") 多種轉(zhuǎn)子位置傳感器的比較
多種轉(zhuǎn)子位置傳感器的比較
導(dǎo)言
永磁電機(jī),例如無刷直流 (BLDC) 和永磁同步電機(jī) (PMSM) ,因其可靠性和低成本而廣泛應(yīng)用于機(jī)器人和工業(yè)自動化領(lǐng)域。它們具有高零速扭矩,可用作伺服電機(jī)。BLDC 電機(jī)通過交替給繞組通電來產(chǎn)生旋轉(zhuǎn)磁場以轉(zhuǎn)動轉(zhuǎn)子。準(zhǔn)確的轉(zhuǎn)子位置信息對于以正確的幅度和相位給繞組通電至關(guān)重要。
無傳感器算法使用反電動勢 (EMF) 進(jìn)行位置估計,但低速、高扭矩應(yīng)用由于反電動勢不足而需要專用傳感器。本文比較了多種轉(zhuǎn)子位置傳感器。
圖 1 顯示了帶有轉(zhuǎn)子位置傳感的典型 BLDC 電機(jī)控制器架構(gòu)。有多種傳感器可用于此類位置傳感,適當(dāng)?shù)剡x擇需要對應(yīng)用和傳感器技術(shù)有透徹的了解。需要考慮的關(guān)鍵參數(shù)包括精度、工作速度范圍、安裝公差、工作溫度、傳感器尺寸和形狀、外部磁場抗擾度、成本以及信號處理工作量。圖 2 顯示了電機(jī)位置傳感技術(shù)比較。
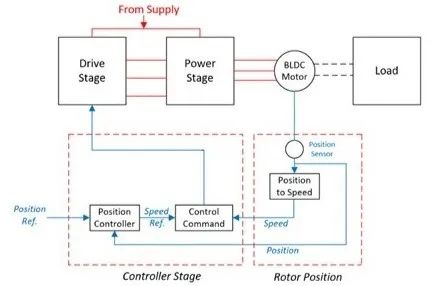
圖 1:帶轉(zhuǎn)子位置傳感圖的電機(jī)控制器

圖 2:電機(jī)位置傳感技術(shù)比較
光學(xué)編碼器由 LED、光電傳感器和帶有交替透明開口的碼盤組成(參見圖 3)。碼盤上的狹縫切割入射到光電傳感器上的光,提供角度信息。光學(xué)編碼器可以是絕對式(帶格雷碼輸出)或增量式(使用 3 個同心環(huán)進(jìn)行正向/反向和零位檢測)。它們以高速和高分辨率運(yùn)行,但容易受到污染、沖擊和振動的影響。由于 LED/光電二極管壽命有限,不建議在長時間運(yùn)行場景下使用光學(xué)編碼器,尤其是在惡劣溫度條件下。
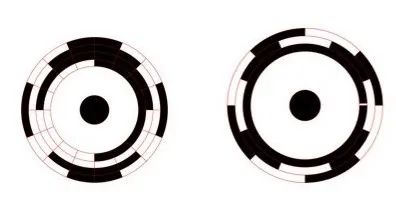
圖 3:光學(xué)編碼器 - 絕對位置(左)和增量式(右)
電容編碼器
電容編碼器由 3 個極板組成——發(fā)射器、調(diào)制器和接收器(參見圖 4)。它基于電容與分隔兩個帶電極板的介電材料成正比的原理工作。在發(fā)射器和接收器之間產(chǎn)生電場,轉(zhuǎn)子調(diào)制介電常數(shù) (ε),導(dǎo)致電容發(fā)生變化。這會調(diào)制發(fā)射器和接收器極板之間的電位差。通過使用多個調(diào)制軌跡來確定絕對位置。電容編碼器提供與光學(xué)編碼器相似的性能,并且更耐用,但它們對寄生和環(huán)境條件敏感,并且集成成本可能很高。
