 采用EP3CIOF256C8實現自適應鎖相環設計
采用EP3CIOF256C8實現自適應鎖相環設計
對于相位調制信號,相干解調為平均誤碼率最小的信號接收方式。相干解調需要在本地產生與接收載波信號同頻同相的載波副本,鎖相環是相干解調系統中獲取本地載波副本時常用的方法。對于鎖相環,噪聲水平和跟蹤速度是兩個非常重要的性能參數,二者均取決于環路帶寬但是不能同時達到最優。傳統鎖相環往往根據估算預先確定一個帶寬值,因而當噪聲環境發生變化時,該值可能不是最優值,甚至不適
合當前環境。在傳統鎖相環的基礎上引入了自適應調整模塊,根據當前環境自適應調整帶寬值,確保無論鎖相環處于固定或變化的噪聲環境中均能工作在比較合適的帶寬下,獲取較好的跟蹤效果。
1 同相正交環結構
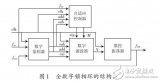
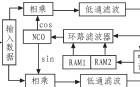
平方環和同相正交環都是解調系統中常用的跟蹤環路,平方環的工作頻率較高,對器件的性能要求較高,且平方環可能存在“理想平方器”的問題。如果同相正交環中的環路濾波器與平方環中的環路濾波器相同,則二者是等效的,同相正交環的環路中信號頻率較低,對器件的性能要求較低,因此設計中選用同相正交環。同相正交環主要由誤差提取模塊、數控振蕩器(NCO)和環路濾波器組成,如圖l所示。圖中虛線框為誤差提取模塊,用來鑒別本地振蕩信號與接收信號的載波分量之間的相位差。環路根據提取出的相位差信號,不斷調整本地NCO,最終使本地NCO和輸入信號的載波分量同頻同相,并在此基礎上對接收信號進行有效地相干解調。
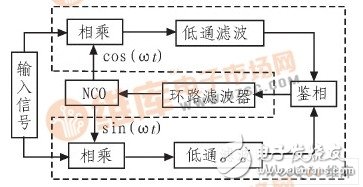
圖1 鎖相環基本結構圖
2 NCO實現及性能分析
NCO常用在直接數字合成器(DDS)中作為其數字實現部分。由此方法設計的DDS具有轉換時間短、分辨率高、低相噪和輸出相位連續等特點。在鎖相環中,NCO用于產生本地振蕩信號,由NCO同時產生本地的正弦及余弦信號。該模塊由頻率控制加法器、頻率控制累加寄存器和波形存儲器組成。輸入的頻率控制字在時鐘信號的驅動下進行累加,利用累加結果作為地址在波形存儲器中讀取預先存儲的正弦波數據。模擬鎖相環中,由模擬壓控振蕩器產生的本地正弦信號和余弦信號往往不能嚴格正交,利用數字方法實現的NCO時可以較好地解決這一問題,只需正確設置正弦信號和余弦信號對應的初始地址即可。頻率控制字f_con與輸出f_out的關系為,其中fs表示采樣頻率,系統中為80MHz,2N為波形存儲器的容量,N對應著該存儲器的輸入地址線的位數。
對于NCO,其性能主要體現在最小相位誤差和最小頻率分辨率上。波形存儲器中通常存儲一個周期的正弦波,因而最小相位誤差為:通過該式可以看出,N值取得越大,最小相位誤差越小。然而N越大,對應的存儲器容量越大,必然占用更多的邏輯資源,因而不能無限制地增加N值。設計中N取12,對應最小相位誤差為0.0015 rad。NCO的最小頻率分辨率為,其大小取決于頻率控制字的位數,為了有效增加頻率分辨率,取NCO的頻率控制字位數M稍大于N,設計中取M為16。
