") 康謀分享 | 物理級(jí)傳感器仿真:破解自動(dòng)駕駛長(zhǎng)尾場(chǎng)景驗(yàn)證難題
康謀分享 | 物理級(jí)傳感器仿真:破解自動(dòng)駕駛長(zhǎng)尾場(chǎng)景驗(yàn)證難題

自動(dòng)駕駛研發(fā)面臨"長(zhǎng)尾效應(yīng)"的終極挑戰(zhàn):海量邊緣場(chǎng)景需要近乎無(wú)限的測(cè)試?yán)锍獭?strong>仿真測(cè)試雖已成為行業(yè)共識(shí),但其真實(shí)度仍存根本性質(zhì)疑——當(dāng)多數(shù)平臺(tái)仍停留在視覺(jué)逼真層面時(shí),感知算法的低階數(shù)據(jù)處理和魯棒性測(cè)試已觸及驗(yàn)證天花板。
其實(shí),真正的物理級(jí)仿真必須從數(shù)據(jù)源頭出發(fā):從光子穿透鏡頭到電信號(hào)轉(zhuǎn)換,從激光能量分布到多回波散射,每一個(gè)物理環(huán)節(jié)都會(huì)直接影響算法在現(xiàn)實(shí)世界中的表現(xiàn)。
基于此,本文將深入解析攝像頭與激光雷達(dá)的物理建模機(jī)制,并解讀2025新興標(biāo)準(zhǔn)ASAM OpenMATERIAL 3D,從而探討如何為高可信度仿真提供關(guān)鍵基礎(chǔ)的問(wèn)題!
01 鏡頭模型的光學(xué)物理建模
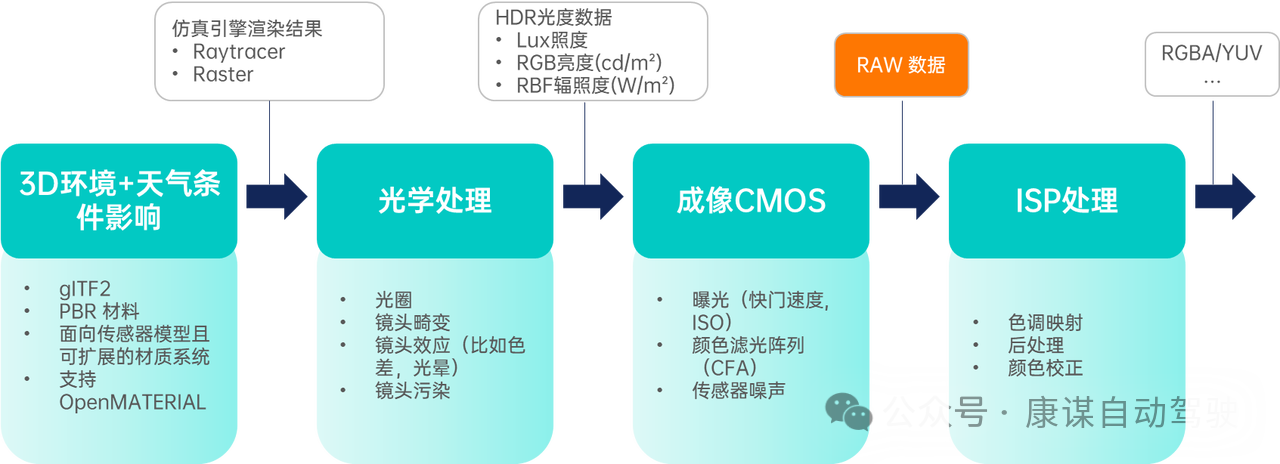
傳統(tǒng)的攝像頭仿真,其終點(diǎn)往往是一張“干凈”的RGB圖像。這對(duì)于高級(jí)規(guī)劃控制算法或許足夠,但對(duì)于依賴圖像原始信息的感知算法開(kāi)發(fā)者而言,這無(wú)異于在精裝修的樣板間里測(cè)試建筑結(jié)構(gòu)。他們真正需要的,是模擬從光子穿過(guò)復(fù)雜鏡頭組,到CMOS傳感器輸出原始電信號(hào)的全過(guò)程。
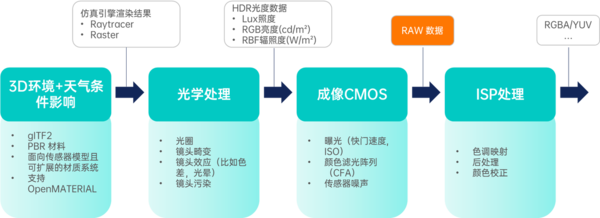
1、畸變?cè)砼c參數(shù)化建模
現(xiàn)代車載廣角/魚(yú)眼鏡頭的非線性失真很難靠針孔模型捕捉。這種畸變始于鏡片的設(shè)計(jì):曲率、鏡間距離、材料折射率、涂層結(jié)構(gòu)等都會(huì)造成光線偏折與映射失真。
高保真建模路徑:
(1)畸變函數(shù):(如 fisheye、Mei、F?Theta、EUCM 等)源自具體鏡頭標(biāo)定,能描述像素偏移;
(2)多項(xiàng)式系數(shù)模型:捕捉畸變隨徑向變化的非線性,用于語(yǔ)言和超廣角鏡頭;
