") 基于睿擎派輕松玩轉(zhuǎn)EtherCAT主站,實(shí)現(xiàn)電機(jī)精確控制
基于睿擎派輕松玩轉(zhuǎn)EtherCAT主站,實(shí)現(xiàn)電機(jī)精確控制

EtherCAT:工業(yè)控制的“神經(jīng)中樞”
在現(xiàn)代工業(yè)自動(dòng)化領(lǐng)域,設(shè)備實(shí)時(shí)協(xié)同成為智能制造的命脈。EtherCAT協(xié)議憑借其微秒級(jí)響應(yīng)、精準(zhǔn)時(shí)鐘同步、拓?fù)潇`活性三大核心優(yōu)勢,已成為高端運(yùn)動(dòng)控制領(lǐng)域的首選總線技術(shù)。本次實(shí)戰(zhàn)教程將基于睿擎派平臺(tái),演示實(shí)現(xiàn):
EtherCAT主站開發(fā)
CSP模式伺服電機(jī)精準(zhǔn)控制
遠(yuǎn)程IO流水燈聯(lián)動(dòng)
開啟工業(yè)實(shí)時(shí)通信開發(fā)新篇章!
EtherCAT控制電機(jī)示例
本示例通過創(chuàng)建一個(gè)EtherCAT Master實(shí)例,完成對(duì)EtherCAT伺服控制器和遠(yuǎn)程IO的初始化配置,使伺服電機(jī)控制器工作在CSP模式。在EtherCAT主站過程數(shù)據(jù)同步回調(diào)函數(shù)中,更新電機(jī)位置信息,實(shí)現(xiàn)電機(jī)運(yùn)行、停止、正轉(zhuǎn)、反轉(zhuǎn)等操作,并循環(huán)輸出電平給遠(yuǎn)程IO設(shè)備,讓IO設(shè)備輸出流水燈的效果。
硬件準(zhǔn)備
睿擎工業(yè)開發(fā)平臺(tái)支持板卡1塊(睿擎派RC3506)
EtherCAT伺服驅(qū)動(dòng)器一套(推薦力川LC10E-400W)
EtherCAT遠(yuǎn)程IO一套(可選,16DI 16DO)
串口調(diào)試器、jlink調(diào)試各一套
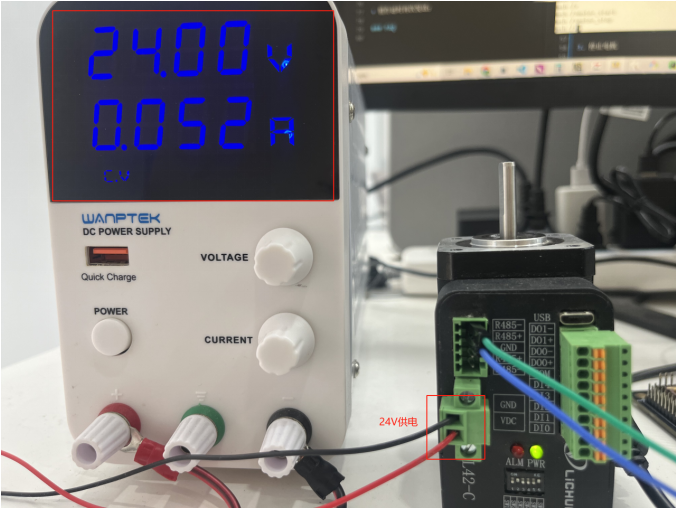
