)更多地引入深度學(xué)習(xí)技術(shù),以實(shí)現(xiàn)檢查或地圖分析等功能。Despont說(shuō):“AI是未來(lái)的發(fā)展趨勢(shì),很快就能幫助人們解決一些復(fù)雜的任務(wù),因?yàn)橛?jì)算能力幾乎每一年半都翻倍。”
許多機(jī)器視覺(jué)專(zhuān)業(yè)人士已經(jīng)認(rèn)識(shí)到AI和深度學(xué)習(xí)將對(duì)視覺(jué)行業(yè)帶來(lái)重要的影響,但他們認(rèn)為AI的全部潛力可能至少要在3到5年之后才會(huì)爆發(fā)。此外,AI也并不是解決所有傳統(tǒng)機(jī)器視覺(jué)和圖像處理問(wèn)題的唯一方法。
Ménard指出了AI系統(tǒng)的兩個(gè)主要缺點(diǎn)。“首先,你需要大量的培訓(xùn),你需要?jiǎng)?chuàng)建專(zhuān)家團(tuán)隊(duì),以便于達(dá)到下一個(gè)級(jí)別的分類(lèi)。”他說(shuō),“第二個(gè)缺點(diǎn)是一旦被訓(xùn)練完,發(fā)現(xiàn)分類(lèi)失敗,就很難解決這個(gè)問(wèn)題。你別無(wú)選擇,只有再培訓(xùn)一個(gè)新的樣本。”
人工智能在機(jī)器視覺(jué)中變得越來(lái)越普遍,行業(yè)專(zhuān)家建議應(yīng)該根據(jù)企業(yè)自身的情況有側(cè)重的發(fā)展。“從利基市場(chǎng)來(lái)看,世界各地的谷歌正在將這項(xiàng)技術(shù)推向難以置信的投資和細(xì)化水平。” Latimer說(shuō),“在工業(yè)領(lǐng)域,我們可能無(wú)法投入如此大規(guī)模的時(shí)間和資本,因此我們要善于利用它的優(yōu)勢(shì)。”
本文來(lái)自于《控制工程中文版》(CONTROL ENGINEERING China )2017年8月刊《機(jī)器視覺(jué)專(zhuān)刊》欄目,原標(biāo)題為:人工智能對(duì)機(jī)器視覺(jué)的影響。
關(guān)于機(jī)器視覺(jué)技術(shù)的未來(lái)趨勢(shì)
機(jī)器視覺(jué)在工廠自動(dòng)化中起著至關(guān)重要的作用,而且其正向更多領(lǐng)域快速發(fā)展。雖然機(jī)器視覺(jué)曾經(jīng)被認(rèn)為僅僅是人類(lèi)視覺(jué)的替代品,但今天,它早已成為提升質(zhì)量和生產(chǎn)效率的驅(qū)動(dòng)力,具有能夠?qū)⒍嗑S的、甚至肉眼不可見(jiàn)的微米級(jí)信息捕獲到的強(qiáng)大能力。
行業(yè)專(zhuān)家預(yù)測(cè)未來(lái)5 年, 機(jī)器視覺(jué)的復(fù)合年增長(zhǎng)率將突破8%, 到2022 年,全球機(jī)器視覺(jué)市場(chǎng)規(guī)模預(yù)計(jì)或?qū)⒊^(guò)140 億美元。那么,關(guān)于機(jī)器視覺(jué)技術(shù),有哪些新的發(fā)展趨勢(shì)值得我們關(guān)注的呢?
工業(yè)物聯(lián)網(wǎng)(IIoT)
隨著IIoT 的發(fā)展,機(jī)器視覺(jué)應(yīng)該會(huì)大幅提升。 IIoT 將信息技術(shù)與運(yùn)營(yíng)技術(shù)連接起來(lái),因此它需要通過(guò)廣泛的數(shù)據(jù)采集和分析,以不斷優(yōu)化工廠的運(yùn)行。機(jī)器視覺(jué)是為IIoT 提供信息的最重要的基礎(chǔ)技術(shù)之一。全球制造業(yè)在IIoT 方面的快速發(fā)展,導(dǎo)致了機(jī)器人技術(shù)的復(fù)興和對(duì)機(jī)器視覺(jué)產(chǎn)品的新需求。
