 用樹莓派打造無人機,你需注意的事項!
用樹莓派打造無人機,你需注意的事項!

對于像我這樣的普通愛好者而言,能接觸到無人機是令人興奮的。盡管我可以直接購買現成的無人機,但身為DIY愛好者,我更感興趣的是編寫獨特的用例程序,或對自建的無人機進行升級。因此,我的第一個問題是:我能否將樹莓派裝入無人機?
使用樹莓派打造無人機是可行的。樹莓派充當無人機的“大腦”,將飛行控制器的數據與傳感器進行集成。為無人機添加樹莓派,可使其適應不同任務需求。
市面上的樹莓派無人機指南往往直接深入詳細步驟,卻未解釋背后的原因。而我則希望分享一些宏觀思路,這樣無論你是購買套件還是完全自己動手,都能帶著這些知識翱翔天際。
目錄
概述:為何要打造樹莓派無人機?
樹莓派無人機硬件部件
樹莓派無人機軟件
最佳樹莓派無人機套件
借助引導教程更進一步
樹莓派購買可以直接聯系我們,其它套件購買請在文末原文章出處進行查詢。
概述:為何要打造樹莓派無人機?

如果你只是想駕駛無人機,可以直接從大疆等品牌購買現成型號。但如果你對打造自己的無人機、將其定制成你想要的任何功能,并享受學習過程中的樂趣感興趣,那么打造樹莓派無人機將是一個絕佳的挑戰。
你可以體驗成為先驅者的感覺,就像萊特兄弟一樣,運用你的聰明才智實現飛行。這是一件美妙的事情。
樹莓派無人機的優勢
無人機即使沒有樹莓派也能飛行,那么加入樹莓派有什么好處呢?
為無人機添加樹莓派,你可以:
實時傳輸視頻。
捕獲GPS坐標或紅外圖像等數據。
連接并控制各種傳感器、USB設備、攝像頭或其他硬件。
編程實現自主飛行,如連接激光雷達模塊以檢測和避開障礙物。
在飛行過程中使用普通攝像頭或更強大的樹莓派AI攝像頭對真實物體應用計算機視覺。
協調無人機群共同飛行并執行任務。
添加樹莓派后,你的無人機將能做的遠不止飛行。
購買具有特殊功能的無人機可能價格昂貴,但你可以根據自己的需求定制無人機。
這些知識將教會你如何在無人機出現問題時以更低的成本進行修復,并且當你想改變無人機的用途時,可以重新配置其功能。
打造無人機時需做出的重要決策
在購買部件之前,先確定你想要打造什么樣的無人機。以下是幾個需要自問的關鍵問題。
我希望我的無人機執行什么任務?
沒有一種設計適用于所有場景。不同的無人機是為不同的功能而專門設計的。你的無人機是用于記錄第一人稱視角(FPV)視頻、參加競賽,還是執行搜索與救援任務?這個決定將影響你做出的所有其他選擇。
我將采用哪種無人機設計?
四軸飛行器設計因其構建簡單且易于控制而廣受歡迎。但還有其他選擇,如直升機或重型八軸飛行器。
你需要多大的飛行范圍?
顯然,能在空中停留的時間越長越好!但在現實世界中,你需要權衡:你必須平衡無人機的功能、重量、電池壽命和構建成本。
樹莓派無人機硬件部件
現在,你已經確定了目標,接下來我們來看看需要購買哪些硬件。在本節中,我將介紹關鍵部件及其在我們構建中的用途。
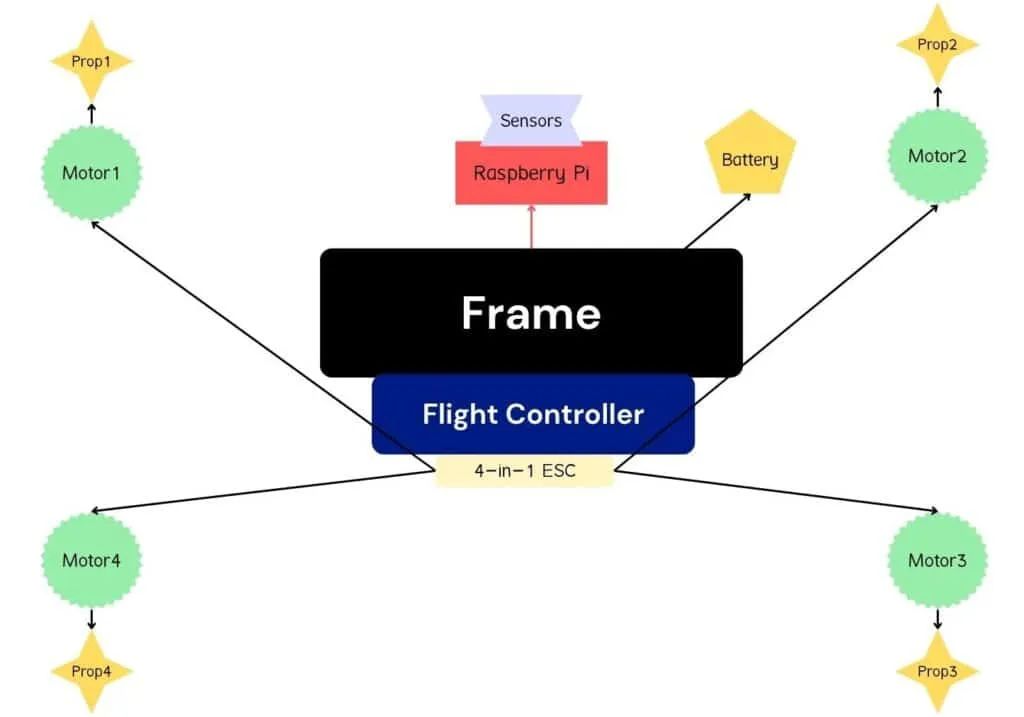
下表總結了樹莓派無人機的常見硬件組件:
| 組件 | 功能 |
| 機架 | 無人機的物理機身 |
| 樹莓派 | 將所有硬件和軟件組件連接在一起的“大腦” |
| 飛行控制器 | 控制電機、加速和平衡 |
| 電機 | 向葉片提供旋轉動力 |
| 電子調速器 | 調節電機速度和方向 |
| 螺旋槳 | 產生升力的旋轉葉片 |
| 電池 | 能量儲備 |
| 配電板 | 為不同部件供電 |
| 發射器 | 遙控方式 |
| 傳感器 | 執行專門任務的模塊,如攝像頭或紅外傳感器 |
我為每個部件提供了以下說明。它們按你可能想要一起考慮的類別進行了分組。
機身部件
機架和樹莓派構成了無人機的機身和“大腦”。它們決定了你的無人機將執行的具體任務。