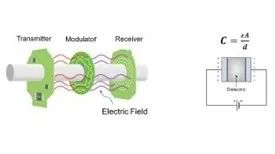
圖 4:電容編碼器技術(shù)
感應(yīng)式旋轉(zhuǎn)變壓器
感應(yīng)式旋轉(zhuǎn)變壓器是旋轉(zhuǎn)變壓器,具有 3 個線圈——一個勵磁線圈(初級)加上兩個正交線圈(次級)。安裝在轉(zhuǎn)子上的鐵芯耦合初級和次級繞組(參見圖 5)。勵磁線圈接收高頻交流信號,在正交線圈上感應(yīng)出幅度調(diào)制電壓,這些電壓相位差為 90°。通過對信號進(jìn)行整流并計算其電壓比的反正切來獲得角度信息。雖然旋轉(zhuǎn)變壓器比光學(xué)和電容編碼器更堅固,但它們的高分辨率輸出能力較差,并且成本高、重量大、體積大。
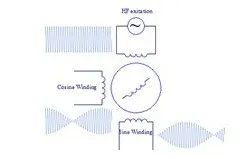
圖 5:感應(yīng)式旋轉(zhuǎn)變壓器圖
感應(yīng)傳感器基于電磁感應(yīng)工作,并使用 PCB 走線代替線圈繞組。傳感元件包括一個傳輸線圈、兩個接收線圈、一個 IC 和一個旋轉(zhuǎn)金屬靶(如圖 6 所示)。通過將外部電容器連接到傳輸線圈形成 LC 諧振電路,IC 以特定頻率激活傳輸線圈。靶材產(chǎn)生渦流,形成電磁場,在接收線圈中感應(yīng)出電動勢。正弦接收線圈調(diào)制感應(yīng)信號,而另一個(偏置 90°)次級線圈承載余弦信號。IC 使用反正切法計算角度。感應(yīng)傳感器在溫度變化、振動和外部磁場下表現(xiàn)良好。此外,它們可以以比旋轉(zhuǎn)變壓器更低的成本集成到更小的空間中。
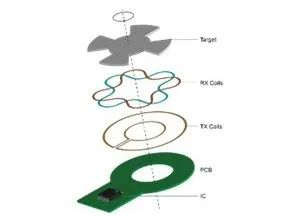
圖 6:感應(yīng)傳感器圖
磁傳感
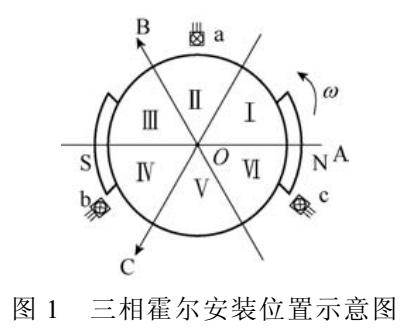
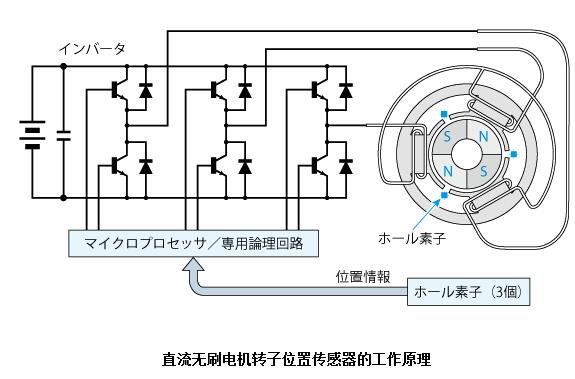
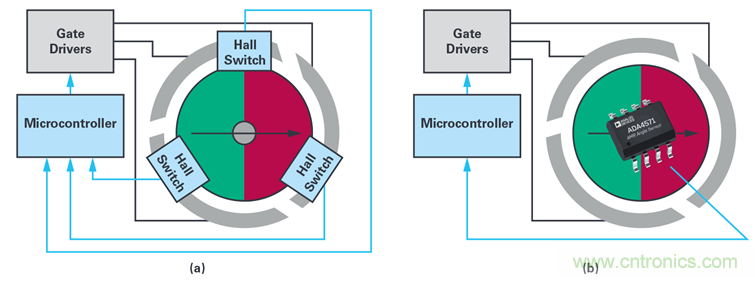
磁傳感器檢測附近磁鐵的位置,并用于轉(zhuǎn)子位置傳感。通常使用 3 種類型的磁傳感器——鎖存器、角度傳感器和線性器件。鎖存器在具有交替極性的特定磁場中動作,可以間隔 120° 放置在電機(jī)內(nèi)部以進(jìn)行粗略的轉(zhuǎn)子位置檢測(參見圖 7a)。角度傳感器響應(yīng)偶極磁鐵的角度(參見圖 7b)。它們針對磁場定向控制 (FOC) 排列中的精確角度信息進(jìn)行了優(yōu)化。可以使用反正切函數(shù)將正弦和余弦信號轉(zhuǎn)換為角度(參見圖 8)。磁傳感器成本低、緊湊、非接觸式且不受污染物影響。兩種主要技術(shù)是霍爾效應(yīng)和隧道磁阻 (TMR)。霍爾效應(yīng)器件已成熟,而 TMR 器件提供更高的分辨率、更低的噪聲和更低的功耗。

