") Linux系統(tǒng)中的實時調(diào)度器DL調(diào)度器的原理是什么?詳細概述
Linux系統(tǒng)中的實時調(diào)度器DL調(diào)度器的原理是什么?詳細概述

一、概述
實時系統(tǒng)是這樣的一種計算系統(tǒng):當事件發(fā)生后,它必須在確定的時間范圍內(nèi)做出響應(yīng)。在實時系統(tǒng)中,產(chǎn)生正確的結(jié)果不僅依賴于系統(tǒng)正確的邏輯動作,而且依賴于邏輯動作的時序。換句話說,當系統(tǒng)收到某個請求,會做出相應(yīng)的動作以響應(yīng)該請求,想要保證正確地響應(yīng)該請求,一方面邏輯結(jié)果要正確,更重要的是需要在最后期限(deadline)內(nèi)作出響應(yīng)。如果系統(tǒng)未能在最后期限內(nèi)進行響應(yīng),那么該系統(tǒng)就會產(chǎn)生錯誤或者缺陷。在多任務(wù)操作系統(tǒng)中(如Linux),實時調(diào)度器(realtime scheduler)負責協(xié)調(diào)實時任務(wù)對CPU的訪問,以確保系統(tǒng)中的所有的實時任務(wù)在其deadline內(nèi)完成。
如果對實時任務(wù)進行抽象,那么它需要三個元素:周期(period),運行時間(runtime)和最后期限(deadline)。Deadline調(diào)度器正是利用了這一點(指對實時任務(wù)完美的抽象),允許用戶來指定該任務(wù)的具體需求,從而使系統(tǒng)能夠做出最好的調(diào)度決策,即使在負載很高的系統(tǒng)中也能保證實時任務(wù)的調(diào)度。
二、Linux系統(tǒng)中的實時調(diào)度器
實時任務(wù)和非實時任務(wù)(或者普通任務(wù))的區(qū)別是什么?實時任務(wù)有deadline,超過deadline,將不能產(chǎn)生正確的邏輯結(jié)果,非實時任務(wù)則沒有這個限制。為了滿足實時任務(wù)的調(diào)度需求,Linux提供了兩種實時調(diào)度器:POSIX realtime scheduler(后文簡稱RT調(diào)度器)和deadline scheduler(后文簡稱DL調(diào)度器)。
RT調(diào)度器有兩種調(diào)度策略:FIFO(first-in-first-out)和RR(round-robin)。無論FIFO還是RR,RT調(diào)度器都是根據(jù)任務(wù)的實時優(yōu)先級(Linux進程描述符中的rt_priority成員)進行調(diào)度。最高優(yōu)先級的任務(wù)將最先獲得CPU資源。在實時理論中,這種調(diào)度器被歸類為固定優(yōu)先級調(diào)度器(fixed-priority scheduler,即每一個rt任務(wù)都固定分配一個優(yōu)先級)。當實時優(yōu)先級不同的時候,F(xiàn)IFO和RR沒有什么不同,只有在兩個任務(wù)具有相同優(yōu)先級的時候,我們才可以看出FIFO和RR之間的區(qū)別。對于FIFO調(diào)度器,最先進入runnable狀態(tài)的任務(wù)將首先獲取CPU資源,并且一直占用該資源,直到該進程進入睡眠狀態(tài)。而對于RR調(diào)度器,具有相同優(yōu)先級的任務(wù)將以輪流執(zhí)行的方式共享處理器資源。當某個RR任務(wù)開始運行后,如果該任務(wù)不會阻塞,那么它將一直運行,直到分配給該任務(wù)的時間片到期。當時間片用完,調(diào)度器將把該任務(wù)放在任務(wù)鏈表的末端(注意,只有相同優(yōu)先級的任務(wù)才會放到一個鏈表中,不同優(yōu)先級在不同的鏈表中),并從任務(wù)鏈表中選擇下一個任務(wù)去執(zhí)行。
和RT調(diào)度器不同,DL調(diào)度器是按照任務(wù)的deadline進行調(diào)度的(從名字也看的出來,哈哈)。當產(chǎn)生一個調(diào)度點的時候,DL調(diào)度器總是選擇其Deadline距離當前時間點最近的那個任務(wù)并調(diào)度它執(zhí)行。調(diào)度器總是根據(jù)任務(wù)的配置參數(shù)進行調(diào)度,對于RT調(diào)度器而言,用戶需要配置任務(wù)的調(diào)度策略(FIFO或者RR)和那個固定的實時優(yōu)先級。例如:
chrt -f 10 video_processing_tool
通過上面的命令,video_processing_tool任務(wù)會歸于RT調(diào)度器管理,其實時優(yōu)先級是10,調(diào)度策略是FIFO(-f參數(shù))
對于DL調(diào)度器,用戶需要設(shè)定三個參數(shù):周期(period)、運行時間(runtime)和最后期限(deadline)。周期和該實時任務(wù)的工作模式相關(guān)。例如:對于一個視頻處理任務(wù),它的主要的工作是每秒鐘處理60幀的視頻數(shù)據(jù),即每16毫秒需要處理每一幀視頻,因此,該任務(wù)的周期就是16ms。
對于實時任務(wù),一個周期內(nèi)總是有固定的“工作”要做,例如在視頻任務(wù)中,所謂的工作就是對一幀視頻數(shù)據(jù)進行處理,Runtime是完成這些“工作”需要的CPU執(zhí)行時間,即在一個周期中,需要CPU參與運算的時間值。在設(shè)定運行時間參數(shù)的時候我們不能太樂觀,runtime在設(shè)定的時候必須考慮最壞情況下的執(zhí)行時間(worst-case execution time ,WCET)。例如,在視頻處理中,各個幀的情況可能不太一樣(一方面幀間的相關(guān)性不同,另外,即便是針對一幀數(shù)據(jù),其圖像像素之間的相關(guān)性也不同),有些會耗時長一些,有些會短一些。如果處理時間最長的那幀視頻需要5毫秒來處理,那么它的runtime設(shè)定就是五毫秒。
最后我們來說說Deadline參數(shù)。在一個實時任務(wù)的工作周期內(nèi),deadline定義了處理完成的結(jié)果必須被交付的最后期限。我們還是以上面的視頻處理任務(wù)為例,在一個視頻幀的處理周期中(16ms),如果該任務(wù)需要在該周期的前10毫秒內(nèi)把處理過的視頻幀傳送給下一個模塊,那么deadline參數(shù)就是10毫秒。為了達到這個要求,顯然在該周期的前10ms就必須完成一幀數(shù)據(jù)的處理,即5ms的runtime必須位于該周期的前10ms時間范圍內(nèi)。
通過chrt命令我們可以設(shè)定deadline調(diào)度參數(shù),例如:上面的視頻任務(wù)可以這樣設(shè)定:
chrt -d --sched-runtime 5000000 --sched-deadline 10000000 \
--sched-period 16666666 0 video_processing_tool
其中“-d”參數(shù)說明設(shè)定的調(diào)度策略是deadline,“--sched-runtime 5000000”是將運行時間參數(shù)設(shè)定為5ms,“--sched-deadline 10000000”是將deadline設(shè)定為10ms,“--sched-period 16666666”則是設(shè)定周期參數(shù)。命令行中的“0”是優(yōu)先級占位符,DL調(diào)度器并不使用優(yōu)先級參數(shù)。
通過上面的設(shè)定,我們可以確保每16ms的周期內(nèi),DL調(diào)度器會分配給該任務(wù)5ms的CPU運行時間,而且這個5ms的CPU時間會保證在10ms內(nèi)的deadline之前配備給該任務(wù),以便該任務(wù)完成處理并交付給下一個任務(wù)或者軟件模塊。
Deadline的參數(shù)看似復雜,其實簡單,因為只要知道了task的行為,就可以推斷出其調(diào)度參數(shù)并進行設(shè)定。也就是說deadline任務(wù)的調(diào)度參數(shù)只和自己相關(guān),和系統(tǒng)無關(guān)。RT task則不然,它需要綜合整個系統(tǒng)來看,把適合的rt priority配置給系統(tǒng)中的各個rt task,以確保整個系統(tǒng)能正常的運作(即在deadline之前,完成各個rt task的調(diào)度執(zhí)行)。