機架——在合理范圍內,你希望機架盡可能輕。
購買預制的機架是最簡單的。以下是一個適用于全能型四軸飛行器的經濟實惠的機架:F450無人機四軸飛行器機架套件。或者,如果你想要一個速度快的飛行器,這里有一個專為四軸飛行器競賽設計的碳纖維機架:競速無人機碳纖維四軸飛行器機架套件。
你能在家用3D打印機打印機架嗎?當然可以。但我認為這是專業級別的操作,除非你想測試空氣動力學和適配性,否則初學者不應嘗試。
樹莓派
樹莓派是讓你的無人機所有不同部件協同工作的“大腦”。
你可能會認為樹莓派5總是最佳選擇,因為就撰寫本文時而言,它是最強大的板子。但它也消耗最多的電力,且成本最高。
一些構建者使用Pi 4或Pi 3B+作為在功耗和成本之間的妥協。
然而,如果我們談論的是超輕型無人機,可以考慮樹莓派Zero 2 W。Zero足夠處理一些四軸飛行器設計,且重量和體積都小得多。
下表總結了選擇樹莓派時需要考慮的不同因素:
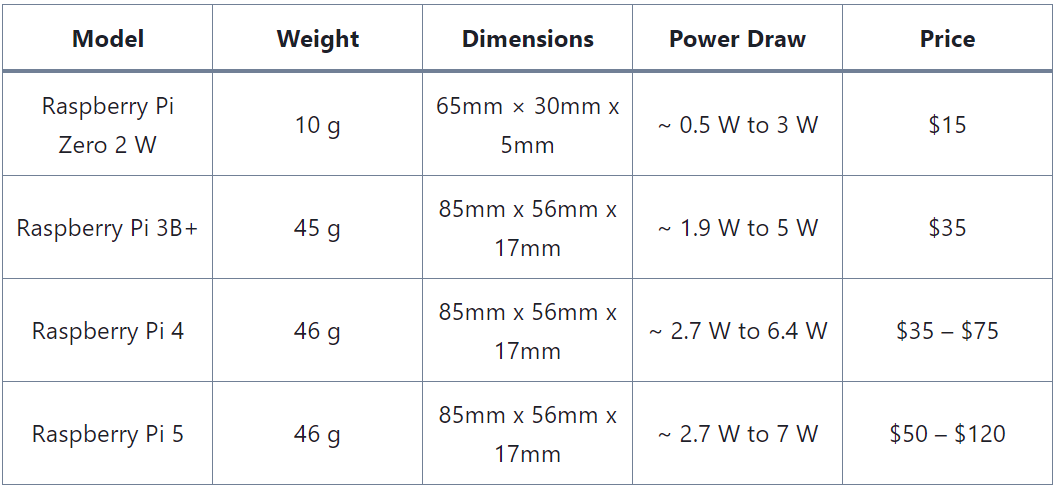
請記住,如果你的目標涉及高內存使用,你將必須選擇樹莓派4或Pi 5,以獲得4GB、8GB或16GB的RAM。
要查看更詳細的規格,請查看我們的樹莓派對比表。
飛行部件
無人機的飛行能力將直接取決于飛行控制器、電機、電子調速器和螺旋槳。

