") 機(jī)器學(xué)習(xí)賦能的智能光子學(xué)器件系統(tǒng)研究與應(yīng)用
機(jī)器學(xué)習(xí)賦能的智能光子學(xué)器件系統(tǒng)研究與應(yīng)用
騰訊會(huì)議---六月直播
1.機(jī)器學(xué)習(xí)賦能的智能光子學(xué)器件系統(tǒng)研究與應(yīng)用
2.COMSOL聲學(xué)多物理場仿真技術(shù)與應(yīng)用
3.超表面逆向設(shè)計(jì)及前沿應(yīng)用(從基礎(chǔ)入門到論文復(fù)現(xiàn))
4.智能光學(xué)計(jì)算成像技術(shù)與應(yīng)用
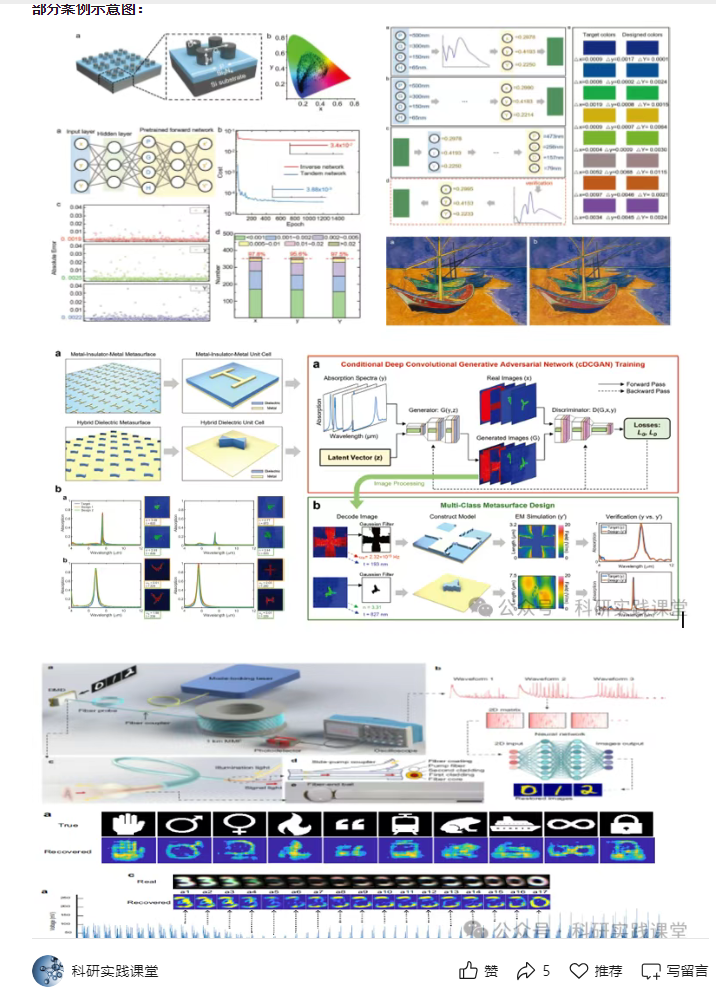
在人工智能與光子學(xué)設(shè)計(jì)融合的背景下,科研的邊界持續(xù)擴(kuò)展,創(chuàng)新成果不斷涌現(xiàn)。從理論模型的整合到光學(xué)現(xiàn)象的復(fù)雜模擬,從數(shù)據(jù)驅(qū)動(dòng)的探索到光場的智能分析,機(jī)器學(xué)習(xí)正以前所未有的動(dòng)力推動(dòng)光子學(xué)領(lǐng)域的革新。據(jù)調(diào)查,目前在Nature和Science雜志上發(fā)表的機(jī)器學(xué)習(xí)與光子學(xué)結(jié)合的研究主要集中在以下幾個(gè)方面:
0光子器件的逆向設(shè)計(jì):
通過機(jī)器學(xué)習(xí),特別是深度學(xué)習(xí),可以高效地進(jìn)行光子器件的逆向設(shè)計(jì),這在傳統(tǒng)的多參數(shù)優(yōu)化問題中尤為重要。
02超構(gòu)表面和超材料設(shè)計(jì)
機(jī)器學(xué)習(xí)被用于設(shè)計(jì)具有特定光學(xué)特性的超構(gòu)表面和超材料,這些材料在光場調(diào)控中發(fā)揮著重要作用。
利用光子器件構(gòu)建的神經(jīng)網(wǎng)絡(luò)可以進(jìn)行快速的矩陣-向量運(yùn)算,加速深度學(xué)習(xí)算法的執(zhí)行。
04非線性光學(xué)與光子芯片
非線性光學(xué)材料和非厄米拓?fù)涔庾訉W(xué)為高性能片上處理方案提供了新的可能性,智能光子芯片在全光計(jì)算、信號(hào)處理和量子技術(shù)等領(lǐng)域具有廣泛的應(yīng)用前景。
05智能光子系統(tǒng)的多任務(wù)優(yōu)化
通過深度學(xué)習(xí)與拓?fù)鋬?yōu)化的結(jié)合,可以同時(shí)優(yōu)化多個(gè)光子器件的功能,提高設(shè)計(jì)效率并保證性能。
06光譜分析與預(yù)測
機(jī)器學(xué)習(xí)模型能夠分析光譜數(shù)據(jù),預(yù)測材料特性或器件性能,這對于材料科學(xué)和光子器件的研發(fā)至關(guān)重要
機(jī)器學(xué)習(xí)光子學(xué)導(dǎo)論
1.1空間光學(xué)系統(tǒng)與集成微納光子學(xué)系統(tǒng)簡介
1.2為什么要在光學(xué)系統(tǒng)中引入機(jī)器學(xué)習(xí)方法
1.3人工智能和機(jī)器學(xué)習(xí)方法的基本概念與歷史
1.4機(jī)器學(xué)習(xí)方法在光子學(xué)設(shè)計(jì)中的應(yīng)用案例簡介
1.5基于光子學(xué)器件搭建的光學(xué)神經(jīng)網(wǎng)絡(luò)應(yīng)用簡介
光子器件仿真軟件基礎(chǔ)與基于優(yōu)化方法的器件逆向設(shè)計(jì)
2.1 光子學(xué)器件的主要設(shè)計(jì)目標(biāo)和調(diào)控思路