由于deadline任務(wù)明確的告知了調(diào)度器自己對CPU資源的需求,因此,當一個新的deadline task被創(chuàng)建,進入系統(tǒng)的時候,DL調(diào)度器可以知道CPU是否可以承擔這個新創(chuàng)建的DL task。如果系統(tǒng)比較空閑(DL任務(wù)不多),那么可以該task進入調(diào)度,如果系統(tǒng)DL任務(wù)已經(jīng)很多,新加入的DL任務(wù)已經(jīng)導致CPU利用率超過100%,那么DL調(diào)度器會將其拒之門外。一旦DL任務(wù)被接納,那么DL調(diào)度器則可以確保該DL task可以按照其調(diào)度參數(shù)的要求正確的執(zhí)行。
為了進一步討論DL調(diào)度器的好處,我們有必要后退一步,看看實時調(diào)度的藍圖。因此,下一節(jié)我們將描述一些實時調(diào)度的理論知識。
三、實時調(diào)度概述
在調(diào)度理論中,怎么來評估實時調(diào)度器的性能呢?具體的方法就是創(chuàng)建一組實時任務(wù)(后文稱之實時任務(wù)集)讓調(diào)度器來調(diào)度執(zhí)行,看看是否能夠完美的調(diào)度任務(wù)集中的所有任務(wù),即所有實時任務(wù)的時間要求(deadline)都可以得到滿足。為了能夠在確定的時間內(nèi)響應(yīng)請求,實時任務(wù)必須在確定的時間點內(nèi)完成某些動作。為此,我們需要對實時任務(wù)進行抽象,總結(jié)出其任務(wù)模型來描述這些動作確定性的時序。
每個實時任務(wù)都有N個不斷重復的“工作”(job)組成,如果一個rt task所進行的工作總是在固定的時間間隔內(nèi)到來,那么我們成該任務(wù)是周期性的(Periodic)。例如一個音頻處理程序每隔20ms就會對一幀音頻數(shù)據(jù)進行壓縮。任務(wù)也可以是零散到來的(sporadic),sporadic task類似periodic task,只不過對周期要求沒有那么嚴格。對于sporadic task而言,它只定義了一個最小的時間間隔。假如這個最小時間間隔是20ms,那么job可能在距離上一次20ms后到來,也可能30ms到來,但是不會小于20ms。最后一種是非周期任務(wù),沒有任何固定的模式。
上一段總結(jié)了實時任務(wù)的工作模式,下面我們看看deadline的分類。一個實時任務(wù)的Deadline有三種:第一種是隱含性的deadline(implicit deadline),即并不明確的定義deadline,其值等于period參數(shù)。這一種實時任務(wù)對時間要求相對比較低,只要在該周期內(nèi)分配了runtime的CPU資源即可。第二種是受限型deadline(constrained deadline),即deadline小于(或者等于)period參數(shù),這種實時任務(wù)對時間的要求高一些,需要在周期結(jié)束之前的某個時間范圍內(nèi)分配CPU資源。最后一種是arbitrary deadline:即deadline和周期沒有關(guān)系。
根據(jù)抽象出來的任務(wù)模式,實時研究人員已經(jīng)開發(fā)出一種評估調(diào)度算法優(yōu)劣的方法:首先給定一組任務(wù)(包括了各種各樣前面描述的實時任務(wù)類型),讓被測試的調(diào)度器去調(diào)度這一組任務(wù),以此來評估該調(diào)度器的調(diào)度能力。結(jié)果表明,在單處理器系統(tǒng)中,采用Early Deadline First(EDF)算法的調(diào)度器被認為是最佳的。之所以說它是最好的,言外之意就是當該調(diào)度器無法完成某個任務(wù)集調(diào)度的時候,其他調(diào)度器也無能為力。當在單處理器系統(tǒng)上調(diào)度periodic 和sporadic任務(wù),并且deadline總是小于或等于周期參數(shù)(也就是constrained deadline)的時候,基于deadline參數(shù)進行調(diào)度的調(diào)度器性能優(yōu)異,表現(xiàn)最佳。實際上,對于那些deadline等于period參數(shù)(即implicit deadline)的periodic或者sporadic tasks,只要被調(diào)度的那組任務(wù)不使用超過100%的CPU時間,那么EDF調(diào)度器都可以正常的完成調(diào)度,滿足每一個rt task的deadline要求。Linux DL調(diào)度器實現(xiàn)了EDF算法。