飛行控制器——飛行控制器(FC)控制電機、螺旋槳和與操縱相關的任何部件。一些流行的多功能FC包括Pixhawk PX4或Navio2。這些FC通常包括GPS或陀螺儀以處理自動駕駛。
但也有一些更實惠的飛行控制器,沒有所有花哨的功能,如SpeedyBee F405或Matek F405。
你可能會問:為什么我不能使用我的樹莓派作為FC?從技術上講,你可以,也有這樣的項目存在。但這是一個巨大的挑戰,最好等你成為該領域的專家后再嘗試。
對于大多數愛好者來說,使用專用的飛行控制器來負責飛行,而讓樹莓派處理傳感、通信或數據處理等功能會更好。

電機——電機是無人機的發動機。你需要的電機數量將取決于你選擇的設計。對于典型的四軸飛行器,你需要4個電機,通常選擇無刷直流電機(如這個)。

電子調速器(ESC)——電子調速器(ESC)接收來自FC的信號,并將其轉換為可變的電機速度。你需要與電機數量相同的ESC(例如,四軸飛行器將有4個ESC對應4個電機)。
如今,許多構建方案都通過使用4合1 ESC來簡化操作,它將所有ESC集成在一塊板上,并集成了配電解決方案。我認為對于初學者來說,4合1 ESC將是首選方案。
螺旋槳——電機旋轉螺旋槳,使你的無人機起飛。四軸飛行器的常見設計是安裝4對螺旋槳。
除了決定使用多少螺旋槳外,你還應該決定想要多大尺寸的葉片。對于初學者來說,5英寸葉片是一個平衡的選擇,但螺旋槳也有7英寸葉片的長距離無人機專用款,或小至2英寸葉片的微型構建款。
單獨購買每個部件可以讓你選擇更高質量的組件,但這需要研究且成本更高。如果你想要一個更簡單、更具成本效益的方案,考慮購買電機、ESC和螺旋槳的套裝。至少你知道它們已經經過測試可以一起工作。
動力部件
飛行需要能量,因此你需要為電機、樹莓派和其他部件供電。一個好的電池是關鍵,它將由配電板進行管理。

電池——電池決定了你有多少能量用于飛行和執行視頻錄制等任務。但電池越大,它就越重且越貴,因此這里有一個重要的權衡。
一個流行的選擇是使用可充電鋰聚合物(LiPo)電池,如這種1550毫安時的電池。你可能還需要一個LiPo充電器來充電。
你能在空中停留多久取決于你構建的其他部件和你的預期用途。如果你自己動手,這里有很多選擇,這里有一篇關于6S與4S LiPo電池區別的很好的文章。
配電板——配電板(PDB)管理發送到不同部件的適當電量。話雖如此,你可能不需要一個獨立的PDB。
注意:一些無人機設計不再需要單獨的PDB。許多流行的構建方案使用已經集成了此功能的4合1 ESC。
然而,如果你正在構建像八軸飛行器這樣的東西,其中有兩個單獨的4合1 ESC,你將需要添加一個PDB來協調它們之間的電力輸出。
遙控與功能部件
最后,你如何從地面告訴你的無人機該做什么?你將使用發射器通過Wi-Fi或RC向無人機發送信號。