3 鑒相方法及性能分析
如圖l所示,鑒相模塊是鎖相環的核心模塊之一,其精度和鑒別范圍直接影響鎖相環的性能。系統接收信號為雙相移相鍵控(BPSK)信號,設輸入信號為s(t)=A(t)cos(2πfct+φc(t)),本地載波信號為cos(2πf0t+φ0)及sin(2πf0t+φ0)。將輸入的BPSK調制信號與NCO產生的2路本地載波信號分別進行相乘處理,對產生的乘積信號分別進行低通濾波,去除高頻信號。為保持信號的線性相位及系統的穩定性,可采用有限沖激響應(FIR)濾波器完成低通濾波處理。通過低通濾波處理去除高頻分量后,得到
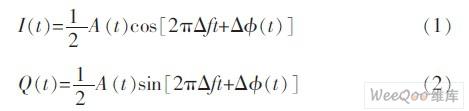
式中,Q(t)、I(t)分別為鎖相環環路的同相信號和正交相信號,其中

鑒相處理即是對上述信號進行相應處理以得到對應的相差信號。常用的鑒相方法有正弦鑒相法,2倍角正弦鑒相法,正切鑒相法和反正切鑒相法。其數學表達式分別對應為:sign(I(t))·Q(t),I(t)·Q(t),Q(t)/I(t)和arctan[Q(t)/I(t)]。鑒相法的線性度越好、鑒相范圍越廣,則相應的鎖相環可跟蹤的頻率范圍越大。利用仿真軟件MATLAB對上述4種鑒相法對應的鎖相環進行仿真。仿真參數對應實際系統中設置的參數,即采樣速率為80 MHz,接收信號中載波分量的頻率為lO MHz。多次實驗結果顯示:隨著起始頻差的不斷增加,2倍角正弦鑒相法對應的鎖相環最先出現跟蹤不上的情況,隨后是正弦鑒相法對應的鎖相環,最后是正切鑒相法和反正切鑒相法對應的鎖相環。
用FPGA實現上述4種鑒相器時,正弦鑒相法使用少量的邏輯語句即可實現,占用的邏輯資源較少;2倍角鑒相法需要使用一個乘法器模塊,在邏輯資源的占用上比正弦鑒相法稍多一些;正切鑒相法可選用查表法或者坐標旋轉數字計算機CORDIC方法,占用的邏輯資源較多;反正切鑒相法可使用CORDIC方法實現,占用的邏輯資源也比較多。設計中可根據系統的資源情況和性能要求在上述4種鑒相方法中進行選擇。本文中設計的模塊應用在基于FPGA的直序擴頻接收機中,對資源占用具有比較嚴格的限制,考慮到正弦鑒相法已經能夠滿足當前系統的性能要求,因此選用正弦鑒相法。
4 自適應鎖相環
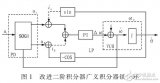
