") Micro Controller OS微控制器操作系統(tǒng)應(yīng)用設(shè)計(jì)方案
Micro Controller OS微控制器操作系統(tǒng)應(yīng)用設(shè)計(jì)方案
uC/OS----Micro Controller OS微控制器操作系統(tǒng),美國(guó)人Jean Labrosse于1192年完成,1998年出現(xiàn)uC/OS--II,2000年NASA許可可用于飛行器中(無(wú)人機(jī)中有木有啊!但是很少有極客把他用到飛控中,APM的操作系統(tǒng)是一個(gè)裁剪的Linux--Nuxxt什么鬼的)。
uC/OS--II的性能特性不跟大家廢話了,大家自己去看它的中文手冊(cè)吧。有幾點(diǎn)要注意理解:
1.用戶任務(wù)只有56個(gè),因?yàn)橛?個(gè)是系統(tǒng)保留的,這有點(diǎn)像Linux下的系統(tǒng)服務(wù)daemons。如空閑任務(wù)、統(tǒng)計(jì)任務(wù)都是系統(tǒng)保留任務(wù)。
2.uC/OS中所有函數(shù)的調(diào)用和服務(wù)都有確定的時(shí)間,也就是說(shuō)函數(shù)的執(zhí)行周期確定、執(zhí)行時(shí)間確定,這個(gè)由統(tǒng)計(jì)任務(wù)OSTaskStat()來(lái)完成。
3.任務(wù)的優(yōu)先級(jí)就是它的標(biāo)識(shí)符,最低優(yōu)先級(jí) OS_LOWEST_PRIOR=63。
下面進(jìn)入主題--任務(wù)機(jī)制:
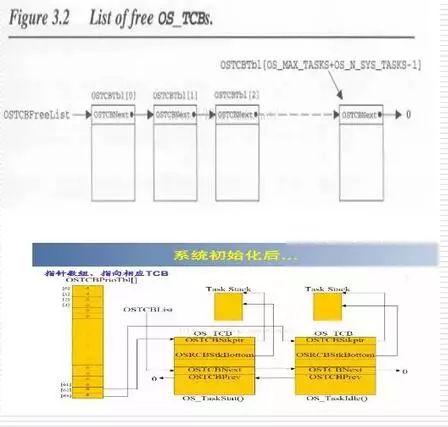
任務(wù)控制塊TCB:TCB是描述任務(wù)的核心數(shù)據(jù)結(jié)構(gòu),存放了它的各種管理信息,包括任務(wù)堆棧指針,任務(wù)的狀態(tài)、優(yōu)先級(jí),任務(wù)鏈表指針等; 一旦務(wù)建立了,任務(wù)控制塊OS_TCB將被賦值。
typedef struct os_tcb
{
棧指針;
INT16U OSTCBId; /*任務(wù)的ID*/
鏈表指針;
OS_EVENT *OSTCBEventPtr; /*事件指針*/
void *OSTCBMsg; /*消息指針*/
INT8U OSTCBStat; /*任務(wù)的狀態(tài)*/
INT8U OSTCBPrio; /*任務(wù)的優(yōu)先級(jí)*/
其他……
}OS_TCB;
-
OSTCBStkPtr:指向當(dāng)前任務(wù)棧頂?shù)闹羔槪總€(gè)任務(wù)可以有自己的棧,棧的容量可以是任意的;
-