(3)LUT(查找表)方式:直接復(fù)刻真實(shí)標(biāo)定點(diǎn)映射,將任意復(fù)雜畸變精準(zhǔn)還原。
技術(shù)意義:光學(xué)還原誤差的減少將會(huì)直接提升后續(xù)曝光、噪聲疊加的物理建模可信度,還能從光學(xué)角度模擬不同的鏡頭效應(yīng)。
02 CMOS傳感器光電仿真
1、光電轉(zhuǎn)換與噪聲建模
相機(jī) RAW輸出用戶關(guān)注的是兩個(gè)關(guān)鍵過(guò)程:
(1)Quantum Efficiency(QE):光子轉(zhuǎn)化為電子的效率;
(2)Conversion Gain:每個(gè)電子轉(zhuǎn)換成輸出電壓的增益。
從輻射曝光到電壓的轉(zhuǎn)換公式可表示為:
photon_energy=(h?c) / λ
其中:
(1)h:普朗克常數(shù);
(2)c:光速m/s;
(3)λ:RGB各通道的波長(zhǎng),以m為單位。
radiant_exposure_to_voltage=(pixel_size2)/ photon_energy x quantum_efficiency x conversion_gain
其中:
(1)radiant_exposure_to_voltage:表示將輻照度(光能量密度)轉(zhuǎn)換為電壓信號(hào)的轉(zhuǎn)換因子,單位通常是伏特每單位輻照度;
(2)pixel_size:像素的邊長(zhǎng),單位通常是米(m)。這里用平方表示像素面積,即 pixel_size2pixel_size2,表示單個(gè)像素接收光子的有效面積;
(3)photon_energy:單個(gè)光子的能量,單位是焦耳(J)。由公式 h?cλλh?c 計(jì)算,其中 hh 是普朗克常數(shù),cc 是光速,λλ 是光的波長(zhǎng);
(4)quantum_efficiency:量子效率,表示入射光子被探測(cè)器轉(zhuǎn)換為電子的效率,通常是一個(gè)小于1的無(wú)量綱數(shù)。
(5)conversion_gain:轉(zhuǎn)換增益,表示電子信號(hào)轉(zhuǎn)換為電壓信號(hào)的增益,單位通常是伏特/電子(V/electron);
同時(shí)考慮:
(1)Shot Noise(光子噪聲):自然量子過(guò)程下的統(tǒng)計(jì)波動(dòng);
(2)Read Noise(讀出噪聲):來(lái)自電路本身的不確定性;
(3)ADC 量化誤差:由電壓擺幅與位數(shù)決定。

