 柔性機器人堪比章魚,看似“柔若無骨”的背后有哪些黑科技呢?
柔性機器人堪比章魚,看似“柔若無骨”的背后有哪些黑科技呢?
有這樣一種神奇的機器人,它可以做到這樣……
像藤蔓一樣自生長,柔軟的身體延伸運動到各種角落; 或者像章魚一樣,整個身體沒有任何硬性的結構組織,就像《超能陸戰隊》里的大白;
柔性機器人 “Octobot”
哈佛大學的研究者們此前展示了他們的最新研究成果:一款章魚形狀的完全柔性機器人 “Octobot”。這款機器人全身都由軟軟的柔性材料構成,不需要外接動力,自己就能運動起來。浙江大學的李鐵風教授及其他研究人員此前在《Science》發表了一篇名為《Fast-moving soft electronic fish(快速移動的電子魚)》的文章,闡述了他們研發的一種柔性機器人,柔性的特征使得這條“電子魚”得以在狹小的空間內航行,拓寬了它們能夠行駛的空間。
基于折紙設計的柔性機器人
水凝膠材質的軟體機器人
MIT的一個研究團隊就做了嘗試性的試驗,他們用 3D 打印和激光切割打造出水凝膠的外殼,實現“身體”的“柔韌性”,然后通過液壓驅動的方式驅動機器人的運動。
再就是通過一些特殊的材料來打造類似于人造肌肉的材料,像電子動力聚合物(EAP)、形狀記憶合金這樣的物質都是人造肌肉的良好材料,以形狀記憶合金為例,它可以根據溫度自動改變形狀,并且能夠記住這些形狀,實現彎曲、變短、抓取物體等動作。
除此之外,還有一種新興的功能材料室溫液態金屬,這種材料在 電、磁、力、熱的作用下,可以在不同的形態和運動模式上任意切換。中國科學院理化技術研究所研究員、清華大學教授劉靜在其撰寫的室溫液態金屬綜述文章中也曾寫道,“液態金屬可變形機器效應的發現,有望促成柔性機器理論與技術取得重大突破。”
電力驅動or氣動驅動,都還不是盡善盡美的解決方案
而在驅動方式上,從材料的組成可以看出其實大部分還是通過電動驅動,相比于其他驅動方式,電動驅動器擁有變形大、能量密度高、結構緊湊、重量輕、價格低和噪音小的特性。但是這種驅動方式也有很大的隱患,機器人的運動精度控制上有難度,另一方面,如果驅動機器人運動所需的電場強度過高,也會影響它在一定范圍內的運動。
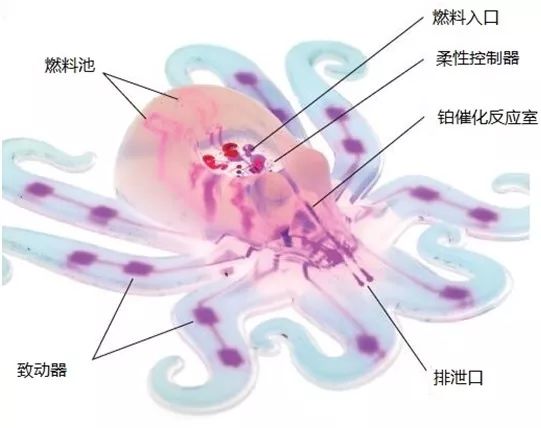
當然,還有一種氣動驅動方式,之前我們提到的哈佛大學推出的柔性章魚機器人Octobot ,就是通過簡單的過氧化氫分解化學反應實現運動,作為“燃料”的過氧化氫遇到鉑催化劑會產生水和氧氣,而氧氣增多會讓章魚體內的壓強加大,經過反復的切換讓其動起來。
雖然應用前景廣泛,但目前還在紙上談兵階段
盡管柔性機器人的研究難點很多,但它也是許多高校實驗室研發的一大重點,因為從實用性來考量的話,這種柔性機器人非常適合一些“極端”的場景下,比如受災現場的救援:它可以進入到一些危險、狹小的地方;還有海底探索上,柔性機器人可以潛入到像珊瑚礁這樣的海底生物內,在不傷害它們的同時去探索更多的海底秘密。
哈佛大學發布的可植入軟體機器人
醫療方面,柔性機器人也是一大利器,如果醫生想要針對人體內的某個器官對癥下藥,就可以通過柔性機器人實現,科羅拉多大學博爾德分校實驗室的機械工程師Franck Vernerey就研制出了專門用于醫藥治療的軟體機器人。另外,在他還看來,醫藥領域應用的機器人,只能以軟體蠕動的形式構造。
結語
簡單梳理柔性機器人的概念之后,小編非常期待它落地應用后給我們生活帶來的變革性變化,而文中列舉的很多實驗室案例也表明柔性機器人的研究一直在進行中,假以時日,等待相關技術的成熟,必然會在機器人行業大放異彩。
原文標題:一文讀懂柔性機器人,看似“柔若無骨”的背后有哪些黑科技
文章出處:【微信號:mcuworld,微信公眾號:嵌入式資訊精選】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
當機器人遇上“語言障礙”:CCLINKIE轉Profinet的“破冰外掛”來啦\\!
盤點#機器人開發平臺
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
奧比中光亮相2025機器人全產業鏈接會
清華大學:軟體機器人柔性傳感技術最新研究進展

【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】+初品的體驗

清華大學:軟體機器人柔性傳感技術最新研究進展

柔性電子技術革新與人形機器人的電子皮膚應用前景

柔性機器人與剛性機器人區別與聯系






 工商網監
工商網監
評論