我們舉一個實際的例子,假設(shè)系統(tǒng)中有三個周期性任務(wù),參數(shù)如下(deadline等于period):
這三個任務(wù)對 CPU時間的利用率還沒有達到100%:CPU利用率 = 1/4 + 2/6 + 3/8 = 23/24
對于這樣的一組實時任務(wù),EDF調(diào)度器的調(diào)度行為如下圖所示:
通過上圖可知3個rt任務(wù)都很好的被調(diào)度,滿足了各自的deadline需求。如果使用固定優(yōu)先級的調(diào)度器(例如Linux內(nèi)核中的FIFO)會怎樣呢?其實不管如何調(diào)整各個rt task的優(yōu)先級,都不能很好的滿足每個任務(wù)的deadline要求,總會有一個任務(wù)的Job會在deadline之后完成,具體參考下面的圖片:
基于deadline的調(diào)度算法最大的好處是:一旦知道了一個實時任務(wù)集中每個任務(wù)的調(diào)度參數(shù),其實根本不需要分析其他任務(wù),你也能知道該實時任務(wù)集是否能在deadline之前完成。在單處理器系統(tǒng),基于deadline進行調(diào)度所產(chǎn)生的上下文切換次數(shù)往往會比較少。此外,在保證每個任務(wù)都滿足其deadline需求的條件下,基于deadline的調(diào)度算法可以調(diào)度的任務(wù)數(shù)目比固定優(yōu)先級的調(diào)度算法要多。當然,基于deadline參數(shù)進行調(diào)度的調(diào)度器(后面簡稱deadline調(diào)度器)也有一些缺點。
deadline調(diào)度器雖然可以保證每個RT任務(wù)在deadline之前完成,但是并不能保證每一個任務(wù)的最小響應(yīng)時間。對于那些基于固定優(yōu)先級的進行調(diào)度的調(diào)度器(后文簡稱priority調(diào)度器),高優(yōu)先級的任務(wù)總是有最小的響應(yīng)延遲時間。EDF調(diào)度算法的priority調(diào)度算法要復雜一些。priority調(diào)度算法的復雜度可以是O(1)(例如Linux中的RT調(diào)度器),相比之下,deadline調(diào)度器的復雜度是O(log(n))(例如Linux中的DL調(diào)度器)。不過priority調(diào)度器需要為每一個task選擇一個最適合的優(yōu)先級,這個最優(yōu)優(yōu)先級的計算過程可能是離線的,這個算法的復雜度是O(N!)。
如果系統(tǒng)出于某種原因發(fā)生過載,例如由于新任務(wù)添加或錯誤的估計了WCET,這時候,deadline調(diào)度有可能會有一個多米諾效應(yīng):當一個任務(wù)出現(xiàn)問題,影響的并非僅僅是該任務(wù),這個問題會擴散到系統(tǒng)中的其他任務(wù)上去。我們考慮這樣的場景,由于運行時間超過了其runtime參數(shù)指定的時間,調(diào)度器在deadline之后才完成job,并交付給其他任務(wù),這個issue很影響系統(tǒng)中所有其他的任務(wù),從而導致其他任務(wù)也可能會錯過deadline,如紅下面的區(qū)域所示:
而對于那些基于固定優(yōu)先級的調(diào)度算法則相反,當一個任務(wù)出問題的時候,受影響的只是那個優(yōu)先級最低的task。(順便說一句:在linux中,DL調(diào)度器中實現(xiàn)了CBS,從而解決了多米諾效應(yīng),下一篇文檔會詳述。)
在單核系統(tǒng)中,調(diào)度器只需要考慮任務(wù)執(zhí)行先后順序的問題,在多核系統(tǒng)中,除了任務(wù)先后問題,調(diào)度器還需要考慮CPU分配問題。也就是說,在多核系統(tǒng)中,調(diào)度器還需要決定任務(wù)在那個CPU上運行。一般來說,調(diào)度器可以被劃分為以下幾類:
(1)全局類(Global):即一個調(diào)度器就可以管理系統(tǒng)中的所有CPU,任務(wù)可以在CPU之間自由遷移。
(2)集群類(Clustered):系統(tǒng)中的CPU被分成互不相交的幾個cluster,調(diào)度器負責調(diào)度任務(wù)到cluster內(nèi)的CPU上去。
(3)分區(qū)類(Partitioned ):每個調(diào)度器只管自己的那個CPU,系統(tǒng)有多少個CPU就有多少個調(diào)度器實體。