IIoT 加速了人類(lèi)和機(jī)器人如何協(xié)同合作的進(jìn)程,但是如果沒(méi)有機(jī)器視覺(jué)技術(shù)將大量的設(shè)備、機(jī)器人和人連接在一起,這些都不會(huì)發(fā)生。
更易使用
機(jī)器視覺(jué)系統(tǒng)的操作員更偏好用戶(hù)友好的界面和更直觀反映工廠車(chē)間環(huán)境的產(chǎn)品。但與此同時(shí),視覺(jué)感知輸入?yún)s比以往任何時(shí)候都更加復(fù)雜,這對(duì)于設(shè)備和軟件設(shè)計(jì)人員簡(jiǎn)化他們的界面來(lái)說(shuō)是一個(gè)巨大的挑戰(zhàn)。
產(chǎn)品的標(biāo)準(zhǔn)化將幫助用戶(hù)集成和運(yùn)行視覺(jué)系統(tǒng),同時(shí)降低設(shè)備的可替換性成本。 此外,在設(shè)置應(yīng)用程序、定位和檢查零件,以及通過(guò)與HMI、PLC和機(jī)器人設(shè)備的通信來(lái)配置結(jié)果等方面,軟件設(shè)計(jì)人員將進(jìn)一步簡(jiǎn)化流程,通過(guò)更簡(jiǎn)潔的界面提升效率。
CoaXPress 標(biāo)準(zhǔn)
CoaXPress 是一種非對(duì)稱(chēng)的高速點(diǎn)對(duì)點(diǎn)串行通信數(shù)字接口標(biāo)準(zhǔn),可通過(guò)相機(jī)到相機(jī)之間的同軸電纜實(shí)現(xiàn)傳輸和接收數(shù)據(jù)。新一代 CXP 單鏈路相機(jī)不但價(jià)格更低,還具有更小的體積、更低的功耗和產(chǎn)生更少的熱量,進(jìn)一步降低了集成商設(shè)計(jì)基于 CXP 接口系統(tǒng)的難度。
CoaXPress 可以高達(dá) 6.25G 比特 / 秒的速度傳輸數(shù)據(jù),這幾乎是 USB 3 Vision標(biāo)準(zhǔn)在現(xiàn)實(shí)環(huán)境中能達(dá)到的數(shù)據(jù)速率的2 倍,甚至比最新的 GigE Vision 的數(shù)據(jù)傳輸速率還快。 CoaXPress 標(biāo)準(zhǔn)可以為今后十年間不斷增長(zhǎng)的帶寬需求提供支持,同時(shí)還可以滿(mǎn)足許多額外要求,如:更高的可靠性、靈活性、實(shí)時(shí)性以及成本效益等。
擴(kuò)展到更多領(lǐng)域
更低的成本和持續(xù)改進(jìn)的視覺(jué)組件,如 3D 彩色攝像機(jī)和機(jī)器學(xué)習(xí)技術(shù),將進(jìn)一步推動(dòng)機(jī)器視覺(jué)擴(kuò)展到非工業(yè)領(lǐng)域的應(yīng)用中,如“無(wú)人駕駛”汽車(chē)系統(tǒng)、 IP 視頻監(jiān)控、智能交通系統(tǒng)、智慧農(nóng)業(yè)和醫(yī)療等。
曾經(jīng)被認(rèn)為是脆弱的、不能在任何地方使用,只能在環(huán)境控制很好的室內(nèi)區(qū)域使用的機(jī)器視覺(jué)產(chǎn)品,現(xiàn)在已經(jīng)足夠堅(jiān)固,以至于可以適用于戶(hù)外的苛刻環(huán)境。
本文來(lái)自于《控制工程中文版》(CONTROL ENGINEERING China )2017年8月刊,原標(biāo)題為:關(guān)于機(jī)器視覺(jué)技術(shù)的未來(lái)趨勢(shì)
機(jī)器視覺(jué)的下一個(gè)想象空間是嵌入式?
