 高壓放大器在軟體機器人研究中的應用
高壓放大器在軟體機器人研究中的應用

一、引言
軟體機器人因其高度的柔韌性和適應性,在醫療、救援、工業等領域展現出巨大潛力。與傳統剛性機器人相比,軟體機器人能夠更好地適應復雜環境和執行精細任務。高壓放大器在軟體機器人的研究和開發中扮演著關鍵角色,為軟體機器人的驅動和控制提供了強大的支持。

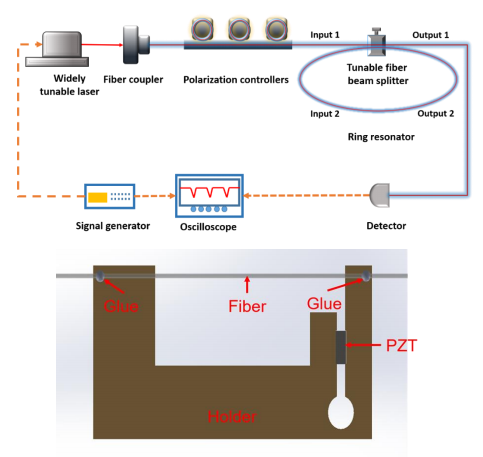
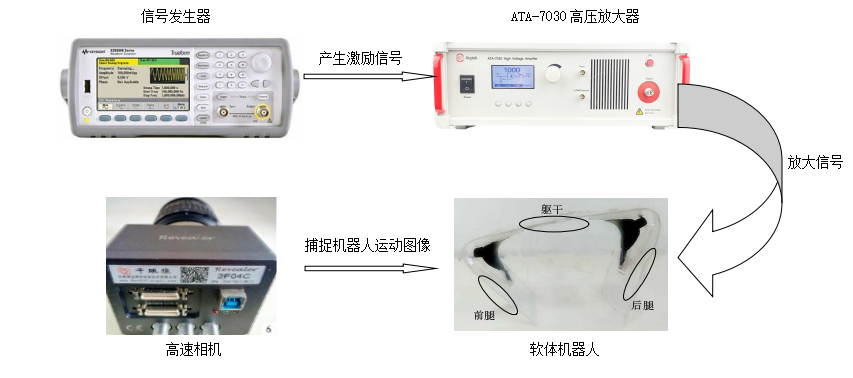
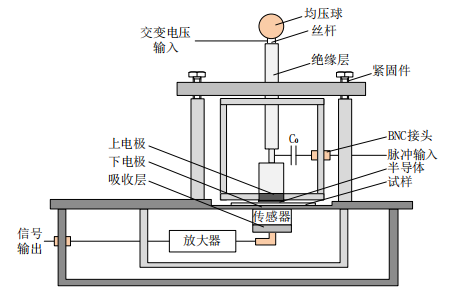
圖:高壓放大器在介電彈性體制成的軟機器人研究中的應用
二、高壓放大器在軟體機器人中的作用
(一)驅動柔性致動器
軟體機器人的核心組件之一是柔性致動器,這些致動器通常由介電彈性體(DE)等材料制成。介電彈性體在施加電壓后能夠產生顯著的機械變形,從而實現機器人的運動。高壓放大器能夠將低電壓信號放大到數千伏的高電壓,為介電彈性體提供足夠的電場強度,使其產生所需的變形。
(二)精確控制與信號放大
在軟體機器人的控制系統中,傳感器捕獲的信號通常非常微弱,需要通過高壓放大器進行放大,以便后續的信號處理和機器人響應。此外,高壓放大器還可以用于軟體機器人傳感器和執行器之間的通信,實現快速信號處理,提高機器人的響應速度和精度。
(三)支持復雜運動與高負載能力
高壓放大器能夠為軟體機器人提供足夠的能量,使其能夠執行復雜的運動和高負載任務。例如,在受尺蠖啟發的蠕動機器人研究中,通過高壓放大器驅動的軟體機器人能夠攜帶超過100g的負載,最大運輸速度可達8.54mm/s。
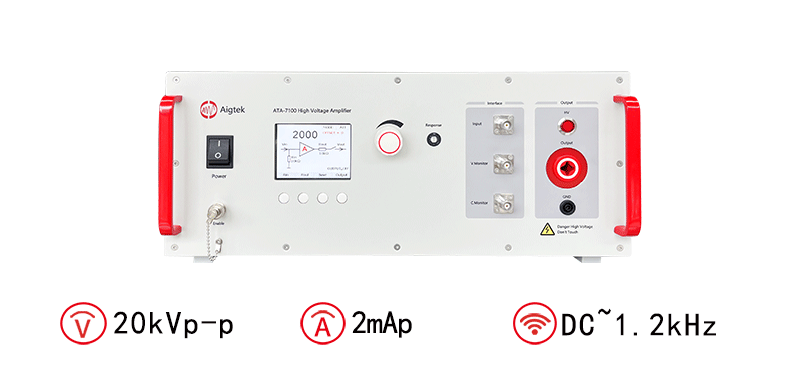
圖:ATA-7100高壓放大器指標參數
三、應用實例
(一)受水蛭啟發的軟機器人
