") 分析步進電機 完成控制系統(tǒng)的方案設(shè)計
分析步進電機 完成控制系統(tǒng)的方案設(shè)計

此文介紹了步進電機的控制原理,利用脈沖疊加原理,以Verilog HDL為實體設(shè)計輸入,設(shè)計并實現(xiàn)了一套集成于FPGA內(nèi)部的步進電機控制系統(tǒng)。該系統(tǒng)可以控制步進電機實現(xiàn)定速、加速、減速,且速率和加速度都能做到連續(xù)可調(diào)等功能。該方法具有設(shè)計簡單靈活,體積小,系統(tǒng)穩(wěn)定等優(yōu)點,可用于辦公自動化(Office Automation)、工廠自動化(Factory Automation)和計算機外部設(shè)備等場合。
步進電機又稱脈沖電動機,由于其具有易于精確地控制機械的移動量的優(yōu)點,步進電動機已 經(jīng)能與直流電動機、異步電動機、以及同步電動機并列,成為電動機的一種基本類型。步進電動 機在辦公自動化(Office Automation)、工廠自動化(Factory Automation)和計算機外部設(shè)備等領(lǐng)域中 廣泛地使用。
步進電機控制系統(tǒng)的設(shè)計方法主要有模擬控制方式及數(shù)字控制方式,其中數(shù)字控制方式又可 分為小規(guī)模數(shù)字電路控制電路、單片機控制電路以及專用邏輯電路等控制方式。模擬控制方式的 控制精度較低,抗干擾能力差,且不易用計算機控制。因此現(xiàn)在步進電機控制系統(tǒng)的設(shè)計主要利 用數(shù)字控制方式。但是小規(guī)模數(shù)字電路控制電路的體積較大,單片機控制電路的系統(tǒng)穩(wěn)定性不高, 而專用邏輯電路的價格又偏高。對此,本論文提出了應(yīng)用靈活的硬件描述語言Verilog HDL,設(shè)計 并實現(xiàn)了一套集成與FPGA 的高精度步進電機控制系統(tǒng)。經(jīng)過試驗和測試,該控制系統(tǒng)可以控制 步進電機實現(xiàn)定速、加速、減速,且速率和加減速度均連續(xù)可調(diào)等功能。系統(tǒng)除了具有控制精度 高和穩(wěn)定性強等優(yōu)點外,還具有體積小、簡單靈活、且成本低廉等優(yōu)點。
1.步進電機控制理論
1.1 控制原理
步進電機是由電脈沖信號控制的機電執(zhí)行元件,其控制原理如圖 1 所示。由圖1 可以看出, 步進電機的總旋轉(zhuǎn)角度與輸入脈沖總數(shù)成正比,而步進電機的轉(zhuǎn)速與每秒的輸入脈沖數(shù)目(脈沖速率:Pulse rate)成正比。

圖 1 所示的為輸入脈沖與旋轉(zhuǎn)角之間的關(guān)系(注:CW 方向:順時針方向;CCW 方向:逆時 針方向)。通過步進電機控制原理可以得出結(jié)論:設(shè)計步進電機控制系統(tǒng)的實質(zhì)就是設(shè)計脈沖信號 產(chǎn)生模塊輸出電機的控制脈沖。
1.2 控制脈沖發(fā)生器
步進電機控制系統(tǒng)的設(shè)計關(guān)鍵是設(shè)計產(chǎn)生控制步進電機的控制脈沖發(fā)生器。在設(shè)計中,應(yīng)用 脈沖疊加原理產(chǎn)生所需的控制脈沖,即:利用各種不同頻率的脈沖疊加來獲得控制系統(tǒng)所需要的 各種連續(xù)可調(diào)的不同頻率值的輸出脈沖。設(shè)計過程中用一個16 位的計數(shù)器來獲得不同頻率的脈沖 信號,且要求不同頻率的輸出脈沖之間不能重疊。16 位計數(shù)器的16 種不會重疊頻率狀態(tài)具體如表 1 所示。
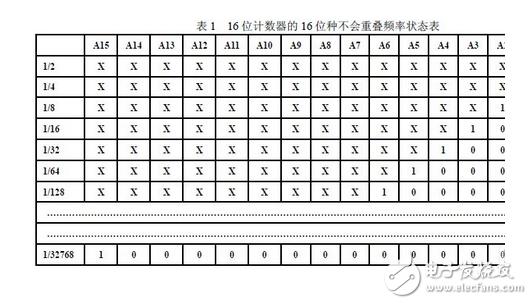
有了16 種不同頻率而且互相不重疊的脈沖后,就可以從中提取幾種來進行疊加,從而得到所 需的連續(xù)可調(diào)的輸出脈沖。由16 種不同頻率的脈沖來疊加成0~65535pps(pps:pulse per second) 中任何頻率的輸出脈沖的原理見下面的公式。