(4)任意類(Arbitrary ):每一個任務(wù)都可以運行在任何一個CPU集合上。
對于partitioned deadline調(diào)度器而言,多核系統(tǒng)中的調(diào)度其實就被嚴格分解成一個個的單核deadline調(diào)度過程。也就是說,partitioned deadline調(diào)度器的性能是最優(yōu)的。不過,多核系統(tǒng)中的global、clustered和arbitrary deadline調(diào)度器并非最優(yōu)。例如,在一個有M個處理器的系統(tǒng)中,如果有M個runtime等于period參數(shù)的實時任務(wù)需要調(diào)度,調(diào)度器很容易處理,每個CPU處理一個任務(wù)即可。我們可以進一步具體化,假設(shè)有四個“大活”,runtime和period都是1000ms,一個擁有四個處理器的系統(tǒng)可以分別執(zhí)行這四個“大活”,在這樣的場景下,CPU利用率是400%:
4 * 1000/1000 = 4
調(diào)度的結(jié)果如下圖所示:
在這么重的負載下,調(diào)度器都能工作起來,每個“大活”的deadline都得到滿足。當系統(tǒng)的負載比較輕的情況下,我們直覺就認為調(diào)度器也應(yīng)該能hold住場面。下面我們構(gòu)造一個輕負載:調(diào)度器要面對的是4個“小活”和一個“大活”,“小活”的runtime是1ms,周期是999ms,“大活”同上。在這種場景下,系統(tǒng)的CPU利用率是100.4%:
4 * (1/999) + 1000/1000 = 1.004
1.004是遠遠小于4的,因此,我們直觀上感覺調(diào)度器是可以很好的調(diào)度這個“4小一大”的調(diào)度場景的。然而實時并非如此,單核上表現(xiàn)最優(yōu)的EDF調(diào)度器,在多核系統(tǒng)中會出現(xiàn)問題(指Global EDF調(diào)度器)。具體原因是這樣的:如果所有任務(wù)同時釋放,4個小活(deadline比較早)將會被調(diào)度在4個CPU上,這時候,“大活”只能在“小活”運行完畢之后才開始執(zhí)行,因此“大活”的deadline不能得到滿足。如下圖所示。這就是眾所周知的Dhall效應(yīng)(Dhall‘s effect)。
把若干個任務(wù)分配給若干個處理器執(zhí)行其實是一個NP-hard問題(本質(zhì)上是一個裝箱問題),由于各種異常場景,很難說一個調(diào)度算法會優(yōu)于任何其他的算法。有了這樣的背景知識,我們就可以進一步解析Linux內(nèi)核中的DL調(diào)度器的細節(jié),看看它是如何避免潛在的問題,發(fā)揮其強大的調(diào)度能力的。欲知詳情,且聽下回分解。
-
cpu
+關(guān)注
關(guān)注
68文章
11080瀏覽量
217065 -
Linux
+關(guān)注
關(guān)注
87文章
11511瀏覽量
213795 -
調(diào)度器
+關(guān)注
關(guān)注
0文章
98瀏覽量
5502
發(fā)布評論請先 登錄
Linux的Deadline實時調(diào)度算法

深入探討Linux的進程調(diào)度器

Linux系統(tǒng)調(diào)度簡介
Linux系統(tǒng)調(diào)度是實現(xiàn)特性的關(guān)鍵部分
最遲預分配容錯實時調(diào)度算法設(shè)計與分析
Linux 2.6進程調(diào)度
實時操作系統(tǒng)任務(wù)調(diào)度策略的研究與設(shè)計
多處理器分組實時調(diào)度算法
系統(tǒng)實時事件驅(qū)動和時間驅(qū)動相結(jié)合的調(diào)度方法

通過實時調(diào)度與日前調(diào)度的協(xié)調(diào)使換電站抑制波動影響同時兼顧用戶利益
Linux內(nèi)核的DL調(diào)度器的細節(jié)和怎么樣使用DL調(diào)度器?

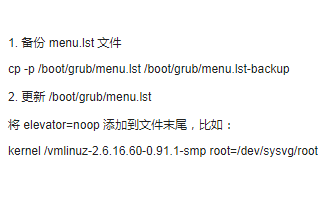
如何更改 Linux 的 I/O 調(diào)度器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論