在一項受水蛭啟發的軟機器人研究中,研究人員利用高壓放大器(ATA-7100)驅動介電彈性體肌肉,實現了軟機器人的兩棲運動、攀爬和負重爬行。實驗結果表明,高壓放大器能夠有效地驅動軟體機器人,使其在不同環境中表現出良好的適應性和穩定性。
(二)介電彈性體致動器
介電彈性體致動器(DEAs)是軟體機器人中常用的驅動元件。研究人員開發了一種超高壓放大器(UHV-Amp),能夠將12V直流電壓升壓至4kV,并通過計算機實現對放大器輸出的控制。這種放大器在驅動單層碳纖維粉末基DEAs方面表現出色,為軟體機器人的教育和研究提供了有力支持。
(三)摩擦電軟機器人
在摩擦電軟機器人研究中,高壓放大器(ATA-7100)與摩擦納米發電機(TENG)結合,為軟體機器人提供動力。實驗表明,這種組合能夠有效地驅動軟體機器人,使其在復雜環境中實現穩定的運動。
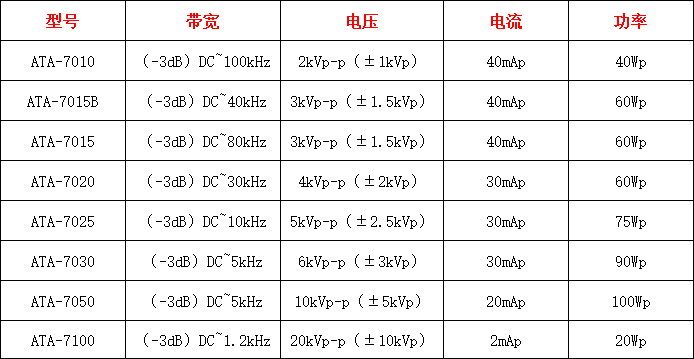
圖:ATA-7000系列高壓放大器指標參數
高壓放大器在軟體機器人研究中發揮著不可或缺的作用。它不僅能夠驅動柔性致動器,實現軟體機器人的精確運動控制,還能支持復雜運動和高負載任務。隨著技術的不斷進步,高壓放大器將不斷提高其工作效率和響應速度,為軟體機器人技術的發展提供更強大的支持。
審核編輯 黃宇
-
機器人
+關注
關注
213文章
29735瀏覽量
212850 -
高壓放大器
+關注
關注
4文章
651瀏覽量
14849
發布評論請先 登錄
安泰高壓放大器在介電高彈聚合物驅動器和軟體機器人中的應用

清華大學:軟體機器人柔性傳感技術最新研究進展

高壓放大器在水下撲翼軟體機器人研究中的應用

高壓放大器在軟體機器人特性測試中的應用

Aigtek高壓放大器在交變電場研究中的應用
高壓放大器在介電彈性體折紙術軟體機器人中的應用

安泰ATA-7015高壓放大器在機器人測試中的應用研究







 工商網監
工商網監
評論