歷經(jīng)多年積累,機(jī)器視覺(jué)技術(shù)或許正在面臨一個(gè)黃金發(fā)展期。一旦成本下降、性能提升、應(yīng)用增多,就如無(wú)線(xiàn)網(wǎng)絡(luò)普及帶來(lái)的變革一樣,機(jī)器視覺(jué)的軟硬件產(chǎn)品將成為生產(chǎn)制造業(yè)的標(biāo)配。
美國(guó)市場(chǎng)研究咨詢(xún)機(jī)構(gòu)Transparency Market Research發(fā)布的報(bào)告顯示,全球機(jī)器視覺(jué)技術(shù)市場(chǎng)有望從2014年的157億美元(約人民幣1040億元),以8.40%的復(fù)合年均增長(zhǎng)率上升到2021年的285億美元(約人民幣1890億元)。
機(jī)器視覺(jué)系統(tǒng)對(duì)于實(shí)現(xiàn)工廠自動(dòng)化來(lái)說(shuō)不可或缺的,裝配定位、質(zhì)量檢測(cè)、產(chǎn)品識(shí)別、尺寸測(cè)量……高速生產(chǎn)線(xiàn)上的高精度要求,人眼已無(wú)法滿(mǎn)足。
怎樣讓成本降下來(lái)?可以想象的空間很多,嵌入式機(jī)器視覺(jué)系統(tǒng)會(huì)是個(gè)不錯(cuò)的選擇,而系統(tǒng)的核心當(dāng)然離不開(kāi)微處理器。從20世紀(jì)90年代,微處理器、半導(dǎo)體技術(shù)與機(jī)器視覺(jué)技術(shù)相伴螺旋上升:微處理器、半導(dǎo)體技術(shù)是機(jī)器視覺(jué)的發(fā)源地,歐美在其中大量應(yīng)用圖像技術(shù),后來(lái)慢慢演化成今天的機(jī)器視覺(jué)技術(shù)。機(jī)器視覺(jué)在歐美的應(yīng)用普及,同樣主要體現(xiàn)在半導(dǎo)體及電子行業(yè)。現(xiàn)在,微處理器性能變得更強(qiáng)勁、功耗大大降低、尺寸越加緊湊,價(jià)錢(qián)卻沒(méi)有變高。
以今年2月上市的樹(shù)莓派3代微處理器(Raspberry Pi 3)為例,配備 64 位 1.2GHz 四核芯片及 1GB 內(nèi)存,性能相對(duì)樹(shù)莓派2 (Raspberry Pi 2)提升了 50%。而價(jià)格仍然只要 35 美元(約人民幣232元),與四年前首發(fā)時(shí)的樹(shù)莓派1代B型(Raspberry Pi Model B)定價(jià)相同。把高性能、低功耗、緊湊型的微處理器大批量地應(yīng)用于嵌入式視覺(jué)系統(tǒng),單個(gè)成本有望再降一半。
在通用計(jì)算機(jī)上集成機(jī)器視覺(jué)系統(tǒng)時(shí),涉及到照明、成像、圖像數(shù)字化、圖像處理算法、軟硬件等多門(mén)技術(shù),對(duì)技術(shù)人員提出了極高的要求。使用嵌入式機(jī)器視覺(jué)系統(tǒng),軟硬件配置變得靈活,開(kāi)發(fā)環(huán)境與程序更加通用。易于量產(chǎn)和擴(kuò)線(xiàn),令生產(chǎn)柔性得到極大提升,企業(yè)對(duì)機(jī)器視覺(jué)技術(shù)的普遍需求將得到快速響應(yīng)。