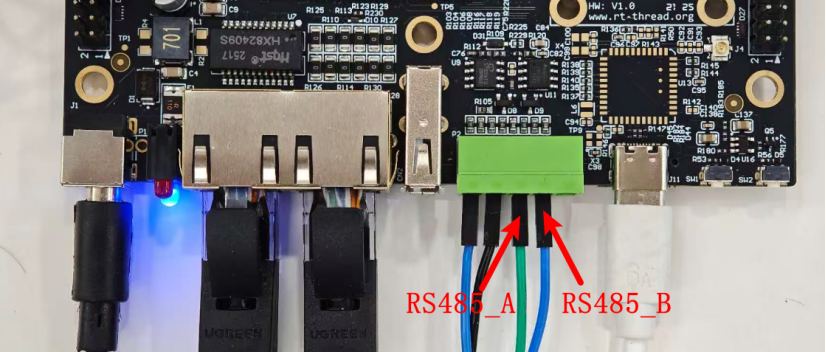
硬件連接
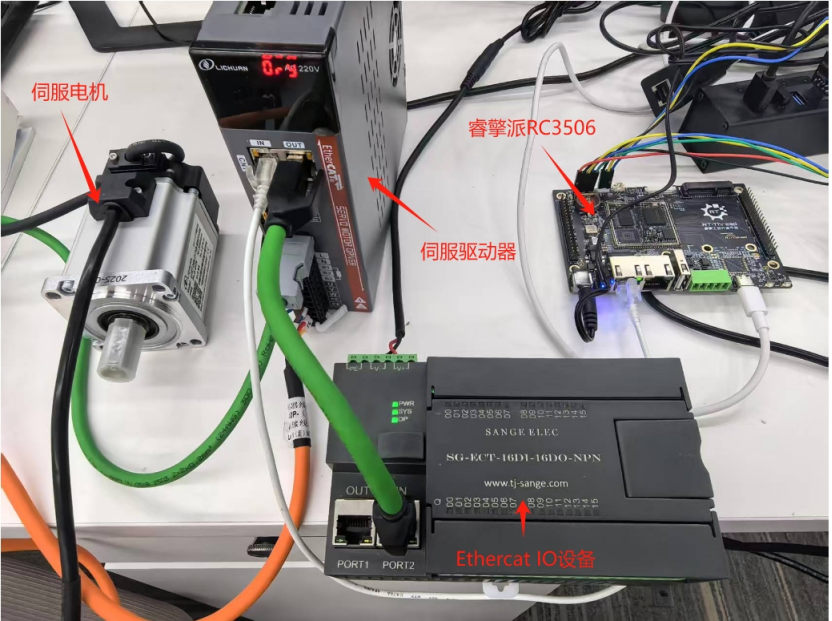
用網(wǎng)線將伺服控制器IN口與開發(fā)板ETH1網(wǎng)口連接,并將遠(yuǎn)程IO模塊的IN口連接到伺服控制器的OUT口。伺服電機(jī)的電源線和編碼器線分別接入電源口和CN3連接口。如圖所示:
創(chuàng)建示例工程
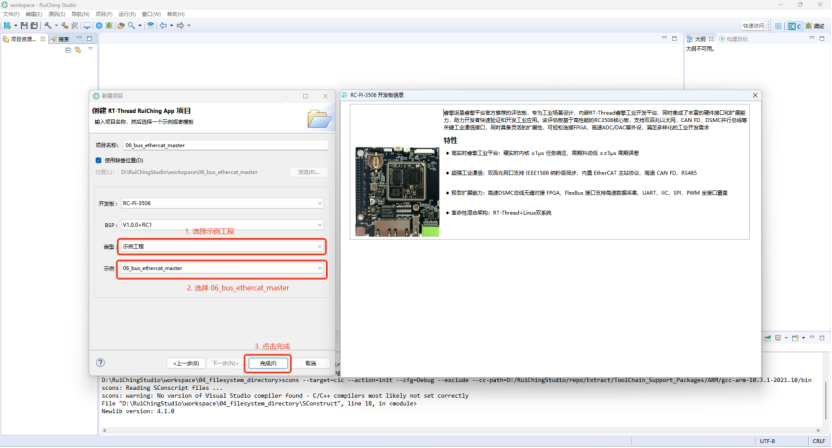
在RuiChing StudioIDE中,按以下步驟創(chuàng)建06_bus_ethercat_master
示例工程:
核心示例代碼
工程生成的ethercat_domain.c文件中,主要核心實(shí)現(xiàn)代碼如下:
周期設(shè)置
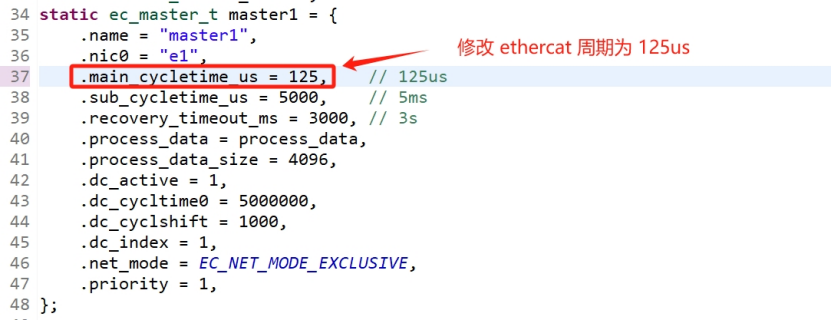
static ec_master_t master1是主站的結(jié)構(gòu)體信息,默認(rèn)配置1ms同步周期,如果從站支持1ms以下的同步周期,我們可以修改主站的同步周期,這里設(shè)置為125us。
EtherCAT主站的初始化配置回調(diào)
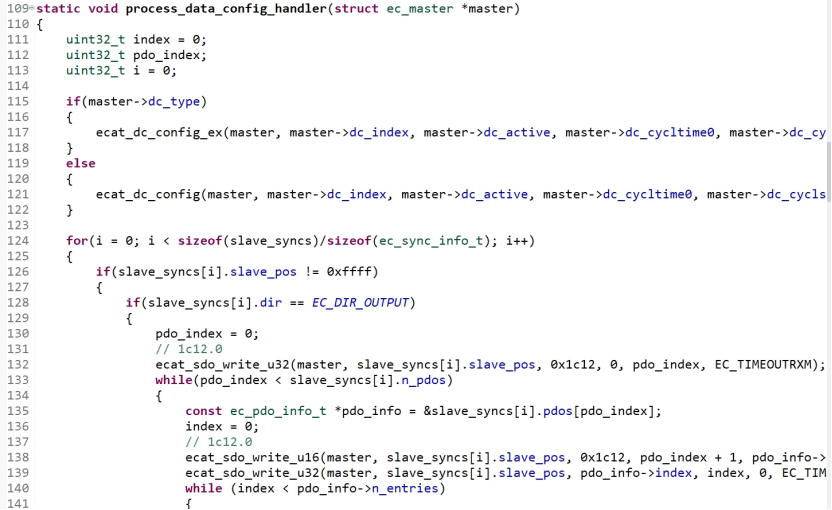
process_data_config_handler主要是EtherCAT主站的初始化配置回調(diào),在這個(gè)函數(shù)中,通常要對(duì)DC時(shí)鐘進(jìn)行配置以及PDO過程數(shù)據(jù)的映射配置,在本例子主要是對(duì)伺服電機(jī)的模式,目標(biāo)位置,目標(biāo)速度,當(dāng)前狀態(tài),當(dāng)前速度,當(dāng)前位置等PDO進(jìn)行映射配置。
EtherCAT主站運(yùn)行時(shí)周期循環(huán)過程數(shù)據(jù)更新回調(diào)
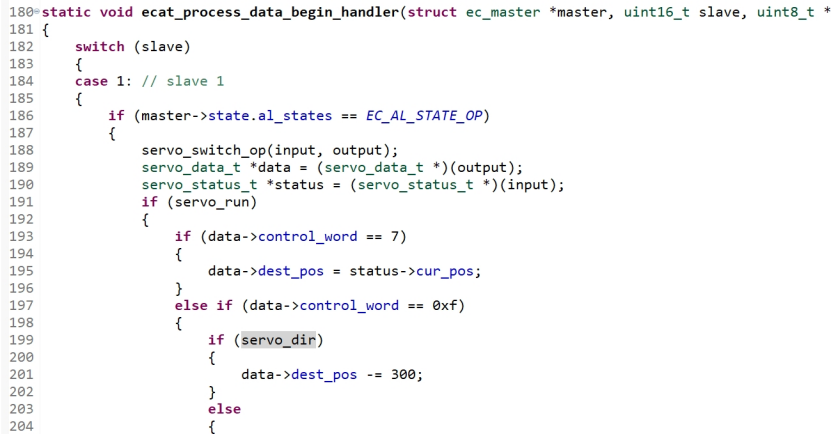