噪聲水平和跟蹤性能是鎖相環的兩個重要性能參數,但是二者是相互對立的,鎖相環處于噪聲環境中時,環路帶寬越大,跟蹤速度越快,同時引入的噪聲越多;環路帶寬越小,引入的噪聲越少,同時跟蹤速度越慢。通過對鎖相環的傳遞函數進行分析得出,鎖相環的環路帶寬取決于鎖相環中環路濾波器的帶寬,對環路濾波器的帶寬進行調整即是對鎖相環的帶寬進行調整。實際應用中,鎖相環處于噪聲水平較低的環境中時,其參數跟蹤速度更為重要,此時應盡可能增加環路帶寬,相反,噪聲水平較高時,獲取較小的相位抖動更重要,此時應盡可能減小環路帶寬,抑制噪聲信號。設計中按照這一思路,引入噪聲*估模塊,根據當前環境中噪聲的大小對環路濾波器的帶寬進行自適應調整。自適應鎖相環結構如圖2所示,自適應鎖相環在傳統鎖相環的基礎上引入了噪聲*估模塊和系數調整模塊。
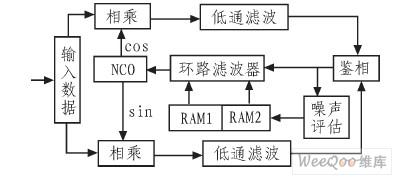
圖2 自適應鎖相環結構
4.1 環路濾波器
鎖相環中的環路濾波器是一個線性低通濾波器,它主要有2個功能:1)濾除誤差信號中的高頻分量;2)為鎖相環路提供一個短期的記憶,對環路的校正速度起到調節作用。模擬鎖相環中的環路濾波器由電阻、電容和運算放大器等線性元件組成,如RC積分濾波器、無源比例積分濾波器、有源比例積分濾波器等等,數字環路中的環路濾波器可利用雙線性變換和它們一一對應。設計中以有源比例積分濾波器為原型,通過雙線性變換得到。鎖相環的階數比環路濾波器的階數大1。環路濾波器的階數越高,對應鎖相環的跟蹤性能越強大,二階環路濾波器對應的三階鎖相環具有跟蹤加速度頻率輸入的特性,對于本系統,二階鎖相環已經滿足要求,因此采用一階環路濾波器,與之對應的環路濾波器的數字化結構如圖3所示。
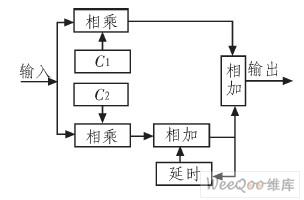
圖3 一階環路濾波器
圖3中C1、C2為環路濾波器的系數,將此濾波器的傳遞函數引入鎖相環,得出鎖相環的傳遞函數,對照標準形式
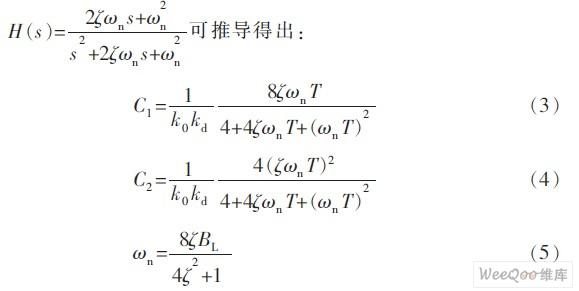
式中,ωn、T分別對應鎖相環的自然角頻率和環路調整時間間隔,可根據系統要求進行取值,設計中取T為采樣時間間隔,即每個點調整一次,ζ取常用值 0.707,ko、kd分別對應鑒相增益和相位控制靈敏度,BL表示環路噪聲等效帶寬。由式(3)~式(5)可知,噪聲等效噪聲帶寬BL和環路濾波器系數 C1、C2一一對應,因此改變噪聲帶寬即可通過調整系數C1、C2實現。傳統鎖相環中,取固定值,一般選取滿足條件BL≤ O.1Rb的值,其中Rb為信息數據速率。
4.2 系數調整
相干解調系統中,同步系統的相位誤差直接影響著系統的誤碼性能,其對應關系為:其中ψ為相位誤差。因此噪聲水平較高時,應該盡可能減小噪聲帶寬,近而減小ψ值,噪聲水平較低時,適當增加噪聲帶寬,加快跟蹤速度。
利用仿真軟件MATLAB對3種噪聲水平下的輸入信號進行相位跟蹤仿真,3種情況下,鎖相環參數相同,輸入的調制信號相同,不同的是對信號疊加3種功率不同的噪聲。結果顯示,鎖相環中引入的噪聲越大,則鑒相器模塊輸出信號的抖動越大。輸入信號的信噪比為5、10和20 dB時,鑒相器模塊的輸出信號如圖4所示。
