") 無人車為什么需要高精度的定位系統(tǒng)?
無人車為什么需要高精度的定位系統(tǒng)?
按定位技術原理不同可分為三類。第一類,基于信號的定位,代表就是GNSS定位,即全球導航衛(wèi)星系統(tǒng);第二類,航跡推算,依靠IMU等,根據(jù)上一時刻的位置和方位推斷現(xiàn)在的位置和方位;第三類是環(huán)境特征匹配,基于LiDAR的定位,用觀測到的特征和數(shù)據(jù)庫中的特征和存儲的特征進行匹配,得到現(xiàn)在車的位置和姿態(tài)。
無人車為什么需要高精度的定位系統(tǒng)?
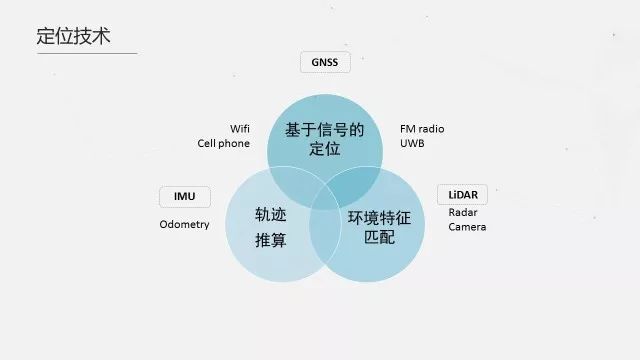
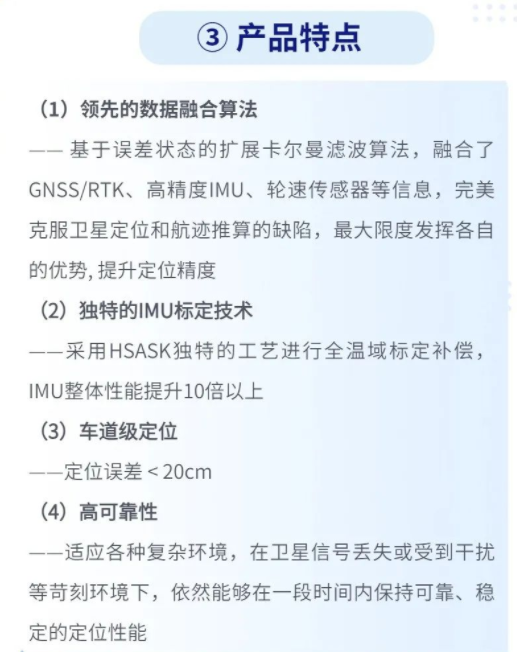
對于無人駕駛而言,位置和姿態(tài)用于路徑規(guī)劃和車輛控制,高精度和高魯棒性的定位系統(tǒng)至關重要。我們先來了解一下不同的定位類型,以百度Apollo多傳感器融合定位為例,其包含三類定位技術:
智能駕駛的三類定位定姿技術
按定位技術原理不同可分為三類。第一類,基于信號的定位,代表就是GNSS定位,即全球導航衛(wèi)星系統(tǒng);第二類,航跡推算,依靠IMU等,根據(jù)上一時刻的位置和方位推斷現(xiàn)在的位置和方位;第三類是環(huán)境特征匹配,基于LiDAR的定位,用觀測到的特征和數(shù)據(jù)庫中的特征和存儲的特征進行匹配,得到現(xiàn)在車的位置和姿態(tài)。
三類定位技術各有優(yōu)劣,第一類GNSS定位,通過GNSS信號接收完成定位,優(yōu)點是全球、全天候、全天時高精度厘米級定位,缺點是依賴可視衛(wèi)星顆數(shù)、易受電磁環(huán)境干擾、多路徑效應等影響;第二類慣性定位,利用慣性測量單元(陀螺儀和加速度計)測量得到載體相對于慣性空間角運動和線運動參數(shù),并通過慣性導航解算得到載體速度、位置、姿態(tài),優(yōu)點是輸出頻率非常高(大于100Hz),短時精度高,缺點是誤差隨著時間累積,且高性能IMU價格昂貴;第三類點云定位,激光點云定位需要預先制作地圖,然后用實時點云和地圖進行匹配,來計算激光雷達的位置和姿態(tài),再通過激光雷達與IMU之間的外參,得到IMU的位置和姿態(tài),優(yōu)點是在沒有GNSS情況下也可以工作,魯棒性比較好,缺點是需要預先制作地圖同時要定期更新地圖(環(huán)境會發(fā)生變化),雨雪天氣也會受到影響(折射較多,回收點云數(shù)據(jù)變少)。
百度Apollo2.0多傳感器融合的定位系統(tǒng)

