") Apollo2.5帶來(lái)的更低成本的解決方案
Apollo2.5帶來(lái)的更低成本的解決方案
2018年6月23日,由百度主辦、佐思產(chǎn)研、佐智汽車(chē)承辦的第4期《Hello Apollo,自動(dòng)駕駛公開(kāi)課》——“Apollo2.5限定場(chǎng)景低成本技術(shù)方案解析”在上海市徐匯區(qū)COCOSPACE成功舉辦,吸引了近300位來(lái)自車(chē)企、零部件企業(yè)、自動(dòng)駕駛初創(chuàng)企業(yè)、高校等的開(kāi)發(fā)者參加。本次公開(kāi)課邀請(qǐng)了百度自動(dòng)駕駛事業(yè)部的資深工程師們以及Apollo的生態(tài)合作伙伴,一起與開(kāi)發(fā)者們交流。
2018年4月19日,百度對(duì)外發(fā)布Apollo 2.5版本。該版本支持限定區(qū)域視覺(jué)高速自動(dòng)駕駛,提供更多場(chǎng)景、更低成本、更高性能的能力支持,Apollo平臺(tái)開(kāi)發(fā)者真正所需,開(kāi)放了視覺(jué)感知、實(shí)時(shí)相對(duì)地圖、高速規(guī)劃與控制三大能力以及更高效的開(kāi)發(fā)工具,助力開(kāi)發(fā)者迅速起步,快速完成驗(yàn)證。
值得一提的是,Apollo2.5帶來(lái)的更低成本的解決方案,通過(guò)基于攝像頭的視覺(jué)感知方案,傳感器成本可較此前降低90%,大大降低了自動(dòng)駕駛研發(fā)門(mén)檻。Apollo2.5版本還開(kāi)放可視化的調(diào)試工具、Apollo高精地圖數(shù)據(jù)采集器、Apollo云端仿真模擬器等更高效的開(kāi)發(fā)工具,進(jìn)一步提升開(kāi)發(fā)者研發(fā)效率。
在本次公開(kāi)課中,百度的工程師們對(duì)限定場(chǎng)景低成本技術(shù)方案及更多應(yīng)用場(chǎng)景方面與開(kāi)發(fā)者進(jìn)行案例分享。
楊凡,百度自動(dòng)駕駛事業(yè)部資深架構(gòu)師,負(fù)責(zé)產(chǎn)品化解決方案
楊凡老師主要介紹了Apollo開(kāi)放平臺(tái)簡(jiǎn)介、Apollo能力開(kāi)放簡(jiǎn)介、Apollo資源開(kāi)放與研發(fā)迭代新模式、Apollo生態(tài)階段性成果進(jìn)行介紹。
楊凡老師提到了Apollo2.5中Relative Map的幾種工作模式。首先是工作場(chǎng)景只有Perception信息,只能完成Lane Keep 和ACC;如果是有Perception信息和導(dǎo)航線(xiàn),可以完成Freeway和Rural Area的自動(dòng)行駛,如果有HDMap+Navigator+Perception就可以完成L4級(jí)別的自動(dòng)行駛了。
詹錕,百度自動(dòng)駕駛事業(yè)部資深研發(fā)工程師,負(fù)責(zé)預(yù)測(cè)核心算法方向
詹錕老師主要從以下3個(gè)方面對(duì)Apollo2.5的預(yù)測(cè)系統(tǒng)進(jìn)行了詳細(xì)介紹:
自動(dòng)駕駛為什么需要預(yù)測(cè),預(yù)測(cè)的作用是什么,如果沒(méi)有預(yù)測(cè)會(huì)怎樣?
從代碼層面看一下Apollo的預(yù)測(cè)系統(tǒng)代碼是怎么實(shí)現(xiàn)的,然后每一個(gè)模塊分別做什么,如果開(kāi)發(fā)者要改動(dòng)或者修改應(yīng)該怎么介入。
Apollo預(yù)測(cè)系統(tǒng)還遇到實(shí)際場(chǎng)景的困惑,展示實(shí)際路測(cè)遇到的一些困難以及解決方案。
朱帆,百度自動(dòng)駕駛事業(yè)部架構(gòu)師,負(fù)責(zé)決策規(guī)劃多個(gè)核心算法
無(wú)人車(chē)決策規(guī)劃是自動(dòng)駕駛領(lǐng)域的核心技術(shù)之一,自Apollo 1.5開(kāi)放以來(lái)受到了業(yè)界的廣泛關(guān)注。Apollo 2.5相對(duì)于之前版本向大家展示了另一種規(guī)劃控制的設(shè)計(jì)思路 - Lattice Planner。朱帆老師對(duì)其框架、算法使用以及優(yōu)勢(shì)進(jìn)行了分享。
王欣可,青島托爾泰克機(jī)器人有限公司技術(shù)總監(jiān)
基于A(yíng)pollo1.0開(kāi)源框架實(shí)現(xiàn)了農(nóng)業(yè)場(chǎng)景低速無(wú)人駕駛