2.2 Ansys optics光子學(xué)仿真軟件操作簡介與使用技巧
案例操作:基于雙貝塞爾曲線的緊湊多模光學(xué)波導(dǎo)彎曲
案例操作:片上米散射結(jié)構(gòu)色超構(gòu)表面單元仿真
2.3 時(shí)域有限差分算法(FDTD)與空間傳播器件模擬方法
案例操作:傳播相位與幾何相位超構(gòu)單元仿真與平面超構(gòu)透鏡設(shè)計(jì)
2.4 片上波導(dǎo)器件仿真與片上超構(gòu)光學(xué)器件設(shè)計(jì)
案例操作:片上的超構(gòu)單元仿真與光學(xué)參數(shù)提取
2.5基于優(yōu)化算法的光子學(xué)逆向設(shè)計(jì)
2.5.1光子學(xué)逆向設(shè)計(jì)的概念與歷史
2.5.2基于粒子群算法的啟發(fā)式光子學(xué)器件優(yōu)化
案例操作:基于粒子群算法的光分束器設(shè)計(jì)
2.5.3擴(kuò)展:其他啟發(fā)式優(yōu)化方法簡介
2.5.4基于梯度方法的光子學(xué)器件拓?fù)鋬?yōu)化
案例操作:基于拓?fù)鋬?yōu)化方法的分束器設(shè)計(jì)
機(jī)器學(xué)習(xí)簡介與Python機(jī)器學(xué)習(xí)編程基礎(chǔ)
3.1 機(jī)器學(xué)習(xí)基礎(chǔ)概念
3.2 監(jiān)督學(xué)習(xí)與無監(jiān)督學(xué)習(xí)
3.3簡單常見機(jī)器學(xué)習(xí)算法簡介(如線性回歸、SVM等)
3.4 Python編程基礎(chǔ)
?Python語言與特點(diǎn)簡介
?基本語法與特色數(shù)據(jù)結(jié)構(gòu)(列表,元組,字典)
?Numpy科學(xué)計(jì)算庫的使用
?數(shù)據(jù)可視化工具M(jìn)atplotlib的使用
案例操作:繪制函數(shù)與分形圖形
3.5深度學(xué)習(xí)框架Pytorch和Tensorflow簡介
案例操作:回歸算法的實(shí)現(xiàn)
常用的深度神經(jīng)網(wǎng)絡(luò)簡介與Python實(shí)現(xiàn)
4.1深度學(xué)習(xí)簡介
4.2 神經(jīng)網(wǎng)絡(luò)基礎(chǔ)概念與結(jié)構(gòu)
4.3 深度學(xué)習(xí)的基本原理與反向傳播算法
4.4常用深度網(wǎng)絡(luò)模型簡介
?全連接網(wǎng)絡(luò)(FC)
?卷積神經(jīng)網(wǎng)絡(luò)(CNN)
?帶歷史記憶的網(wǎng)絡(luò)(如RNN)
4.5 案例操作:基于Python的幾種神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)
?全連接網(wǎng)絡(luò)
?卷積神經(jīng)網(wǎng)絡(luò)
?U-Net
4.6 案例操作:一個(gè)手寫數(shù)字識(shí)別網(wǎng)絡(luò)模型的搭建與訓(xùn)練
深度學(xué)習(xí)在微納光子學(xué)中的應(yīng)用
5.1 微納光子器件的基本原理與常見結(jié)構(gòu)
5.2 基于深度學(xué)習(xí)的光譜預(yù)測與逆向設(shè)計(jì)
案例分析:一維的和二維的全介質(zhì)和金屬SPR材料的光譜預(yù)測
案例操作:級(jí)聯(lián)網(wǎng)絡(luò)的超構(gòu)表面單元的光譜預(yù)測與逆向設(shè)計(jì)
5.3 基于機(jī)器學(xué)習(xí)的電磁近場預(yù)測和逆向設(shè)計(jì)
案例分析:大面積超構(gòu)表面的近場預(yù)測與逆向設(shè)計(jì)
5.4 基于深度學(xué)習(xí)的超構(gòu)單元生成
案例操作:基于生成-對抗網(wǎng)絡(luò)的自由超構(gòu)表面單元生成