ecat_process_data_begin_handler主要是EtherCAT主站運(yùn)行時(shí)周期循環(huán)過程數(shù)據(jù)更新回調(diào),在這個(gè)函數(shù)中,主要進(jìn)行電機(jī)模式狀態(tài)切換處理以及對(duì)電機(jī)的位置進(jìn)行增量,實(shí)現(xiàn)正轉(zhuǎn)、反轉(zhuǎn)、停止等操作。
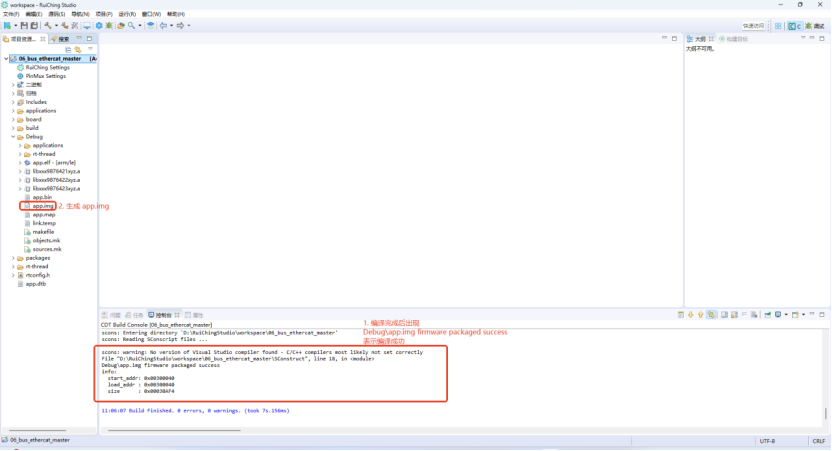
編譯示例工程
對(duì)06_bus_ethercat_master工程進(jìn)行編譯:
運(yùn)行程序
使用IDE調(diào)試并運(yùn)行程序后,在終端輸入motor_run運(yùn)行電機(jī),可以觀察到電機(jī)旋轉(zhuǎn)。EtherCAT示例運(yùn)行后,遠(yuǎn)程IO模塊輸出端會(huì)呈現(xiàn)流水燈的方式控制,電機(jī)會(huì)順時(shí)針旋轉(zhuǎn)。驅(qū)動(dòng)器風(fēng)扇會(huì)開啟,面板顯示88rn字符。
在終端輸入motor_stop可以停止電機(jī)。
在終端輸入motor_dir 0/1可以改變電機(jī)方向(注意:在電機(jī)停止?fàn)顟B(tài)下設(shè)置)。

總結(jié)
從伺服電機(jī)接線到精準(zhǔn)控制,睿擎平臺(tái)讓實(shí)現(xiàn)EtherCAT主站開發(fā)變得簡單高效。06_bus_ethercat_master示例工程只是一個(gè)起點(diǎn),基于此,您可以輕松擴(kuò)展:
多軸同步運(yùn)動(dòng)控制
分布式IO系統(tǒng)集成
實(shí)時(shí)性要求更高的精密制造場景
為何選擇睿擎平臺(tái)?
MCU開發(fā)體驗(yàn),MPU性能釋放:在MPU上開發(fā)達(dá)到和MCU一樣的開發(fā)體驗(yàn)。
開箱即用的工業(yè)協(xié)議棧:Modbus、CANopen、EtherCAT等主流工業(yè)協(xié)議深度集成,大幅縮短開發(fā)周期。