隨著Apollo 1.0開(kāi)放了封閉園區(qū)循跡自動(dòng)駕駛能力,向汽車(chē)行業(yè)及自動(dòng)駕駛領(lǐng)域的合作伙伴提供一個(gè)開(kāi)放、完整、安全的軟件平臺(tái),青島托爾泰克機(jī)器人有限公司技術(shù)總監(jiān)分享了Apollo+農(nóng)業(yè)機(jī)器人的適配過(guò)程。王老師表示,2018年7月5日托爾泰克整套農(nóng)業(yè)場(chǎng)景機(jī)器人解決方案將亮相“2018百度AI開(kāi)發(fā)者大會(huì)”。2018年秋天,全球首個(gè)“無(wú)人值守”農(nóng)場(chǎng)將對(duì)外開(kāi)放。
欒寧,百度Apollo合作發(fā)展部物流行業(yè)高級(jí)經(jīng)理,負(fù)責(zé)Apollo生態(tài)合作&拓展
欒寧主要介紹了Apollo生態(tài)合作的模式,如何從場(chǎng)景、技術(shù)、資金等多方面賦能開(kāi)發(fā)者,以及Apollo開(kāi)放一年多以來(lái),產(chǎn)生的優(yōu)秀合作案例分享。
2018年無(wú)人車(chē)將實(shí)現(xiàn)量產(chǎn),大家以后會(huì)在更多地區(qū)看到無(wú)人小巴,以后Apollo會(huì)和北汽、江淮、奇瑞合作,生產(chǎn)L3級(jí)別的小巴,可用于在機(jī)場(chǎng)、碼頭做封閉的運(yùn)輸,行駛環(huán)境相對(duì)比較簡(jiǎn)單,車(chē)道比較清晰,路況比較好,封閉園區(qū)內(nèi)不受法規(guī)限制,這樣更有利于在封閉園區(qū)的量產(chǎn)應(yīng)用。
楊凡老師表示Apollo會(huì)在2018年、2019年一步一步的達(dá)到L4、L5級(jí)別。Apollo在Github已經(jīng)有9000多個(gè)活躍的開(kāi)發(fā)者,已經(jīng)有2000以上的開(kāi)發(fā)者Forks了代碼,進(jìn)行了自己的自動(dòng)駕駛開(kāi)發(fā),總共所有的開(kāi)發(fā)者貢獻(xiàn)的代碼行數(shù)已超過(guò)20萬(wàn)行,是世界上最活躍的自動(dòng)駕駛社區(qū)。
-
傳感器
+關(guān)注
關(guān)注
2563文章
52589瀏覽量
763759 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14201瀏覽量
169542 -
Apollo
+關(guān)注
關(guān)注
5文章
347瀏覽量
18707
原文標(biāo)題:“深度解析Apollo2.5,限定場(chǎng)景低成本技術(shù)方案”公開(kāi)課成功召開(kāi)
文章出處:【微信號(hào):zuosiqiche,微信公眾號(hào):佐思汽車(chē)研究】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
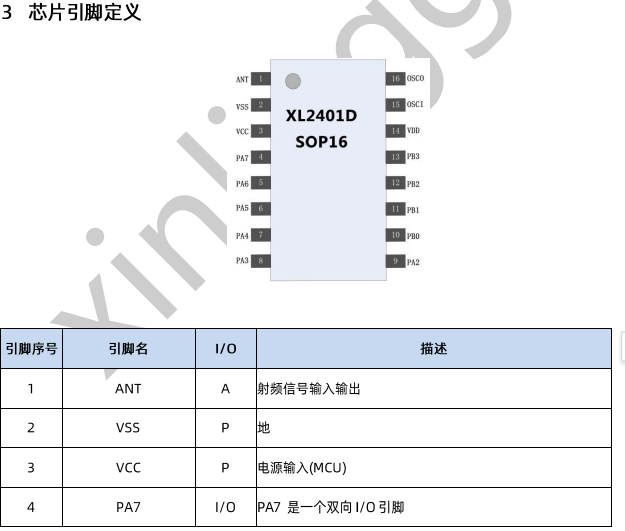
低成本高性能高性?xún)r(jià)比SOS無(wú)線(xiàn)收發(fā)芯片XL2401D
阿里巴巴Qwen大模型助力開(kāi)發(fā)低成本DeepSeek替代方案
Qwen大模型助力開(kāi)發(fā)低成本AI推理方案
低成本解決方案,RK3506的應(yīng)用場(chǎng)景分析!

百度Apollo開(kāi)放平臺(tái)10.0正式發(fā)布
使用TPS54308設(shè)計(jì)簡(jiǎn)單且低成本的Flybuck解決方案

具有TPS61085的低成本1W隔離電源解決方案
基于TPS61094的長(zhǎng)壽命、低成本智能電表解決方案
MS3010:?jiǎn)瓮ǖ赖蛪篋C電機(jī)驅(qū)動(dòng)與低成本的完美結(jié)合
使用TPS62933F設(shè)計(jì)簡(jiǎn)單且低成本的防蠅解決方案
基于氮化鎵的電源芯片U8722BAS具有更低成本效益

應(yīng)用COT與Flybuck技術(shù)的低成本小功率輔助電源解決方案
CC2340系統(tǒng)降低成本的方案剖析
英特爾攜手Aible打造創(chuàng)新解決方案,助力企業(yè)實(shí)現(xiàn)低成本智能化升級(jí)
高性能、低成本的無(wú)線(xiàn)模塊完美替代SX1278






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論