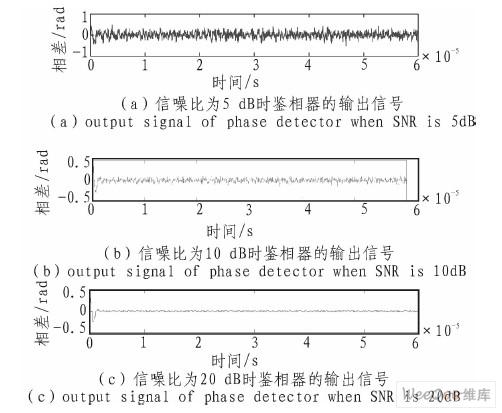
圖4 不同信噪音比下鑒相器和輸出信號
由圖4可以看出,噪聲水平越高,則鑒相器的輸出信號抖動越厲害,于是設計中利用鑒相器輸出信號的抖動狀況來判斷鎖相環中的噪聲水平,并根據噪聲水平來調整 C1、C2值。MATLAB仿真結果顯示,鑒相器的輸出值是在0值上下浮動,因此利用FPGA實現此功能時,可利用鑒相器輸出值的絕對值或平方值判斷噪聲大小,浮動越大則噪聲水平越高。利用單個點的抖動來判斷時,具有一定的偶然性,結果不準確,容易產生誤判,因此,在FPGA硬件板上利用VHDL編程實現時,對鑒相器的輸出數據取絕對值或進行平方處理,并對連續15個點的絕對值或平方值進行累加運算,利用累加的結果來判斷相位抖動的大小。對15個點取和時,利用樹形加法結構,引入流水線設計方法,使各個加法器并行工作,確保輸出結果的速率和輸入數據的速率相等。計算過程中使用絕對值代替平方值,能獲取與平方值相似的結果,有效降低運算量。進行帶寬調整時,可以利用當前應該設置的BL值計算出與之對應的環路濾波器系數C1、C2由式(3)~式(5)可以看出,通過BL計算C1、C2時比較復雜,涉及多次除法運算、乘法運算以及加法運算,在FPGA中,實現除法器、乘法器都是比較占用邏輯資源的,因此設計中不采用直接計算的方法,而是利用查找表法來實現,首先訂制2個容量為256的ROM,將可取的帶寬值平均劃分為256等分,對每個帶寬值對應的C1、C2 值預先進行計算,計算結果經量化處理后,以MIF文件的形式分別加載到ROM1、ROM2。ROM1、ROM2的地址線均為8位設計中連接到同一信號,對應地址范圍為0x00到OxFF,由圖2中的噪聲*估模塊產生。噪聲*估模塊輸出的初始值設置為0x7F,即初始帶寬值設置為可取范圍段的中間值,之后根據噪聲*估模塊的結果,與提前設定的上限值、下限值進行比較,并根據比較結果調整帶寬值,其中上限值、下限值通過仿真得出,這兩個域值與FPGA實現時采用的位寬、位截短處理、濾波處理等有關。為防止過于頻繁地進行調整,程序中設定,如果連續3次的抖動高于上限值且當前地址值大于Ox00,則減小帶寬值 (即地址減1),相反,若連續3次的抖動低于下限值且當前地址值小于0xFF,則增加帶寬值(即地址加1)。
鎖相環啟動工作時,不論噪聲水平高低,鑒相器輸出信號的抖動都比較大,連續3次抖動高于上限值是比較正常的,這時若將帶寬值減小,會降低跟蹤速度。因此設計中限定,只有本振信號的相位和接收載波信號的相位大致相符后,才允許減小帶寬值。因此環路設計中需要判斷相位是否大致相符。
參看結構圖l,經低通濾波后的同相和正交支路的信號分別為:

相位大致相符時,取值較小,I(t)2應大于Q(t)2。設計中利用條件判斷是否已滿足相位大致相符的條件。二者之差的下限值c同樣與系統中的輸入數據位數、濾波器等模塊有關系,可在Modelsim或Quartus下通過測試獲得。為了增加判斷的準確性,設計中同樣做出限定,連續3次滿足條件時,才判定相位已大致相符。
