 新型Cheetah機器狗不用眼睛也可以快速跳躍
新型Cheetah機器狗不用眼睛也可以快速跳躍
目前大部份的機器人都是靠「視覺」-- 無論是攝影機還是 Lidar -- 來判斷前進的路線,但在真實世界中這不一定總是可行,像是太暗或太不平整的表面,都可能會造成機器人誤判。我們人類當然也有碰到這樣狀況時候,但我們可以靠著身體接觸地面或其他表面的回饋,來作為判定的依據「摸黑」前進,因此 MIT 的機器專家們也想讓機器人也有類似的能力。
這研究的結果,就是最新一版的Cheetah機器狗,名為「Cheetah 3」。它內建的演算法共有兩種,一個可以綜合加速感應器、陀螺儀、關節的位置、以及馬達上的力回饋,計算出目前最好的反應來。例如當前腳感應到地上有凸起時,電腦就可以運算這個凸起的材質能不能支撐自己的重量、以及如何使力才能保持平衡地踩過去。另一個演算法則是負責定位,既使發生了偏離,依然可以計算出自己的位置,回到正確的軌道上。在后面的視頻中,可以看到Cheetah 3爬一個充滿雜物的樓梯,甚至跳到桌子上呢。
當然,不太可能機器人完全靠「摸」的來移動,這技術更多是配合視覺系的導航系統,在障礙多、空間狹小的地方來使用。核電廠的檢查、倒塌大樓的救助等,都是這技術能投入應用之處吧。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
陀螺儀
+關注
關注
44文章
831瀏覽量
99695 -
MIT
+關注
關注
3文章
254瀏覽量
24230 -
機器狗
+關注
關注
3文章
176瀏覽量
10458
原文標題:MIT研發Cheetah機器狗 不用眼睛就能爬、跑、跳
文章出處:【微信號:IEEE_China,微信公眾號:IEEE電氣電子工程師】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
10米/秒比肩博爾特!公司成立不到一年,開發出全球跑得最快的機器狗!
電子發燒友網報道(文/梁浩斌)世界上跑得最快的機器狗來了!近日,一款機器名為“黑豹Ⅱ”的四足機器人在網絡上爆火,官方發布的視頻顯示,黑豹Ⅱ的最高行走速度

通過易于使用的相機模組快速為應用添加機器視覺
) 的神經科學家就發現,大腦只需 13 毫秒 (ms) 就能根據眼睛看到的東西形成完整的圖像。 視覺如此重要,因此許多人都希望在機器上添加視覺傳感器就不足為奇了。為產品添加機器視覺,可以
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
ROS的全稱:Robot Operating System 機器人操作系統
ROS的 目的 :ROS支持通用庫,是通信總線,協調多個傳感器
為了解決機器人里各廠商模塊不通用的問題,讓機器人快速
發表于 04-30 01:05
不用編程不用聯網,PLC和儀表直接對SQL接數據庫,有異常時還可先將數據緩存
不用PLC編程也不用聯網,還不用電腦,采用IGT-DSER智能網關實現PLC和儀表直接對SQL接數據庫。
跟服務端通訊有異常時還可以先將數據
發表于 04-12 10:47
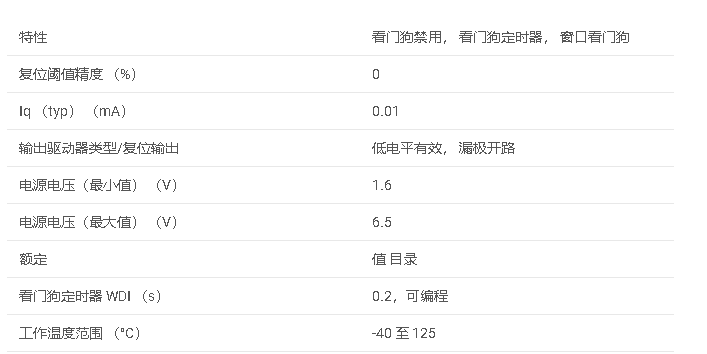
TPS3430 具有可編程復位延遲的窗口看門狗定時器數據手冊
(WDO) 復位延遲可通過工廠編程的默認延遲設置進行設置,也可通過外部電容器進行編程。可以通過 SET 引腳禁用看門狗,以避免在開發過程或開機期間出現意外的看門狗超時。
樹莓派遇上機器狗:科技界的“春晚明星”是怎樣煉成的?
機器人上春晚,這次穿上了東北花棉襖!每年春晚,總有一些節目讓人眼前一亮,今年也不例外!UnitreeH1機器人化身“秧BOT”,身著東北花棉襖,扭起了“賽博秧歌”,嚇壞了萌翻了全場觀眾。這已經不是

【國產FPGA必備教程】——紫光同創FPGA圖像視頻教程,適用于小眼睛FPGA盤古全系列開發板
連載更新40+期,請關注小眼睛科技官方vx公眾號、視頻號、dou音和B站觀看!
從開發入門到應用提高技能全覆蓋,源碼全開放,幫助您快速掌握國產FPGA。
發表于 02-19 15:44
ADS805E測量跳躍幅度很大,不知道是為什么?
我按照手冊上直流耦合連接電路,輸入是1.5V~3.5V范圍,SEL與VREF相連,用430定時器輸出轉換時鐘,結果測量直流時,AD測量結果在幾個值之間跳躍,跳躍幅度很大,不知道是為什么,引腳電壓控制用3.3V。
發表于 01-21 07:46
特朗普啟用帶激光雷達機器狗巡邏
據《紐約郵報》11月8日消息,勝選后特朗普加強了海湖莊園的安防細節:增加了一只美國特勤局的機器狗——照片顯示這只四條腿的機器狗正在草坪上巡邏。機器
如果設計一款桌面款的機器玩具,最吸引人的外觀與功能要有哪些?
初步設想制作如下其中一款,有感興趣的朋友可以幫提提意見。
A一款圓敦敦的音響狀的“個人日程助手”,具備番茄鬧鐘、音樂播放、減壓交互、語言對話、工作日報生成。
B一款迷你瓦利機器人,有一對可以與主人交互的手臂,以及表達情緒的
發表于 10-19 18:25
解鎖機器人視覺與人工智能的潛力,從“盲人機器”改造成有視覺能力的機器人(上)
正如人類依賴眼睛和大腦來解讀世界,機器人也需要自己的視覺系統來有效運作。沒有視覺,機器人就如同蒙上雙眼的人類,僅能執行預編程的命令,容易碰撞障礙物,并犯下代價高昂的錯誤。這正是


如何快速設計和部署 IIoT 就緒型機器
作者:Jeff Shepard 投稿人:DigiKey 北美編輯 2024-08-14 快速設計和部署可直接集成到工業物聯網 (IIoT) 的機器并非易事。IIoT 就緒型機器必須能為機器

機器人的 “眼睛”——MT6816 磁編碼 IC 的智能除草機器人
在農業現代化的進程中,智能除草機器人逐漸嶄露頭角,成為提高農業生產效率、減少化學除草劑使用、保護環境的有力工具。而在這些智能除草機器人中,MT6816 磁編碼 IC 就如同機器人的 “眼睛
連做兩只機器狗,終于拿捏了這些算法……
工程名稱:并聯臂四足機器狗前言用STM32做了兩只四足機器狗,它可以:走來走去玩拔河游戲(單方面碾壓版)啟動穿越火線形態爬坡無壓力這么靈活的






 工商網監
工商網監
評論