OSTCBStkBottom:執(zhí)行任務(wù)棧底的指針;
-
OSTCBStkSize:棧的容量,用可容納的指針數(shù)目而不是字節(jié)數(shù)(Byte)來(lái)表示。
值得一提的是鏈表指針,這個(gè)設(shè)計(jì)可以快速的使任務(wù)就緒和休眠。所有的務(wù)控制塊分屬于兩條不同的鏈表,單向的空閑鏈表(頭指針OSTCBFreeList)和雙向的使用鏈表(頭指針為OSTCBList); OSTCBNext、OSTCBPrev:用于將任務(wù)控制塊插入到空閑鏈表或使用鏈表中。每個(gè)任務(wù)的任務(wù)控制塊在任務(wù)創(chuàng)建的時(shí)候被鏈接到使用鏈表中,在任務(wù)刪除的時(shí)候從鏈表中被刪除。雙向連接的鏈表使得一成員都能快速插入或刪除。
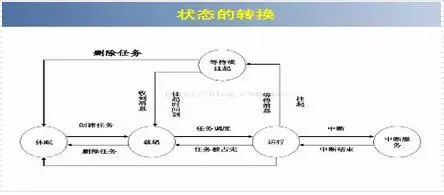
任務(wù)的五個(gè)狀態(tài):休眠、就緒、運(yùn)行、中斷、掛起(阻塞)。
各狀態(tài)間的相互轉(zhuǎn)換:
好了,既然一共有64個(gè)任務(wù),那我是怎么知道現(xiàn)在到底該運(yùn)行哪個(gè)任務(wù)呢?這就是任務(wù)就緒表的工作了。
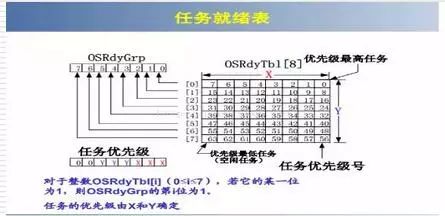
多列幾種就緒情況會(huì)發(fā)現(xiàn),OSRdyGrp和OSRdyTbl[]的賦值與優(yōu)先級(jí)priority有一定的關(guān)系哦。我們先列一個(gè)編碼表叫OSMapTbl[7]=2^n.n=0.1.2...7(同理就有OSUnMapTbl[7])。可以得到這個(gè)公式:
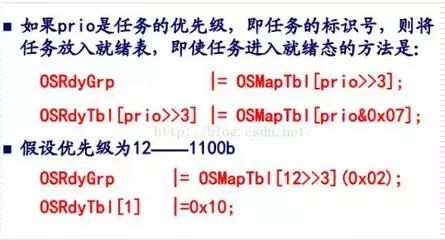
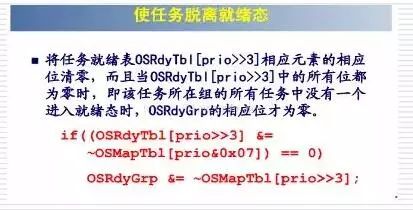
說(shuō)明OSRdyGrp與優(yōu)先級(jí)的高三位有關(guān)、OSRdyTbl與優(yōu)先級(jí)的低三位有關(guān).通過(guò)上面公式就可以把相應(yīng)的任務(wù)標(biāo)志為就緒狀態(tài)。既然有讓他進(jìn)入就緒態(tài)的方法,也就有讓他解除就緒狀態(tài)--休眠態(tài)的方法:
任務(wù)的調(diào)度。前面的準(zhǔn)備工作做好了之后,下面就可以真正的運(yùn)行任務(wù)了。確定哪個(gè)務(wù)的優(yōu)先級(jí)最高,應(yīng)該選擇哪個(gè)任務(wù)去運(yùn)行,這部分的工作是由調(diào)度器(Scheduler)來(lái)完成的。任務(wù)級(jí)的調(diào)度是由函數(shù)OSSched()完成的;中斷級(jí)的調(diào)度是由另一個(gè)函數(shù)OSIntExt()完成的。