機(jī)器視覺(jué)相關(guān)全球標(biāo)準(zhǔn)的陸續(xù)出臺(tái),加速了嵌入式系統(tǒng)的進(jìn)程。去年6月,中國(guó)機(jī)器視覺(jué)產(chǎn)業(yè)聯(lián)盟(CMVU)加入G3標(biāo)準(zhǔn), 這是CMVU成為第15位G3標(biāo)準(zhǔn)的成員單位。其他成員包括:美國(guó)自動(dòng)化成像協(xié)會(huì)(AIA)、歐洲機(jī)器視覺(jué)協(xié)會(huì)(EMVA)、日本工業(yè)成像協(xié)會(huì)(JIIA)、德國(guó)機(jī)械設(shè)備制造業(yè)聯(lián)合會(huì)(VDMA)等。“全球機(jī)器視覺(jué)接口標(biāo)準(zhǔn)”手冊(cè)的發(fā)行、“G3相機(jī)標(biāo)準(zhǔn)”協(xié)議的簽訂,都將縮短開(kāi)發(fā)時(shí)間,減少投資成本,同時(shí)加快產(chǎn)品的上市速度。
此外,為了使機(jī)器視覺(jué)能夠適應(yīng)“工業(yè)4.0”以及未來(lái)的工廠生產(chǎn),德國(guó)機(jī)械設(shè)備制造業(yè)聯(lián)合會(huì)機(jī)器視覺(jué)專(zhuān)業(yè)協(xié)會(huì)(VDMA Machine Vision)與OPC基金會(huì)(OPC Foundation)開(kāi)始編制《OPC統(tǒng)一架構(gòu)機(jī)器視覺(jué)配套規(guī)范》,旨在將機(jī)器視覺(jué)系統(tǒng)直接整合進(jìn)生產(chǎn)控制與IT系統(tǒng),發(fā)揮最大的效能。
工業(yè)4.0是關(guān)于連接生產(chǎn)技術(shù)和信息技術(shù)的,而機(jī)器視覺(jué)是為工業(yè)4.0提供信息的最重要的基礎(chǔ)技術(shù)之一。嵌入系統(tǒng)會(huì)在未來(lái)的機(jī)器視覺(jué)系統(tǒng)中扮演更重要的角色。它們可以實(shí)現(xiàn)緊湊型產(chǎn)品的設(shè)計(jì),滿(mǎn)足大多數(shù)圖像處理的要求,并且與基于PC的獨(dú)立系統(tǒng)相比,其與工廠流程的集成度更高。
-
機(jī)器視覺(jué)
+關(guān)注
關(guān)注
163文章
4508瀏覽量
122190 -
工業(yè)互聯(lián)網(wǎng)
+關(guān)注
關(guān)注
28文章
4354瀏覽量
94811
原文標(biāo)題:工業(yè)互聯(lián)網(wǎng)正確打開(kāi)方式系列(十):機(jī)器視覺(jué)
文章出處:【微信號(hào):GeWu-IOT,微信公眾號(hào):物聯(lián)網(wǎng)資本論】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
四年造芯,他顛覆傳統(tǒng)ISP架構(gòu),以成像引擎技術(shù)打造機(jī)器之眼
機(jī)器視覺(jué)在大型工件自動(dòng)探傷檢測(cè)中有哪些應(yīng)用?
基于工控機(jī)的機(jī)器視覺(jué),將開(kāi)啟智造新世界

機(jī)器視覺(jué)技術(shù)為機(jī)器點(diǎn)亮一雙“智慧之眼”
智造之眼?機(jī)器視覺(jué)飛拍,助力企業(yè)智造!

智造之眼丨在線(xiàn)沖壓機(jī)CCD視覺(jué)應(yīng)用

智造之眼?3C行業(yè)高速應(yīng)用場(chǎng)景

智造之眼?印刷標(biāo)簽數(shù)字模切視覺(jué)應(yīng)用

智造之眼?電聲行業(yè)膠水檢測(cè)

智造之眼?深入3D視覺(jué)應(yīng)用

智造之眼?新能源鋰電池視覺(jué)應(yīng)用

智造之眼丨深度學(xué)習(xí)應(yīng)用

人眼視覺(jué)和機(jī)器視覺(jué)的圖像傳感器有何不同?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論