發射器——這是你將用來控制無人機的手持遙控器。你將希望能夠與你的FC通信以處理飛行,并與你的樹莓派通信以執行任務。
這里有幾個選擇。你可以使用:
兩者都用Wi-Fi。
兩者都用無線電(RC)。
飛行控制器用RC + 樹莓派用Wi-Fi。
Wi-Fi更方便,因為樹莓派已經支持Wi-Fi,你可以使用智能手機上的應用程序作為發射器。盡管Wi-Fi更容易使用,但請準備好面對有限范圍和更高延遲的挑戰。
使用無線電控制(RC)將為你提供卓越的范圍和可靠性。缺點是設置起來更復雜,且你需要購買一個RC發射器。你可以從BETAFPV購買一個簡單的,或像這個RadioMaster一樣更復雜的。
傳感器與其他模塊——你想添加到無人機上的額外傳感器完全取決于你想讓你的無人機執行什么任務。例如,你可以安裝樹莓派攝像頭來記錄鳥瞰圖。或者,你可能想讓你的無人機自主飛行,在這種情況下,你可能會連接一個GPS HAT。
樹莓派無人機軟件
好了,我們已經介紹了打造樹莓派無人機所需的硬件,但軟件呢?以下是一個簡短的清單,幫助你入門。
樹莓派操作系統:我推薦樹莓派OS Lite,因為它穩定,且由于沒有圖形用戶界面(GUI)而需要較少的RAM,并且有很多教程可用。如果你是一位經驗豐富的無人機操作員,考慮安裝帶有ROS(機器人操作系統)的Ubuntu。
FC固件:與本清單上的其他軟件不同,這不是為樹莓派準備的,而是需要刷入飛行控制器的。根據你的FC選擇,可能包括PX4、ArduPilot或MultiWii。
樹莓派與FC通信——DroneKit:你的樹莓派需要與飛行控制器交換數據以將所有部件連接在一起。Python庫DroneKit很擅長這項工作,并允許你編寫自定義自動化。
任務調度器——crontab:當你啟動無人機時,你希望樹莓派自動啟動它需要的程序。幸運的是,大多數Linux系統都包括crontab來調度任務。
以上涵蓋了基本內容。以下軟件包是可選的,你可能還需要其他軟件包,具體取決于你還想讓你的無人機做什么。
視頻流——GStreamer:如果你想要一個FPV無人機,GStreamer框架將允許你將攝像頭看到的畫面流式傳輸到你的智能設備上。
圖像識別——OpenCV:如果你想做圖像處理,查看我們的OpenCV安裝指南。
Wi-Fi熱點——hostapd:這個軟件包僅在你想要使用Wi-Fi控制無人機時才需要。你將使用hostapd將你的樹莓派變成一個熱點,然后從你的智能手機或平板電腦上連接。
最佳樹莓派無人機套件

研究、購買硬件和安裝軟件是一項繁重的工作。我認為這就是樂趣所在:從頭開始購買部件并在學習過程中進行構建。
但毫無疑問:打造DIY樹莓派無人機是具有挑戰性的。如果你覺得這太有壓力或風險太大,我建議你購買一個無人機套件。
使用零售無人機套件,所有部件都已經被確認可以構建出一個可工作的無人機。
以下是我發現的一些不同價格范圍的套件,注:具體內容,請在原文查看。
經濟型套件
HolyBro S500 V2無人機套件——你需要添加一個FC和電池,并自己編程所有內容
HolyBro X500 V2套件——附帶一個良好的硬件基礎。你必須添加一個FC并安裝你自己的軟件。
HAWK'S WORK F450無人機套件C——你將需要添加一些部件。我喜歡他們銷售這個套件的不同級別(A到E),所以你可以根據需要擴大或縮小規模以定制你的構建。
中檔套件
HAWK'S WORK F450無人機套件A——包括一個不錯的Pixhawk飛行控制器、Pi安裝孔和一個對新手友好的指南。
Duckiedrone套件——附帶所有部件和說明,你可以從頭開始組裝所有東西。
Drone Dojo Pi Zero無人機套件——附帶完整的部件、說明和為初學者提供的構建支持。
HolyBro X500 V2無人機PX4開發套件——附帶幾乎所有東西和一些額外的傳感器。適用于有一定進階水平的用戶。
高端套件
Drone Dojo樹莓派Hawk無人機套件——一個更強大的無人機,包括40多個部件、說明和為初學者提供的構建支持。
Holybro X650無人機開發套件——一個龐大的無人機,附帶所有東西和額外的傳感器。適用于有一定進階水平的用戶。
借助引導教程更進一步
現在,你已經有了所有部件,是時候構建你的無人機了。本文并非完整的教程,所以讓我通過鏈接一些指南來為你指明正確的方向。
大致步驟
以下是構建樹莓派無人機所涉及的大致步驟:
1.組裝無人機機架并連接部件。
2.連接ESC和/或配電板以控制電力。
3.配置飛行控制器。
4.將傳感器連接到樹莓派。
5.在樹莓派和FC上安裝軟件和庫。
6.通過Wi-Fi或RC將發射器連接到無人機。
7.測試飛行并進行校準。
-
硬件
+關注
關注
11文章
3483瀏覽量
67475 -
無人機
+關注
關注
231文章
10834瀏覽量
186704 -
樹莓派
+關注
關注
121文章
2001瀏覽量
107421
發布評論請先 登錄
小米無人機要PK大疆無人機,你看好嗎?
The Drone Pi :用樹莓派做無人機(一)——材料準備
用樹莓派做無人機(二)——工作原理和框架構造
都在談論無人機:教你10種利用無人機賺錢的方法
無人機電池使用前后注意事項有哪些?
無人機技術解答
玩無人機需注意的五個細節
武漢無人機無人機比武演練,普宙O2當裁判
無人機類型之植保無人機,帶你了解什么是植保無人機?
植保無人機的飛行注意事項

使用 Betaflight 和樹莓派實現 FPV 無人機自主飛行!






 工商網監
工商網監
評論