首先根據(jù)就緒表確定最高優(yōu)先級(jí)。然后根據(jù)最高優(yōu)先級(jí)替換當(dāng)前任務(wù)的TCB,進(jìn)行上下文切換。
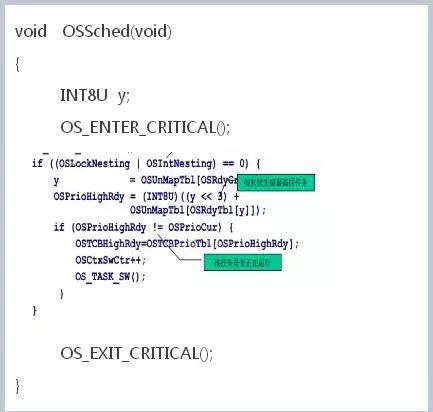
oid OSSched(void)
{
INT8U y;
OS_ENTER_CRITICAL();
OS_EXIT_CRITICAL();
}
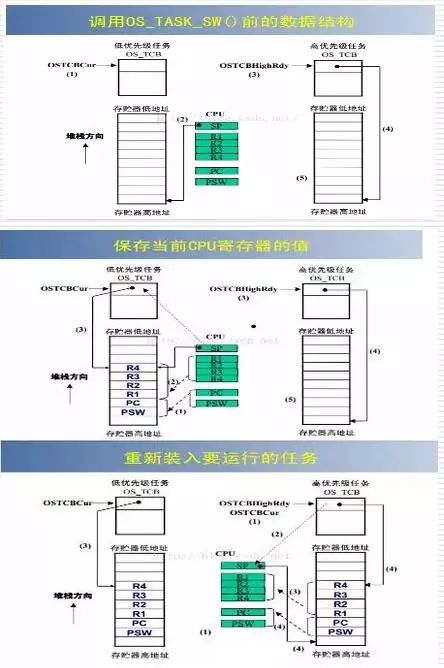
可以看到實(shí)際執(zhí)行任務(wù)切換的是OS_TASK_SW()函數(shù)(也就是OSCtxSW()),我們看下任務(wù)切換的過(guò)程:
-
嵌入式
+關(guān)注
關(guān)注
5138文章
19521瀏覽量
314587 -
Linux
+關(guān)注
關(guān)注
87文章
11454瀏覽量
212711 -
uCOS
+關(guān)注
關(guān)注
7文章
175瀏覽量
79312
原文標(biāo)題:重拾uC/OS-II之任務(wù)機(jī)制理解
文章出處:【微信號(hào):mcuworld,微信公眾號(hào):嵌入式資訊精選】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
儒卓力推出基于英飛凌微控制器的AI控制系統(tǒng)
中國(guó)汽車(chē)報(bào):睿賽德攜“程翧整車(chē)基礎(chǔ)軟件OS”亮相操作系統(tǒng)年會(huì)

FPGA 與微控制器優(yōu)缺點(diǎn)比較
嵌入式系統(tǒng)中微控制器與微處理器的區(qū)別

ESP32 微控制器系列指南
面向功能安全應(yīng)用的汽車(chē)開(kāi)源操作系統(tǒng)解決方案

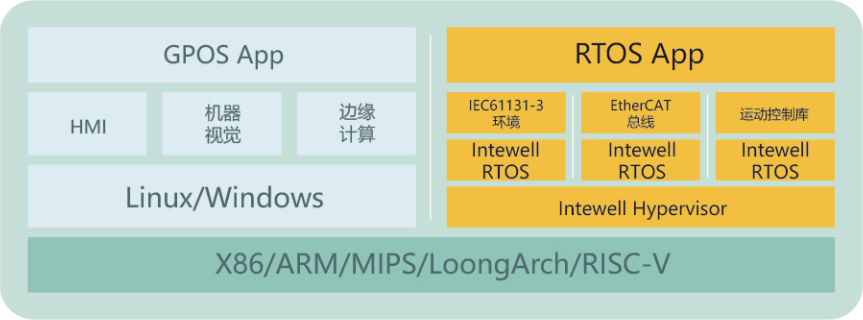
基于鴻道Intewell操作系統(tǒng)的運(yùn)動(dòng)控制系統(tǒng)方案
為了學(xué)習(xí)內(nèi)核開(kāi)發(fā),大佬手搓了一個(gè)輕量級(jí)操作系統(tǒng)YiYiYa OS
通用串行總線控制器怎么安裝
微控制器內(nèi)部的存儲(chǔ)器有哪些
微控制器的結(jié)構(gòu)和應(yīng)用
國(guó)產(chǎn)鴻道Intewel操作系統(tǒng)與Codesys高實(shí)時(shí)虛擬化運(yùn)動(dòng)控制解決方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論