5 實驗結果及分析
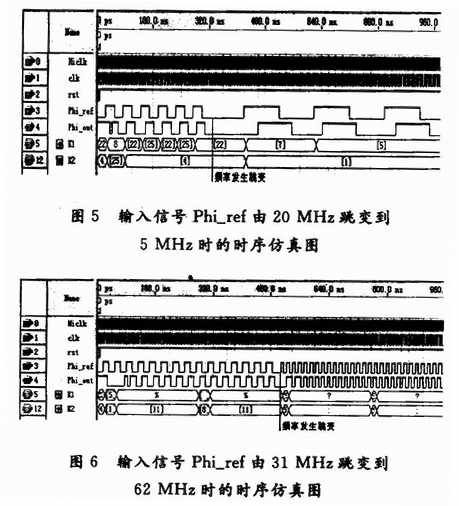
設置中頻載波信號為10 MHz,采樣頻率為80 MHz,本地初始中心頻率為9.9 MHz。在信噪比固定為25 dB和信噪比變化的情況下,分別利用傳統的鎖相環和圖2所示的自適應鎖相環進行相位跟蹤,得到的相差結果如圖5所示。
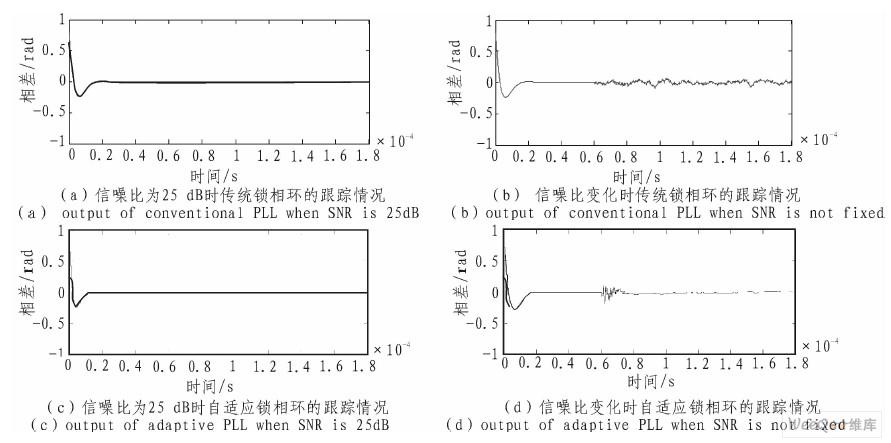
圖5 傳統的鎖相環和自適應鎖相環的跟蹤情況對比
通過仿真結果(圖5)可以看出,與傳統鎖相環相比,自適應鎖相環能夠根據當前環境自適應對環路帶寬作出調整,對環境的適應性更強。噪聲水平較低時,跟蹤速度是關鍵性能參數。在噪聲水平較低的情況下(對應25 dB),自適應跟蹤具有更快的跟蹤速度。噪聲水平較高時,相位抖動是關鍵參數,結果顯示,在噪聲水平較高的情況下,自適應鎖相環具有較小的抖動。
在此基礎上,在多種信噪比環境下進行實驗。信噪比較大即噪聲水平較低時,傳統鎖相環的自適應跟蹤的跟蹤速度結果如表1所示。信噪比較小即噪聲水平較高時,傳統鎖相環的自適應跟蹤的跟蹤速度結果如表2所示。
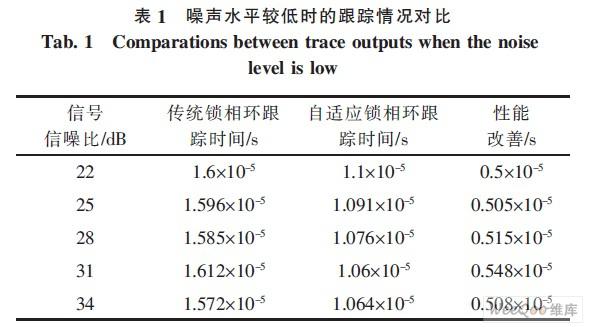
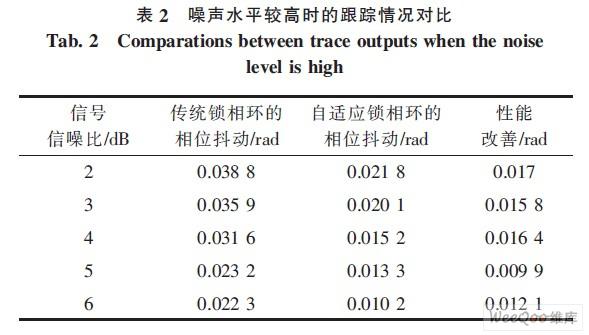
上述結果顯示,與傳統鎖相環相比,自適應鎖相環在噪聲水平較高時,具有更快的跟蹤速度,在噪聲水平較低時,最有更小的相位抖動,起到了根據環境作出自適應調整的作用。
系統設計中使用的FPGA是EP3CIOF256C8。將調試好的程序下載到FPGA硬件板,通過QUARTUSⅡ軟件中自帶的SIGNALTAP工具對輸入和輸出信號進行實時觀察,結果顯示,設計的自適應鎖相環能夠進行正確穩定的跟蹤,正確解調出數據信號。該模塊目前已應用在基于數字中頻方案的擴頻接收機中。
6 結論
在傳統鎖相環的基礎上,引入自適應參數調整模塊,能夠根據鎖相環所處環境的噪聲情況,自適應地對環路帶寬進行調整,由于調整過程中步長取值較小,具有一定的連續性,因此,調整過程中仍能正常進行數據解調,不會引起突變,能夠有效地在噪聲性能和跟蹤速度間進行平衡。
-
FPGA
+關注
關注
1643文章
21968瀏覽量
614310 -
存儲器
+關注
關注
38文章
7637瀏覽量
166457 -
加法器
+關注
關注
6文章
183瀏覽量
30615
發布評論請先 登錄
基于DSP Builder系統模型的數字鎖相環設計
一種新型帶寬自適應全數字鎖相環的設計方案
什么是鎖相環 鎖相環的組成 鎖相環選型原則有哪些呢?
快速建立時間的自適應鎖相環
基于FPGA的自適應鎖相環設計
鎖相環的研究和頻率合成

自適應鎖相環的分次諧波檢測優化算法





 工商網監
工商網監
評論