圖 7:轉(zhuǎn)子位置傳感器安裝 (a) 霍爾效應(yīng)鎖存器
(b) 軸上 (XY) 和軸外 (YZ) 排列的角度傳感器
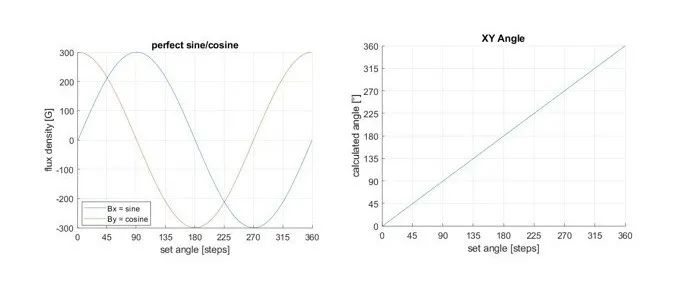
圖 8:原始磁場和計算角度
關(guān)鍵磁性和感應(yīng)式轉(zhuǎn)子位置傳感器規(guī)格
為使包含角度傳感器的 BLDC 電機(jī)驅(qū)動器正常運(yùn)行,必須考慮各種參數(shù)。傳感器應(yīng)正確編程和校準(zhǔn)以實(shí)現(xiàn)所需的性能。在使用先進(jìn)的電機(jī)驅(qū)動算法(例如 FOC)時,精度至關(guān)重要,其中需要精確的轉(zhuǎn)子位置角度(精度 <1°)。傳感器安裝選項(xiàng)包括軸端(傳感器和磁鐵在同一軸上)、軸e(傳感器圍繞軸,帶有環(huán)形磁鐵)或集成在電機(jī)組件內(nèi)的 3 個鎖存器。極數(shù)也很重要。電機(jī)極對影響電角度計算。機(jī)械角度乘以極對數(shù)得到電角度,但這也會放大任何角度誤差或噪聲。高速下角度傳感的延遲可能會導(dǎo)致額外的誤差。通過了解 RPM 和延遲,可以補(bǔ)償誤差。可調(diào)零角度設(shè)置補(bǔ)償內(nèi)部和外部磁鐵之間的對齊挑戰(zhàn)。
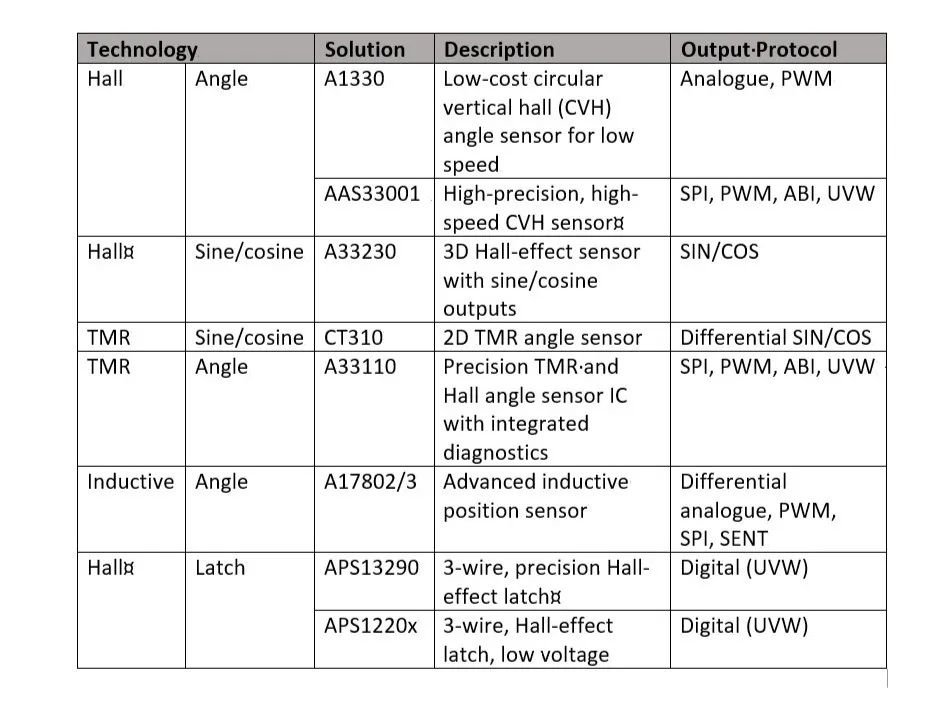
表 1:用于電機(jī)位置傳感的角度傳感器解決方案
其他重要規(guī)格包括電源電壓、氣隙、磁通密度、工作溫度范圍和安全要求。仔細(xì)考慮這些參數(shù)可確保高性能和高效的 BLDC 電機(jī)控制。
用于轉(zhuǎn)子位置傳感的傳感器安裝
角度傳感器可以軸端放置在 XY 平面中或當(dāng)機(jī)械限制阻止軸端放置時,可以軸側(cè)放置。軸端磁場均勻,無需數(shù)字處理即可提供準(zhǔn)確的角度信息。軸側(cè)排列由于非線性磁場,通常需要多點(diǎn)校準(zhǔn)才能獲得相似的精度。
角度位置傳感器中的輸出協(xié)議