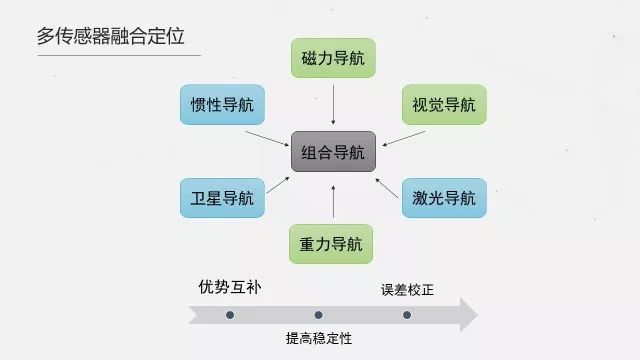
基于以上三種定位技術,百度提出了多傳感器融合的定位系統(tǒng),既做到優(yōu)勢互補,也提高了穩(wěn)定性并增強了定位精度。
(圖片來源于網絡)
上圖為百度無人車,其GNSS定位和慣性測量單元都由NovAtel提供, IMU 為NovAtel IMU-IGM-A1 ,GNSS接收機為NovAtel ProPak6,構成 NovAtel SPAN-IGM-A1分體式組合導航系統(tǒng),能夠以最高 200Hz 的頻率,輸出實時的高精度、高可靠的三維位置、速度、姿態(tài)信息,作為Apollo推薦的參考硬件單元。
NovAtel SPAN組合導航系統(tǒng)有三大優(yōu)勢技術,非常適合智能駕駛應用。
SPAN? 技術
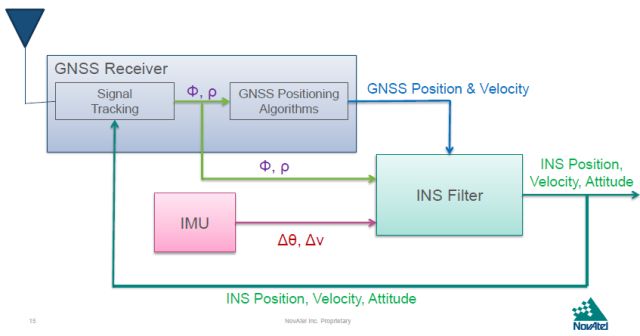
SPAN? 技術是 NovAtel 公司推出的高精度 GNSS 和 IMU 深耦合組合導航技術,通過 GNSS 衛(wèi)星導航技術和 INS 慣性導航技術的相互補充,既能保證在小于 4 顆衛(wèi)星信號時,利用 INS 數(shù)據(jù)持續(xù)地得到高精度的位置、速度和姿態(tài)信息,也能保證在 INS 系統(tǒng)誤差變大的情況下,利用 GNSS 數(shù)據(jù)對 INS 系統(tǒng)進行修正,以持續(xù)輸出高精度的位置信息和姿態(tài)信息。
Interference Toolkit(ITK)
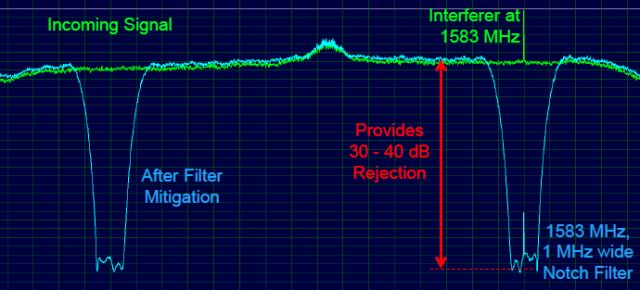
Interference Toolkit(ITK)是NovAtel OEM7新推出的干擾抑制技術,當下復雜的電磁環(huán)境或其他電子設備易對GNSS信號產生干擾,ITK技術利用監(jiān)視器和濾波算法,可有效量化和剔除干擾信號,避免導航解算性能受到影響。
NovAtel PwrPak7D-E1一體式
MEMS 組合導航系統(tǒng)
NovAtel PwrPak7D-E1一體式 MEMS 組合導航系統(tǒng),采用SPAN深耦合組合導航算法,支持SPAN Land Vehicle陸地車輛技術,支持ITK干擾抑制技術,555個GNSS信號跟蹤通道,支持GPS、Glonass、北斗、Gaileo全系統(tǒng)多頻解算,支持RTK和Terrastar星站差分技術,內置WiFi和16GB存儲,支持雙天線和輪速傳感器功能,具有豐富的通訊接口,串口、USB、CAN、以太網等,易于客戶安裝集成。
SPAN Land Vehicle陸地車輛技術
SPAN Land Vehicle陸地車輛技術是NovAtel OEM7代產品在SPAN技術基礎上,利用車輛運動模型和專利天線相位檢測技術,針對智能駕駛等地面輪式車輛應用中低速、城市峽谷、長期失鎖等場景進行了大量優(yōu)化,顯著提升導航性能,滿足高精度定位要求的同時,通過算法提升來降低系統(tǒng)對IMU器件精度的要求,適合智能駕駛降成本的發(fā)展趨勢。
-
定位系統(tǒng)
+關注
關注
10文章
613瀏覽量
36823 -
自動駕駛
+關注
關注
788文章
14199瀏覽量
169532
原文標題:自動駕駛技術之——高精度定位
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
智慧分揀高精度定位管理系統(tǒng)
FPGA電源需要高精度的理由
什么是高精度地圖
SKYLAB詳解高精度定位模塊的五大應用領域
為什么4S店需要高精度定位系統(tǒng)
FPGA電源需要高精度的理由
UWB高精度定位系統(tǒng)在各領域中的應用淺析
室內高精度人員定位系統(tǒng)是什么?
室外高精度人員定位系統(tǒng)是什么?
車規(guī)級高精度組合導航定位系統(tǒng)——INS-811
高精度GNSS定位定向模組M20D實現(xiàn)無人配送車導航定位的原理

Aigtek:為什么需要高精度電流源

物聯(lián)網系統(tǒng)中高精度RTK定位方案的實現(xiàn)_高精度定位模塊

高精度定位新突破:基于ST T5 GNSS芯片高精度定位系統(tǒng)在非車規(guī)應用解決方案





 工商網監(jiān)
工商網監(jiān)
評論