從上圖可以看出,只要將脈沖速率的二進制數(shù)值寫入16 位寄存器,就可以得到相應(yīng)速率的輸 出脈沖。
2.系統(tǒng)設(shè)計
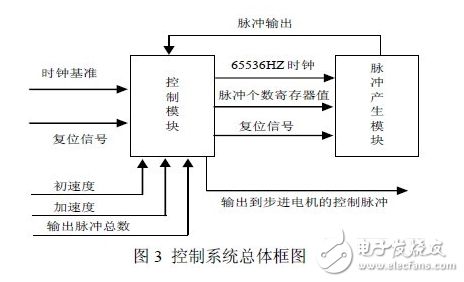
系統(tǒng)設(shè)計的總體框圖如圖 3 所示。步進電機的控制系統(tǒng)主要由兩個部分組成,即:脈沖產(chǎn)生 模塊及其控制模塊。
2.1 脈沖產(chǎn)生模塊
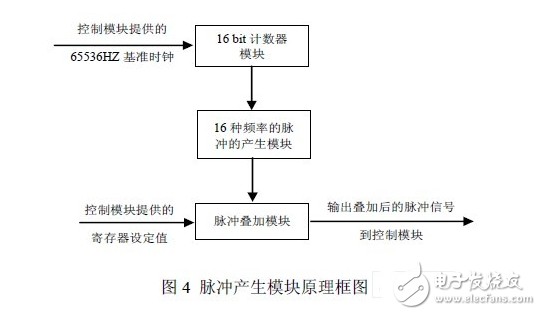
脈沖產(chǎn)生模塊是步進電機控制系統(tǒng)的核心部分,該模塊由 16bit 計數(shù)器、16 種頻率的脈沖產(chǎn) 生模塊和脈沖疊加模塊組成。在由16bit 計數(shù)器計數(shù)分頻產(chǎn)生16 種頻率信號后,根據(jù)表1 所示的 不重疊條件產(chǎn)生16 種脈沖,最后根據(jù)脈沖疊加原理,利用脈沖疊加模塊疊加出連續(xù)可調(diào)的脈沖控 制信號。其原理框圖如圖4 所示。
2.2 控制模塊
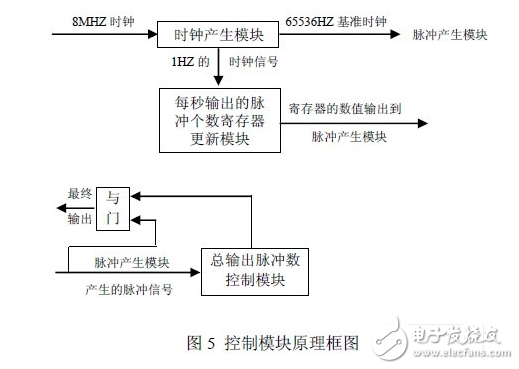
步進電機控制系統(tǒng)的控制模塊的主要功能是處理控制系統(tǒng)接收外部信息,如復(fù)位信號、電機 轉(zhuǎn)速等信息、控制系統(tǒng)的核心-脈沖產(chǎn)生電路產(chǎn)生控制步進電機的脈沖信號以及系統(tǒng)輸出脈沖的總 數(shù)和速度。控制模塊主要由頻率產(chǎn)生模塊,總輸出脈沖數(shù)控制模塊和每秒輸出的脈沖個數(shù)寄存器 更新模塊構(gòu)成。其原理框圖如圖5 所示。
3.系統(tǒng)檢驗與測試
在完成系統(tǒng)設(shè)計后,應(yīng)用Quartus Ⅱ軟件對系統(tǒng)的功能進行了在線仿真,觀察仿真后輸出的 控制脈沖信號,調(diào)試結(jié)果顯示基本正確。將該系統(tǒng)的程序燒錄到FPGA 芯片-EP1C3T144C8 后, 連接步進電機實際控制其定速、加速、減速轉(zhuǎn)動。試驗顯示,控制系統(tǒng)控制精確,且速率和加減 速度都能做到連續(xù)可調(diào)。
4.結(jié)論
經(jīng)過多次系統(tǒng)改進后,論文設(shè)計的步進電機控制系統(tǒng)具有較高的控制精度和系統(tǒng)穩(wěn)定度。且 由于該系統(tǒng)使用了集成芯片作為系統(tǒng)載體,相對于傳統(tǒng)的控制設(shè)備,具有體積小、靈活性強、且 價格低廉等優(yōu)點。
本文創(chuàng)新點:該方法具有設(shè)計簡單靈活,體積小,系統(tǒng)穩(wěn)定等優(yōu)點,可用于辦公自動化(Office Automation)、工廠自動化(Factory Automation)和計算機外部設(shè)備等場合。
-
步進電機
+關(guān)注
關(guān)注
152文章
3165瀏覽量
149479 -
脈沖發(fā)生器
+關(guān)注
關(guān)注
5文章
183瀏覽量
34710 -
數(shù)字控制
+關(guān)注
關(guān)注
2文章
193瀏覽量
26193
發(fā)布評論請先 登錄
步進電機控制系統(tǒng)設(shè)計一個開環(huán)步進電機控制系統(tǒng)
步進電機控制系統(tǒng)設(shè)計
步進電機控制系統(tǒng)的設(shè)計與實現(xiàn)
基于DSP和CAN總線的步進電機控制系統(tǒng)方案
步進電機控制系統(tǒng)原理應(yīng)用

基于單片機的步進電機開環(huán)控制系統(tǒng)
基于步進電機集散控制系統(tǒng)設(shè)計


基于STM32的步進電機控制系統(tǒng)
開環(huán)步進電機控制系統(tǒng)

步進電機控制系統(tǒng)程序如何設(shè)計






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論