深度學(xué)習(xí)在多種光學(xué)系統(tǒng)中的應(yīng)用
6.1 深度學(xué)習(xí)在多樣化的光學(xué)系統(tǒng)中的應(yīng)用簡介
6.2 深度學(xué)習(xí)在計(jì)算成像中的應(yīng)用
案例操作:基于深度學(xué)習(xí)的非線性光纖單像素超高速成像
6.3 深度學(xué)習(xí)在圖像處理中的應(yīng)用
光子學(xué)器件構(gòu)建的光學(xué)深度神經(jīng)網(wǎng)絡(luò)與應(yīng)用
7.1 光子學(xué)器件構(gòu)建的光學(xué)神經(jīng)網(wǎng)絡(luò)與應(yīng)用
7.2 主動(dòng)網(wǎng)絡(luò):光學(xué)矩陣-向量乘加運(yùn)算器與光學(xué)神經(jīng)網(wǎng)絡(luò)加速器
7.3 被動(dòng)網(wǎng)絡(luò):衍射光學(xué)神經(jīng)網(wǎng)絡(luò)
案例操作:基于片上衍射神經(jīng)網(wǎng)絡(luò)的超構(gòu)光學(xué)器件用于圖像分類
案例分析:基于衍射神經(jīng)網(wǎng)絡(luò)的太赫茲光學(xué)處理器(Science)
7.4光學(xué)神經(jīng)網(wǎng)絡(luò)的優(yōu)勢與挑戰(zhàn)總結(jié)
機(jī)器學(xué)習(xí)與光子學(xué)的更多應(yīng)用介紹與未來展望
8.1 深度學(xué)習(xí)增強(qiáng)微納光學(xué)芯片制造
案例分析:通過機(jī)器學(xué)習(xí)優(yōu)化工藝容差與器件性能
8.2 深度學(xué)習(xí)后處理——光學(xué)測量功能增強(qiáng)
案例分析:基于深度學(xué)習(xí)的高分辨紅外熱波段雷達(dá)
8.3非典型機(jī)器學(xué)習(xí)系統(tǒng)——萬物皆可機(jī)器學(xué)習(xí)(Nature)
*主要為最新應(yīng)用進(jìn)展簡介—根據(jù)課程時(shí)間及進(jìn)度靈活更新
公眾號(hào):科研實(shí)踐課堂
審核編輯 黃宇
-
機(jī)器學(xué)習(xí)
+關(guān)注
關(guān)注
66文章
8492瀏覽量
134106
發(fā)布評(píng)論請先 登錄
橋接智能制造:PROFINET與Devicenet混合架構(gòu)賦能汽車擦凈機(jī)器人升級(jí)

美格智能攜手高通啟動(dòng)2025邊緣智能創(chuàng)新應(yīng)用大賽,賦能端側(cè)AI革命

光伏電站智能運(yùn)維系統(tǒng)研究與應(yīng)用
汽車焊接機(jī)器人的智能控制系統(tǒng)研究進(jìn)展
HarmonyOS 應(yīng)用開發(fā)賦能套件:鴻蒙原生應(yīng)用開發(fā)的 “神助攻”
如何在光子學(xué)中利用電子生態(tài)系統(tǒng)

【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】1.初步理解具身智能
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】1.全書概覽與第一章學(xué)習(xí)
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】+初品的體驗(yàn)
《具身智能機(jī)器人系統(tǒng)》第1-6章閱讀心得之具身智能機(jī)器人系統(tǒng)背景知識(shí)與基礎(chǔ)模塊
什么是機(jī)器學(xué)習(xí)?通過機(jī)器學(xué)習(xí)方法能解決哪些問題?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論