8bit CFA Bayer(預(yù)處理)
2、非線性響應(yīng)與增益控制
模擬域增益與數(shù)字域增益、PWL 非線性函數(shù)可讓模型真實(shí)復(fù)現(xiàn)CMOS 增益壓縮、飽和與拉伸特性。
價(jià)值亮點(diǎn):算法開(kāi)發(fā)者不再用“擬真濾鏡”,而是直接在復(fù)刻硬件真實(shí)響應(yīng)的“數(shù)據(jù)源”上驗(yàn)證性能,真實(shí)評(píng)估弱光、過(guò)曝下的魯棒性。
03 LiDAR 建模:高斯射線與物理衰減
1、光束結(jié)構(gòu)與多回波
真實(shí)LiDAR發(fā)出的激光是包含能量分布的高斯光束,而非理想“無(wú)寬度射線”。通過(guò)參數(shù)化:
(1)Beam divergence控制光束發(fā)散角;
(2)Beam sampling density決定光斑內(nèi)采樣次數(shù);
(3)高斯能量分布可模擬光斑中心與邊緣的能量差異;
(4)Secondary Returns模擬光束穿透薄物體或發(fā)生多次反射后的回波情形。
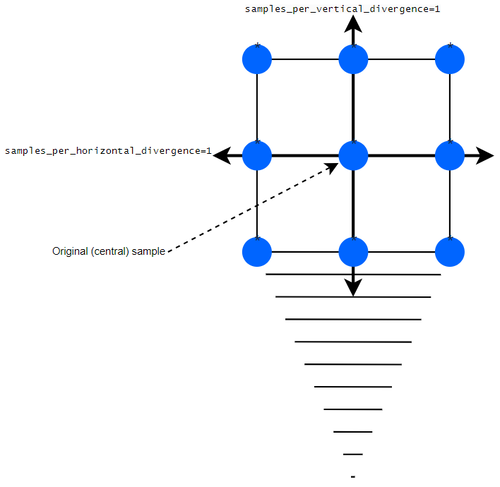
在發(fā)射角范圍內(nèi)進(jìn)行指定數(shù)量的采樣
核心優(yōu)勢(shì):這種建模方式,使得仿真器能夠更精確地模擬物體邊緣的探測(cè)效果、小目標(biāo)的漏檢概率,以及由單次發(fā)射脈沖擊中不同距離物體而產(chǎn)生的多重回波。這對(duì)于依賴點(diǎn)云密度和回波信息的聚類、分割算法的驗(yàn)證,具有不可替代的價(jià)值。
2、大氣與天氣中的物理衰減
激光在雨霧雪中傳播時(shí)會(huì)經(jīng)歷:
(1)大氣消光(Extinction):受可見(jiàn)度、Mie 散射、水滴大小和雷雨強(qiáng)度控制;
(2)多模態(tài)散射:粒徑分布影響波長(zhǎng)選擇,對(duì) 905nm 或 1550nm 波段影響不同;
(3)點(diǎn)云強(qiáng)度、范圍測(cè)量誤差:由上述物理機(jī)制驅(qū)動(dòng),而非隨機(jī)丟棄。
核心優(yōu)勢(shì):可輸出“雨天 50mm/h 下探測(cè) 80m、反射率 10% 行人的概率為 X%”這類量化結(jié)論,是生成魯棒性驗(yàn)證報(bào)告的關(guān)鍵。