有多種輸出協(xié)議可用于轉(zhuǎn)子位置傳感。線性傳感器提供與測量角度成比例的輸出。PWM 輸出占空比范圍為 0% 到 100%,模擬輸出范圍為 0 到 5V。微控制器將模擬讀數(shù)轉(zhuǎn)換為 0 到 360° 的范圍,由于延遲和數(shù)據(jù)轉(zhuǎn)換時間,適用于低速操作。正弦/余弦輸出因其成本較低而受到歡迎,使用反正切法計算角度。ABI 協(xié)議提供 3 個輸出——兩個相位差為 90° 的脈沖(A 和 B)和一個指示零位的索引脈沖。該協(xié)議用于高速操作,但需要在上電時使用索引脈沖來確定絕對位置。角度傳感器可以從絕對線性傳感器開始,然后切換到 ABI 以獲得組合優(yōu)勢。UVW 輸出模擬 3 個磁鎖存器,針對梯形 BLDC 電機(jī)控制進(jìn)行了優(yōu)化。此外,傳感器可以通過 UART、SPI、I2C 或 SENT 協(xié)議提供數(shù)字輸出。
結(jié)論
BLDC 電機(jī)控制器需要精確的角度信息以實(shí)現(xiàn)最佳效率目標(biāo)。磁性和感應(yīng)傳感器現(xiàn)在正在取代光學(xué)、電容和感應(yīng)式旋轉(zhuǎn)變壓器。它們?yōu)橄冗M(jìn)的電機(jī)控制算法提供了更小、更具成本效益的替代方案。角度傳感器在單個封裝中提供精確的角度信息,性能優(yōu)于 3 個分立的霍爾效應(yīng)鎖存器,此外它們還提供各種輸出協(xié)議以滿足微控制器要求。
-
傳感器
+關(guān)注
關(guān)注
2564文章
52619瀏覽量
763902 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
29508瀏覽量
211633 -
BLDC
+關(guān)注
關(guān)注
213文章
826瀏覽量
98019 -
電機(jī)控制器
+關(guān)注
關(guān)注
21文章
557瀏覽量
32596
發(fā)布評論請先 登錄
電機(jī)驅(qū)動中霍爾轉(zhuǎn)子位置傳感器介紹
電磁式位置傳感器
L78/G1F 無傳感器BLDC電機(jī) 初始轉(zhuǎn)子位置檢測
PMSM的有傳感器磁場定向控制的程序中是如何實(shí)現(xiàn)轉(zhuǎn)子初始位置定位的,原理是什么
曲軸位置傳感器有哪些類型
【原創(chuàng)】轉(zhuǎn)子位置傳感器之霍爾磁敏傳感器介紹
變速傳動中轉(zhuǎn)速估計和轉(zhuǎn)子位置傳感器分辨率的選擇及ST伺服方案介紹
霍爾轉(zhuǎn)子位置預(yù)估
曲軸位置傳感器工作原理
直流無刷電機(jī)轉(zhuǎn)子位置傳感器特點(diǎn)/工作原理/分類
如何使用電機(jī)位置傳感器來測量定子與轉(zhuǎn)子之間的相對位置
無感直流無刷電機(jī)的轉(zhuǎn)子位置檢測分析





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論