穩(wěn)定可靠的實(shí)時(shí)內(nèi)核:確保工業(yè)控制任務(wù)的實(shí)時(shí)性和確定性。
完善的開發(fā)工具鏈:RuiChing Studio IDE提供從編碼、編譯、調(diào)試到部署的一站式體驗(yàn)。
活躍的社區(qū)與豐富資源:遇到問題?海量教程、文檔和社區(qū)開發(fā)者為你提供支持。
-
電機(jī)控制
+關(guān)注
關(guān)注
3574文章
1977瀏覽量
272231 -
主站
+關(guān)注
關(guān)注
0文章
45瀏覽量
8039 -
ethercat
+關(guān)注
關(guān)注
19文章
1140瀏覽量
40179
發(fā)布評(píng)論請(qǐng)先 登錄
基于睿擎派輕松玩轉(zhuǎn)CANopen電機(jī)控制
基于睿擎派輕松玩轉(zhuǎn)Modbus工業(yè)通信
基于全志T507-H的Igh EtherCAT主站案例分享
基于全志T507-H的Linux-RT + Igh EtherCAT主站案例分享
基于米爾安路飛龍派FPGA FPSoC+移植SOEM實(shí)現(xiàn)EtherCAT主站控制功能
基于賽靈思FPGA的EtherCAT主站運(yùn)動(dòng)控制
IGH_Master主站配置驅(qū)動(dòng)伺服電機(jī)和變頻器相關(guān)資料推薦
找開發(fā)EtherCat主站的設(shè)計(jì)人員
開源!ZYNQ IgH EtherCAT主站方案分享
EtherCAT 主站方案橫向?qū)Ρ?/a>
虹科干貨 | 簡單幾步教您使用工業(yè)樹莓派結(jié)合CODESYS配置EtherCAT主站

電機(jī)控制領(lǐng)域如何實(shí)現(xiàn)CANopen設(shè)備接入EtherCAT主站控制器

如何同步運(yùn)行?--基于EtherCAT的柔性電機(jī)驅(qū)動(dòng)系統(tǒng)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論