(左)雨天 30mm/h 積水覆蓋率90%,(中)雨天 15mm/h 積水覆蓋率45%,(右)雨天 4mm/h 積水覆蓋率25%
04 ASAM OpenMATERIAL 3D新標(biāo)準(zhǔn)
1、精準(zhǔn)材料屬性的行業(yè)統(tǒng)一標(biāo)準(zhǔn)
ASAM于2025 年 3 月發(fā)布的OpenMATERIAL 3D,專注定義環(huán)境中物體的真實(shí)物理屬性:折射率、粗糙度、BRDF查找表、材質(zhì)密度等。
其優(yōu)勢(shì)包括:
(1)跨平臺(tái)協(xié)同建模:格式通用,支持 ASAM OpenDRIVE、OpenSCENARIO、OSI 等;
(2)適用于感知仿真:雷達(dá)、攝像頭、LiDAR 均可引用同一材質(zhì)庫(kù);
(3)動(dòng)態(tài)結(jié)構(gòu)兼容:支持如車輪等運(yùn)動(dòng)部件的層次結(jié)構(gòu)定義。
融合意義:物理建模所依賴的不只是參數(shù),更是材料本身——OpenMATERIAL 3D 從源頭打通了場(chǎng)景物理真實(shí)與傳感建模之間的壁壘。
aiSim Archer:對(duì)全新OpenMATERIAL 標(biāo)準(zhǔn) (ASAM OpenMATERIAL?3D)進(jìn)行了實(shí)現(xiàn)。
05 物理建模與標(biāo)準(zhǔn)的行業(yè)協(xié)同
從鏡頭畸變模型、CMOS 噪聲鏈到LiDAR 多回波和天氣衰減,物理級(jí)建模讓仿真的“數(shù)據(jù)表現(xiàn)”不再是肉眼看起來(lái)真,而是“行為上真實(shí)”。而標(biāo)準(zhǔn)化的材料規(guī)格,如ASAM OpenMATERIAL 3D,更是將它推向行業(yè)共識(shí)。
這一切,最終目標(biāo)都是構(gòu)建一個(gè)“可信仿真”的閉環(huán):真實(shí)物理參數(shù)驅(qū)動(dòng)的模型 → 標(biāo)準(zhǔn)化定義的材料屬性 → 支持跨平臺(tái)共享與驗(yàn)證 → 支撐自動(dòng)駕駛場(chǎng)景真實(shí)測(cè)試與算法驗(yàn)證。
而將這些關(guān)鍵模塊實(shí)現(xiàn)并集成于仿真平臺(tái)中(即aiSim所專注的),才是落地這一周期驗(yàn)證環(huán)路的技術(shù)核心。
具體的Raw 圖參數(shù)調(diào)教示例、LiDAR 參數(shù)配置樣板或圖示優(yōu)化建議可獲取
-
傳感器
+關(guān)注
關(guān)注
2565文章
52968瀏覽量
767111 -
仿真
+關(guān)注
關(guān)注
52文章
4283瀏覽量
135786 -
建模
+關(guān)注
關(guān)注
1文章
317瀏覽量
61580 -
驗(yàn)證
+關(guān)注
關(guān)注
0文章
63瀏覽量
15523 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14311瀏覽量
170558
發(fā)布評(píng)論請(qǐng)先 登錄
康謀分享 | 3DGS:革新自動(dòng)駕駛仿真場(chǎng)景重建的關(guān)鍵技術(shù)

康謀分享 | 自動(dòng)駕駛仿真進(jìn)入“標(biāo)準(zhǔn)時(shí)代”:aiSim全面對(duì)接ASAM OpenX

康謀分享 | 基于多傳感器數(shù)據(jù)的自動(dòng)駕駛仿真確定性驗(yàn)證

未來(lái)已來(lái),多傳感器融合感知是自動(dòng)駕駛破局的關(guān)鍵
自動(dòng)駕駛的到來(lái)
如何讓自動(dòng)駕駛更加安全?
自動(dòng)駕駛汽車中傳感器的分析
這些自動(dòng)駕駛傳感器,你了解多少?
轉(zhuǎn)發(fā):聊聊邊緣計(jì)算在自動(dòng)駕駛中的應(yīng)用場(chǎng)景
傳感器成自動(dòng)駕駛“硬實(shí)力” 有哪些
自動(dòng)駕駛仿真平臺(tái)概述

康謀分享 | 自動(dòng)駕駛聯(lián)合仿真——功能模型接口FMI(三)

康謀分享 | 汽車仿真與AI的結(jié)合應(yīng)用

康謀分享 | 直面AD/ADAS快速開(kāi)發(fā)挑戰(zhàn):IVEX自動(dòng)駕駛場(chǎng)景管理及分析平臺(tái)!

物理級(jí)傳感器仿真:破解自動(dòng)駕駛長(zhǎng)尾場(chǎng)景驗(yàn)證難題





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論